Pololu Blog »
Engage Your Brain
A blog by Pololu president Jan Malášek.
25 Years!
 |
Today is the 25th anniversary of shipping our first order! This post is a quick update about what has happened in the five years since I wrote our 20th-anniversary post. You can see more about our history in these two anniversary posts:

- Ten years in Las Vegas (Posted 5 June 2012)
- 20 years since we shipped the first Pololu product (Posted 9 April 2021)
The biggest milestone over the past five years was that we bought our building at the end of August 2021. That was such a pie-in-the-sky notion in early April 2021, when we were just a year into the pandemic and the general global outlook was very uncertain. However, that very uncertainty might have helped us, with interest rates extremely low and commercial real estate vacancies continuing to rise after the shutdowns and transitions to remote work over the previous year.
 |
Meeting with landlord on 27 April 2021. |
|---|
We had extended our lease for five years (plus some extension options) in 2018 with our long-time landlord, but he had to sell the building somewhat abruptly in 2019, giving us only six months of history with our new landlord when I went begging to him for relief right after the covid shutdowns started in March 2020. He did not help (he had dozens of tenants asking him the same thing), and he even left me with the impression that since I had a very good rental rate, I better be careful not to give him any pretext for evicting us. We hung in there for the next year, and the next time I went begging to him, in late April 2021, it was to pleeeeeease sell us the building: his ownership group has buildings all over Vegas and in several other states, while my whole life is invested in this company that is in turn very dependent on this building; with interest rates where they are now, our monthly mortgage payments would be lower than the rent we were paying!
I think he was skeptical we could get a loan, but fortunately, we were able to make a deal contingent on that loan, and then we were able to find a bank willing to lend us the money. And so the building became “ours” at the end of August 2021. “Ours” in the sense that we owed 90% of the value to the SBA and bank, but as long as we didn’t mess up, it would become more and more ours over time.
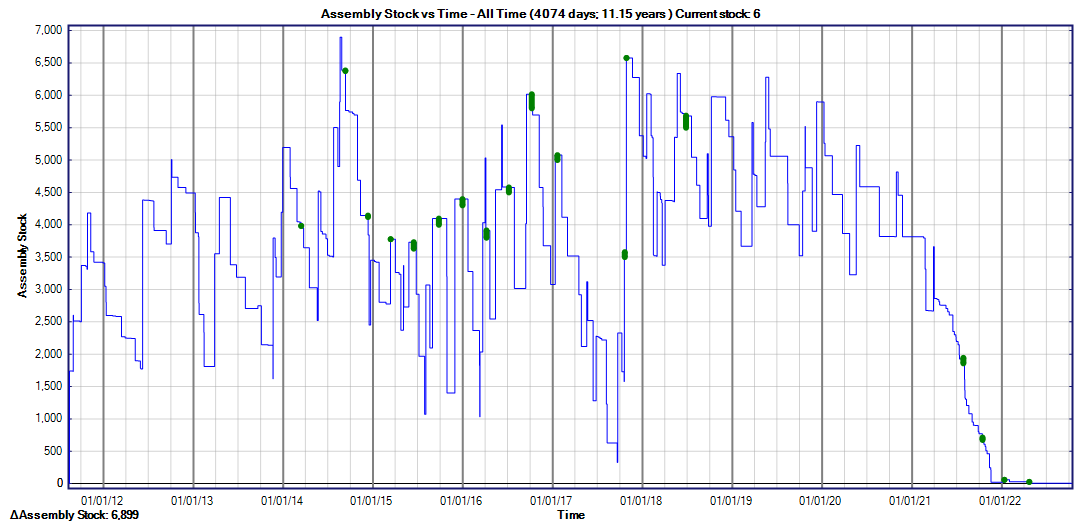 |
Inventory history for a component we ran out of during 2021-2022 chip shortage. |
|---|
The covid situation continued to improve, and now it’s mostly a distant memory, but since then we have had multiple new challenges to just keeping the business going. The biggest were the chip shortages as we came out of the pandemic, where in some cases we had to wait over two years to get parts (for example, a part I ordered in April 2021 did not get delivered until January 2024). Even with our very large inventory, that led to being completely out of key components for over a year in the worst cases. We had a big slowdown in 2024 as we were hit by the repercussions of having been out of stock on some products for an extended time and probably from some larger customers having stocked up a lot in 2022 and 2023. And as things were finally getting back to normal in 2025, we had the yugely disruptive new tariffs come into effect.
 |
Ceiling light (and/or HVAC system) replacement. |
|---|
We had done some renovations to the building in 2018-2019, but we had otherwise taken the space as-is at the end of 2011 after it had been vacant for a few years. Once the building was ours, we spent 2022 and 2023 gradually improving it, including replacing almost two dozen HVAC systems and changing over to LED lighting. The biggest project was the installation of a 305kW solar array on the roof, which I covered in a series of blog posts in late 2024:
 |
Solar panels on Pololu’s roof. |
|---|
- Part 1: Introduction and project overview starting from late 2022.
- Part 2: Installation from January 2023 through first day of operation on October 5, 2023.
- Part 3: System failures and production results during the first year of operation.
- Part 4: Analysis of electrical costs before and after our system was installed.
- Part 5: Actual system cost after tax credits and conclusion as of November 2024.
I am happy to report that we had a much better experience the second year of operation, with no major issues and over 531 MWh generated in 2025, as reported by the SolarEdge monitoring system:
 |
Pololu lifetime solar energy production as of 8 April 2026, showing 531 MWh generated in 2025. |
|---|
Here’s a monthly breakdown and comparison over the years:
 |
Pololu monthly solar energy production 5 October 2023 through 8 April 8 2026. |
|---|
It’s hard to know for sure where SolarEdge measures that generation, but once a month I can see the power company’s assessment of the situation when we get our billing statement. There are of course fluctuations as the weather changes, but the best result we got so far was for the year from August 21, 2024 through August 20, 2025, where integrating all of the charges and credits from NV Energy’s side, we used a net of 2,582 kWh. Dividing that by the 531,390 kWh generated in 2025, we generated over 99.5% of our total annual energy consumption!
 |
Jan and Paul juggling, 6 April 2001. |
|---|
I am writing so much about the building not only because a lot has happened around it in the past five years but because it has such long-term strategic relevance to Pololu’s stability and continuing to operate and grow as a manufacturer for the next 25 years. We moved or expanded almost a dozen times by the time we got to this building, but we have been at this location for almost 15 years now. Over the years and depending on where we were in our lease renewal cycle, this building has alternated between a prison and a refuge to me. It has always been bigger than what we needed, but if we were going to be committed here for many years, I wanted to make sure we had room for growth. As we got more invested in the building, with more installed equipment and procedures around how things were laid out, we also became more vulnerable to potentially losing the space. I don’t know if it’s true for sure, but I heard of long-time juggling equipment maker Dubé going out of business because of not being able to renew the lease on their location (in New York City).
Moving from a lease to a mortgage should give us much more long-term security, but it was not without its downsides. The biggest one is that we are now under more obligations to the banks than we were to the landlord, with the biggest requirement that we maintain a certain level of profitability. Especially when business gets slower, as it did for us in 2024, that becomes a big disincentive toward longer-term and riskier development projects. The pressure to maintain profitability and the difficulty in obtaining components has led to most of Pololu’s new products being simpler over the past several years. Now, with the 5-year anniversary of the building purchase coming up in less than five months, we face some uncertainty of what our interest rate will reset to (and we will also divert some energy and attention to refinancing for better terms now that we are in a better situation than we were five years ago).
The main nice thing with owning our building, even with the caveat that a bank could take it back if we fail to meet our obligations, is that every month and year we survive, the situation should be improving, as opposed to being a month closer to the unknown of a lease renegotiation. There are about 60 of us working here now, compared to the 80 at the beginning of 2020. We have lots of room to grow, but if things slow down, we can also continue operating at our reduced scale without rising real estate costs forcing us out of business.
 |
Pololu building site aerial pictures—spring 2000, left, and spring 2001, right. |
|---|
One last note on the building: in going through old county aerial photos, I saw just dirt in the spring 2000 picture and the building with cars parked around it in the spring 2001 picture, which means the building is the same age as Pololu! It was built for a public company that went bankrupt in the 2008 recession, and we have occupied the building twice as long as the original company that built it.
 |
Me and my dad, 30 May 2000. |
|---|
25 years is interesting emotionally and psychologically, as a lot can change in the five years from 20 years. After 20 years of building the company, I could still realistically think I was less than halfway done. That’s a lot less true now, as 25 more years would make me over 70 years old and close to the age my dad was when he died, which happened abruptly in May 2021. Several others at Pololu have also lost parents in the past few years.
 |
Pololu building renovation inspection, 27 April 2019. This guy is taller than me now. |
|---|
Our kids are also growing up. We five owners of Pololu have ten children among us, and with the oldest about to head off to college and nearing the age we were when we started the company, it also means we have been splitting our energy between parenting and building the company for the majority of the past 25 years. Having kids and building a company each takes a huge amount of time and effort, and each of those major life projects puts substantial limitations on the other. As our kids become less dependent on us, we should be able to put more into the company again.
I continue to be grateful to all of our customers. Thank you for your support and business over the past quarter century! Thank you also to all of the Pololu employees who work hard every day to make the world a better place. In the 20th-anniversary post, I highlighted several employees who had been with us for ten years or more; most of them are still here, which means they have now been at Pololu for 15 years or more. I am blessed to have found such great people early in my life and to be surrounded by my favorite people every day. Thank you all and here’s to the next 25 years!
New products: D24V7Fx 36V, 600mA low-cost step-down voltage regulators
|
|
|



We just released our D24V7Fx step-down voltage regulator family of basic buck regulators, which generate lower voltages from input voltages as high as 36 V while supporting maximum continuous output currents of 600 mA across all combinations of input and output voltages. Because they are switching regulators, they are much more efficient than linear voltage regulators, especially when the difference between the input and output voltage is large. This family includes six versions with fixed output voltages ranging from 3.3 V to 12 V:
| Regulator | Output voltage | Max continuous output current |
Input voltage range1 | Size | Special features | Price |
|---|---|---|---|---|---|---|
| #5592: D24V7F3 | 3.3 V | 600 mA | 4 V – 36 V | 0.34″ × 0.54″ | Short-circuit protection, thermal shutdown |
$2.75 |
| #5593: D24V7F5 | 5 V | 5.1 V – 36 V | ||||
| #5594: D24V7F6 | 6 V | 6.1 V – 36 V | ||||
| #5595: D24V7F7 | 7.5 V | 7.6 V – 36 V | ||||
| #5596: D24V7F9 | 9 V | 9.2 V – 36 V | ||||
| #5597: D24V7F12 | 12 V | 12.2 V – 36 V | ||||
| Note 1: Minimum input voltage is subject to dropout voltage considerations; see the dropout voltage section of product pages for more information. | ||||||
We manufacture these boards in-house at our Las Vegas facility, so if one of the stock voltages doesn’t fit your needs, we can customize these regulators to output other voltages. If you are interested in customization, please contact us for a quote.
 |
The main distinguishing feature of this regulator is its small size and low cost. At just $2.75 in single-unit quantities, it is our lowest-price regulator yet! We were able to achieve this by having one of our high school summer interns do the board design:
 |
High-school summer intern routing the D24V7Fx regulator PCB, July 2025. |
|---|
I’m kidding about that making the price lower, of course. Our engineers still went over everything, and unlike some competing products you might encounter, we provide detailed performance data such as the quiescent current characteristics:
 |
Also, each production unit is fully automatically optically inspected and tested. We have been putting a lot of effort into automating our testing and packaging, and that is the real key to being able to offer these low prices. More behind-the-scenes information on the robots making our products coming soon!
Introductory special discount! Use coupon code D24V7FXINTRO to try out these new regulators for just $2.22 each.
Related products






April 12, 2025 tariff update and new price change notification feature
As a small US-based electronics manufacturer, we have been contemplating tariffs a lot this year, especially over the last several weeks, when our mindset changed from primarily “let’s see what happens” to more of “this could be an existential threat and we need to act right away.” Like much of the world, we were shocked by the April 2 announcement of new, and high, US tariffs on seemingly everything from everywhere and the subsequent dramatic escalation of tariffs on China, which are up to 145%, or maybe 170% or 195% on some electronics components, as I write this on Saturday, April 12.
With the various pauses and extensions and exemptions that are announced almost daily, it might seem that the tariffs are just talk, but we have been getting hit by tariffs of 45-70% on electronics components for the past several months already. Often, these are for integrated circuits that we ordered months ago and that can ship from various countries, and we find out about the extra 70% cost only after we receive the parts. This summary from a recent Arrow Electronics order for some stepper motor driver ICs shows Arrow trying to get ahead of the tariff shocks and how high their estimate had gotten (I am not sure how they are calculating it, and it probably also changes day to day):
 |
Order summary from an April 6 stepper motor driver chip order showing estimated tariff of 144%. |
|---|
We just finally mostly recovered from the pandemic-era chip shortages, and we don’t want to wait too long on reacting as we did then, when some of our key stock was quickly bought up and left us unable to manufacture some products for nearly two years. So, over the past week, we have gone through and assessed the pricing of all of the thousands of products we sell. Since most products have various quantity price breaks and pricing for our distributors, we updated tens of thousands of prices.
Our system is not made for this. When we release products, it’s usually one at a time and we carefully assess our costs and competing products to set what we expect to be good prices. If there are small cost increases over time, we usually absorb them, and if there is a big jump in some component cost, we can reassess and reprice the affected products individually. But here, we are dealing with the sudden, not precisely-specified, and unequal cost change of almost every component. So, the price changes that we have made over the past week have been much less carefully considered and more dependent on formulas based on costs and countries of origin and other data we have available.
Many of the “individual assessments” amounted to looking at prices our programs spit out and seeing if they seemed reasonable, and in many cases we just flagged the item for further review later and accepted the proposed prices or overrode to stick with our old prices. And, in some cases, we had to override to make the prices higher still based on knowing that a particular part was already constrained or getting higher tariffs.
This morning (again, Saturday, April 12) as I started writing this post, I saw news reports that semiconductor devices would be exempted from the latest extra hikes. Even if that applies to the kinds of integrated circuits we use, I think that means the 70% portion that we have already been paying is still staying in place. It’s also not clear to me if things like inductors, which we’re currently paying an extra 45% on are going to stay at 45% or going to 170% or what (basically all commodity inductors in the world come from China as far as I know). Even if they do get some exemptions or the tariffs are walked back more broadly, I suspect the 45% increase will be a new minimum for a while.
These new exemptions announced today should be good news for us, but I find myself feeling deflated as I contemplate more and more effort having to go into constantly repricing everything while looking at bills for extra thousands of dollars in tariffs almost daily. (This post is mostly about the work going into pricing for our customers, but there is also lots of decision making about what to buy now, such as do we get extra material now before prices go up more, or do we hold out hoping for them to go down and risk running out of components? Will the demand still be there for a product if it’s more expensive? And so on.)
Anyway, the point of this post is not to whine or wallow or complain, but rather to give our customers and partners some idea of how we are dealing with the tariffs. Price increases are not pleasant, and we are working on keeping them to a minimum and reducing prices again when we can. We are also quickly developing a new price change notification feature on our website so that you can be notified of price changes on any products you care about:
 |
New price change notification feature. |
|---|
Because things are changing so quickly, we are rolling out this new website feature and I am announcing it before we have the notification email system implemented, so it might be a while before we can start sending out the notifications. I am thinking that until we have it all working and until things stabilize, this can also be a way for us to get feedback about which products might have been badly repriced and that we should prioritize for reassessment.
Please reach out and share your thoughts in the older established ways, too. Especially if you are a customer wondering about the future of some product, please let us know your concerns and we will do our best to give you whatever insight we might have and work with you on prices.
How much did our 305 kW solar plant cost, and was it worth it?

This is the fifth post in a series documenting the installation and first year of operation of Pololu’s 305 kW solar array. Here are the previous posts:
- Part 1: Background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: Installation from January 2023 through first day of operation on October 5, 2023.
- Part 3: System failures and production results during the first year of operation.
- Part 4: Analysis of electrical costs before and after our system was installed.
In this final post in the series, I will go over the costs and benefits of our solar system, some lessons learned, and my thoughts on whether this has all been worth it. Continued…
Energy costs after a year of operating Pololu's 305 kW solar project

This is the fourth post in a series documenting the installation and first year of operation of Pololu’s 305 kW solar array. Here are the previous posts:
- Part 1: background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: installation from January 2023 through first day of operation on October 5, 2023.
- Part 3: System failures and production results during the first year of operation.
In this post, we will look at how our solar installation affected our electricity bills. Because operations were so dramatically altered by the pandemic starting in 2020, we have to go back to 2019 for the best baseline for electricity consumption and cost. To maximize the scientific rigor of our observations, we changed as many variables as possible since then, including: Continued…
New products: compact reverse voltage protection and ideal diodes
 |
We just released several small reverse voltage protection and ideal diode boards that can protect your projects from reverse voltage application. We have reverse-voltage protection built into many of our products, and we usually implement it using a P-channel MOSFET, like this:
 |
Reverse-voltage protection using a P-channel MOSFET. |
|---|
This approach is usually more efficient than just using a diode since the MOSFET has a lower voltage drop across it. However, P-channel MOSFETs have worse on-resistances than N-channel MOSFETs of similar prices and sizes. This has not mattered much for our lower-powered products, but that limitation is becoming more apparent as we are developing more products with maximum operating voltages over 40 V. The next common MOSFET voltage above 40 V is 60 V, and at that voltage and with currents above around 10 A, it starts becoming more size-efficient to use an N-channel MOSFET plus an extra chip to manage the additional complexities of controlling the N-channel MOSFET in this kind of application. This is how that circuit looks:
 |
Schematic diagram of the 60V Pololu Reverse Voltage Protectors (green PCBs). |
|---|
Since we are planning on using this approach on several new products, we decided to make standalone product versions as well. Here are how the first products look, using 3×3 mm MOSFETs:
 |
This lets us get up to about 10-12 amps continuous current and an operating range of 4-60 V, which is perfect for most of our products. We tried to make the board as small as possible, and for the input and output connections we are using a new slot approach that lets the boards work with standard 0.1" headers or connectors, 3.5 mm connectors, and 5 mm connectors.
 |
Examples of various connectors that can be used with the Pololu 10A/12A Reverse Voltage Protectors (from left to right: 5mm terminal blocks, 3.5mm terminal blocks, 0.1″ headers). |
|---|
Texas Instruments offers two similar parts for the MOSFET controller. The LM74500 offers the same functionality as the simple P-channel MOSFET, allowing current to flow in both directions as long as the polarity is correct. This is useful for applications such as motor drivers where we want power to be able to flow back from the motor into the battery. There is also the LM74700 version, which makes the circuit function as an ideal diode, allowing current to flow in only one direction. We are offering our boards with both controller options and with two MOSFET options, for a total of four product versions:
| Pololu Item # |
Max current |
On resistance | Reverse current blocking |
Price |
|---|---|---|---|---|
| #5380 | 10 A | < 10 mΩ | no | $1.49 |
| #5381 | 12 A | < 5 mΩ | $1.95 | |
| #5382 | 10 A | < 10 mΩ | yes (ideal diode) | $1.75 |
| #5383 | 12 A | < 5 mΩ | $2.25 |
The datasheets for the LM74500-Q1 reverse voltage protection controller and LM74700-Q1 reverse voltage protection ideal diode controller provide additional information about adding a transient voltage suppressor (TVS) diode across the input as part of a more general input protection circuit. We have pads for an SMB-size TVS on the back side of the board for those interested in adding this kind of protection:
 |
As with our other electronics products, we make these at our Las Vegas, Nevada headquarters, so we can build custom versions with that TVS populated with a part of your choice (typical minimum quantities to make that worthwhile are around 200 pieces).
Are these interesting products? Would you want to see higher-current versions with bigger MOSFETs? Let us know in the comments or on our X and Facebook posts.
Introductory special discount! Try some out for as low as $1.16 each using our introductory special coupon, RVPINTRO (limit 5 per version)!
Related products




Notes and pictures from the 2024 ECEDHA Western Regional Meeting at UNLV

Over the last two days, I attended the 2024 Western Regional Meeting of ECEDHA, the Electrical and Computer Engineering Department Heads Association. It was held this year at UNLV, which is only 3 miles (5 km) away from Pololu, in the engineering department’s new Advanced Engineering Building that was just opened earlier this year.
 |
UNLV’s new Advanced Engineering Building, November 2024. |
|---|
I was there representing Pololu as one of five local industry sponsors. The larger companies there were treating it more like a recruiting event, and while we have several UNLV alums working at Pololu along with half a dozen student interns from UNLV, I looked at the event more as an opportunity to meet some of our customers. I also got to see some of UNLV’s new facilities for engineering students and researchers. Continued…
First year production results of Pololu's 305 kW solar panel array

This is the third post in a series detailing our experience over the past two years installing and operating a 305 kW array of 630 solar panels on our building in Las Vegas, Nevada. Here are the previous posts:
- Part 1: background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: installation from January 2023 through first day of operation on October 5, 2023.
I left off with our first look at the SolarEdge monitoring site on October 5, 2023. It’s nice to see nearly real-time generation results and status. The SolarEdge P1101 optimizers connect to pairs of solar panels, so that is the resolution we can see in the array. Here is a close-up as I write this at 10AM on October 31, 2024, with a section affected by the shadow from an air conditioner circled:
 |
SolarEdge monitoring site solar panel array close-up at 10AM on October 31, 2024. |
|---|
The 1.0.72 pair of panels and 1.0.19 pair of panels at around 130 Wh so far today have generated only about half as much as the nearby panels not affected by the shadows. Continued…
Installation of Pololu's 305 kW solar generation system

 |
This is the second post in a series detailing our experience over the past two years installing and operating a 305 kW rooftop solar system on our building in Las Vegas, Nevada. In the first post, I covered some of the background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023. This post covers how the actual installation went. Continued…
Pololu's 305kW solar generation system: Was it worth it?

October 2024 marked one year of operation of our 305 kW rooftop solar power generation system. In this series of posts, I will reflect on our installation and operation experience over the past two years to try to assess whether it was worth it. This first post covers some background leading up to the project and the overall system design. I will detail the installation process, the first full year of operation, and the production and financial results in subsequent posts. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










