Pololu Blog » User Profile: Ben » Posts by Ben »
Posts by Ben (Page 3)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Independence Day sale going on now!

We are having an Independence Day sale starting now through Monday, July 8! Check out the sale page for more information. Please note that we will be closed Thursday, July 4 in observance Independence Day, so orders placed after 2 PM Pacific Time Wednesday, July 3 will be shipped on Friday, July 5.
New products: 1.4-7V fine-adjust D30V3xMALx step-down voltage regulators
|
|


We are now offering lower-voltage versions of our D30V3x step-down voltage regulators with a precision-adjustable 1.4 V to 7 V output. As with the rest of the D30V3x line, these new regulators work with input voltages between 3.3 V and 45 V and can deliver between 1 A and 4.5 A of output current, depending on the input and output voltages. They have very low dropout voltages and feature a power-good output for identifying when the output voltage is not being maintained. They also feature an enable pin with a precise threshold for turning off the regulator, and some of the versions have additional circuitry to offer a precision-adjustable low-voltage cutoff.
 |
 |
Four versions are available with this new 1.4 V to 7 V output range:
- D30V30MAL – compact (0.6″ × 1.0″), double-sided assembly with precision-adjustable output and no low-voltage cutoff.
- D30V30MALCMA – compact (0.6″ × 1.0″), double-sided assembly precision-adjustable output and precision-adjustable low-voltage cutoff.
- D30V33MAL – larger (0.9″ × 1.2″), single-sided assembly with precision-adjustable output and no low-voltage cutoff. The increased heat dissipation from the larger boards let this version deliver slightly more current than the D30V30MAL.
- D30V33MALCMA – larger (0.9″ × 1.2″), single-sided assembly with precision-adjustable output and precision-adjustable low-voltage cutoff. The increased heat dissipation from the larger boards let this version deliver slightly more current than the D30V30MALCMA.
 |
 |
The following table shows all of the members of the D30V3x family:
| Regulator | Output voltage | Typical max output current1 |
Input voltage2 | Adjustable low-voltage cutoff |
Size | Price |
|---|---|---|---|---|---|---|
| #4891: D30V30F3 | 3.3 V | 3.7 A | 3.3 V – 45 V | – | 0.7″ × 0.8″ | $19.95 |
| #4892: D30V30F5 | 5 V | 3.4 A | 5 V – 45 V | $19.95 | ||
| #4893: D30V30F6 | 6 V | 3.3 A | 6 V – 45 V | $20.95 | ||
| #4894: D30V30F7 | 7.5 V | 3 A | 7.5 V – 45 V | $20.95 | ||
| #4895: D30V30F9 | 9 V | 2.9 A | 9 V – 45 V | $20.95 | ||
| #4896: D30V30F12 | 12 V | 2.8 A | 12 V – 45 V | $20.95 | ||
| #4897: D30V30F15 | 15 V | 2.7 A | 15 V – 45 V | $20.95 | ||
| #4873: D30V30MAL | 1.4 V – 7 V | 3.4 A | 3.3 V – 45 V | – | 0.6″ × 1.0″ | $25.95 |
| #4872: D30V30MALCMA | $29.95 | |||||
| #4875: D30V30MAS | 4.2 V – 15 V | 3 A | 4.2 V – 45 V | – | $25.95 | |
| #4874: D30V30MASCMA | $29.95 | |||||
| #4853: D30V33MAL | 1.4 V – 7 V | 3.8 A | 3.3 V – 45 V | – | 0.9″ × 1.2″ | $25.95 |
| #4852: D30V33MALCMA | $29.95 | |||||
| #4855: D30V33MAS | 4.2 V – 15 V | 3.3 A | 4.2 V – 45 V | – | $25.95 | |
| #4854: D30V33MASCMA | $29.95 | |||||
| 1At 30 V in. Actual achievable continuous output current is a function of input and output voltages and is limited by thermal dissipation. | ||||||
| 2Operating voltage must be higher than the set output voltage and is subject to dropout voltage considerations. | ||||||
Memorial Day sale going on now!

We’re having a big Memorial Day Sale that includes over 1000 products from robots to regulators to sensors to motors, and more! Check out the sale page for more information. Please note that we will be closed Monday, so orders placed after 2 PM Pacific Time Friday, May 24 will be shipped on Tuesday, May 28. Continued…
New products: Micro Metal Gearmotors with integrated encoders
|
|


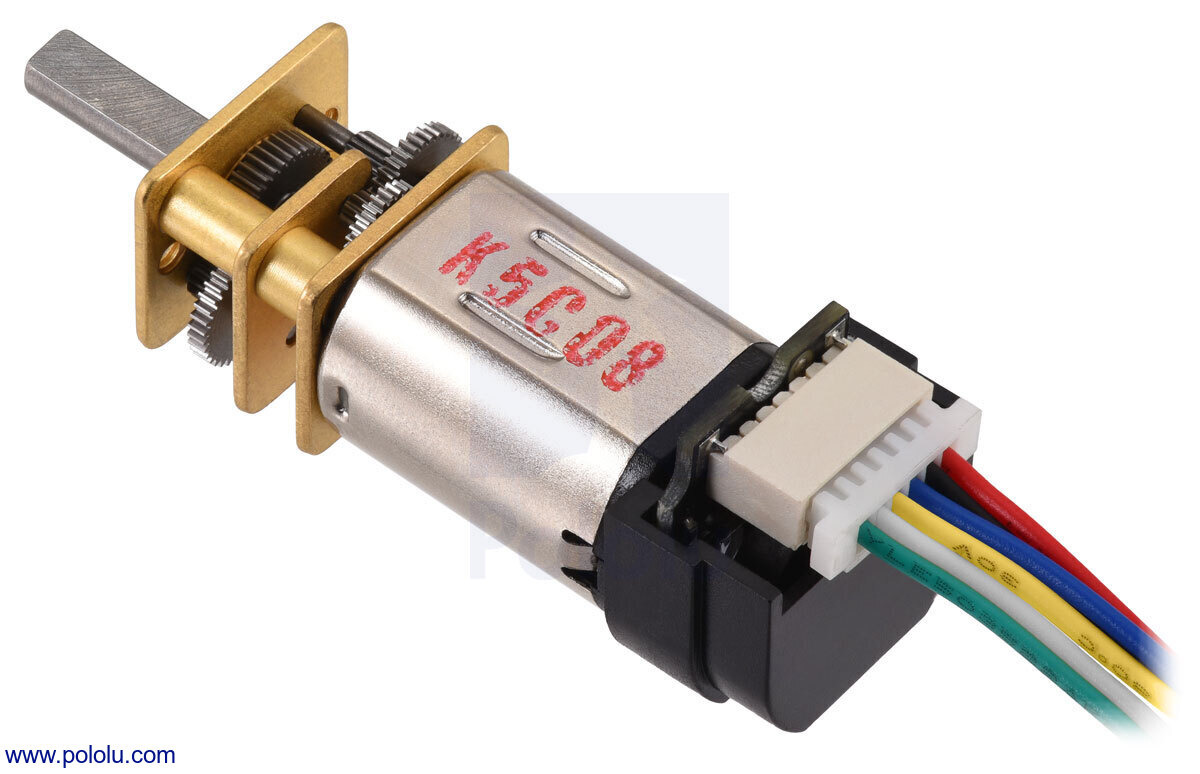
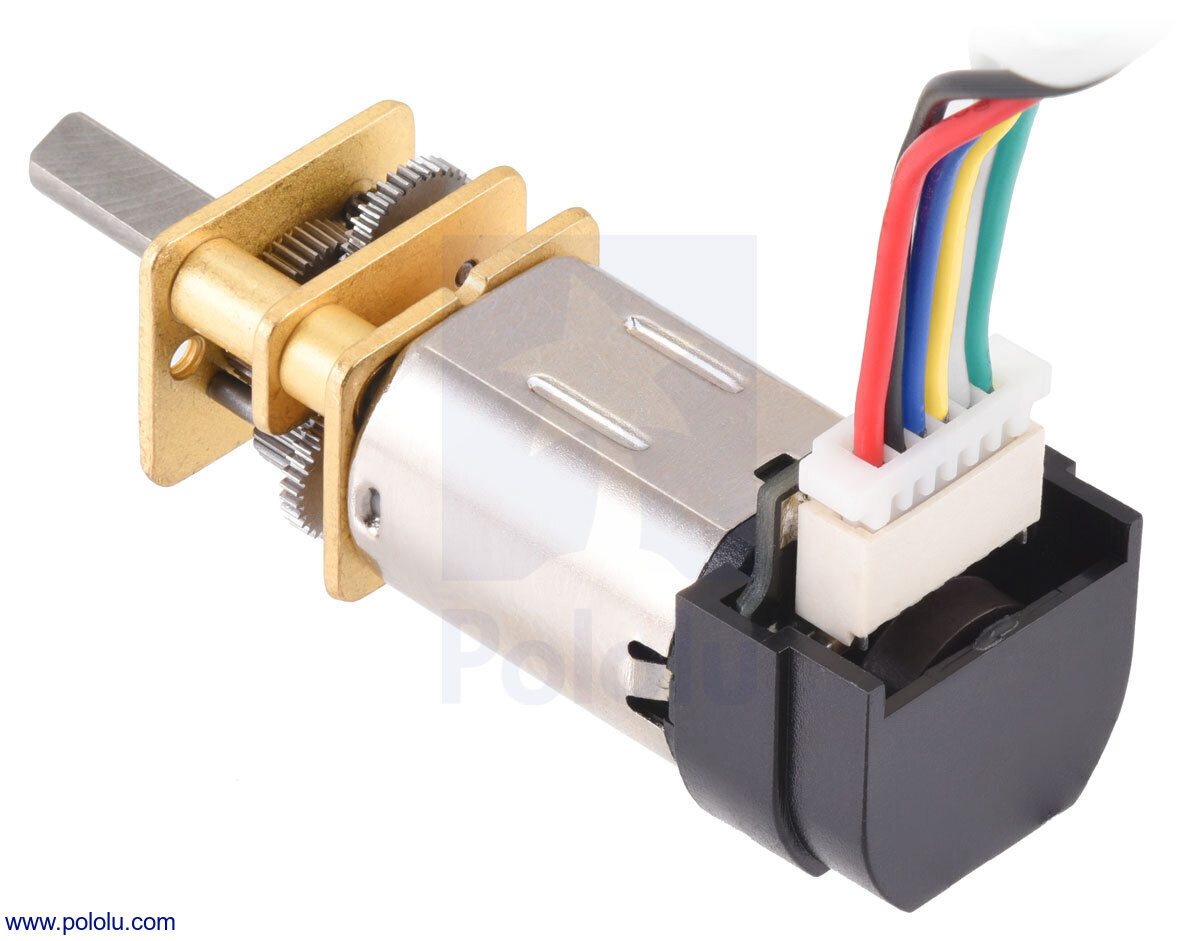
Our Micro Metal Gearmotors are now available with integrated quadrature encoders! These are the same top-entry and side-entry encoders that were previously only available separately, and now you can get them preassembled on the gearmotors and covered by a snap-on plastic cap. On the assembled units, the two available styles are denoted as “Back Connector”, which has the connector oriented parallel to the motor, and “Side Connector”, which is perpendicular to the motor. These connectors work with our assortment of female 6-pin JST SH-style cables and 6-pin JST SH-style connector boards.
|
|
For detailed dimensions, specifications, and usage information, see the Micro Metal Gearmotor datasheet (5MB pdf).
With 65 different combinations of gearboxes and motors each now available with two encoder styles, that makes 130 new products in all, and it increases our total Micro Metal Gearmotor selection to 260 versions. We are still working on getting everything stocked up, but we manufacture these in house, so we can make some of any particular version quickly. If there is a version you want that is currently out of stock, you can backorder it and we should be able to make and ship it in a few days. (Please note that we are currently not stocking the 5:1 versions with encoders but we are able to make them by special request; please contact us if you are interested in placing a special order for those.) Here is a full list of all the available options now:
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
 No Encoder |
 w/ Extended Motor Shaft |
 w/ Encoder, Back Conn. |
 w/ Encoder, Side Conn. |
|
|---|---|---|---|---|---|---|---|---|---|---|---|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HPCB 12V (high-power, carbon brushes) |
|||||||||||
| 12 V | 0.75 A | 100 mA | 6800 | 0.09 | 1.3 | – | 5:1 | #3036 | #3047 | #5204 | #5205 |
| 80 mA | 3400 | 0.17 | 2.4 | 1.5 | 10:1 | #3037 | #3048 | #5206 | #5207 | ||
| 2200 | 0.25 | 3.5 | 1.4 | 15:1 | #4788 | #4789 | #5208 | #5209 | |||
| 1100 | 0.39 | 5.4 | 1.1 | 30:1 | #3038 | #3049 | #5210 | #5211 | |||
| 650 | 0.67 | 9.3 | 1.1 | 50:1 | #3039 | #3050 | #5212 | #5213 | |||
| 450 | 1.0 | 14 | 1.1 | 75:1 | #3040 | #3051 | #5214 | #5215 | |||
| 330 | 1.3 | 18 | 1.1 | 100:1 | #3041 | #3052 | #5216 | #5217 | |||
| 220 | 1.8 | 25 | 1.0 | 150:1 | #3042 | #3053 | #5218 | #5219 | |||
| 160 | 2.5 | 35 | 1.0 | 210:1 | #3043 | #3054 | #5220 | #5221 | |||
| 130 | 3.0 | 42 | 1.1 | 250:1 | #3044 | #3055 | #5222 | #5223 | |||
| 110 | 3.3 | 46 | 1.0 | 298:1 | #3045 | #3056 | #5224 | #5225 | |||
| 85 | 5.0 | 69 | 1.1 | 380:1 | #4798 | #4799 | #5226 | #5227 | |||
| 35 | 10 | 140 | – | 1000:1 | #3046 | #3057 | #5228 | #5229 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HPCB 6V (high-power, carbon brushes) |
|||||||||||
| 6 V | 1.5 A | 170 mA | 6500 | 0.09 | 1.3 | – | 5:1 | #3060 | #3082 | #5178 | #5179 |
| 150 mA | 3300 | 0.17 | 2.4 | 1.3 | 10:1 | #3061 | #3071 | #5180 | #5181 | ||
| 2100 | 0.25 | 3.5 | 1.3 | 15:1 | #4786 | #4787 | #5182 | #5183 | |||
| 1100 | 0.45 | 6.2 | 1.2 | 30:1 | #3062 | #3072 | #5184 | #5185 | |||
| 650 | 0.74 | 10 | 1.2 | 50:1 | #3063 | #3073 | #5186 | #5187 | |||
| 430 | 1.1 | 15 | 1.3 | 75:1 | #3064 | #3074 | #5188 | #5189 | |||
| 330 | 1.6 | 22 | 1.3 | 100:1 | #3065 | #3075 | #5190 | #5191 | |||
| 220 | 2.0 | 28 | 1.1 | 150:1 | #3066 | #3076 | #5192 | #5193 | |||
| 160 | 2.8 | 39 | 1.1 | 210:1 | #3067 | #3077 | #5194 | #5195 | |||
| 130 | 3.2 | 44 | 1.1 | 250:1 | #3068 | #3078 | #5196 | #5197 | |||
| 110 | 3.4 | 47 | 1.0 | 298:1 | #3069 | #3079 | #5198 | #5199 | |||
| 85 | 5.0 | 69 | 1.1 | 380:1 | #4796 | #4797 | #5200 | #5201 | |||
| 33 | 11 | 150 | – | 1000:1 | #3070 | #3080 | #5202 | #5203 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HP 6V (high-power) |
|||||||||||
| 6 V | 1.6 A | 120 mA | 6100 | 0.11 | 1.5 | – | 5:1 | #1000 | #2210 | #5152 | #5153 |
| 100 mA | 3100 | 0.22 | 3.0 | 1.6 | 10:1 | #999 | #2211 | #5154 | #5155 | ||
| 2000 | 0.30 | 4.2 | 1.5 | 15:1 | #4784 | #4785 | #5156 | #5157 | |||
| 1000 | 0.57 | 7.9 | 1.5 | 30:1 | #1093 | #2212 | #5158 | #5159 | |||
| 590 | 0.86 | 12 | 1.3 | 50:1 | #998 | #2213 | #5160 | #5161 | |||
| 410 | 1.3 | 18 | 1.4 | 75:1 | #2361 | #2215 | #5162 | #5163 | |||
| 310 | 1.7 | 24 | 1.3 | 100:1 | #1101 | #2214 | #5164 | #5165 | |||
| 210 | 2.4 | 33 | 1.2 | 150:1 | #997 | #2386 | #5166 | #5167 | |||
| 150 | 3.0 | 42 | 1.1 | 210:1 | #996 | #2216 | #5168 | #5169 | |||
| 120 | 3.4 | 47 | 1.1 | 250:1 | #995 | #2217 | #5170 | #5171 | |||
| 100 | 4.0 | 56 | 1.1 | 298:1 | #994 | #2218 | #5172 | #5173 | |||
| 84 | 5.5 | 76 | 1.1 | 380:1 | #4794 | #4795 | #5174 | #5175 | |||
| 31 | 12 | 170 | – | 1000:1 | #1595 | #2373 | #5176 | #5177 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| MP 6V (medium-power) |
|||||||||||
| 6 V | 0.67 A | 80 mA | 4400 | 0.06 | 0.8 | – | 5:1 | #2362 | #2376 | #5126 | #5127 |
| 70 mA | 2200 | 0.11 | 1.5 | – | 10:1 | #2363 | #2377 | #5128 | #5129 | ||
| 1400 | 0.20 | 2.8 | 0.70 | 15:1 | #4782 | #4783 | #5130 | #5131 | |||
| 720 | 0.33 | 4.6 | 0.57 | 30:1 | #2364 | #2378 | #5132 | #5133 | |||
| 420 | 0.54 | 7.5 | 0.55 | 50:1 | #2365 | #2379 | #5134 | #5135 | |||
| 290 | 0.78 | 11 | 0.54 | 75:1 | #2366 | #2380 | #5136 | #5137 | |||
| 220 | 0.94 | 13 | 0.50 | 100:1 | #2367 | #2381 | #5138 | #5139 | |||
| 150 | 1.3 | 18 | 0.48 | 150:1 | #2368 | #2382 | #5140 | #5141 | |||
| 100 | 1.7 | 24 | 0.46 | 210:1 | #2369 | #2383 | #5142 | #5143 | |||
| 88 | 2.2 | 31 | 0.48 | 250:1 | #2370 | #2384 | #5144 | #5145 | |||
| 73 | 2.4 | 33 | 0.44 | 298:1 | #2371 | #2385 | #5146 | #5147 | |||
| 57 | 3.6 | 50 | 0.53 | 380:1 | #4792 | #4793 | #5148 | #5149 | |||
| 22 | 6.7 | 93 | – | 1000:1 | #2372 | #3059 | #5150 | #5151 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| LP 6V (low-power) |
|||||||||||
| 6 V | 0.36 A | 50 mA | 2500 | 0.05 | 0.7 | – | 5:1 | #1100 | #2200 | #5100 | #5101 |
| 40 mA | 1300 | 0.10 | 1.4 | – | 10:1 | #1099 | #2201 | #5102 | #5103 | ||
| 860 | 0.17 | 2.4 | 0.37 | 15:1 | #4780 | #4781 | #5104 | #5105 | |||
| 450 | 0.29 | 4.0 | 0.31 | 30:1 | #993 | #2202 | #5106 | #5107 | |||
| 270 | 0.44 | 6.1 | 0.29 | 50:1 | #1098 | #2203 | #5108 | #5109 | |||
| 180 | 0.64 | 8.9 | 0.29 | 75:1 | #2360 | #2209 | #5110 | #5111 | |||
| 130 | 0.74 | 10 | 0.25 | 100:1 | #992 | #2204 | #5112 | #5113 | |||
| 90 | 1.1 | 15 | 0.25 | 150:1 | #1097 | #2205 | #5114 | #5115 | |||
| 65 | 1.6 | 22 | 0.25 | 210:1 | #1096 | #2206 | #5116 | #5117 | |||
| 54 | 1.7 | 24 | 0.23 | 250:1 | #1095 | #2207 | #5118 | #5119 | |||
| 45 | 2.0 | 28 | 0.22 | 298:1 | #1094 | #2208 | #5120 | #5121 | |||
| 36 | 2.9 | 40 | 0.27 | 380:1 | #4790 | #4791 | #5122 | #5123 | |||
| 13 | 5.5 | 76 | – | 1000:1 | #1596 | #3058 | #5124 | #5125 | |||
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for instantaneous torque is 2.5 kg⋅cm (35 oz⋅in) for the 380:1 and 1000:1 gearboxes, and 2 kg⋅cm (25 oz⋅in) for all the other gear ratios; we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes, especially for the versions that use high-power (HP and HPCB) motors; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
Related products


New product: VL53L8CX Time-of-Flight 8×8-Zone Distance Sensor Carrier
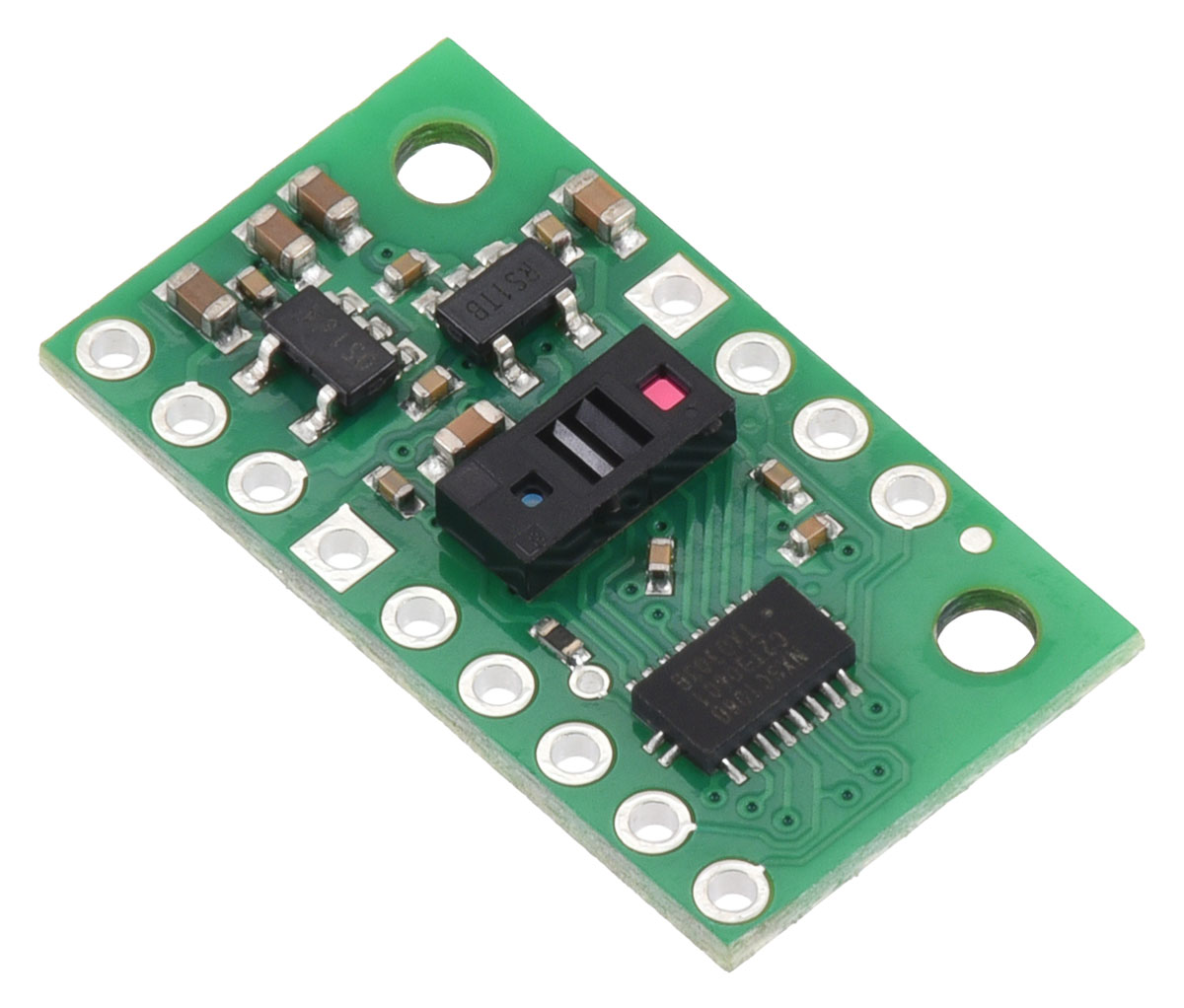 |
I’m excited to announce the release of our new VL53L8CX Time-of-Flight 8×8-Zone Distance Sensor Carrier, a multi-zone rangefinder based on ST’s latest VL53L8CX FightSense distance sensor. It uses time-of-flight (TOF) readings of infrared laser light to precisely measure distances of multiple targets across a grid of multiple zones, allowing you to generate a depth map with up to 8×8 resolution and 4 m range. Relative to older similar sensors, such as the VL53L5CX, the VL53L8CX also offers improved performance in ambient light and adds an SPI interface that can significantly speed up initialization and data acquisition. Since it has the same FOV and multi-zone capability, you can think of the VL53L8CX as basically an upgraded version of the VL53L5CX.
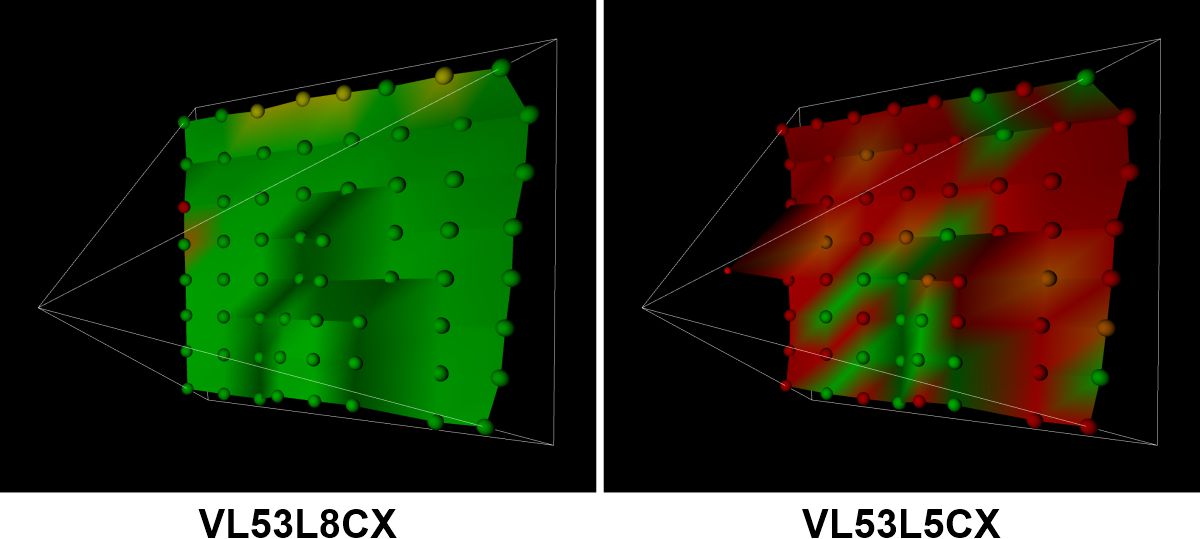 |
Visualization of VL53L8CX and VL53L5CX sensing a person standing against a wall about 2.7 m away. The VL53L8CX gives more accurate measurements with higher confidence (indicated with green). |
|---|
Compared to sensors that only give a 1D measurement, the VL53L8CX does demand more from a microcontroller to support its operation as a 3D lidar. Initializing the sensor through I²C or SPI and processing its data requires a lot of RAM and program memory, so it is not practical to use the VL53L8CX with most 8-bit MCUs like the Arduino Uno. We found that the Raspberry Pi Pico’s RP2040 microcontroller worked well for interfacing with the VL53L8CX, and other similarly powerful 32-bit controllers like an ESP32 should also work.
With the release of this module, we now have seven pin-compatible carriers for ST’s various FlightSense time-of-flight sensors:
 VL6180X carrier |
 VL53L0X carrier |
 VL53L1X carrier |
 VL53L3CX carrier |
 VL53L5CX carrier |
 VL53L7CX carrier |
 VL53L8CX carrier |
|
|---|---|---|---|---|---|---|---|
| Maximum range:(1) | 60 cm | 200 cm | 400 cm | 500 cm | 400 cm | 350 cm | 400 cm |
| Minimum range: | ~1 cm | ~3 cm | 4 cm | 1 cm | 2 cm | 2 cm | 2 cm |
| Field of view: | 25° | 25° | 15° to 27° diagonal, programmable |
25° | 65° diagonal, up to 8×8 zones |
90° diagonal, up to 8×8 zones |
65° diagonal, up to 8×8 zones |
| Other features: | ambient light sensing, low memory footprint(2) |
low memory footprint(2) | low memory footprint(2) | multi-target detection | multi-target detection | multi-target detection | multi-target detection, improved performance in ambient light |
| Maximum update rate:(1) | ~150 Hz | 50 Hz | 100 Hz | 125 Hz | 60 Hz | 60 Hz | 60 Hz |
| Operating voltage range: | 2.6 V to 5.5 V | 2.5 V to 5.5 V | 3.2 V to 5.5 V | ||||
| Regulator voltage: | 2.8 V | 3.3 V | 1.8 V and 3.3 V | ||||
| Typical active-ranging supply current: |
25 mA | 20 mA | 20 mA | 20 mA | 100 mA | 100 mA | 100 mA |
| Peak supply current: | 40 mA | 40 mA | 40 mA | 40 mA | 150 mA | 150 mA | 150 mA |
| Interface: | I²C | I²C, SPI | |||||
| Dimensions: | 0.5″ × 0.7″ | 0.5″ × 0.9″ | |||||
| 1-piece price: | $18.95 | $19.95 | $22.95 | $19.95 | $19.95 | $19.95 | $24.95 |
| 1 Effective range and update rate depend on configuration, target, and environment. 2 Suitable for use with typical 8-bit MCUs. |
|||||||
Related products

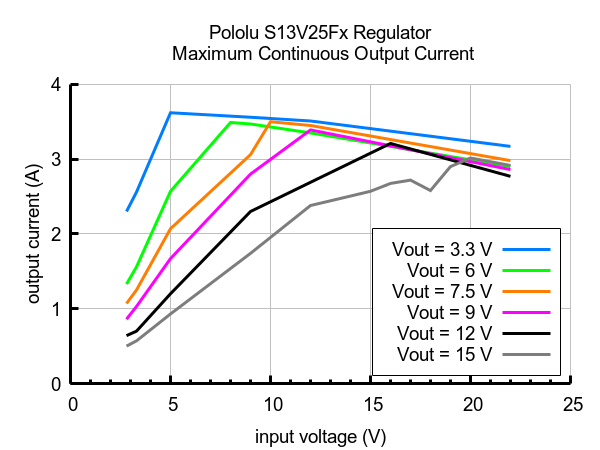
New products: S13V25Fx step-up/step-down voltage regulators with fixed 3.3V to 15V output voltages
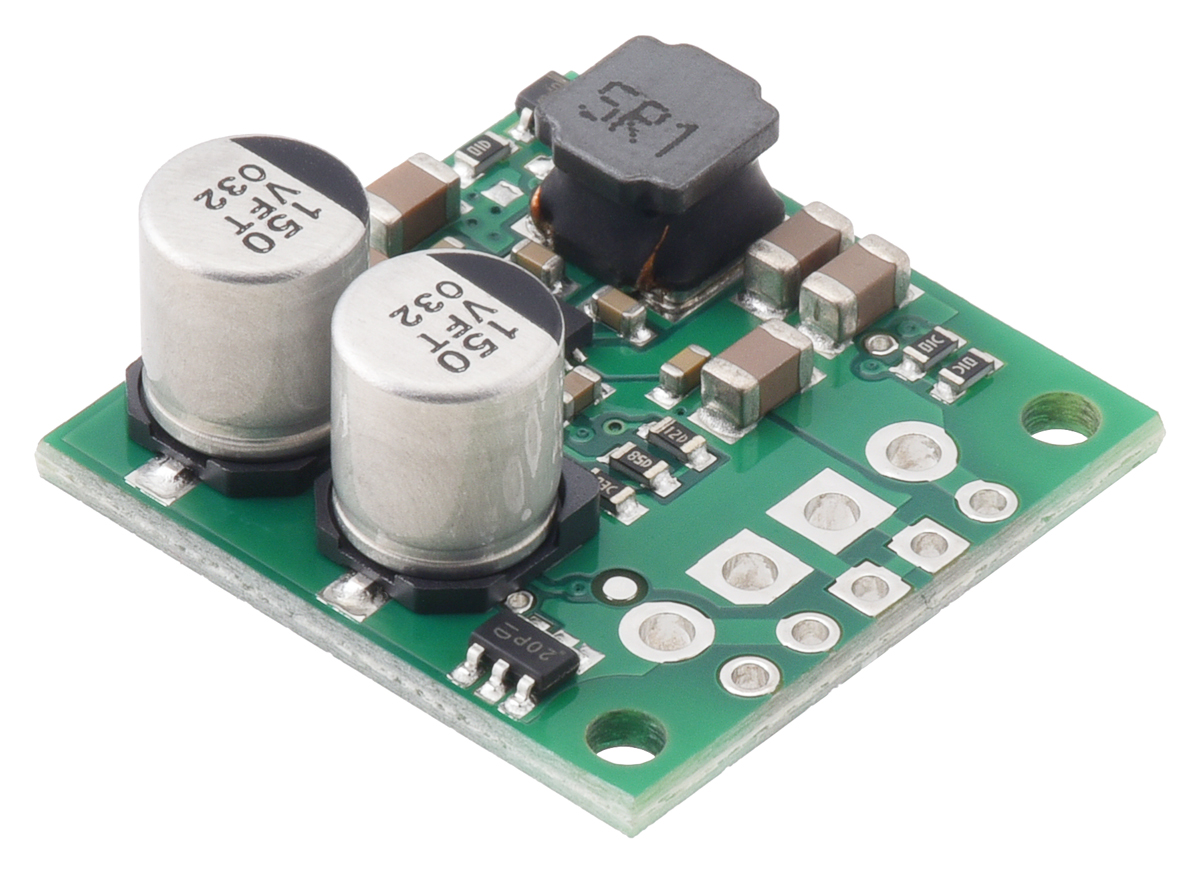 |
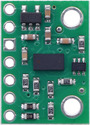
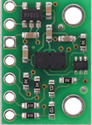
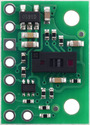
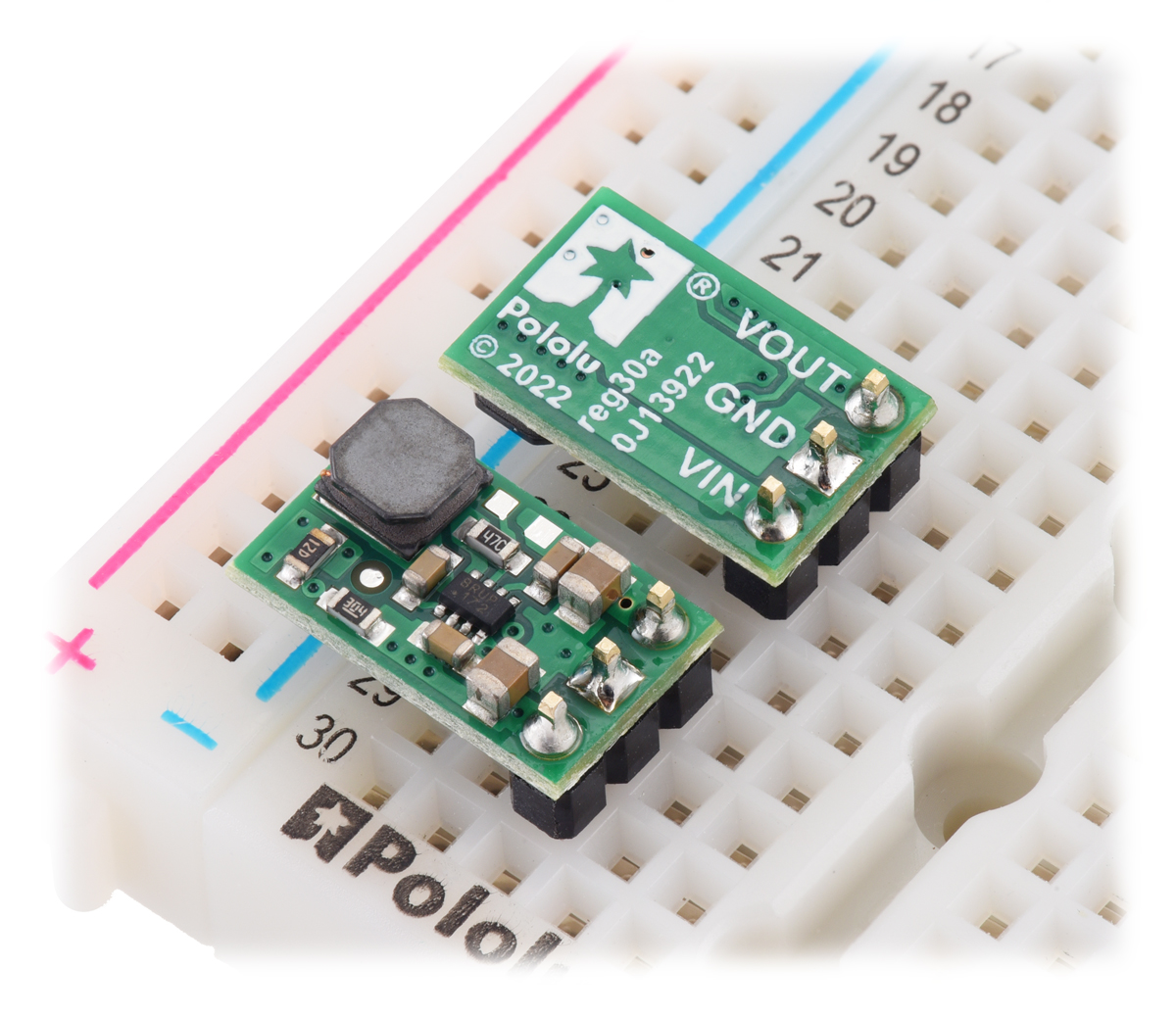
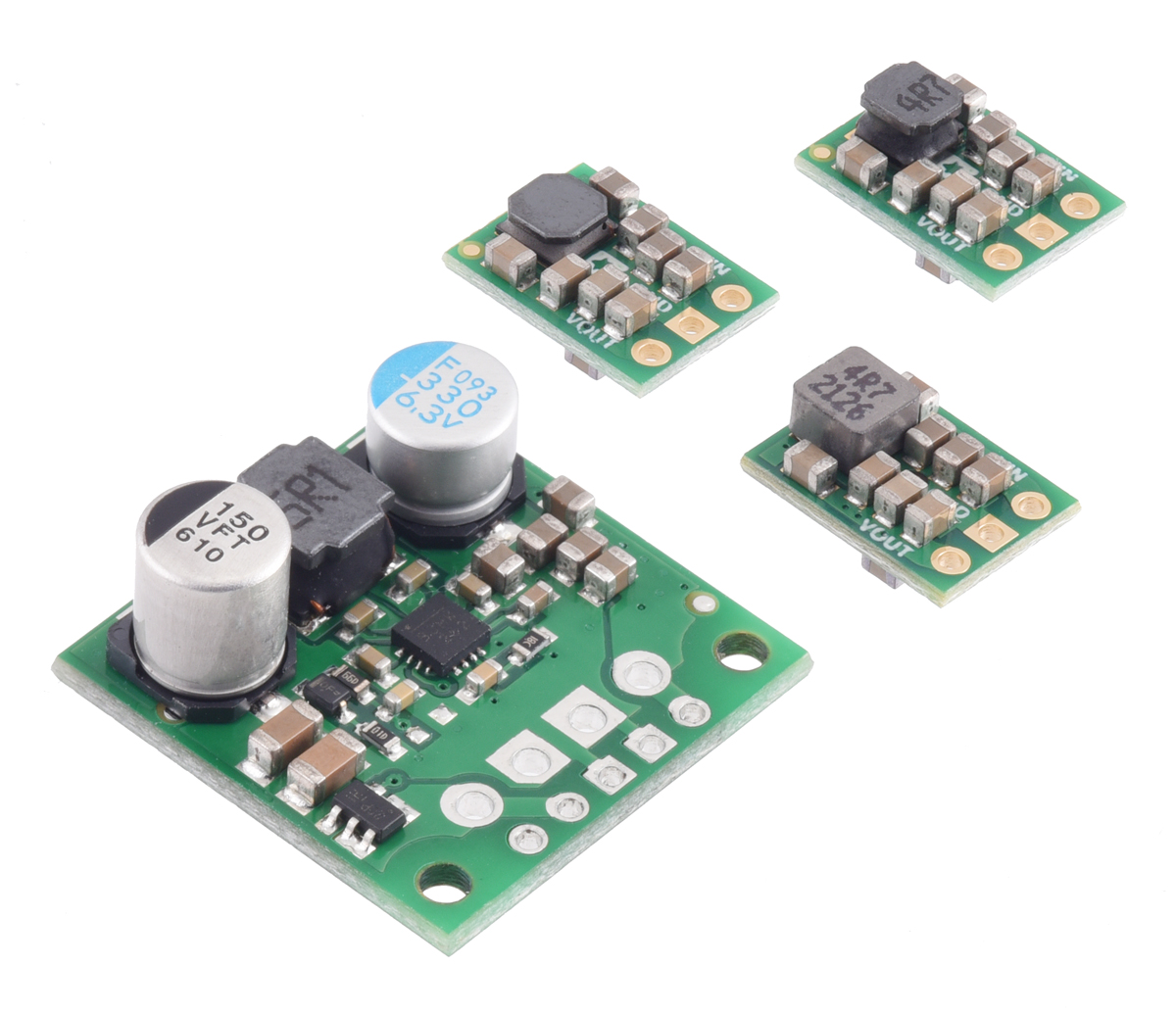
We have expanded our S13VxFx family of step-up/step-down voltage regulators to include options with a variety of output voltages from 3.3 V to 15 V. Like the original 5 V members of the family, these new S13V25Fx units take an input voltage from 2.8 V to 22 V and efficiently increase it or decrease it as necessary to produce the regulated output voltage. Even with their compact 0.9″ × 0.9″ size, they can deliver typical continuous output currents between 1 A and 3 A, making them our most powerful buck-boost converters. (That’s almost half the size of our previously highest-power step-up/step-down units, the S18V20Fx family, which are still being impacted by the global semiconductor shortages.) The graphs below show a more complete picture of the kinds of currents you can expect for different combinations of input and output voltages:
 |
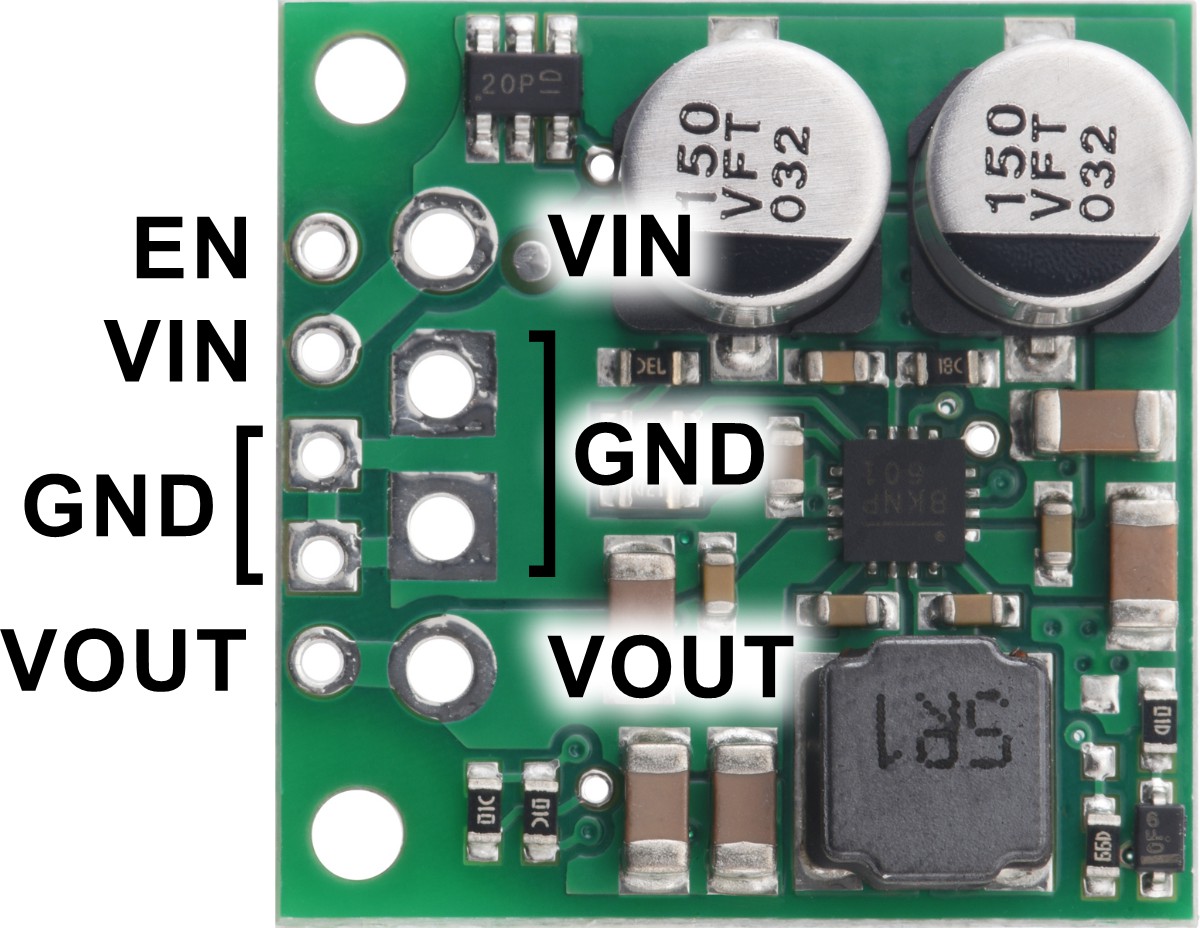
These new S13V25Fx versions do not include a 5V option because we already have that in the S13V30F5. They are pin-compatible with that 5V module and have the same overall board dimensions, but please note that the tall components (i.e. electrolytic capacitors and inductor) are in different locations. Here is a comparison of the new S13V25Fx regulators (left) next to the S13V30F5 (right):
|
|

This table shows what the full family looks like now:
| Regulator | Output voltage | Typical max continuous output current | Input voltage range | Typical efficiency | Size | Price |
|---|---|---|---|---|---|---|
| #4083: S13V10F5 | 5 V | 1 A | 2.8 V – 22 V | 85% – 95% | 0.35″ × 0.475″ | $9.95 |
| #4084: S13V15F5 | 5 V | 1.5 A | $12.49 | |||
| #4085: S13V20F5 | 5 V | 2 A | $17.95 | |||
| #4082: S13V30F5 | 5 V | 3 A | 0.9″ × 0.9″ | $17.95 | ||
| #4980: S13V25F3 New! | 3.3 V | 2.5 A | $18.95 | |||
| #4981: S13V25F6 New! | 6 V | 2.5 A | $18.95 | |||
| #4982: S13V25F7 New! | 7.5 V | 2.5 A | $18.95 | |||
| #4983: S13V25F9 New! | 9 V | 2.5 A | $18.95 | |||
| #4984: S13V25F12 New! | 12 V | 2.5 A | $18.95 | |||
| #4985: S13V25F15 New! | 15 V | 2.5 A | $18.95 |
As a reminder, we manufacture these boards in-house at our Las Vegas facility, so we have the flexibility to make these regulators with custom fixed output voltages. If the voltage you need is not one of our standard options and you are interested in customization, please contact us.
Related products










3pi+ 2040 Robot full release with additional motor options
 |
We have transitioned from our initial early-adopter release to a full release of the 3pi+ 2040 Robot family! With the full release, we also have some additional motor options. Here’s the full lineup:
| 3pi+ 2040 Version | Products | Micro Metal Gearmotor | Top Speed | Comments |
|---|---|---|---|---|
| Standard Edition | assembled or kit | 30:1 MP 6V | 1.5 m/s | good combination of speed and controllability |
| Turtle Edition | assembled or kit | 75:1 LP 6V | 0.4 m/s | longest battery life, easiest to control, good for swarm robots or introductory robotics courses |
| Hyper Edition | assembled or kit | 15:1 HPCB 6V | ~4 m/s | very fast and difficult to control, easy to damage; only recommended for advanced users |
The Turtle Edition is a great choice for educational environments or anyplace else where slow, controlled speed is important. On the flip side, the Hyper Edition uses high-power motors with a low-gear-ratio gearbox to offer a LOT of speed, but this also means reduced control and a higher risk of the robot damaging itself, so we only recommend it for advanced users who want to push the limits of what this robot platform can do. We also make the 3pi+ 2040 control board and 3pi+ chassis available separately for those who would like to do something custom with one of our many other Micro Metal Gearmotor options.
To recap from our early adopter release announcement, this robot combines our 3pi+ chassis with the power of the Raspberry Pi RP2040 microcontroller, and it’s full of cool features:
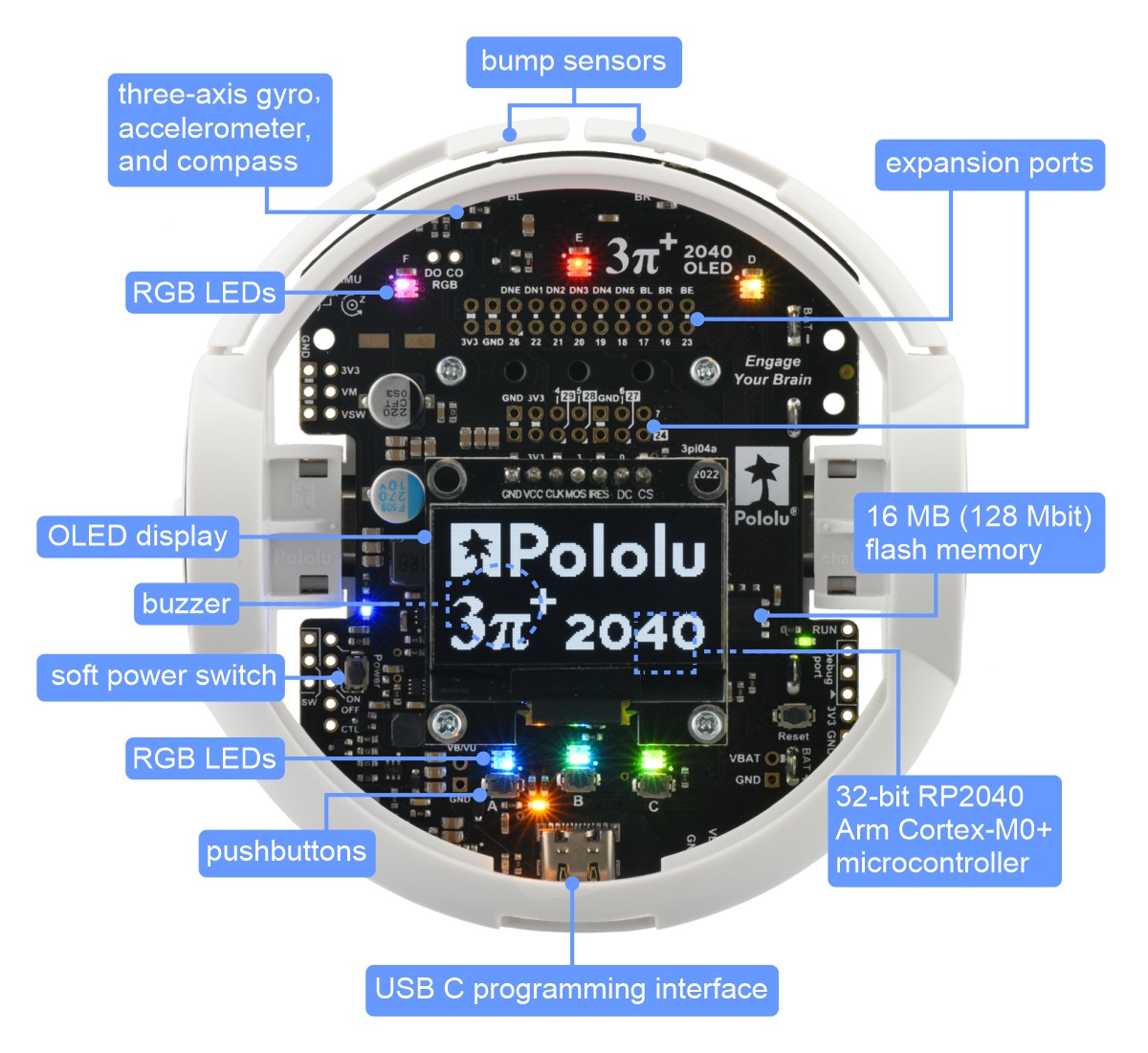 |
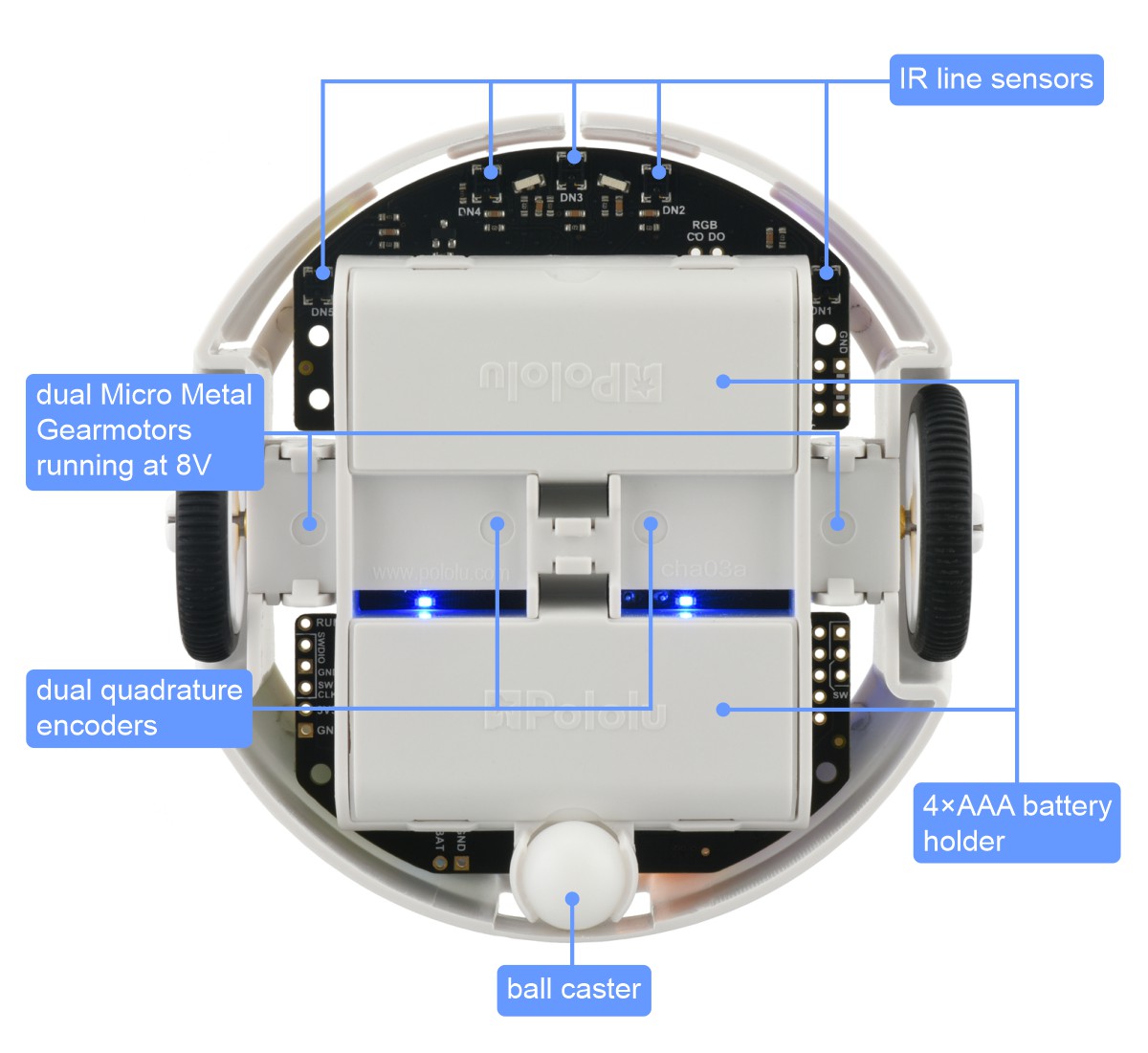 |
We have a comprehensive set of example Python programs to help get you started using all of these features, and we expect to continue adding more over time. Let us know if there’s something in particular you would want to see that is not already covered!
|
|

Related products





New Products: U3V16Fx Step-Up Voltage Regulators
|
|
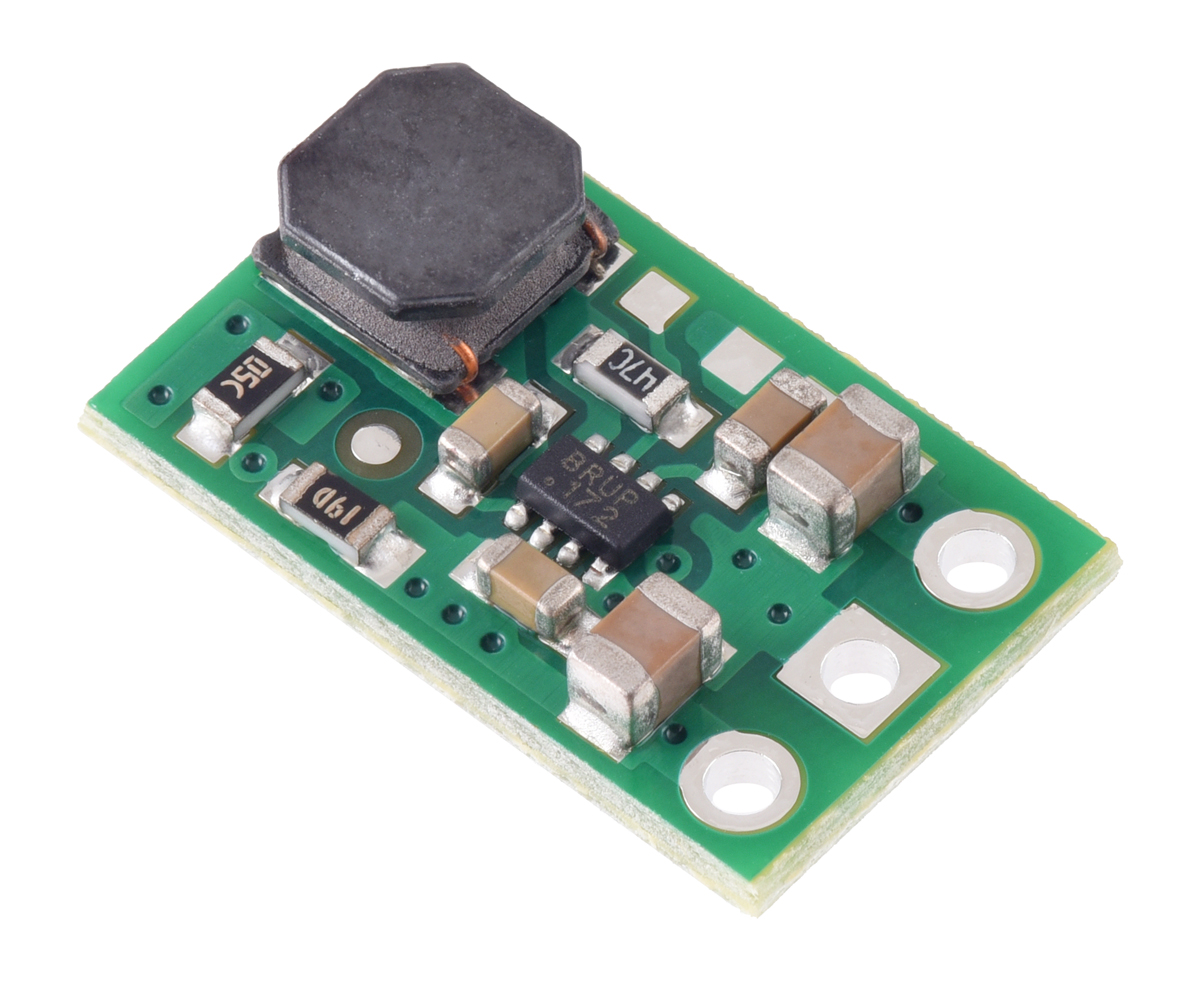
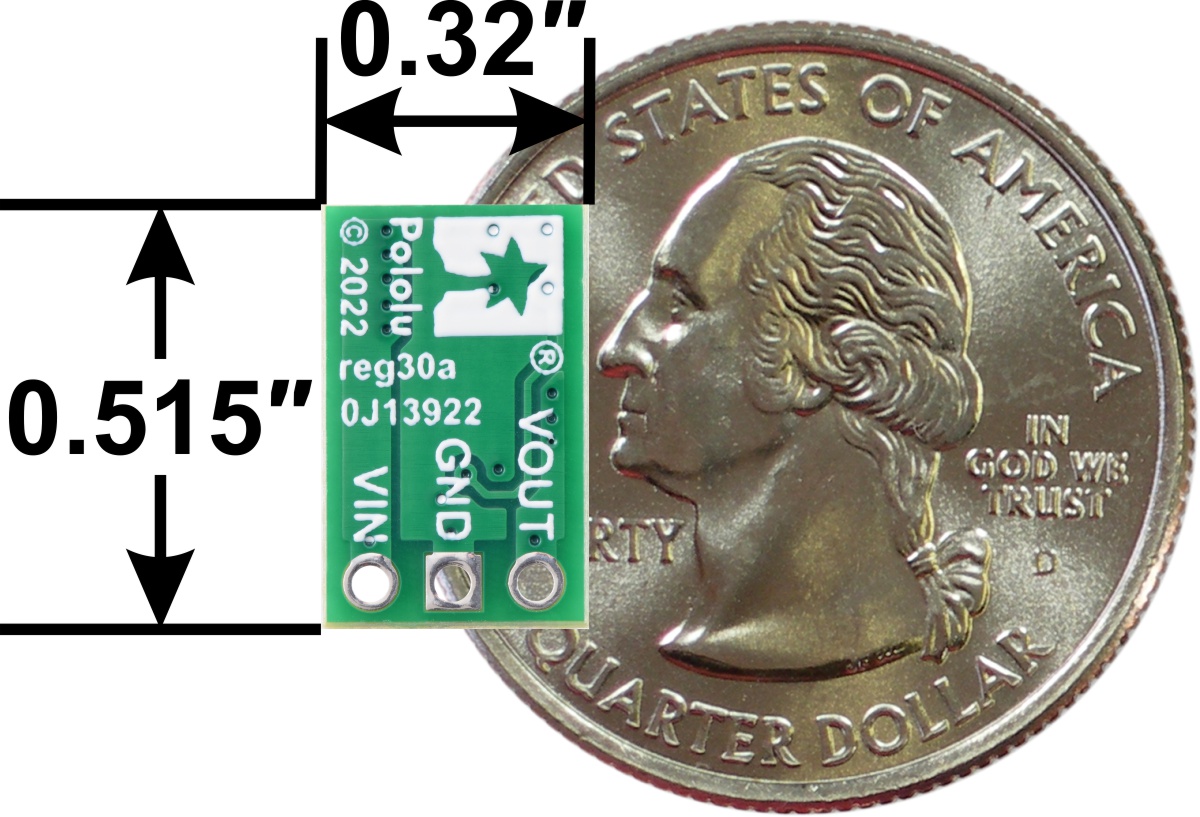
We are excited to introduce our new compact and efficient U3V16Fx family of boost voltage regulators, which can generate higher voltages from input voltages as low as 1.3 V (the minimum startup voltage is 2.7 V, but they will operate down to 1.3 V after that). It’s awesome how much power these deliver in such a tiny package! It’s a little difficult to quickly convey the power or current capabilities of boost converters, since the output power is limited by the input current (which can be up to 2 A with this new family), but we usually care about the output current, which is inversely proportional to the ratio by which you are boosting the voltage. For instance, if you are tripling your voltage from 3 V to 9 V, the maximum possible output current would be one third of that 2 A maximum input (assuming 100% efficiency). Continuous currents will be a little lower than peaks, and once you factor in real world efficiency (typically 80-95%), you can expect these kinds of maximum currents:
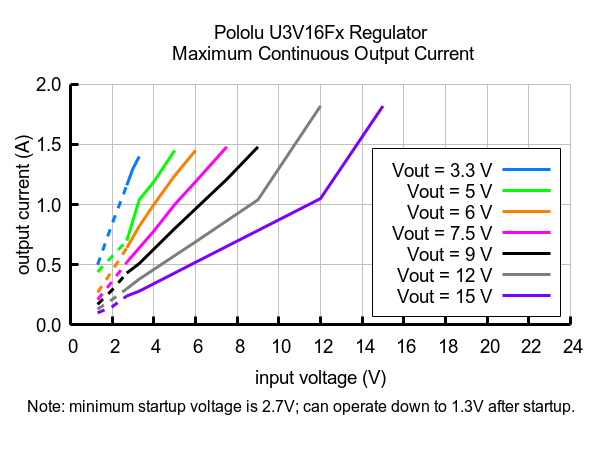 |
Efficiency is also a bit hard to capture without a ton of graphs, but here’s an example from the 12 V version:
 |
Typical efficiency of 12V Step-Up Voltage Regulator U3V16F12. |
|---|
 |
The U3V16x family includes seven versions with fixed output voltages ranging from 3.3 V to 15 V:
- U3V16F3: Fixed 3.3V output
- U3V16F5: Fixed 5V output
- U3V16F6: Fixed 6V output
- U3V16F7: Fixed 7.5V output
- U3V16F9: Fixed 9V output
- U3V16F12: Fixed 12V output
- U3V16F15: Fixed 15V output
These new regulators are the same size as the popular U3V12Fx boost regulators, which we had to discontinue due to key components becoming obsolete, and they offer superior performance, so they should work as drop-in replacements for those older regulators in most applications.
Related products







New products: S13VxF5 step-up/step-down voltage regulators
 |
We have released three new members of the S13VxF5 regulator family:
- 1A Step-Up/Step-Down Voltage Regulator S13V10F5
- 1.5A Step-Up/Step-Down Voltage Regulator S13V15F5
- 2A Step-Up/Step-Down Voltage Regulator S13V20F5
These lower-current variations are much smaller than the existing 3A Step-Up/Step-Down Voltage Regulator S13V30F5, but they can handle continuous output currents of 1 A, 1.5 A, and 2 A, respectively, with efficiencies from 85% to 95%. Like the S13V30F5, these smaller units accept input voltages from 2.8V to 22V and feature under-voltage lockout, output over-voltage protection, and over-current protection as well as thermal shutdown and soft-start, but they do not have reverse voltage protection or a disable input.
Each member of the S13VxF5 family has a fixed 5V output, and the components are optimized for different current capabilities. With the S13V20F5 in particular, we are offering a variant with a much more expensive inductor to squeeze out the most power we can in the smallest package.
Related products
Performance graphs for our 25D Metal Gearmotors
|
|
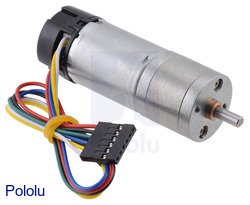
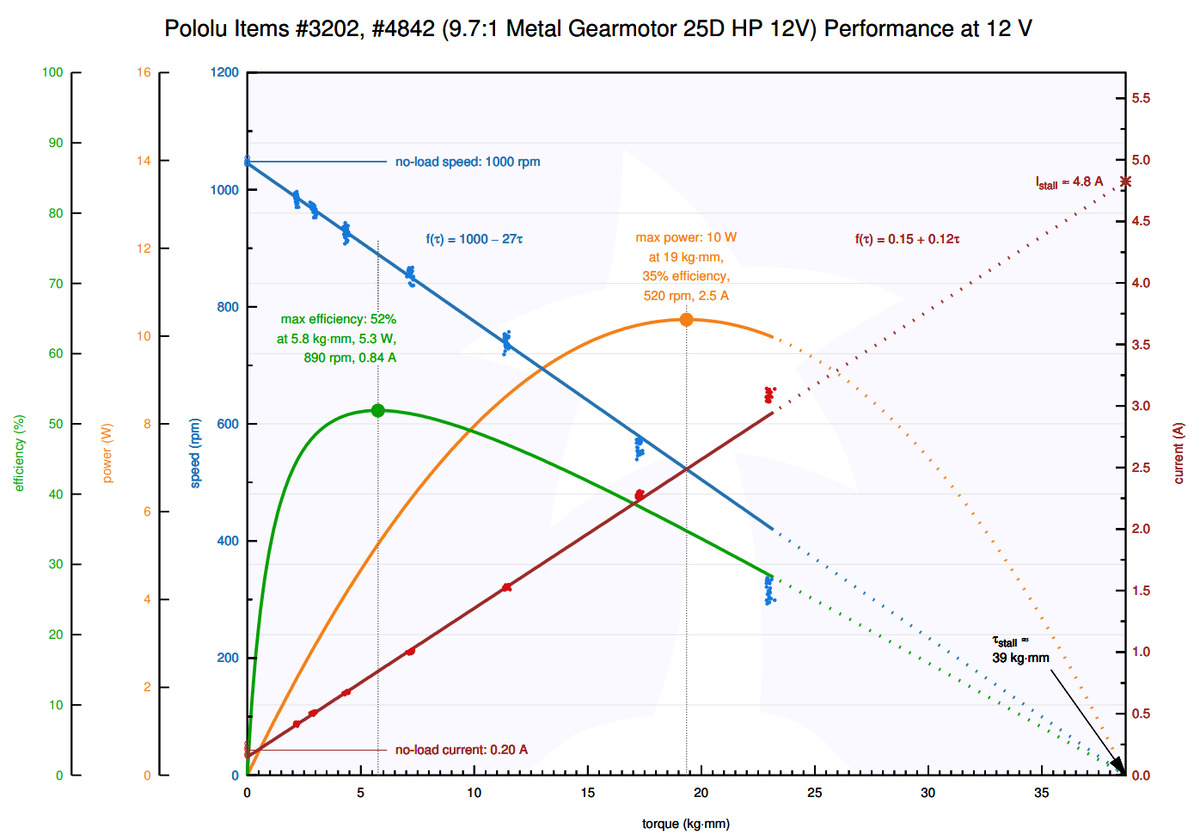
We have published performance graphs (2MB pdf) for our 25D Metal Gearmotors! Each chart is based on hundreds of individual measurements that reveal how the speed, current, power, and efficiency of that particular gearmotor version depend on the applied load (i.e. torque). Our test methodology is the same as the one we used to make our Micro Metal Gearmotor performance graphs, so you can see our blog post about that for more information.
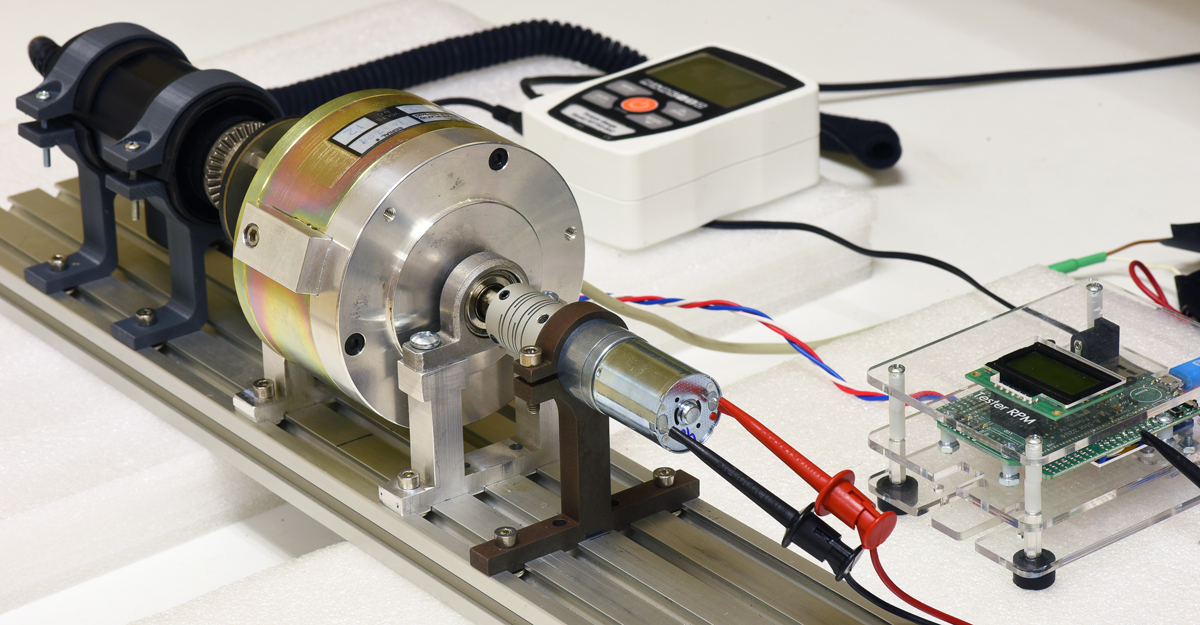 |
25D mm metal gearmotor undergoing dynamic performance testing. |
|---|
These characterizations are yet another way we set our gearmotors apart from the many similar-looking alternatives out there. When you get your gearmotors from us, you know what kind of performance to expect, and you can count on consistency from batch to batch.
If you have any questions or feedback about these graphs or if there is additional information you would like to see available for our motors, please feel free to contact us (or just leave a comment below).
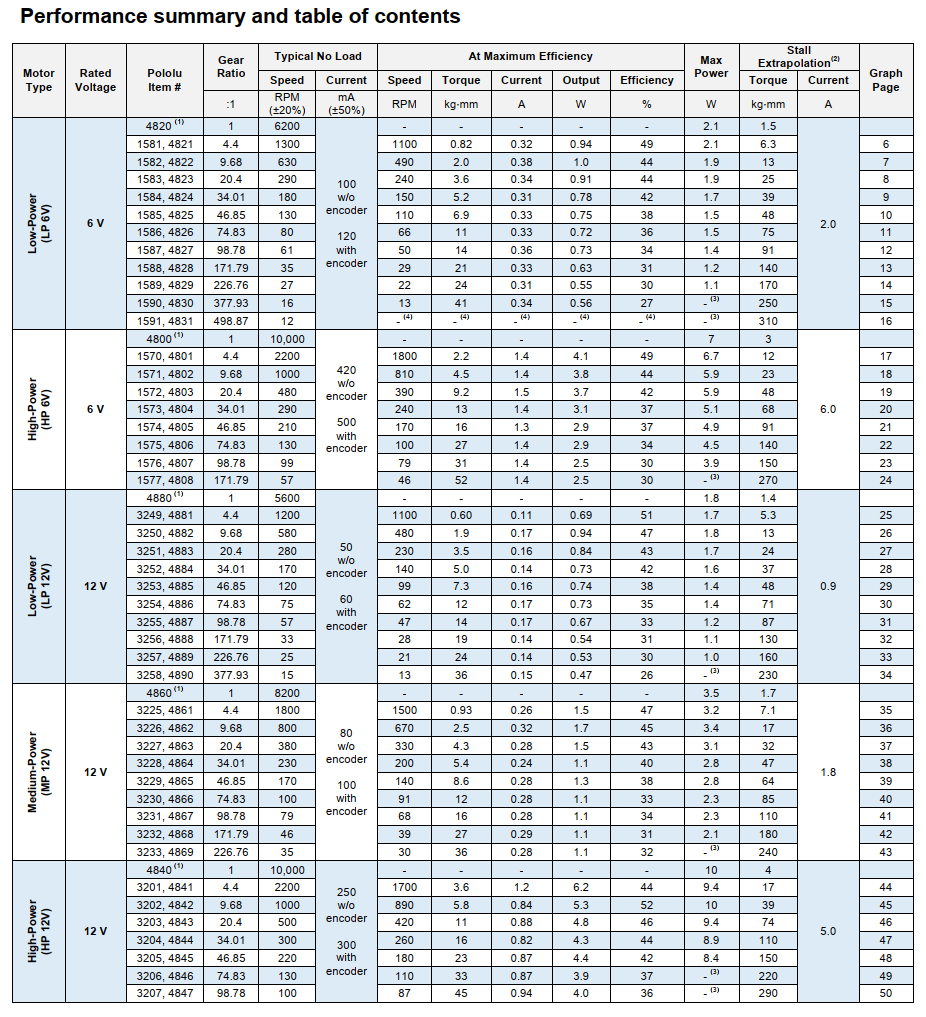 |
Performance summary table from 25D mm Metal Geamotor datasheet. |
|---|


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










