Pololu Blog » Engage Your Brain »
Engage Your Brain (Page 2)
A blog by Pololu president Jan Malášek.
More Motoron motor controllers!
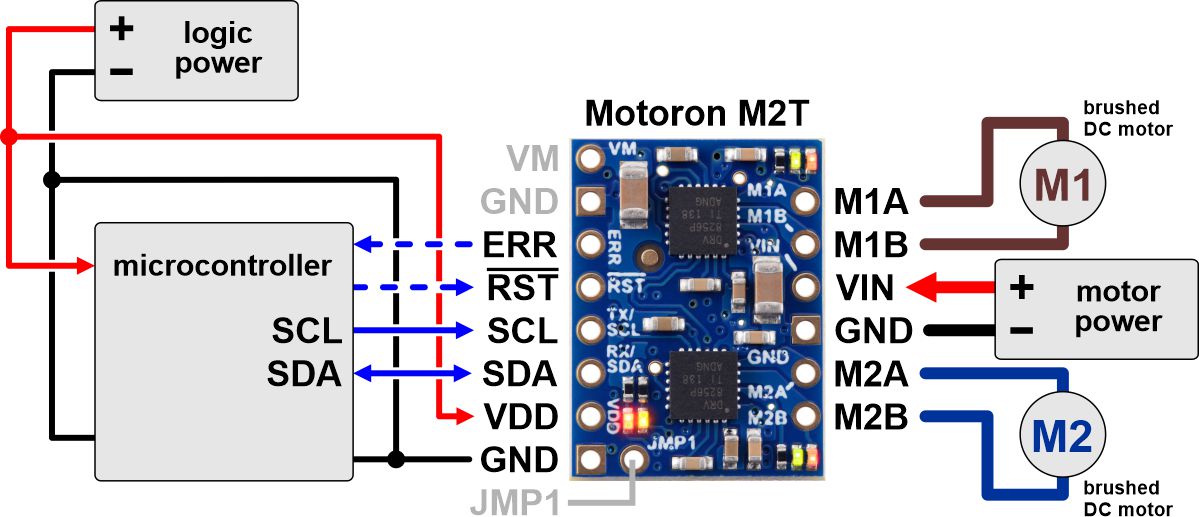 |
We recently added six new low-power variants to our Motoron line of basic serial motor controllers: four Mxx550 1- and 2-channel versions, as well as 3-channel versions for Arduino (M3S550) and Raspberry Pi (M3H550).
1- and 2-channel micro motor drivers
The new M1T550, M1U550, M2T550, and M2U550 are single- and dual-channel serial motor controllers in a micro footprint. With a maximum motor supply voltage of 22 V, the Mxx550 versions are a great way to control small motors powered by power supplies up to 12 V and battery packs up to 12 cells in series for alkaline, NiCd, and NiMH, or up to 4 cells in series for LiPo. These are lower-voltage, pin-compatible versions of the Mxx256 models we released earlier this year, which have a maximum motor voltage of 48 V and can deliver slightly more current but are otherwise almost identical.
Here is the full array of tiny Motoron options, including I²C and UART serial interface versions:
| Motoron motor controllers micro versions |
||||
 M1T550 M1U550 |
 M2T550 M2U550 |
 M1T256 M1U256 |
 M2T256 M2U256 |
|
|---|---|---|---|---|
| Control interface: | I²C or UART serial | |||
| Motor channels: | 1 (single) | 2 (dual) | 1 (single) | 2 (dual) |
| Minimum motor supply voltage: |
1.8 V | 4.5 V | ||
| Absolute max motor supply voltage: |
22 V | 48 V | ||
| Recommended max nominal battery voltage: |
16 V | 36 V | ||
| Max continuous current per channel: |
1.8 A | 1.6 A | 2.2 A | 1.8 A |
| Available versions with I²C: |
||||
| Available verions with UART serial: |
||||
| Price: | $12.49 – $14.49 | $15.95 – $17.95 | $16.95 – $18.95 | $23.95 – $25.95 |
3-channel motor drivers for Arduino and Raspberry Pi
We also released larger (but still small!), 3-channel versions in Arduino (M3S550) and Raspberry Pi (M3H550) compatible form factors. These again have a maximum motor supply voltage of 22 V and correspond to the 48 V max M3S256 and M3H256 versions we released in 2022. Here is the full line of larger Motoron serial motor controllers, including the even higher-power, dual-channel Motorons in full-size Arduino Shield or Raspberry Pi Hat form factors:
| Motoron motor controllers Arduino and Raspberry Pi form factor versions |
||||||
 M3S550  M3H550 |
 M3S256  M3H256 |
 M2S24v14  M2H24v14 |
 M2S24v16  M2H24v16 |
 M2S18v18  M2H18v18 |
 M2S18v20  M2H18v20 |
|
|---|---|---|---|---|---|---|
| Control interface: | I²C | |||||
| Motor channels: | 3 (triple) | 2 (dual) | ||||
| Minimum motor supply voltage: |
1.8 V | 4.5 V | 6.5 V | |||
| Absolute max motor supply voltage: |
22 V | 48 V | 40 V | 30 V | ||
| Recommended max nominal battery voltage: |
16 V | 36 V | 28 V | 18 V | ||
| Max continuous current per channel: |
1.7 A | 2 A | 14 A | 16 A | 18 A | 20 A |
| Available versions for Arduino: |
M3S550 | M3S256 | M2S24v14 | M2S24v16 | M2S18v18 | M2S18v20 |
| Available versions for Raspberry Pi: |
M3H550 | M3H256 | M2H24v14 | M2H24v16 | M2H18v18 | M2H18v20 |
| Price: | $20.95 – $30.95 | $34.95 – $44.95 | $59.95 – $69.95 | $115.95 – $124.95 | $59.95 – $69.96 | $95.95 – $104.95 |
The great thing about the Motorons is that you can easily string together or stack multiple controllers, mixing and matching sizes to fit your application. For example, you could use one high-power dual motor version for drive motors on a mobile robot and then add a smaller 3-channel motor controller for additional actuators. This arrangement with three stacked Motorons on an Arduino Uno allows simple control of up to 9 motors:
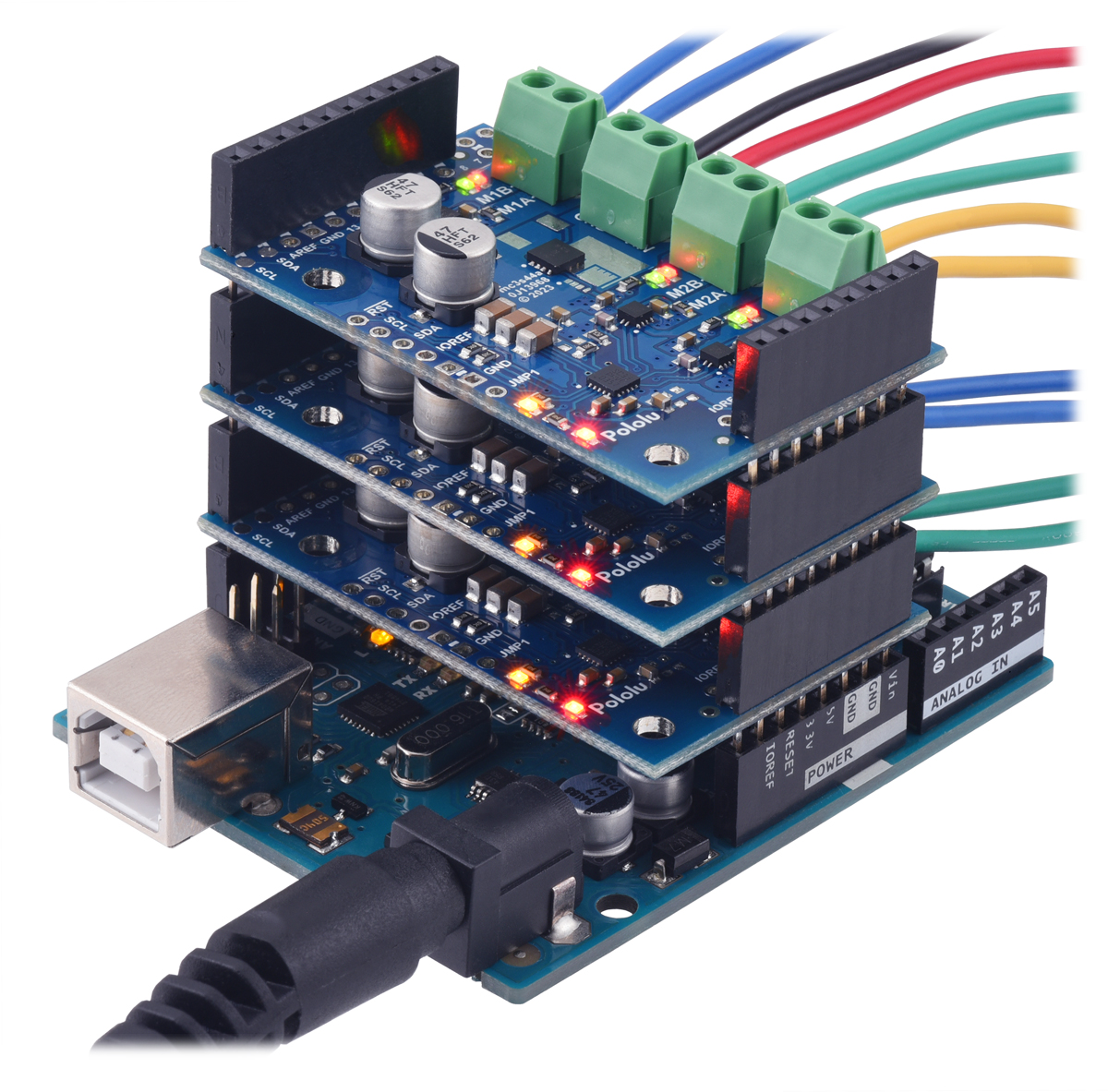 |
The common protocol between versions also makes it easy to change motor sizes and to reuse your code between projects. Want to make a bigger version of your first prototype? Just use a higher-power Motoron! Want to make a tiny robot next time? Use a tiny Motoron! Want to… you get the idea.
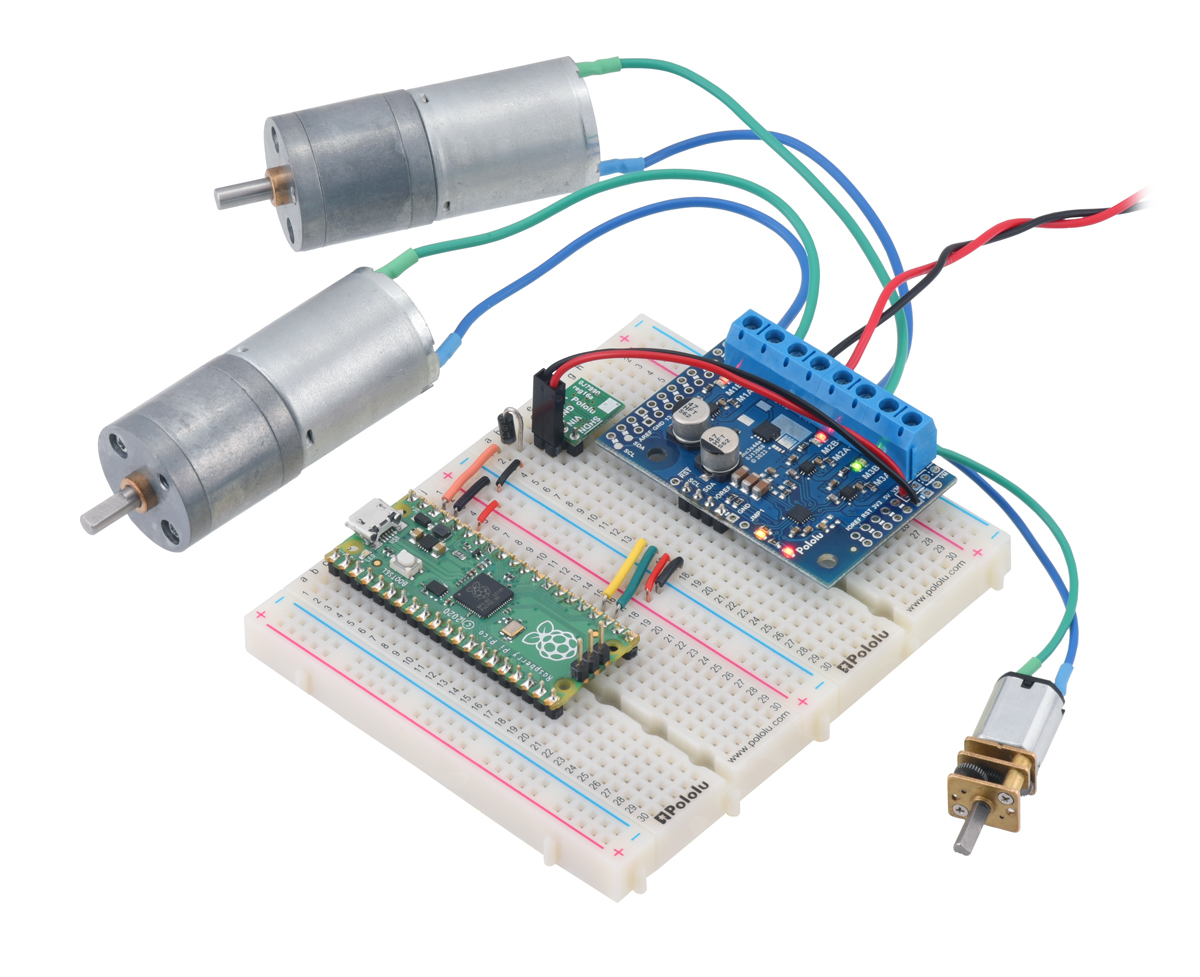
While the 3-channel boards are designed to stack on Arduinos or Raspberry Pis, they are also easy to use on breadboards:
 |
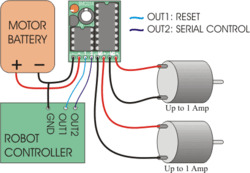
It may be easy to view the six new Mxx550 Motorons as just lower-voltage versions of the previously available Mxx256 Motorons, but I am especially excited about them because we are able to offer them at a very low price, extending the legacy of the Dual Serial Motor controllers that were among our first products over 20 years ago. We are launching the 2-channel M2T550 and M2U550 at just $15.95, a lower price than the original Dual Serial Motor controller from 2001 (without even adjusting for inflation!).
|
|

The chip shortages of the past several years have made it especially difficult to introduce new products and to keep their prices down, but things are finally seeming to get better on that front. You can see in the tables above that the higher-power 2-channel Motorons are much more expensive; those prices are still elevated because we are limited on some critical components we use there and in our other products. We should be able to manufacture plenty of the new Motorons without being constrained in a similar way.
Related products










Introducing the 3pi+ 2040 Robot

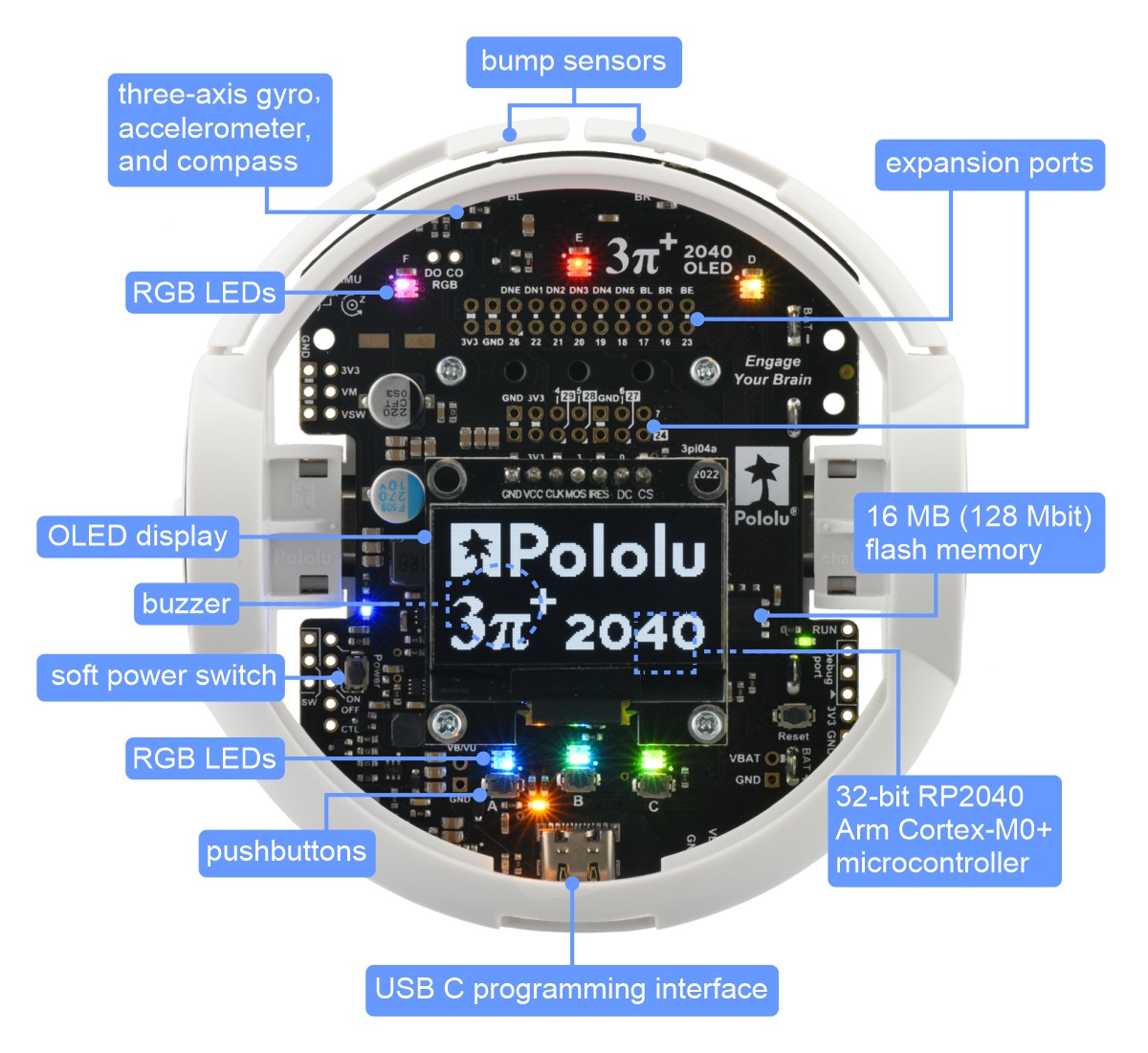
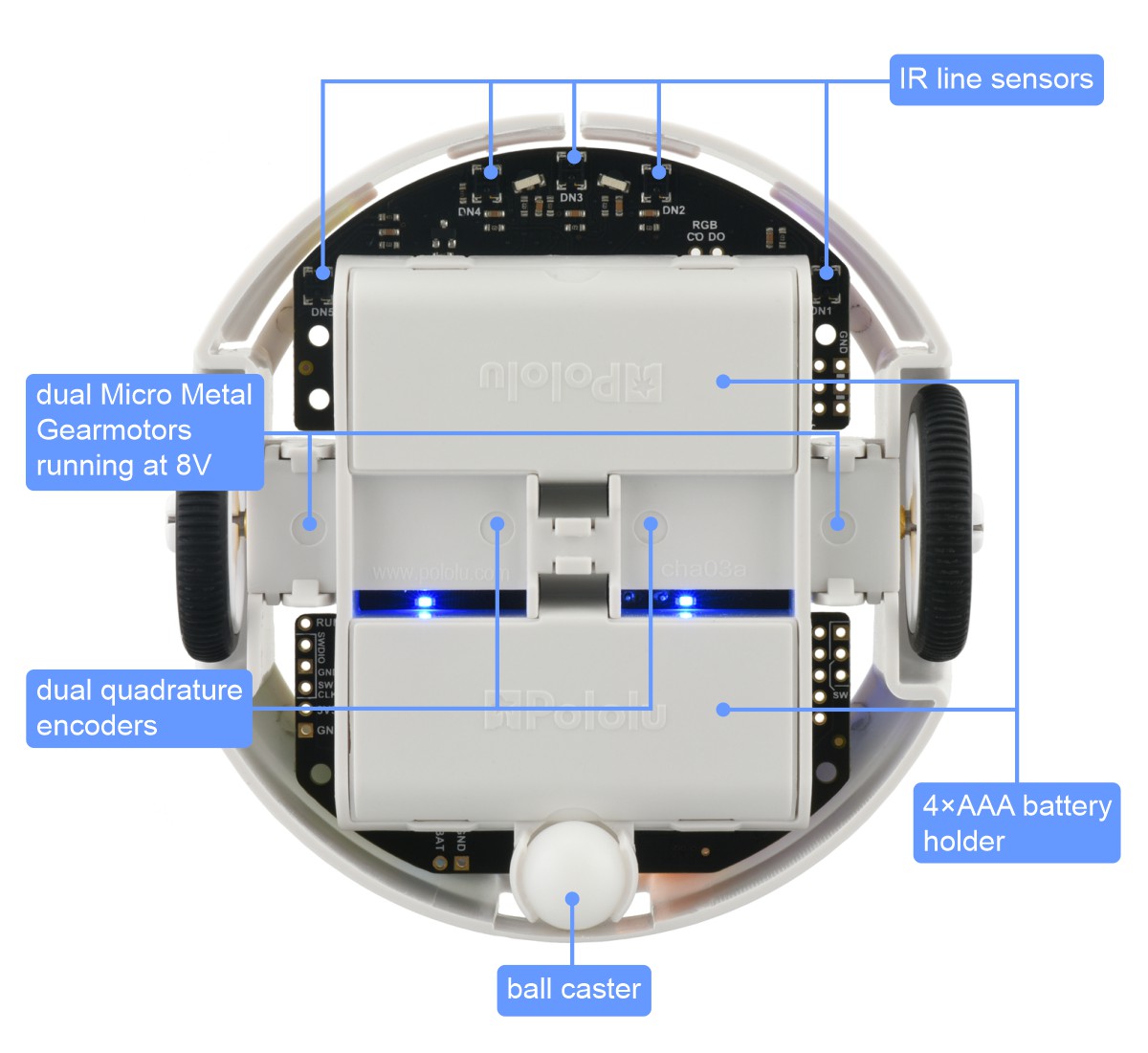
I am super excited to introduce our newest robot, the 3pi+ 2040. This robot combines the 3pi+ chassis, which we initially released in late 2020, with the power of the Raspberry Pi RP2040 microcontroller. Here is a quick overview of its features:
 |
 |
This summer will mark 15 years since we released our original 3pi robot, which was designed to be fast enough to be competitive in line following and maze solving events. The high speed offers interesting programming challenges not present in typical robot kits of that era; here is a video from back then in which Ben demonstrates his 3pi learning a maze and then going extra fast on longer straightaways:
Although we developed our first injection-molded parts (wheels, ball caster, and motor mounting brackets) for that design, it was still largely a “PCB on wheels” kind of robot. The next-generation 3pi+, with a chassis mechanically independent of any circuit board, had been in development for several years when the coronavirus pandemic hit in early 2020. We kept working on it throughout that year, culminating with the November release of the 3pi+ 32U4.
|
|
The 3pi+ delivered the most-requested feature missing from the 3pi, wheel encoders, along with many other improvements including a full IMU, bumpers, and programmability over USB (the 3pi required an external AVR programmer). With its support in the Arduino environment, the ATmega32U4 continues to offer a good entry point for working with microcontrollers, but the 8-bit architecture and 32 KB of program memory feel increasingly outdated and constraining, especially with the new sensors available on the 3pi+.
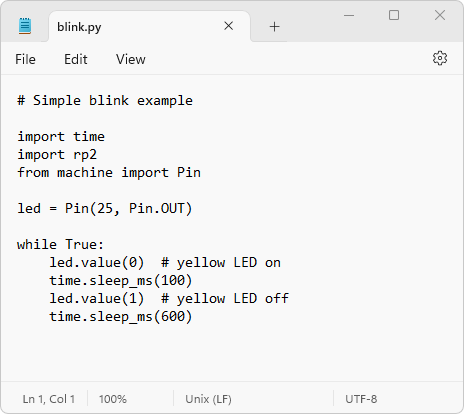
That brings us to the new 3pi+ 2040, powered by the Raspberry Pi RP2040 microcontroller (32-bit dual-core Arm Cortex-M0+) with 16 MB (128 Mbit) of flash memory. The robot ships preloaded with a MicroPython interpreter, so you can get started right away by plugging into its USB C port and editing the included example Python programs with your favorite text editor. No special programmers or programming software are required, and you can write MicroPython code from practically any desktop or mobile operating system as long as it has a text editor and the ability to copy files to a USB drive. For a basic Python IDE that lets you run code interactively, we are recommending the Mu editor. (See the User’s Guide for instructions on setting it up.)
|
|

There are many other programming environments and languages that you can use with the 3pi+. Since it shares the same RP2040 processor as the Raspberry Pi Pico, anything that works for the Pico should be usable on the 3pi+, including C, C++, and the Arduino environment. We already include some basic C examples in our example code repository, and we plan to write more examples and expand the software support for this robot. Do you have a favorite IDE that works with the Pico? Is there some language or system you’d like to run on the 3pi+?
 |
The menu of pre-installed demo programs on the 3pi+ 2040 Robot. |
|---|
Early adopter special: We are initially offering the 3pi+ 2040 Robot as a limited release intended for advanced customers who have had some experience with robotics or Raspberry Pi RP2040 programming (e.g. with a Raspberry Pi Pico). The initial release is available with 30:1 MP motors (the “Standard Edition”), either assembled for 38% off or in kit form for 50% off. Early adopter robots will generally need to be backordered as they are built to order; we expect to ship within a business day of ordering. The robot hardware is finalized so the only changes we expect for the full product release are in the initial firmware configuration and pre-installed example programs. Documentation will also continue to be developed as we release the robot to a wider customer base. Early adopters who publicly share their 3pi+ 2040 experiences will be eligible for an additional robot with an extra $25 discount.
Related products



October 2022: still waiting for parts…
 |
Wow, it’s been almost a year since my last update about how Pololu has been impacted by the global supply chain disruptions and chip shortages. And unfortunately, not much has improved. In today’s post, I will cover a few representative component stock histories and then go over other areas of our business that have been impacted and what we are doing to get through this situation.
Some parts on order since 2020 still have not shipped
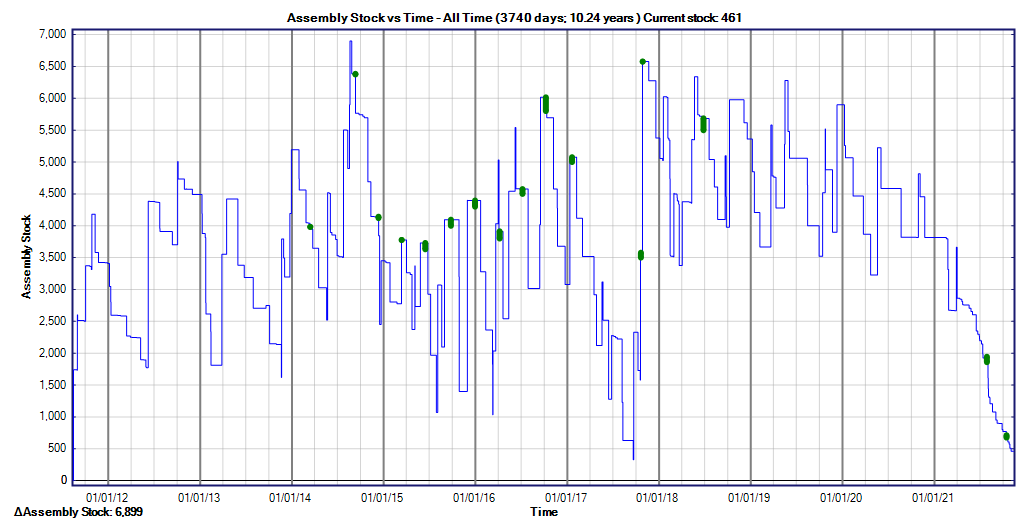
In the case of one important part I mentioned last year, we are still waiting for an order placed in late 2020 without having received anything since a partial shipment in March 2021! Here is what our internal stock chart looks like for that component:
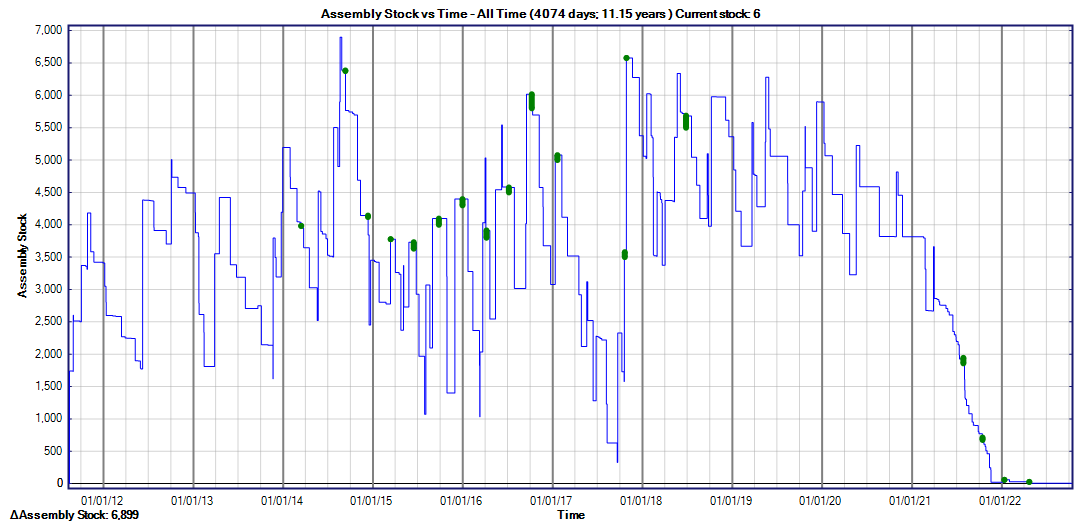 |
When I wrote about this component in November of 2021, we still had 461 units in stock, and the manufacturer was giving me specific updates about where we were in line and how I could expect parts by Q1 2022 or maybe even by the end of 2021. Well, we are now getting close to the end of 2022, and they are not even giving me updates anymore on when I can expect these parts that I ordered in 2020! We have gone almost a year without being able to make or sell the products that use that chip.
Some parts arrived in 2021 and early 2022, but we are out again
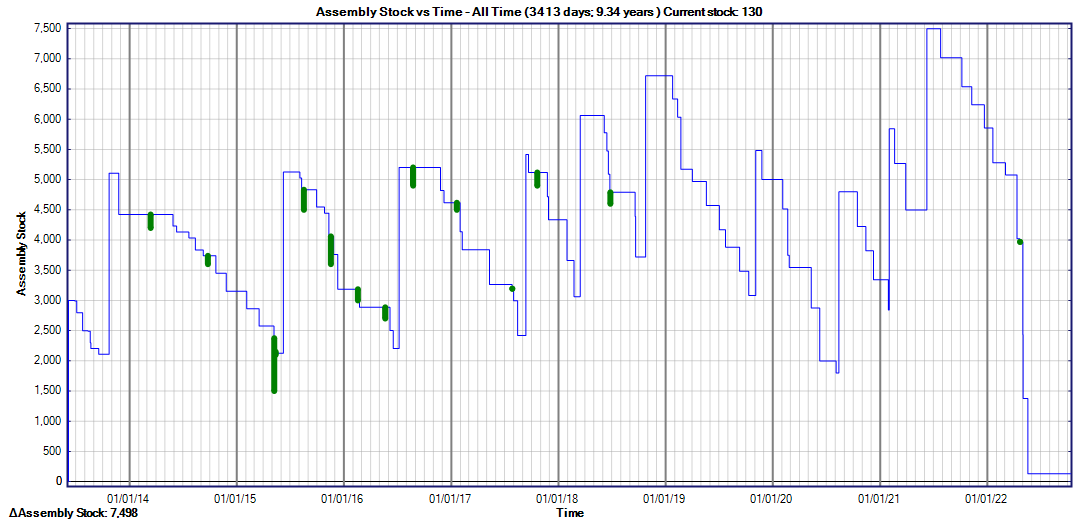
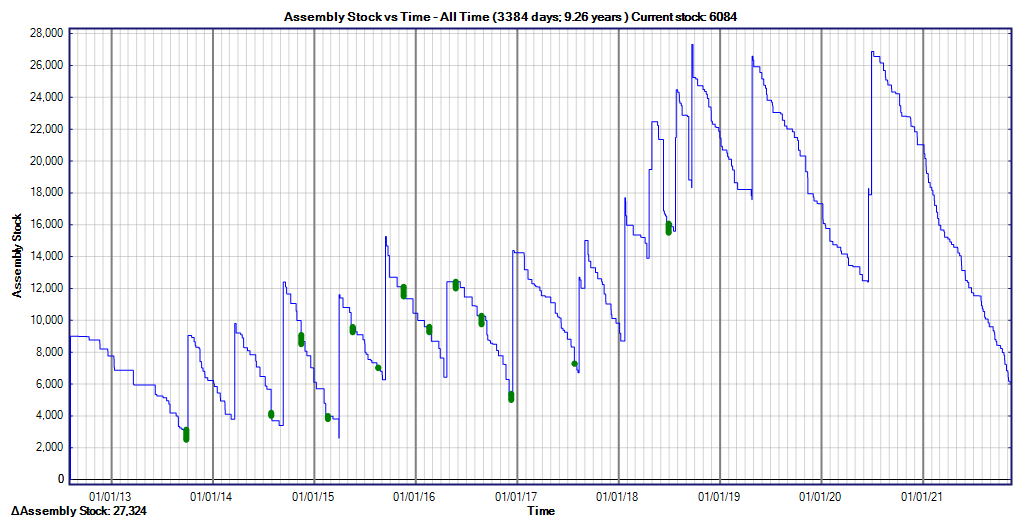
That first example of still waiting for an order from 2020 is not typical. Unfortunately, we are seeing more and more of this pattern:
 |
This is a component we ran out of over the summer of 2021, but we received some shipments in August of that year, and then more in early February of this year. But since then, nothing, and we are about to run out again despite our attempts to carefully ration the parts. It’s been over 14 months since I placed my oldest unfilled order for these parts, and the current expected ship date is February 2023.
Shifting demand clears out stock of alternative components
Another pattern we are seeing more of looks like this:
 |
Here, we were in a pretty good stock situation at the beginning of the year on a component we didn’t use that many of. However, as we raised prices on other products or ran out of stock completely, our customers moved to some of our recommended alternatives and cleared us out of those, and hence the sudden dropoff of those parts in April of this year. The additional problem with components like these is that we did not have as many on order because our historical usage was not that high, so it might take an extra long time to get that back to decent stock levels.
New “supply outlook” feature
We commonly use the same components in several different products. One of the main ways we are dealing with the shortages is to substantially reduce our inventory of completed products so that we can be sure the components we do have are going toward products that are getting sold immediately.
One big downside of reduced ready-to-sell inventory is that it’s difficult for customers to tell what is really, really unavailable because we’ve been out of parts for a year and what is actually available as soon as we make some more. To give you some automated guidance, we introduced a “supply outlook” feature to our website. Here is how that looks at the moment:
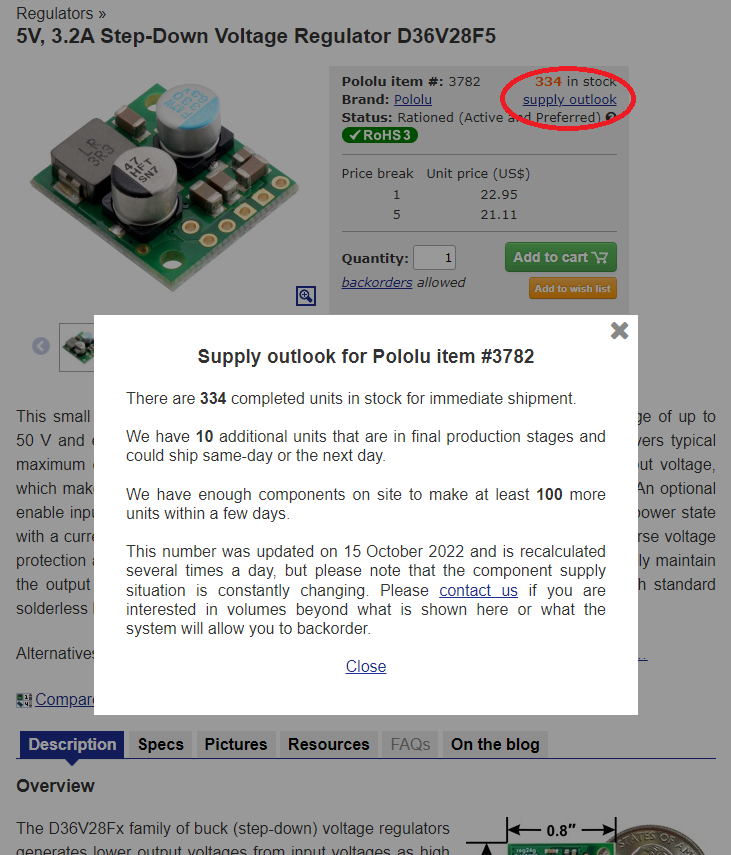 |
The calculations of what we can make are quite complicated given that we have thousands of different components going into thousands of different products, and the products (and the associated inventory) can be in various stages of production. Components stop being available once they are soldered onto a board, but that board might still go through many more processing steps before being ready and available for sale. The in stock and “in final production stages” quantities should be spot on, but we variously round down the “enough components” estimate to keep it conservative. The numbers can be outdated quickly since we are selling and making products all the time, but we regenerate those numbers several times a day to be as up-to-date as possible.
The supply outlook feature does not factor in components we have on order, though this year has proven that would be almost useless anyway (I’m not sure if I prefer the suppliers who give me no estimate of a ship date or those who have been saying “next week” for months). On our to-do list is to get more manual/human notes so that we can have updates like, “we are estimated to receive components in March 2024”.
I wish that last line was exaggeration. Unfortunately, I am getting more and more order confirmations with lead times of well over a year and estimated ship dates in late 2024. For parts I ordered early this year, we are approaching three-year lead time estimates for components.
Supply chain issues impact other aspects of business
Although the chip shortages are the most nerve-wracking aspect of the current environment, other aspects of our business are also affected by the supply chain problems, and it’s getting more and more uncomfortable.
- Waiting more than 9 months for commercial air conditioners - One literal example is the air conditioners in our building. We have over fifty of them, and dozens of them are over twenty years old, meaning they are inefficient and reaching the end of their useful lives. We have had several on order since the beginning of the year, and at this point we are hoping that maybe they will arrive by the end of this year. Fortunately, we made it through the summer, but several units did die recently, and it’s not clear that we can even have them replaced by next summer.
 |
Old ACs on Pololu building roof, waiting for replacement. Las Vegas Strip in the background. |
|---|
- Waiting more than 6 months for window film - We started applying special solar-blocking films to our windows to help reduce the energy use by the ACs. That project started in late spring, and although part of it got done over the summer, most of it has been delayed by at least six months waiting for more of the film to get manufactured.
 |
Pololu window tinting, July 2022. |
|---|
- 6-12 month lead time on compressors and nitrogen generators - We ordered a nitrogen-generation system earlier this year, and lead times on that are in the ballpark of a year as well. There are several components to the system and we get billed for them as they arrive, so I don’t think the manufacturer is holding back on any of them while waiting for the others. One component is a fairly standard (though nice) air compressor that I am expecting to use for the rest of manufacturing as our existing ones are getting kind of old. It’s scary to think some of our production or equipment could be out of commission for a year waiting for machines or components that normally are available within a few weeks.
Outlook
We have been very fortunate at Pololu because we have a broad range of products and do our own design and production, so we have been able to adjust what we make based on what components are available. I don’t understand how more small manufacturers are not going out of business, though I am anecdotally starting to hear more about companies facing financial difficulties. Contract manufacturers in particular have it tough when they have to pay for the components they can get while waiting forever for the last few components and not getting paid until they can complete the final product.
My main hope is that just as we could not see how bad the shortages would be, we cannot see how close we are to the end. If it took two years to get a part that shipped today, it might be reasonable to estimate it will take two years to get a part we order now, or even to tack on an extra year for good measure, but eventually things will be better. I expect inventories everywhere are building up (ours are, just not of the last few critical parts!), and the coming global recession that seems to be forecasted from all sides (e.g. by the IPC) could accelerate chip manufacturers finally catching up to the extra demand from the last few years.
Since we are a small business, broader economic downturns can sometimes work in our favor. Our customer base is such a tiny portion of the world, and some of them could do well even if on average the global economy does not. If the slowdown leads to parts we need becoming available sooner, that might overall be better for us. Some of our best supplier relationships came out of the 2008 downturn, when companies started caring about our business after losing some of their bigger customers. We also got a good deal on renting part of the building we are in after it sat vacant for a couple of years, and that served us especially well as we gradually expanded to the whole building over the past ten years.
It’s unsettling that after two years of parts shortages, it does not seem to be getting any better. The situation might even be worse than it was a year ago, but we won’t really know until we are out of it and things are actually good again. I know it has been difficult for our customers, especially those who built our products into their own products or curricula and are counting on us to keep their operations moving. Please know that we are working very hard to keep our stock and production levels up with the minimal possible disruptions, and thank you very much for your continued business and support.
November 2021 operations update: supply chain disruptions, price increases, and component rationing
 |
Nearly two years of operations under the COVID-19 pandemic are behind us. Like many other businesses around the world, our biggest challenges have moved from direct health and safety concerns to secondary disruptions, most notably the supply chain issues and the global chip shortage that has been making news and shutting down factories since last year. Initially, we were relatively isolated from the shortages because we had maintained a high inventory, often stocking a year or more of critical components. However, as the disruptions dragged on, our reserves were depleted, and we have had to resort to increasingly drastic measures to keep operating at all.
I apologize to our customers who are frustrated by our worsening response times, price increases, and unavailability of products. I hope showing you some of what we are dealing with will make it easier to understand.
Here is a screenshot from our internal system showing the inventory history of a relatively unremarkable component (a small MOSFET) that we have been using for almost ten years now:
 |
Inventory history for a component with shortages in 2021. |
|---|
The stock history is representative for a typical component that we gradually put into more product designs so that the rate of usage keeps increasing and the amount of stock we keep on hand gradually increases, too. Usage of this part ramped up in 2018, to around 35 thousand pieces per year. We last received some shipments in mid-2020 that put us in a seemingly-secure place, but the situation became less comfortable as we got into 2021, and the past several months have been downright alarming since we might only have enough parts for two more months, while the estimated shipment dates for my orders are well into 2022. And this is with us putting the brakes on parts usage!
Rationing
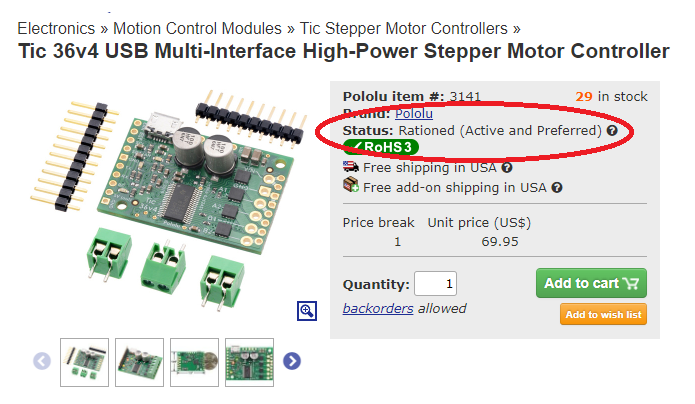
Slowing down component consumption is really not fun since our main options are just not making any of a product at all (sometimes we are forced into that option anyway once we run out of parts) or raising prices. Higher prices can make it confusing for customers to select among alternatives since we expect the more expensive product to generally be the better one. To help communicate that some products’ prices and availability are temporarily distorted, we added several rationing-related entries to our list of product status designations. You can see the status of each product along with stock and pricing information:
 |
We initially focused on reducing volume discounts, and building the rationing designations into our system let us automatically exclude rationed items from sales and other special promotions. It has been almost six months since we started officially designating products as rationed, and unfortunately, what we expected to be a temporary measure for a few select items has gradually affected more and more products as component shipments keep getting delayed.
Here is the inventory history for another component, a more expensive and specialized part than the previous one:
 |
10-year inventory history for a component being rationed in 2021. |
|---|
There were already some supply issues with the part in 2017 that led us to keep slightly higher inventory of that component, and you can see the change in the pattern as we ramped up our rationing efforts. We buy the part on reels of 1,000 pieces, so the upward jumps in the graph are multiples of a thousand, and we used to use up fairly high quantities in each manufacturing run, so the downward jumps were fairly sizable, too. For instance, we might make five hundred of a product at a time and just put it all in stock on the website and not make more for a couple of months. Starting in the second quarter of this year, you can see how the inventory graph is a lot smoother as we made much smaller production runs to preserve flexibility in which products to use the components.
This strategy does help us maximize the usage of the parts we have on hand, but it comes with many costs. Production is less efficient since the machine setup is the same whether we are making twenty units of a product or a thousand units. We also have much more internal scrutinizing, planning, and checking of which products to make since accidentally making the wrong product is a much bigger problem than it used to be—it could now mean prolonged inability to make a different, otherwise unrelated product. It’s also more difficult on customers who do want to buy in bigger volumes since we used to have more stock available on our website, and customers could just order. Now, when we show 29 of a motor controller in stock and a customer needs 50, they have to talk to us about how soon we can make the additional 21. This also strains our support staff resources and reduces the service quality for all customers. And the sad thing is that we are doing a lot more work to produce and sell fewer products.
What inventory do we do have?
You might be surprised to hear that our total inventory is actually at an all-time high. And apparently, that is fairly common, even among the biggest companies, including the main electronics distributors. When I was talking to my Arrow Electronics rep last month, he said his warehouse is full. I asked of what, and he said he didn’t know, but apparently not the parts he needs.
 |
I spend a lot of time trying to understand what we do have. We have thousands of unique components, and on average we have thousands of each one, so we have many millions of components to keep track of. Most products use many different components, and most components get used in many different products. If we are missing one part out of fifty to make a product, we can’t make the product. And usage rates for the same component are different in different products; what are we supposed to do when we have five thousand left of a component that we use in a $5 product that used to sell thousands of units a month and in a $100 product that sells hundreds of units a month, and the earliest estimated delivery of more components is eight months out? So far, we have mostly raised the prices on the $5 product, sometimes very substantially, while not changing the price on the $100 product, and that lets us keep some finished products available to offer.
There are more and more components that have been on order for over a year now, and meanwhile estimated ship dates for new orders are well into 2023 (not 2022!). It’s a scary time to be an electronics manufacturer.
Other cost increases
As I mentioned, we are going through a lot more effort to make fewer completed products, and that contributes to increased costs and higher prices independent of what we are doing with rationing. On top of that, prices for most of the components we have been using for a long time have risen substantially, even as our order volumes increase. Most increases have been in the 10% to 20% range, but several are 50% or more.
Then there are parts that we now buy in smaller quantities from catalog distributors like Digi-Key and Mouser (when we find stock there), and those prices can be several times higher. Some parts I bought a year ago for twelve cents each in quantities of fifty thousand are now costing 25 cents each in those bigger volumes, and if I order just a few hundred or a few thousand, they can cost a dollar each. If we just need one of those on a product we sell for $100, it’s not that big of a deal, but if there are three of those components on a product that used to cost $5, the price is going to have to go up, sometimes dramatically.
 |
Non-electronics component and material costs are also going up, though those have generally been in the more modest 5% to 20% range, but shipping costs are up a lot, so that disproportionately affects heavier and bulkier items. We have had to reprice some of our stepper motors primarily because of the shipping costs to get them here, while we have thus far been able to avoid raising costs on our micro metal gearmotors (though volume discounts are smaller than they used to be). Most of our products involve at least some processing in the US, but we are able to ship some items directly from our China warehouse to other countries to reduce the impact of shipping costs and the tariffs on many products coming into the US from China.
Broader problems and delays
 |
The broader supply chain issues are a problem, too, even though it’s not as bad as with the chip shortages. Most of our mechanical parts, from injection molded plastic parts to motors and servos, come from China, and we are more directly involved in getting them shipped here (unlike the electronics parts, which are also mostly made overseas but which we buy from American distributors who deal with getting the parts into the US). Fortunately, most of our components are small and light so we ship a lot by air anyway, but we do ship heavier and bulkier items by boat and have had our share of days looking at all the ships waiting off the coast of California and wondering when ours would finally get to dock. It seems like regular delays by various carriers like FedEx and UPS are also getting worse, and we have now had at least a couple of instances where really important parts we were waiting months for made it to the US or even to Nevada and then got lost.
I have been writing mostly about components and how it affects electronics we manufacture, which is most of our business, but the other small manufacturers whose products we resell are in the same environment, and so we are seeing price increases and extended unavailability of products from them, too.
Delivery delays and other problems are affecting our shipments to our customers, too. Unfortunately, we are again mostly at the mercy of the large shipping companies and the general situation that has led to reduced service levels around the world. Many of the providers have suspended guarantees of delivery times or extended the times they say delivery will take. We have recently added UPS to our standard shipping offerings during checkout, so our customers at least have some more options in case one service is particularly bad in their area.
When will it get better?
As I wrote a few years ago, we buy our electronics components through major authorized distributors, and we have so far not had to resort to going to secondary sellers and brokers (with the associated risks of ending up with counterfeit parts). From my talking to manufacturers’ representatives, my impression is that the semiconductor companies are just genuinely facing a combination of increased demand and reduced capacity as the pandemic interfered with their operations that are spread throughout the world. For example, ST was telling me about one motor driver that gets the silicon processed in Italy, then tested (still in silicon wafer form) in Singapore, and then chopped up and packaged in Malaysia. In this one instance, the silicon is done, and as operations resume in Malaysia, they should be able to get me some of the parts by the end of the year. But for other parts from the same company, such as microcontrollers, they don’t even have enough allocated to my general western North America region to meaningfully talk about where in the queue we are.
When I first heard predictions in early 2021 that the chip shortages would drag on through the end of the year, I didn’t really believe it. It’s increasingly clear that those predictions were right, but at least 2022 is not that far away anymore! And while we do have many orders with expected ship dates two years out (late 2023), we also have several with expected ship dates in early 2022 (and some parts have been trickling in, so it’s not as if we were completely choked off on all supply).
As we approach the holiday season when we traditionally have our biggest sale, we are assessing which products we can make and possibly discount. We have a few new releases this year that we are very excited about, but new products are especially difficult to ramp up, especially if they use new components we didn’t already have on order a year ago.
|
|

Thank you for your continued business and support
Despite the various challenges presented by the evolving pandemic and associated disruptions, we have generally been able to keep operating relatively smoothly this year. I know there are many small businesses of all types struggling or even having to shut down completely, and I am very grateful that we have avoided such extreme scenarios. Thank you to all of the employees at Pololu for so reliably keeping everything running, and thank you to all of our customers for your continued business. I wish everyone a safe and happy conclusion to the year and look forward to things improving on all fronts in 2022.
20 years since we shipped the first Pololu product
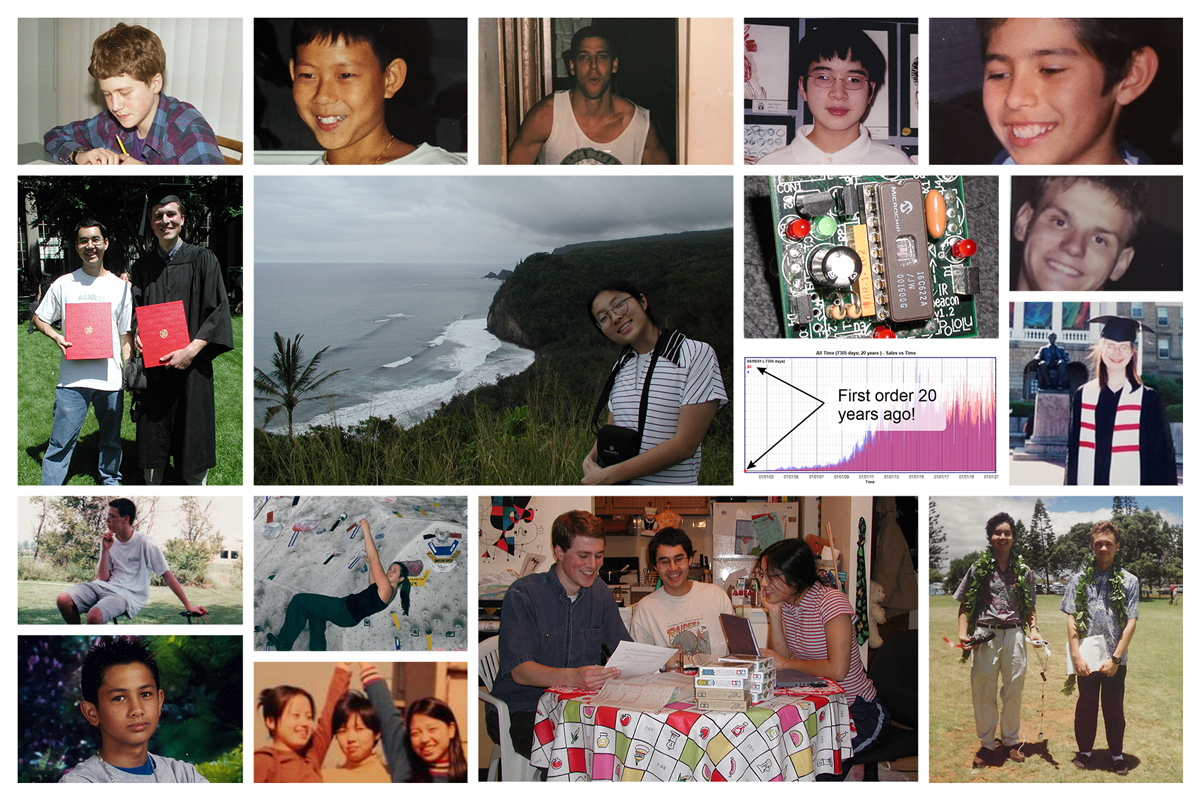 |
Today marks 20 years since we first shipped a Pololu product, on April 9, 2001! Join me for some reminiscing on where we were twenty years ago and for an update on how we are doing now, more than a year into the coronavirus pandemic.
I think I started Pololu in 2000. Probably in the fall, though I know for sure I was working on firmware for a servo controller (this one) over the summer of 2000. I had worked on other product ideas before that, too, but by November 2000 I had made the first board layout that had the name “Pololu” on it:
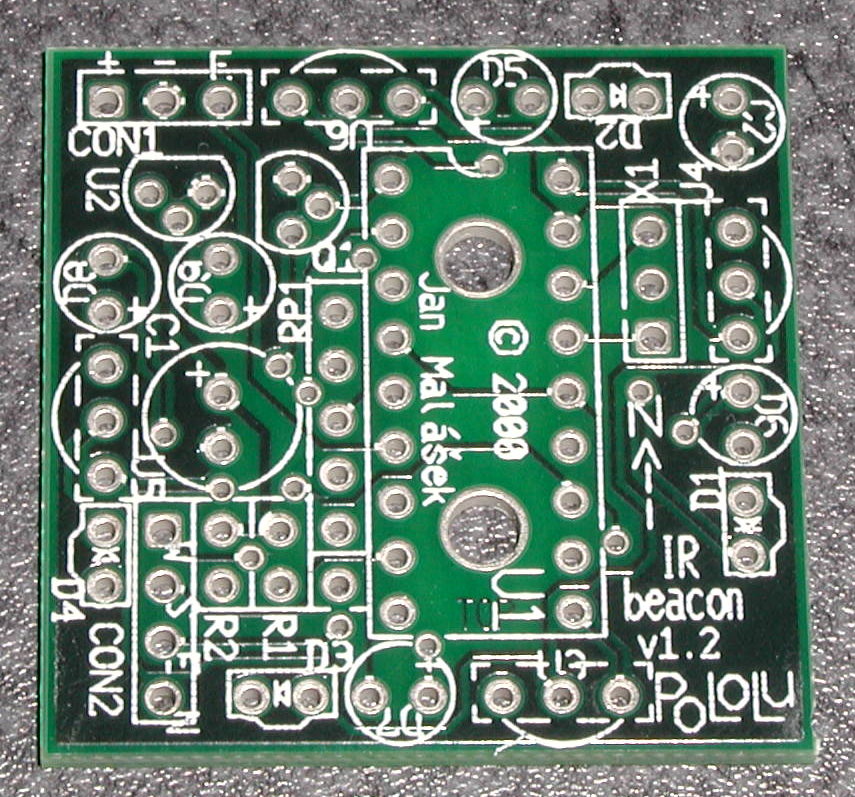 |
IR Beacon PCB showing “Pololu” name and copyright 2000; picture date 12 November 2000. |
|---|
Here are a couple more pictures of the first prototypes, apparently taken on November 12, 2000. That “v1.2” was the version that became Pololu’s first product. I have seen the picture on that product page over the years, but I had forgotten that we still had to do microcontroller development with special windowed ceramic packages back then, with a separate UV eraser device you stuck the chip in for about ten minutes to erase it. (Production parts would then get made with microcontrollers in cheaper plastic packages that were only programmable once.)
|
|

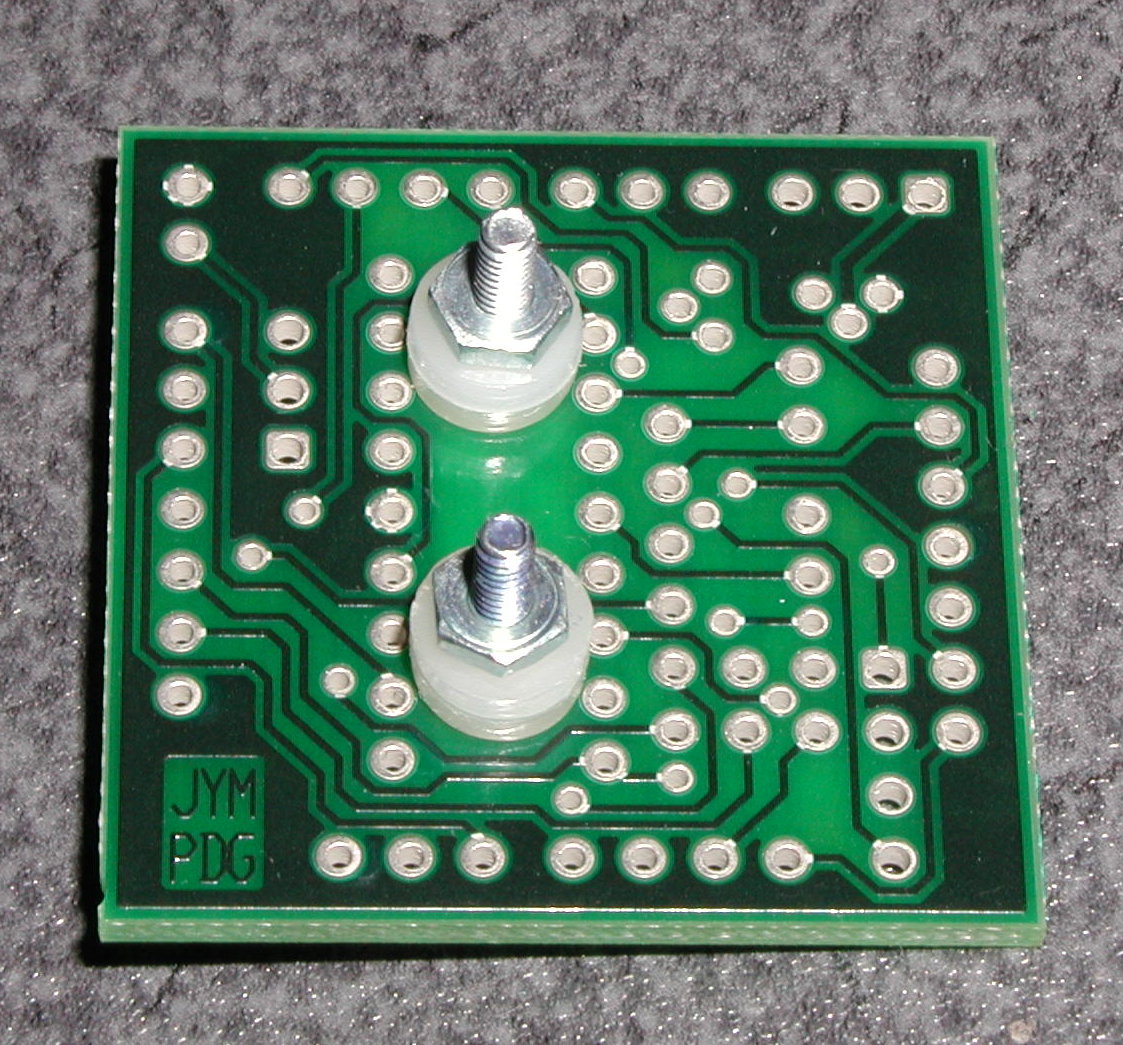
The picture on the right shows Paul’s and my initials on the back side of that PCB design, and Paul registered the pololu.com domain on November 18, 2000. Here is a reconstruction, based on the Internet Archive, of how the Pololu web site probably looked in February 2001:
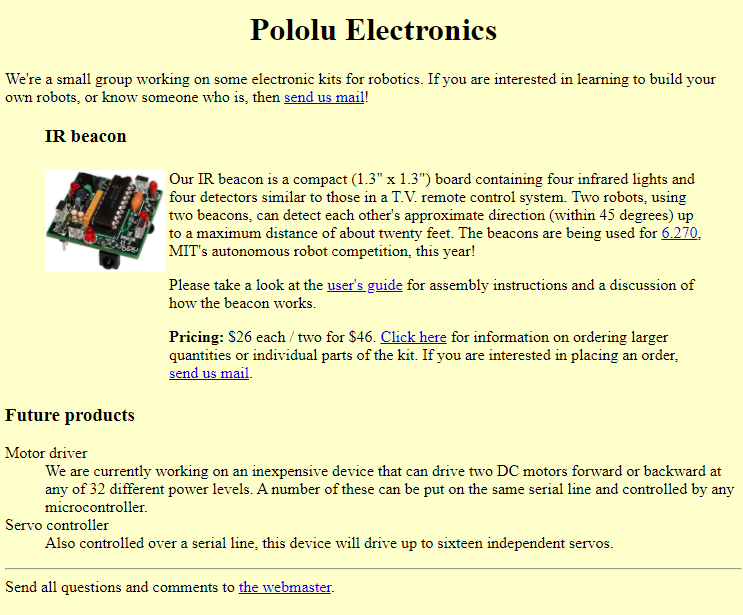 |
Reconstruction of how pololu.com looked in February 2001. |
|---|
Candice, Paul, and I formally incorporated Pololu in early 2001, while Paul and I were still undergraduates living in dorm rooms (Candice had graduated a year earlier and was working at The MathWorks). Here are some pictures in the dorm in that time frame (how do we not have any better pictures?):
|
|


And then we get to April 9, 2001, for which we have the first recorded order. This is what pops up when we open System 2, our system for running most of the company:
 |
All-time sales chart showing first order on 9 April 2001. |
|---|
When we started making that system in 2007, we imported the old data, including the fifteen orders we processed in 2001. Order number one was actually just a free sample to Mr. Hughes, my high school science teacher; we would get our first real sale to a paying customer on May 2.
Most of our time was devoted to school, though we did keep working on products we thought we would eventually release, especially when we could incorporate it into our classwork. This first prototype of our Orangutan robot controller (flash programmable microcontroller with a serial bootloader, plus integrated motor drivers) was also part of our final project for our 6.836: Embodied Intelligence class:
 |
Original Orangutan robot controller prototypes, 21 April 2001. |
|---|
Paul and I were class of 2001, so we were close to done with our undergraduate degrees, and I was effectively a grad student that last semester of my fourth year. I skipped the graduation ceremony, but the lab I was working at was right next to the site anyway, and Paul spotted me one of his diplomas so I could feel a little more festive.
 |
MIT class of 2001 graduation, 8 June 2001. |
|---|
This was all still before the 9/11 terrorist attacks, which we experienced quite intensely because of the two flights originating from Boston. Paul had moved out of Massachusetts by then, and I had moved out of the dorms to an apartment in Watertown. Paul visited Candice and me there in February 2002, where we at least remembered to take a picture of our board of directors meeting:
 |
Pololu directors meeting in Watertown, Massachusetts, 3 February 2002. |
|---|
I ended up skipping my second chance to be in the graduation ceremony and moved out of Massachusetts after wrapping up my master’s degree requirements by the end of May. You can see pictures from the next ten years of Pololu in my Ten years in Las Vegas update almost nine years ago.
Besides just focusing on Candice, Paul, and myself, I think it would be fun to look at where some of our other key people were twenty years ago, in 2001. There are fifteen of us still at Pololu who have been here at least ten years, which also means we have been working together since before we were at our current building. Unfortunately, not everyone has ready access to good pictures from 2001!
Ben had these two physical pictures that he scanned for me:
|
|

That second one is actually four years older, probably from May 1997, close to our high school graduation. I seem to be holding an RC transmitter and part of a robot arm.
Fang, meanwhile, was in college in China, and it would still be many years before she would even meet Paul:
|
|

David was also there for Paul’s graduation, so that must be when I first met him.
|
|

He would still go through most of high school and four years of college before moving out to join us in 2008. If you have used any of our USB products, you have benefited from his great work.
David’s college friend RyanTM also moved here from Illinois to join us later that year. These pictures from late 2000 were the closest he could find to 20 years ago:
|
|

Ryan gradually became involved in almost all aspects of Pololu, including our facilities and production; since the pandemic started, he has been working mostly remotely and has been able to focus more on our IT needs.
David’s and RyanTM’s college friend Kevin worked at Intel for two years before coming out to join us in 2010.
|
|
|


Kevin and RyanTM were in the same grade at the same high school, but they wouldn’t meet until their sophomore year in the fall of 2001.
Linnea has been with Pololu the longest out of people who were not my friends from school. She also finished college in 2001, at the University of Wisconsin, and moved to Las Vegas that year. She would join us six years later after responding to an ad for an office assistant/shipping clerk.
|
|


We had already filled the position she applied for, but we hired her as a laser cutting quoter; she then moved through various roles at Pololu and has now been our HR manager for many years.
Arthur, our operations manager, has also been with us since 2007. Here is his school picture from 20 years ago, when he was a seventh grader in California!
 |
He recalls, “I moved to Vegas without any reason or real plan other than to get away, and when I got here I was totally NOT looking for a job right away. I really only applied here because ‘laser operator’ sounded so cool.”
You might recognize Emily from our videos; she has also had many roles in Pololu, from pick and place machine operator to product designer. She grew up in Vegas and was starting high school in 2000/2001. Here is one of her videos!
|
|
|


That last picture on the right is at the same climbing gym where Ben, Candice, Fang, Paul, and I eventually met her in 2008 when she was finishing up her physics degree at UNLV; she joined us in 2009.
Jennifer joined us in 2008 and effectively was the shipping department. She became the shipping manager as we grew, but she also became more and more involved in the non-technical customer service side. She has been dominating our Halloween costume contests for years, so it’s fitting that the only pictures she could find from 2001 were from Halloween.
|
|

We were already moving toward her working exclusively in customer service, and once the pandemic hit, that accelerated the transition; she has been working mostly remotely for the past year, with occasional visits in person just to make sure she can still help out in shipping if we need it.
RyanB is our current shipping manager, and he has been with us since early 2010. Here he is back in Minnesota in the summer of 2001:
|
|

You might recognize him on the forklift from some of my new equipment arrival posts like this one.
Damian is the youngest among those who have been at Pololu over ten years; here he is back in late 2001, “probably in fourth grade”:
 |
He joined us in 2010 a year after finishing high school and is now in charge of our electronics production equipment and processes.
Rocky is the fifteenth person who has been with us since 2010 or earlier, and he started on the same day as Damian.
 |
Rocky’s “picture from 2001 I hope”. |
|---|
Rocky was working on his mechanical engineering degree at UNLV for his first many years at Pololu, and there were stretches where he was here part time, but he’s been here full time since he graduated in 2018, working on things like quality control and characterization of our gearmotors.
Pololu Valley – As I was looking through old pictures, I was hoping to find one of Candice and me at Pololu Valley in Hawaii. We were there in 2001, and it turns out that’s the last time Candice was in Hawaii (and I only went back once after that, due to a family emergency in 2008). Apparently I took all the pictures and selfies were not so much a thing yet.
|
|
|



The extra data in the picture files indicates this was the day after Christmas in 2001. I don’t remember if we were already thinking of moving to Las Vegas at that point, but I am sure I was not thinking that would be the last time we were there for the next twenty years; otherwise, I definitely would have taken better pictures!
Pandemic recovery
We hit this twenty-year milestone soon after we passed the one-year anniversary of Nevada businesses getting shut down in response to the coronavirus, which happened on March 18. That makes reflecting on the past 20 years especially strange, with the world as it was just thirteen months ago seeming so foreign now. Life has its ups and downs, and we are not where I perhaps naively dreamed we would be by now, but I am also extremely grateful that we are still functioning at all. When I wrote that first blog post the weekend after the shutdowns started, I really thought we might not make it. I was telling everyone, even these long-term employees I just wrote about above, to go file for unemployment insurance because we wouldn’t be able to pay them.
It took me about five years to get over Dez dying, in the sense that it wasn’t on my mind all the time and that I could feel joyful and think about celebrating successes without flinching at the thought of some disaster blindsiding me. This feeling last March was not as bad, but it still really sucked. I mention these things because I do not want to seem indifferent to the pain and suffering for the millions around the world for whom this pandemic has been that life-shattering event. I also want to write down, before I forget it, how awful and terrifying my situation felt in March 2020, and to help convey the depth of the gratitude I feel toward those who helped Pololu make it this far.
I was already cautiously optimistic in my last update from late February, and since then there has been a very unexpectedly positive development: we started getting vaccinated at the beginning of March! Literally the day after I wrote in my internal company blog that it might still be a few months before we get our vaccines, Nevada opened up eligibility to manufacturing and other sectors applicable to Pololu. On March 3, I got my first shot!
 |
Jan and Paul got their first COVID vaccines on 3 March 2021 at the Las Vegas Convention Center. |
|---|
And, two weeks ago, I got my second one! We have also been informally tracking how many of us have gotten the vaccines, and watching these counts go up has been a huge morale boost.
 |
The chart is a lower bound since it only includes people who have shared more specific details for the purposes of generating the chart; I think the actual count of people who have gotten at least one shot is already past 40. There are just over fifty of us now, so that’s around 80%! And over half of us already have the second shot or a single dose of the Johnson & Johnson vaccine.
With the vaccination numbers similarly going up around the country and around the world, and with growing evidence that they work, it’s easy to be optimistic that the worst really is behind us this time. There’s a lot of work to be done, but we have a great team to do it. Thank you so very much to all the customers, suppliers, collaborators, and Pololu employees, past and present, who have kept us in business for 20 years, including this last very difficult year.
And thank you Ben, Fang, Paul, and Candice for doing this with me. I’ve gotten to work with my best friends for two decades, and practically speaking, for my whole life. Thank you for making it awesome!
 |
Related products



February 2021 coronavirus operations update
 |
 |
We are approaching a year since governments in the US started shutting down businesses in response to the pandemic, and by this time last year, the then-novel coronavirus was already causing what we naively considered to be severe disruption to our operations because of the restrictions that were implemented in China. (We have an office in Shenzhen, and many parts we use, such as bare printed circuit boards, come from China even when our China office is not involved).
The past year has been so filled with ups and downs that it’s difficult to recall how things were when. In my last update in mid-November, I almost wrote something about no one at Pololu having tested positive for COVID yet. That same week, we had several employees test positive as we were caught up in Nevada’s surge in cases. Nevada, like many other states, newly tightened restrictions on businesses and public gatherings, and we scaled back in-person staff to only those necessary on premises for basic operations. Over the holiday period, we had an additional 10-15 people who had been back return to being off-site, leaving around 30 on-site. Fortunately, we seem to have prevented any coronavirus transmission here, and those who did get sick have recovered without serious complications.
 |
Nevada’s government-mandated “pause” was extended twice, and some of the restrictions finally began easing in mid-February. We did have some additional isolated COVID cases among our employees this year, but we have been able to maintain production and shipping throughout this time. It looks like new infection rates are coming down and vaccination rates are going up, which makes it easy to be optimistic that the worst is finally behind us. Like everyone else in the world, we don’t know what changes are still ahead and how close we are to full (or at least substantial) resumption of activities, but it was a big relief at least to make it through 2020, and now the first two months of 2021.
Looking back, we were fortunate to be where we were when the pandemic hit us. One major example is that we did some fairly substantial renovations from 2018-2019, and we spent most of 2019 with big holes in our floors and many areas of the building impassable. I had this hole outside my office starting in February 2019, and the stairs weren’t even usable until July (and they were finally finished even later)!
|
|


And our production area looks much better today than it did for most of 2019:
|
|


And while it’s still sad to see how empty and underutilized our breakroom has been for the past year, it still beats the piles of dirt we had inside less than a year before.
|
|


2020 was stressful enough as it was, and I am very grateful we wrapped up the remodeling by the time the pandemic hit. I feel so sorry for all the businesses who made similar recent investments before the pandemic and then had their businesses completely shut down. At least we are still able to use the space, and I hope it will eventually see more use as it gets safer to have more people in the building.
So, where does that leave us going forward? I’m reminded of a false “proof” by induction, that I can carry infinite weight because I know I can carry some weight and for any weight I can carry, I can carry one gram more. It’s easy to take it for granted and get lulled into complacency that since we’ve made it this far, we’ll make it forever. (That keeps being true until it’s not.) However, I do want to recognize that while in some sense we lost a year, in many ways, we are in a better place than we were a year ago. One way we are acknowledging this is to update our donation requests to be less about our survival. I am hesitant to completely remove those requests and declare victory since that would be an unwarranted arrogance, so I would rather reframe the donation requests as an invitation to support us if you like what we do, similar to how you might donate to content creators on YouTube or Patreon.
Our operations are still stretched fairly thin since we have about 30% fewer people doing almost the same amount of work as we did a year ago. Some things are more difficult to do now than before, but we also have a more experienced core team and we keep working on our processes to do things better. Our emphasis is on normal production and order fulfillment, which I hope has gone well enough that most customers will not have noticed any changes. New challenges, including component shortages and other supply chain disruptions, keep cropping up, but that was also true of just normal life before the pandemic, too. Some of our extra support and special services like product customizations have been affected, but we will work on improving those and on more effective ways to address the very broad range of challenges our customers face.
Thank you to everyone who has supported us and helped us get through this past year. We hope the worst is behind us, and we will keep working hard to contribute to a better future for all of us.
Our newest robot, 3pi+, is here—Arduino-compatible, USB, encoders, full IMU and more!
 |
I am thrilled to announce the release of our newest robot, the 3pi+! This new platform is a major upgrade from the original 3pi robot we introduced twelve years ago. At 97 mm, the diameter is just 1mm larger than the original, and the general concept of a tiny, fast robot powered by four AAA batteries and two micro metal gearmotors remains the same. However, just about everything has been redesigned from the ground up to add the extra features everyone has been asking for.
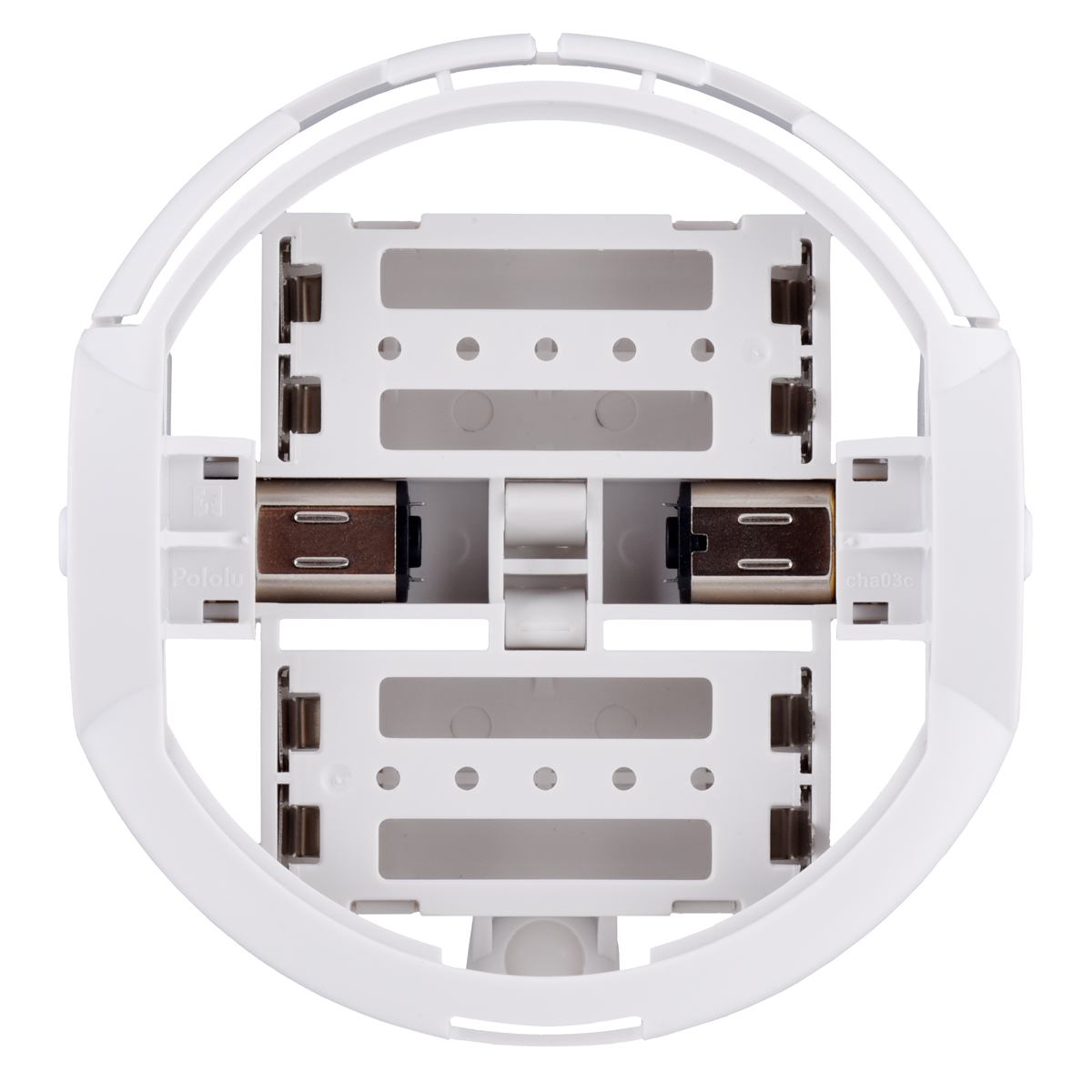
First off, the 3pi+ is now a platform that encompasses a range of products, not just one particular robot. This is enabled primarily by the chassis now being an independent structure rather than being a specific circuit board with motors strapped on:
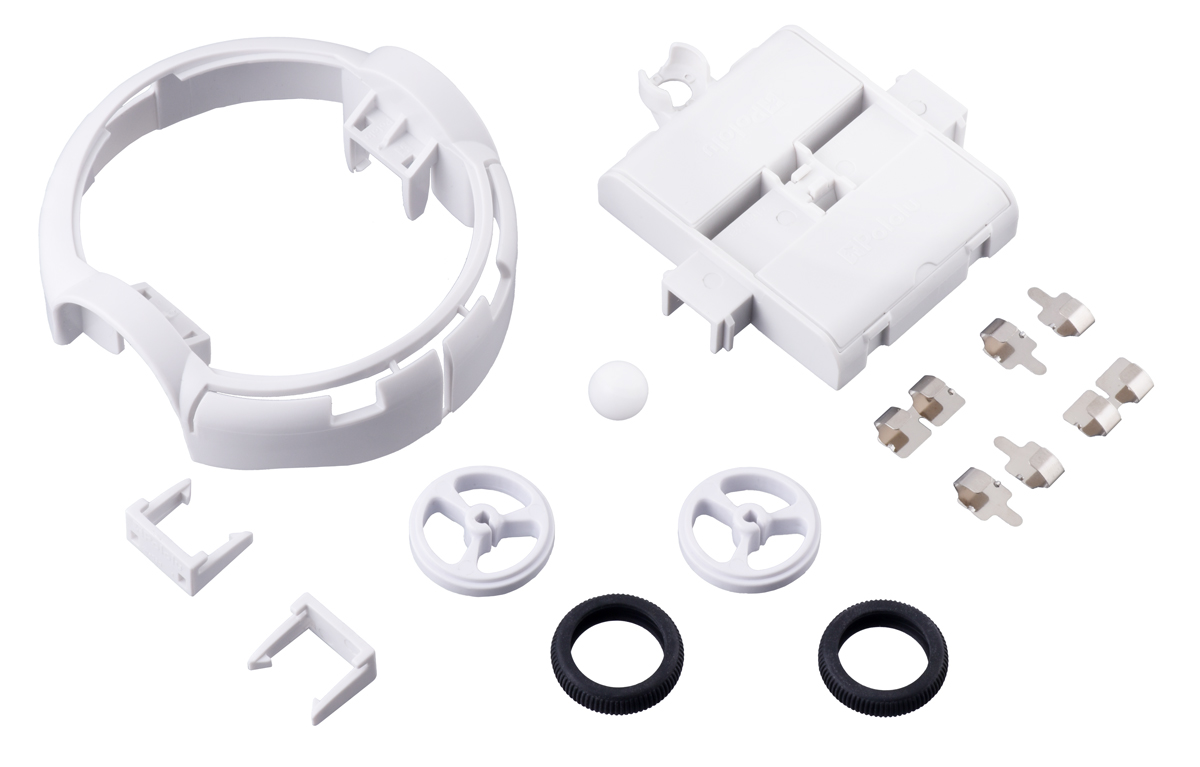 |
3pi+ Chassis Kit (No Motors or Electronics). |
|---|
|
|
|


|
|
|
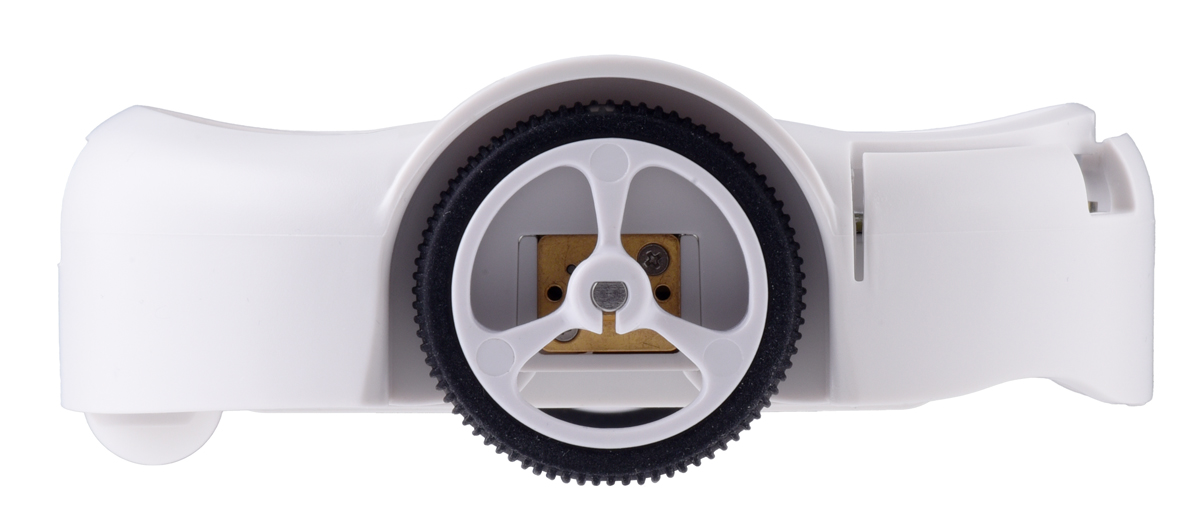


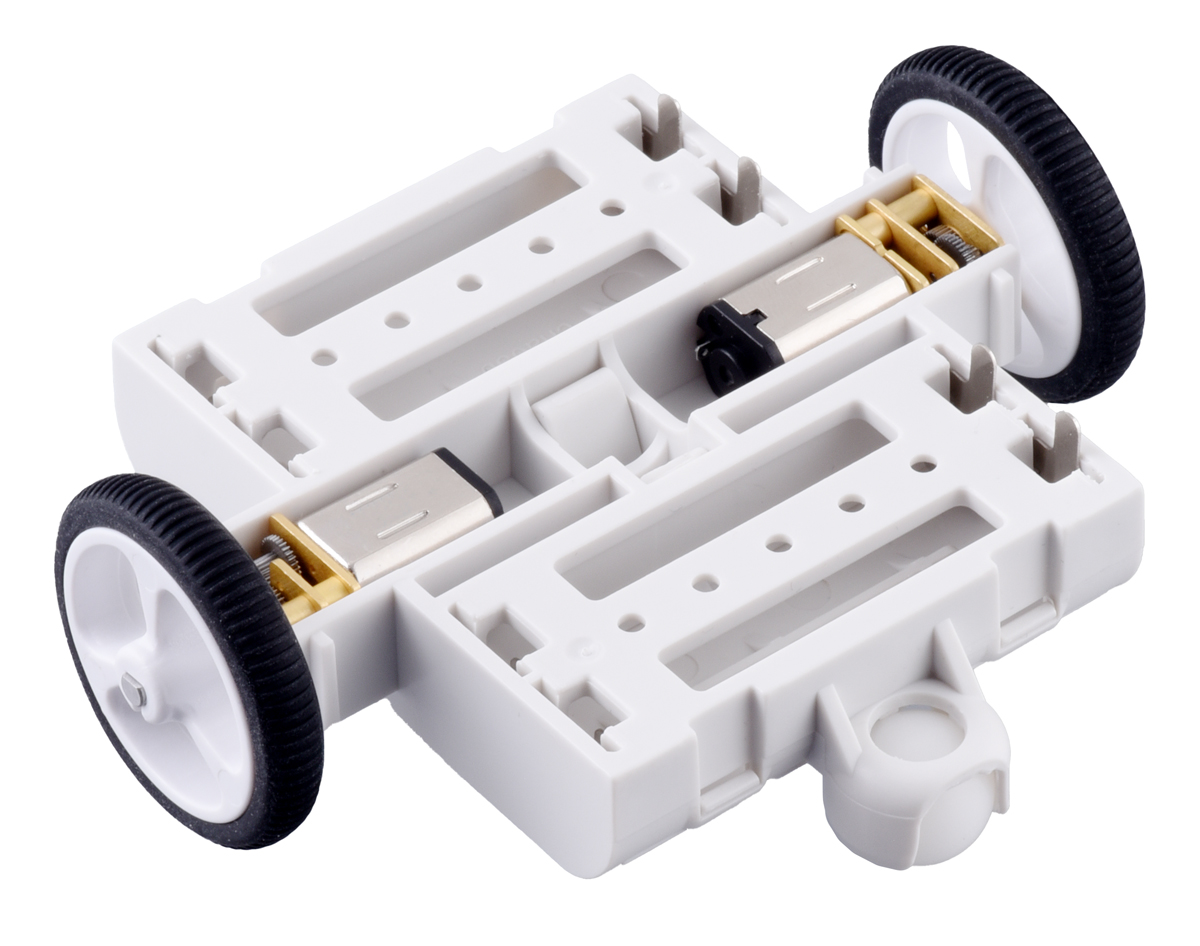
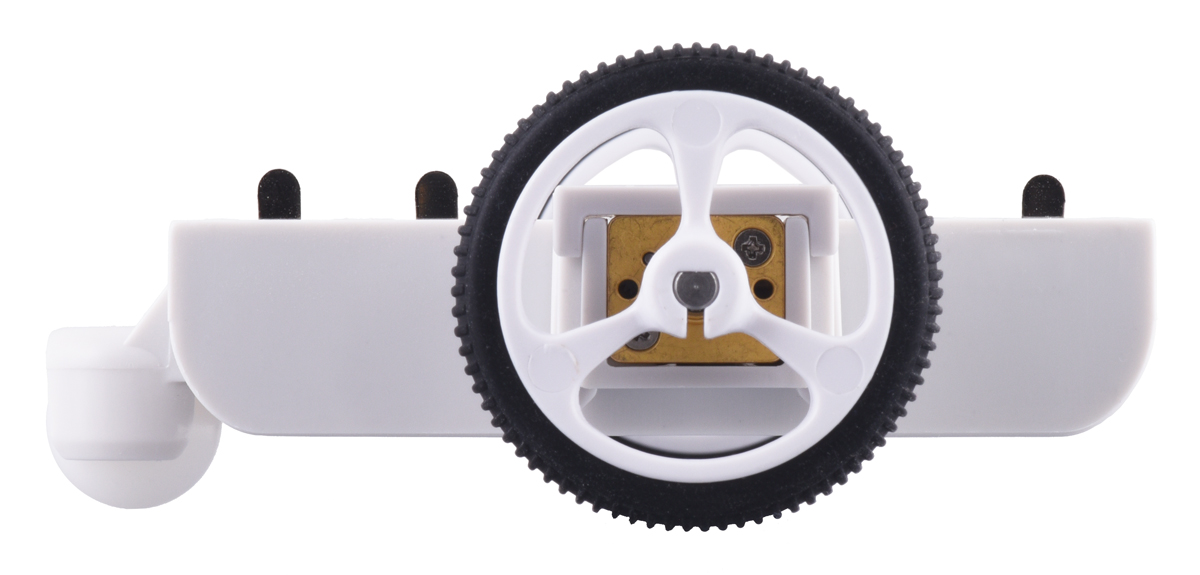
The chassis incorporates the battery holders, motor mounts, and ball caster. An outer bumper skirt is removable and the motors can instead be held in by separate clips (also included in the kit). The left-most picture shows the chassis with motors installed but without the bumper skirt or motor clips, and the next two pictures show the motor clips installed:
|
|
|

Making the chassis separate from any electronics means that you can use it with your own electronics and that we can make various versions with different capabilities and microcontrollers.
3pi+ 32U4
The first full 3pi+ robot we are launching is the 3pi+ 32U4, which is based on an Arduino-compatible ATmega32U4 microcontroller from Microchip (formerly from Atmel). Like the original 3pi, the 3pi+ 32U4 has five integrated downward-looking reflectance sensors, making the robot a great starting point for line following and line-maze events.
The 3pi+ 32U4 offers many major improvements over the original 3pi, including:
- ATmega32U4 microcontroller with Arduino-compatible bootloader can be programmed directly through a USB connection
- Quadrature encoders on both motors for closed-loop position and speed control
- Full 9-axis IMU (three-axis gyro, accelerometer, and compass)
- Bottom-loading battery holders keep batteries accessible even if additional levels are added
- Full wrap-around bumper to protect electronics from collisions
- Two bump sensors on the front
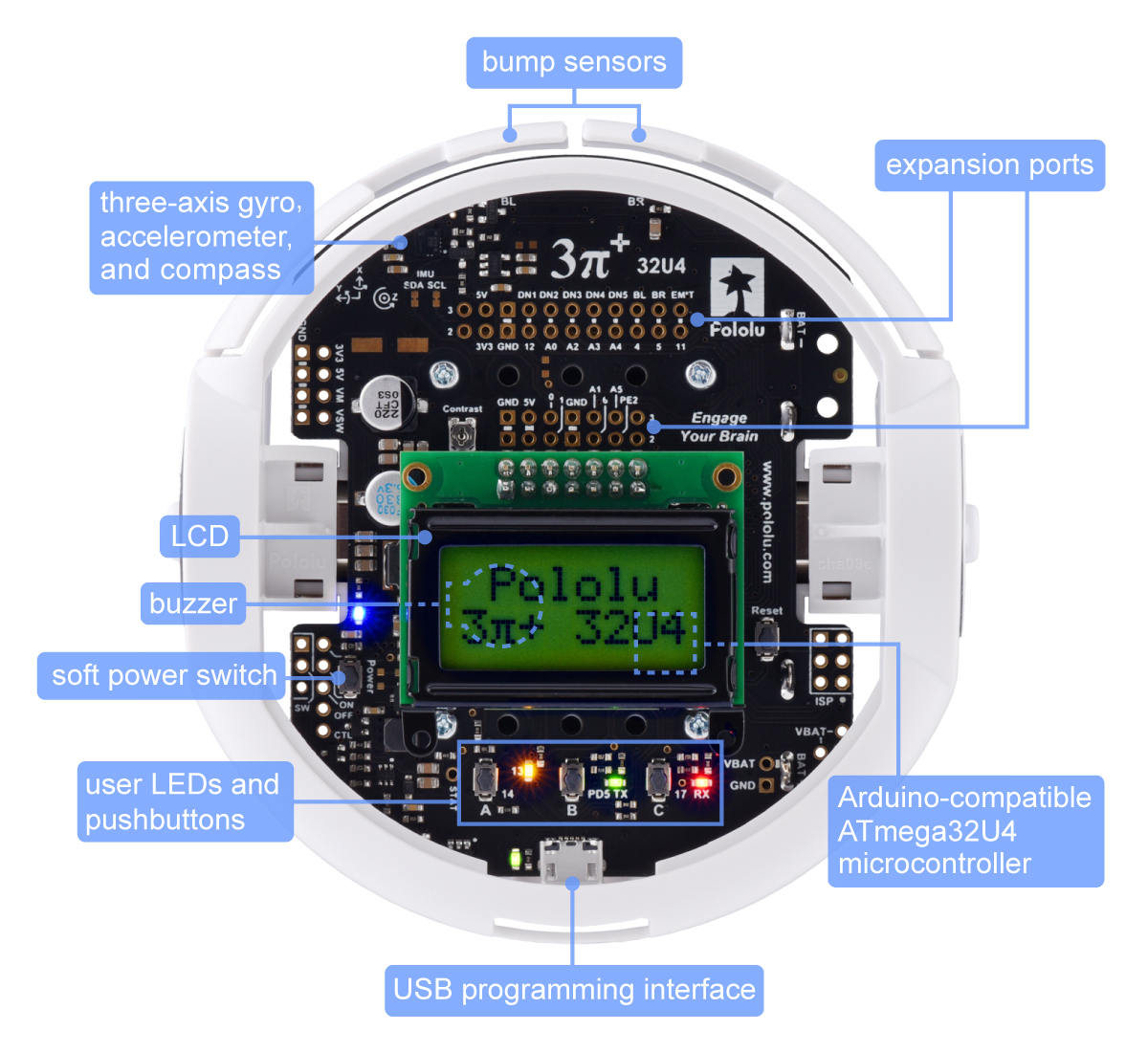 |
3pi+ 32U4 Robot features, top view. |
|---|
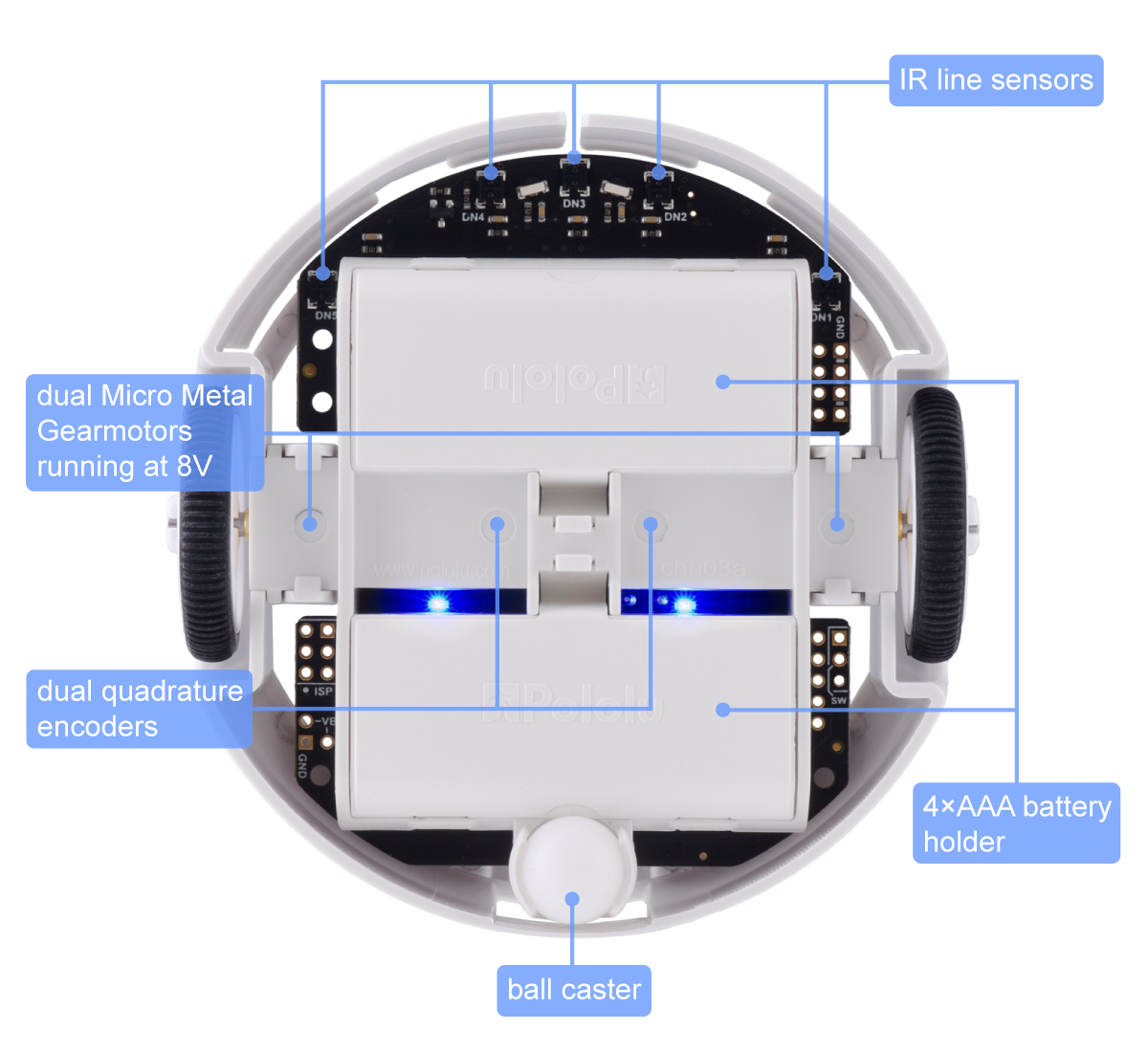 |
3pi+ 32U4 Robot features, bottom view. |
|---|
The 3pi+ 32U4 is also available with three motor options for different usage scenarios:
| 3pi+ 32U4 Version | Products | Micro Metal Gearmotor | Top Speed | Comments |
|---|---|---|---|---|
| Standard Edition | assembled or kit | 30:1 MP 6V | 1.5 m/s | great all-around balance between controllability and speed, with top theoretical speed above that of the original 3pi |
| Turtle Edition | assembled or kit | 75:1 LP 6V | 0.4 m/s | longest battery life, easiest to control, appropriate for swarm robot projects or classrooms where you might not want robots flying around the floor (or desktop) too quickly |
| Hyper Edition | assembled or kit | 15:1 HPCB 6V | ~4 m/s | ridiculous speed, which can definitely be fun. But, controlling that speed can be difficult, which can make the robot more prone to self-destruction (or at least self-inflicted damage), so we recommend this only for advanced users |
These three 3pi+ 32U4 motor options are available in assembled or kit form, and for those who want to do your own thing, the parts are available separately so that you can pick some other motor or gear ratio.
Normally we would have an introductory special for this big of a new product release, but since we are about to launch our annual Black Friday and Cyber Monday sale, you can get a great discount on the new 3pi+ there!

Related products





November 2020 update after 8 months of operations under coronavirus
This week marks eight months since business shutdowns began in Nevada in response to the coronavirus pandemic. Here is an update about how we have been surviving at Pololu since my last detailed post in April, when we got our PPP loan.
 |
We managed to reach a record sales quarter for Q1 despite the last few weeks being under the Nevada emergency measures and February onward being disrupted by the shutdowns affecting our China operations. Sales really dropped in April and even more in May, leading to Q2 sales ending up the worst since 2013. The money we received in April from the PPP loan allowed us to keep paying those employees who were still working and to cover health insurance and other benefits for the rest. We submitted our PPP loan forgiveness application in early July on the day our bank released their application and kept in constant contact with our bank rep while we maintained core operations with a minimal staff.
 |
The initial loan application had been approved very quickly, so we were hoping to get a resolution on the forgiveness similarly quickly to let us know where we stood regarding how much we would be in debt. We made some tough staffing decisions in July and August, and that turned out to be a very good move because the loan forgiveness process ended up taking a lot longer. We started the year with around 80 employees, and by the end of August, we had reduced that to around 55, of which about ten work only remotely. Everyone else has now formally quit or been laid off, with some hope that most of them could eventually return once the pandemic is under control.
Q3 brought several special high-volume sales, including components going into coronavirus testing equipment around the world, which helped Q3 sales inch past our Q1 sales for a new all-time record sales quarter. Perhaps some of that was also impacted by orders delayed from Q2 and from schools buying more kits for the resumption of classes in the fall. It sure felt like things were going in a good direction, which I guess is how a lot of the world felt.
 |
The news did not stay good for long as sales dropped a lot again in October, falling below our April low (but not getting as bad as May) as the new wave of COVID cases swept Europe and brought in renewed shutdowns in many countries there. November has so far also been weak as the coronavirus continues to surge across the globe.
We got one bit of good news for Pololu last week when our PPP loan forgiveness went through! We did not get our whole loan forgiven, but it was over 90% of the loan amount, which is a substantial amount of money that covers a lot of our losses from Q2 and lets us approach the end of the year with a bit of cash reserves instead of being in a hole. It’s a huge relief knowing we should be able to ride out the holiday season without having to do further layoffs.
 |
We are of course working hard to do more than just to get by for another few months. Some of the staff we brought back in the summer are working on new and exciting products, including resumption of projects we had been working on long before the coronavirus hit. We have not even done proper announcements of some of the items that are already released, including our 3-channel wide field of view (FOV) distance sensor module.
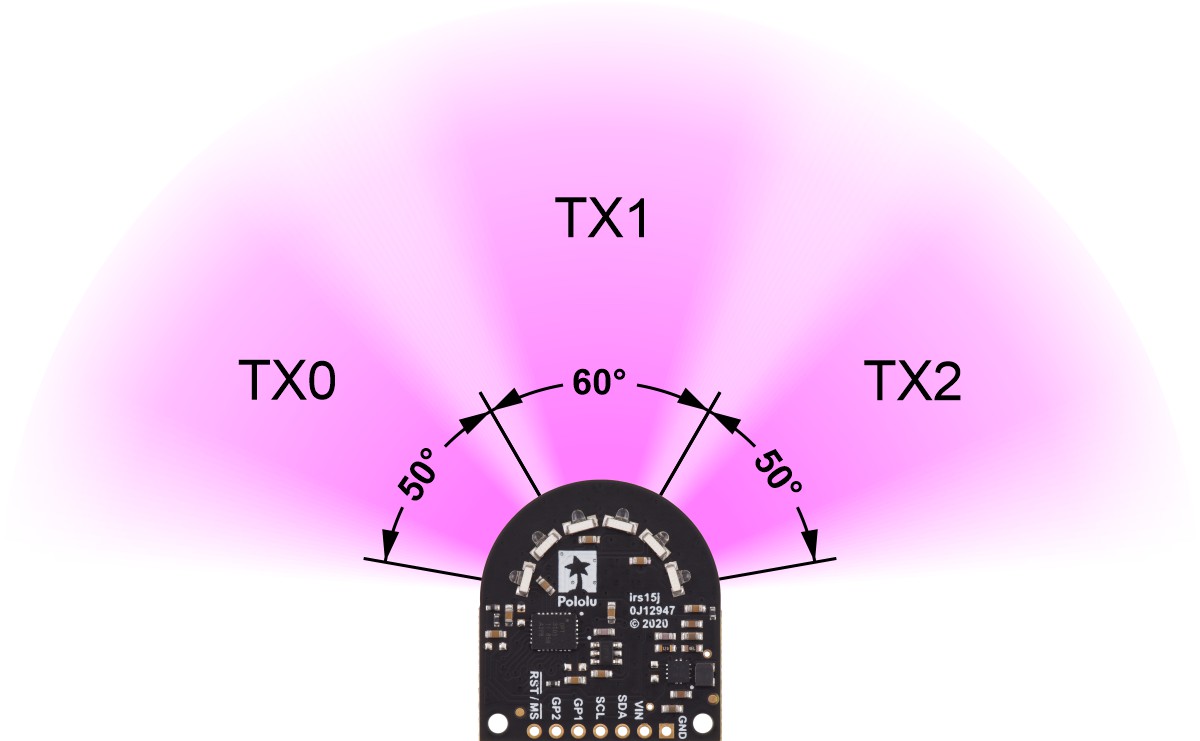 |
That was a very challenging project that I still intend to write about in a separate blog post. Right now, I have one more product to tease that we are pushing to release in time for the holidays!
|
|


Speaking of the holidays, normally we would be gearing up for our biggest sale of the year, our Black Friday/Cyber Monday sale that has run from the Wednesday before Thanksgiving through the following Monday. This also made that period very busy for our shipping and manufacturing departments. Since we are working with a reduced staff this year and many people are already stretched thin covering multiple roles, we will be scaling back the intensity of the sale and running it longer in the hopes of distributing the load on those departments. Last year, we introduced a design-your-own-doorbuster promotion, and that was pretty fun to run, so we’ll try to do that again (though we’ll probably be less open to selling things at a loss just to be in the holiday spirit).
Only six more weeks of this crazy year to go! I am so grateful to everyone who has helped us get this far, from all the customers who kept ordering to the employees who stuck with me through the scariest times to everyone who has made a donation. Thank you very much and stay healthy and safe, everybody!
First new products under emergency operations - new servo wheels!
We are into May, and after almost 8 weeks of shutdowns and emergency operations, most of the world’s attention seems to be moving toward reopening and how to return to some semblance of normal, or at least longer-term sustainable operations. With no particular medical solution even on the horizon, it’s clear that we have a long way to go, and a city like Las Vegas is going to be hurt especially hard and for a long time by changes people will adopt until they are comfortable flying for fun again. Pololu has managed to hold up much better than I initially feared during the first week of mandated shutdowns, and I am especially grateful to all of our customers and staff members who have worked hard to get us this far.
It is with this backdrop of gratitude for making it this far while realizing we still have a long way to go that I am especially excited to announce our first new products released since the pandemic hit!
 |
 |
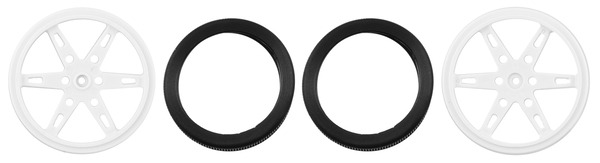 |
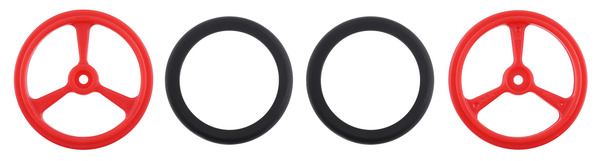
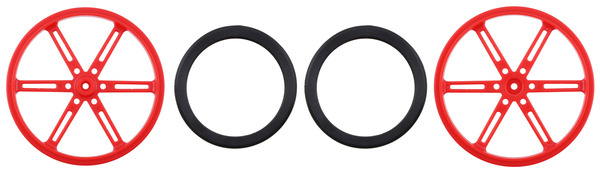 |
In all, we have eight new wheels for micro and standard sized servos. These are red and white versions of the four sizes we released in black back in January. Since we are operating with a minimum staff on site, we don’t have many actual pictures of the new wheels in action, so I will use the pictures with older black wheels for the rest of the post.
 |
Black Pololu Wheels for Standard and Micro Servos – 90, 70, 60, and 40 mm diameters. |
|---|
 |
We have small, 40 mm and 60 mm sizes that are compatible with micro servo splines with 20 teeth and a 4.8 mm diameter and can be used with the following continuous rotation servos that we carry:
- FEETECH FS90R Micro Continuous Rotation Servo
- FEETECH FT90R Digital Micro Continuous Rotation Servo.
 |
We have larger 70 mm and 90 mm sizes that are compatible with standard servo splines with 25 teeth and a 5.8 mm diameter and can be used with the following continuous rotation servos we carry:
- FEETECH Continuous Rotation Servo FS5106R
- Power HD Continuous Rotation Servo AR-3606HB
- SpringRC SM-S4303R Continuous Rotation Servo
- Parallax Feedback 360° High-Speed Servo
If you plan on using the wheels with a servo not listed above, be sure to check your servo’s specifications for compatibility as servo splines are not standardized.
I was never especially fond of continuous-rotation servos, but there’s no denying that they’re often a quick and relatively simple way to get something moving, both from the electronics side (since the motor controller is built into the servo) and the software side. I am a fan of building your own unique robots, so I am happy we now have a range of size and color choices to give you more problem-solving options and variety in your robots.
Like many of our plastic products, these wheels were designed by us in Las Vegas and then injection molded in China. Since we already had the design and molds finished before we released the black versions, these new products are not the most new from a design perspective. We made the black ones first, and red and white were supposed to follow shortly after the Chinese New Year holiday. As we all got reminded, things don’t always go according to plan. And now, what should have been a minor new product has additional sentimental meaning as our first new product since the coronavirus upended our lives and a symbol of our determination to carry on.
We had been announcing new products along with introductory discounts for the last few years, and I wavered for a bit about doing extra discounts for these wheels. Shipping costs have gone up dramatically, and we’re trying to raise whatever money we can, so extra discounts are not the first thing I felt like doing. But the whole point is that we do want to celebrate at least a little! So, hooray for the continuation of the new product discount tradition:

The first hundred customers to use coupon code SERVOWHEELS can get 22% off up to 3 pairs of each size! And, if you are one of the lucky ones not especially financially hurt by the pandemic and are interested in these wheels, please consider getting them without the coupon or even donating to help Pololu keep operating. We have set up item 2400 for donating in $1 increments.
Thank you to all of you who have donated to us or otherwise supported us over the past two months. Stay safe and healthy, everybody!
Related products









Rethinking open source in the context of the coronavirus pandemic
We are into week 6 of emergency operations. Our day-to-day routines are largely unchanged from what they were last week (we continue to ship all orders on time with a reduced on-site staff), so please see my earlier posts for more details about that. After more than a month of a new normal setting in, we are striving for a balance of avoiding complacency in daily operations while planning for a future that will likely never be back to how things were a few months ago.
One of our team members passed away (probably not directly related to the coronavirus)
On the complacency front, we were reminded of the stakes when one of our employees unexpectedly passed away at the end of last week from a sudden illness that, from the limited information we have available, was not related to the coronavirus. She was not part of our reduced, on-site staff, so I last saw her in person six weeks ago, and she was in contact a few weeks ago. As the toll of the pandemic mounts, more and more of us are going to be hit increasingly personally, from losing jobs and businesses to missing out on pivotal moments like being present at a child’s birth, to literally life and death experiences made even more painful by new restrictions on being with loved ones and being able to mourn.
However things play out and however bad they get, let’s try to be part of making things better. We can be responsible, supportive, useful, thoughtful, helpful. Many of us are suffering, and probably the only ones not afraid are the ones too unaware to know they should feel some fear. But we can acknowledge the fear without letting it completely overpower us, and we can still look for places in our lives where we can make a difference and decide to make things better.
Rethinking open source in the context of the coronavirus pandemic
 |
The rest of this post is about a longer-term strategy I am thinking about in response to the pandemic: moving toward more open-source projects (both for software and hardware). I would very much appreciate any thoughts and advice people have on the subject.
I wrote about open-source hardware exactly eight years ago this week. I just read it for the first time in maybe five years, and although I feel like I could have written the same thing recently, in many ways I’m a different person than I was then, with the usual progress one would hope for from living another 25% longer, supplemented with extra jolts to my system from things like my baby dying the day before he was born over five years ago and the coronavirus pandemic we have all been shocked by this year. It took me most of those five years to really be able to move on from Dez dying, and when I was locking up Pololu on the Friday a month ago after the first week of escalating government-mandated shutdowns, I really thought I might not be reopening it for weeks and that there would be little chance of Pololu surviving.
Having weathered the past five weeks of emergency operations and being one of the lucky businesses to get temporary funding via the Paycheck Protection Program (PPP loan), my outlook about Pololu making it has substantially improved, and with solvency likely assured for at least a few months, I am thinking about strategic changes for medium and long-term survival in a very different world where the future looks especially uncertain. Here are some of the changes to the world and to Pololu that make open-source projects much more compelling than eight years ago:
Longer-term changes preceding the coronavirus pandemic:
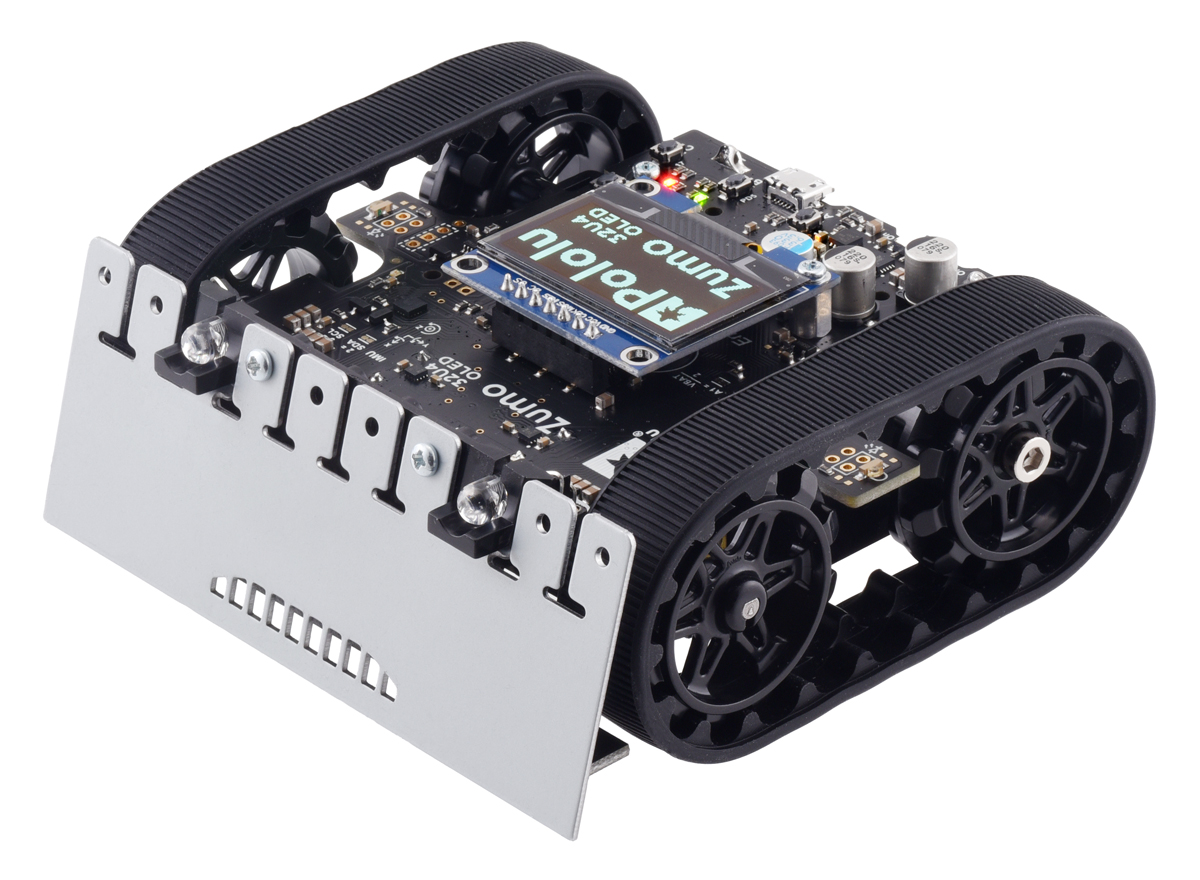
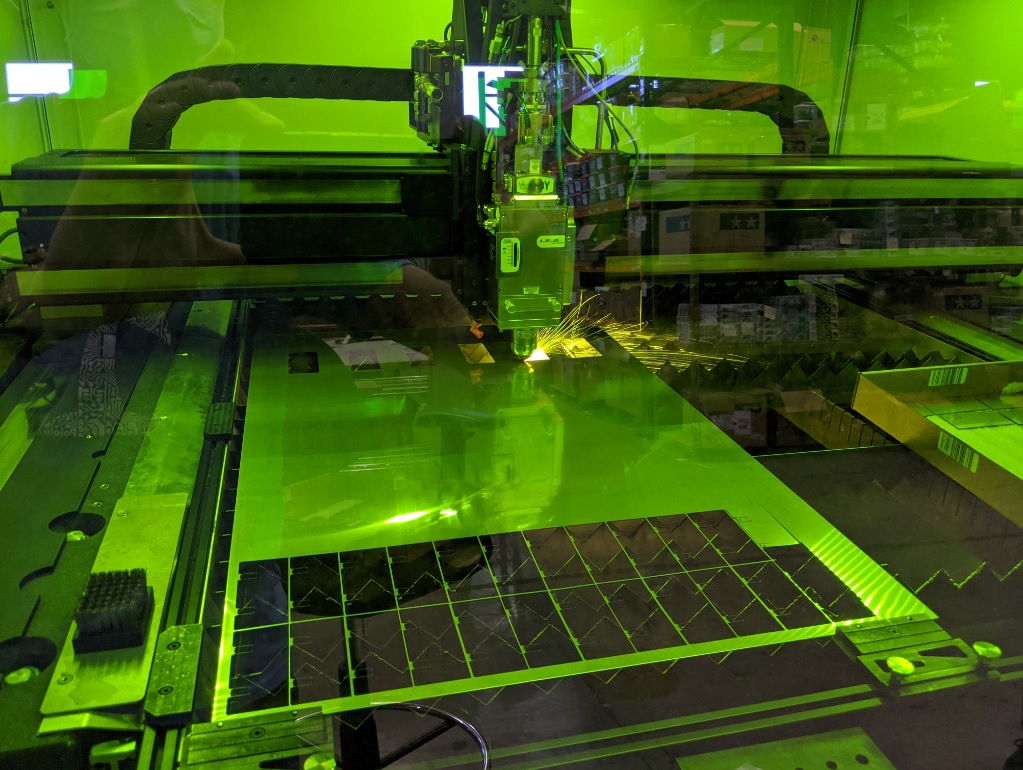 |
Laser cutting Zumo blades at Pololu on 22 April 2020. |
|---|
- Pololu’s manufacturing capabilities and sophistication have improved substantially over the past 8 years. (I still believe that open-source hardware makes more business sense for those with manufacturing capability since competitive advantages would move from product design to production capability, which is more difficult to copy.)
- Copies of our products and documentation and other IP have become a big problem. Even in cases where there might not have been outright fraud intended (e.g. counterfeits being falsely sold as products made by Pololu), consumers of knock-offs take up our support staff time, introduce confusion and uncertainty among customers who have genuine versions of our products, and generally dilute the value of our brand. At least for some products, it might be more pragmatic to officially open up the designs than to fight the copies.
- Our brand and processes and relationships (e.g. with our distributors) and other aspects of being a successful business have grown. This gives us value and competence beyond our designs, so opening them up would be less of giving everything away and undermining our ability to remain in business.
Previously-known arguments for open source that have new weight because of the pandemic:
- Given the increased likelihood that many companies will go out of business, having open-source products can give potential customers more confidence in designing our products into their own products or curriculums. Even if Pololu were to go out of business, at least our designs could get produced somewhere else with less effort than having to design in a new product.
- Employees working on the products might be more motivated to work on them since continued existence of their creations would be less dependent on Pololu continuing to make them.
New arguments for open source specifically because of the coronavirus pandemic.
- Pololu was not particularly well set up for remote workers. While we are working on improving the situation, security and similar concerns might add more friction that would continue to make some kinds of remote work/projects impractical. If they were instead completely open-source projects independent of Pololu, security (as far as keeping designs secret) and supporting external connections to Pololu internal systems would be less of an obstacle.
- We have been soliciting donations to help Pololu survive this crisis. Potential donors might be more encouraged to donate if they had some confidence that they are supporting existence of products and designs that will continue being available even if Pololu were to stop manufacturing them.
- There are now many more people out of work (whether paid or not) around the world who might be open to donating their time and expertise to help on Pololu projects.
- There are now many more students at home or recent graduates without jobs or internships that could especially benefit from looking at or contributing to our designs.
- The pandemic has increased awareness about potential benefits of manufacturing locally, or at least being less dependent on one region or country. Perhaps that will alleviate some of the price pressure that makes it more difficult to open up designs (if you have to compete with the cheapest place in the world to make something, it’s harder to just give them your design).
In short, the heightened uncertainty about business collapses, shortage of money, and physical separation/decentralization that the coronavirus crisis is forcing on us all substantially tip the balance in favor of moving toward more open source projects in organizations like Pololu.
I would appreciate any advice or thoughts any of you have on the topic. Here a few areas you might be able to comment on:
- What do you think in general?
- I am considering specific product-based fundraising campaigns in which we could open up some existing products after exceeding some donation threshold; how does that sound?
- Are there some existing open-source projects that you would like Pololu to start contributing to or manufacturing?
- What’s the latest on open source hardware, in terms of standard licenses, business models, examples, etc? (I generally feel like I hear about open source hardware less than I did 8 years ago, and that there have been some notable disappointments/sell-outs that have dampened the movement, but perhaps I just have not been paying as much attention.)
- What are the best open-source software tools for electronic CAD and mechanical CAD?
- Are there notable recent success stories in terms of open-source physical products?
- Are there any notable examples of companies or organizations attempting to produce open-source physical products?
Thank you for your continued support, everybody! We are working hard to be worthy of it and to do our part to make things better.
Related products


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










