Pololu Metal DC Gearmotors » Micro Metal Gearmotors » 6V Medium-Power (MP) Micro Metal Gearmotors »
1000:1 Micro Metal Gearmotor MP 6V

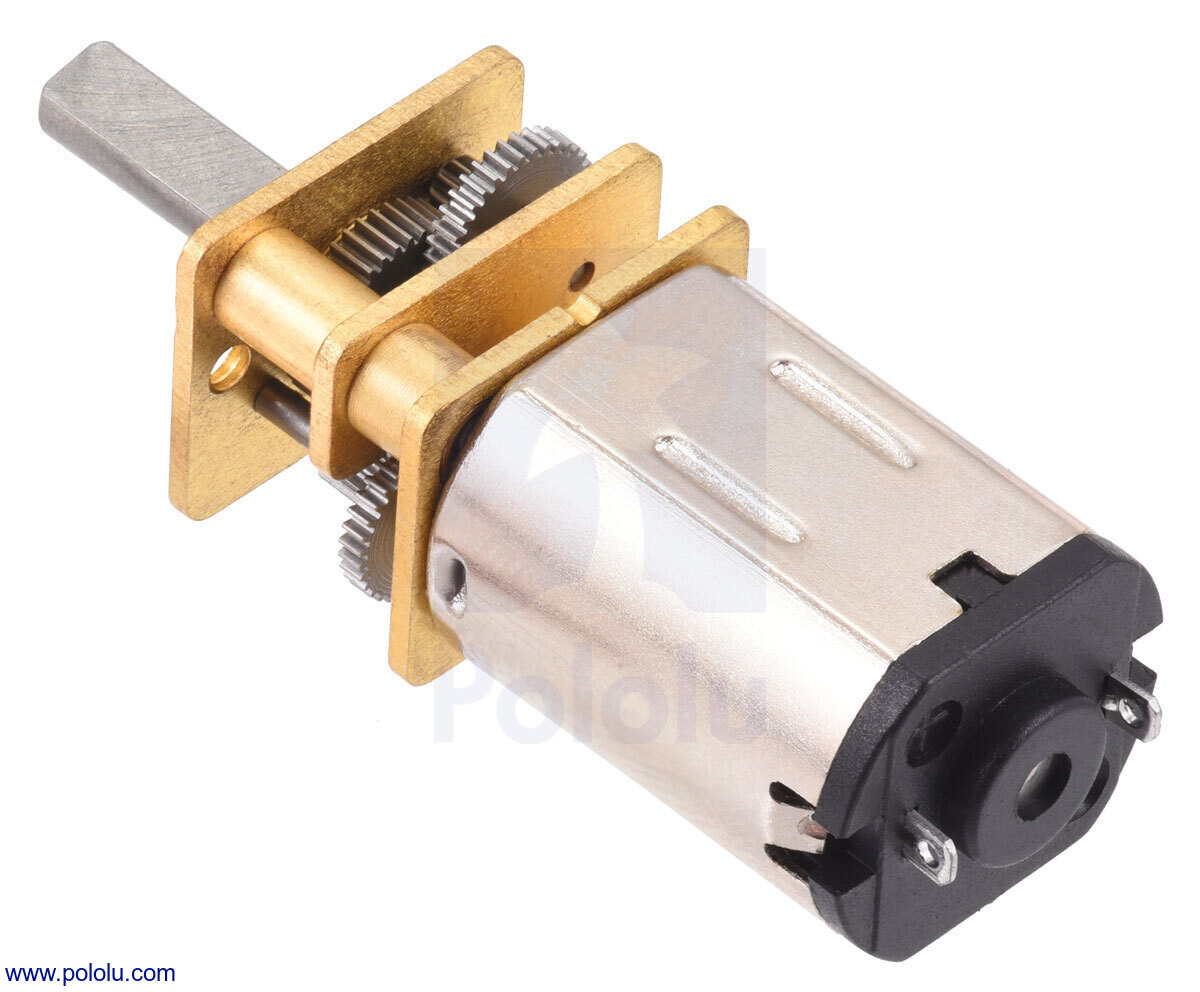
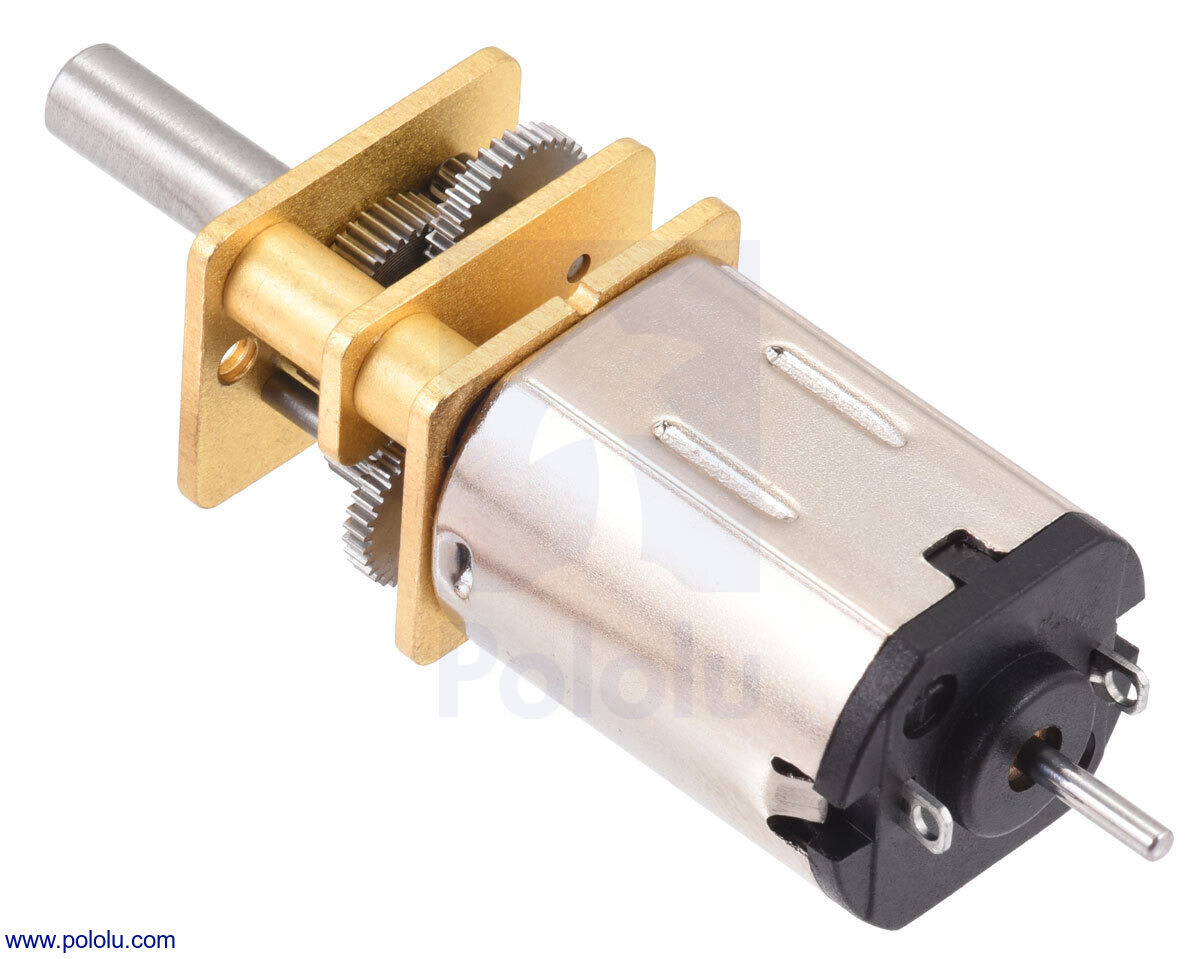
This is a miniature brushed DC metal gearmotor with a gearbox cross section of 10×12 mm and a 9 mm long, 3 mm diameter D-shaped gearbox output shaft.
| motor/brush type | gearbox | encoder | |
|---|---|---|---|
| MP 6V: medium-power 6V with precious metal brushes | 986.41:1 with brass plates | no encoder | |
| voltage | no-load performance | stall extrapolation* |
|---|---|---|
| 6 V | 22 RPM, 70 mA | 6.7 kg⋅cm (93 oz⋅in), 0.67 A |
| * Note: Stall torque and stall current specifications are theoretical values; stalls could damage the motor or gearbox. | ||
Alternatives available with variations in these parameter(s): gear ratio motor type encoder Select variant…
 Compare all products in 6V Medium-Power (MP) Micro Metal Gearmotors.
Compare all products in 6V Medium-Power (MP) Micro Metal Gearmotors.
| Description | Specs (15) | Pictures (17) | Resources (3) | FAQs (2) | On the blog (1) | Distributors (38) |
|---|
Overview
Our Micro Metal Gearmotor family consists of tiny brushed DC metal gearmotors with nitride-hardened martensitic stainless steel gears in a wide range of gear ratios, motor windings, brushes, and encoder configurations:
 |
Micro Metal Gearmotor next to a US quarter dollar for size reference. |
|---|
| Gear ratio options | Motor winding/brush options | Encoder options |
|---|---|---|
|
|
|
The following comparison table shows basic specifications for all of the available versions (see the Micro Metal Gearmotor datasheet (5MB pdf) for additional information, including detailed performance graphs):
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
 No Encoder |
 w/ Extended Motor Shaft |
 w/ Encoder, Back Conn. |
 w/ Encoder, Side Conn. |
|
|---|---|---|---|---|---|---|---|---|---|---|---|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HPCB 12V (high-power, carbon brushes) |
|||||||||||
| 12 V | 0.75 A | 100 mA | 6800 | 0.09 | 1.3 | – | 5:1 | #3036 | #3047 | #5204 | #5205 |
| 80 mA | 3400 | 0.17 | 2.4 | 1.5 | 10:1 | #3037 | #3048 | #5206 | #5207 | ||
| 2200 | 0.25 | 3.5 | 1.4 | 15:1 | #4788 | #4789 | #5208 | #5209 | |||
| 1100 | 0.39 | 5.4 | 1.1 | 30:1 | #3038 | #3049 | #5210 | #5211 | |||
| 650 | 0.67 | 9.3 | 1.1 | 50:1 | #3039 | #3050 | #5212 | #5213 | |||
| 450 | 1.0 | 14 | 1.1 | 75:1 | #3040 | #3051 | #5214 | #5215 | |||
| 330 | 1.3 | 18 | 1.1 | 100:1 | #3041 | #3052 | #5216 | #5217 | |||
| 220 | 1.8 | 25 | 1.0 | 150:1 | #3042 | #3053 | #5218 | #5219 | |||
| 160 | 2.5 | 35 | 1.0 | 210:1 | #3043 | #3054 | #5220 | #5221 | |||
| 130 | 3.0 | 42 | 1.1 | 250:1 | #3044 | #3055 | #5222 | #5223 | |||
| 110 | 3.3 | 46 | 1.0 | 298:1 | #3045 | #3056 | #5224 | #5225 | |||
| 85 | 5.0 | 69 | 1.1 | 380:1 | #4798 | #4799 | #5226 | #5227 | |||
| 35 | 10 | 140 | – | 1000:1 | #3046 | #3057 | #5228 | #5229 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HPCB 6V (high-power, carbon brushes) |
|||||||||||
| 6 V | 1.5 A | 170 mA | 6500 | 0.09 | 1.3 | – | 5:1 | #3060 | #3082 | #5178 | #5179 |
| 150 mA | 3300 | 0.17 | 2.4 | 1.3 | 10:1 | #3061 | #3071 | #5180 | #5181 | ||
| 2100 | 0.25 | 3.5 | 1.3 | 15:1 | #4786 | #4787 | #5182 | #5183 | |||
| 1100 | 0.45 | 6.2 | 1.2 | 30:1 | #3062 | #3072 | #5184 | #5185 | |||
| 650 | 0.74 | 10 | 1.2 | 50:1 | #3063 | #3073 | #5186 | #5187 | |||
| 430 | 1.1 | 15 | 1.3 | 75:1 | #3064 | #3074 | #5188 | #5189 | |||
| 330 | 1.6 | 22 | 1.3 | 100:1 | #3065 | #3075 | #5190 | #5191 | |||
| 220 | 2.0 | 28 | 1.1 | 150:1 | #3066 | #3076 | #5192 | #5193 | |||
| 160 | 2.8 | 39 | 1.1 | 210:1 | #3067 | #3077 | #5194 | #5195 | |||
| 130 | 3.2 | 44 | 1.1 | 250:1 | #3068 | #3078 | #5196 | #5197 | |||
| 110 | 3.4 | 47 | 1.0 | 298:1 | #3069 | #3079 | #5198 | #5199 | |||
| 85 | 5.0 | 69 | 1.1 | 380:1 | #4796 | #4797 | #5200 | #5201 | |||
| 33 | 11 | 150 | – | 1000:1 | #3070 | #3080 | #5202 | #5203 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| HP 6V (high-power) |
|||||||||||
| 6 V | 1.6 A | 120 mA | 6100 | 0.11 | 1.5 | – | 5:1 | #1000 | #2210 | #5152 | #5153 |
| 100 mA | 3100 | 0.22 | 3.0 | 1.6 | 10:1 | #999 | #2211 | #5154 | #5155 | ||
| 2000 | 0.30 | 4.2 | 1.5 | 15:1 | #4784 | #4785 | #5156 | #5157 | |||
| 1000 | 0.57 | 7.9 | 1.5 | 30:1 | #1093 | #2212 | #5158 | #5159 | |||
| 590 | 0.86 | 12 | 1.3 | 50:1 | #998 | #2213 | #5160 | #5161 | |||
| 410 | 1.3 | 18 | 1.4 | 75:1 | #2361 | #2215 | #5162 | #5163 | |||
| 310 | 1.7 | 24 | 1.3 | 100:1 | #1101 | #2214 | #5164 | #5165 | |||
| 210 | 2.4 | 33 | 1.2 | 150:1 | #997 | #2386 | #5166 | #5167 | |||
| 150 | 3.0 | 42 | 1.1 | 210:1 | #996 | #2216 | #5168 | #5169 | |||
| 120 | 3.4 | 47 | 1.1 | 250:1 | #995 | #2217 | #5170 | #5171 | |||
| 100 | 4.0 | 56 | 1.1 | 298:1 | #994 | #2218 | #5172 | #5173 | |||
| 84 | 5.5 | 76 | 1.1 | 380:1 | #4794 | #4795 | #5174 | #5175 | |||
| 31 | 12 | 170 | – | 1000:1 | #1595 | #2373 | #5176 | #5177 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| MP 6V (medium-power) |
|||||||||||
| 6 V | 0.67 A | 80 mA | 4400 | 0.06 | 0.8 | – | 5:1 | #2362 | #2376 | #5126 | #5127 |
| 70 mA | 2200 | 0.11 | 1.5 | – | 10:1 | #2363 | #2377 | #5128 | #5129 | ||
| 1400 | 0.20 | 2.8 | 0.70 | 15:1 | #4782 | #4783 | #5130 | #5131 | |||
| 720 | 0.33 | 4.6 | 0.57 | 30:1 | #2364 | #2378 | #5132 | #5133 | |||
| 420 | 0.54 | 7.5 | 0.55 | 50:1 | #2365 | #2379 | #5134 | #5135 | |||
| 290 | 0.78 | 11 | 0.54 | 75:1 | #2366 | #2380 | #5136 | #5137 | |||
| 220 | 0.94 | 13 | 0.50 | 100:1 | #2367 | #2381 | #5138 | #5139 | |||
| 150 | 1.3 | 18 | 0.48 | 150:1 | #2368 | #2382 | #5140 | #5141 | |||
| 100 | 1.7 | 24 | 0.46 | 210:1 | #2369 | #2383 | #5142 | #5143 | |||
| 88 | 2.2 | 31 | 0.48 | 250:1 | #2370 | #2384 | #5144 | #5145 | |||
| 73 | 2.4 | 33 | 0.44 | 298:1 | #2371 | #2385 | #5146 | #5147 | |||
| 57 | 3.6 | 50 | 0.53 | 380:1 | #4792 | #4793 | #5148 | #5149 | |||
| 22 | 6.7 | 93 | – | 1000:1 | #2372 | #3059 | #5150 | #5151 | |||
| Rated Voltage |
Stall Current |
No-Load Current |
No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Approx Gear Ratio |
No Encoder | w/ Extended Motor Shaft |
w/ Encoder, Back Conn. |
w/ Encoder, Side Conn. |
|
| (kg⋅cm) | (oz⋅in) | ||||||||||
| LP 6V (low-power) |
|||||||||||
| 6 V | 0.36 A | 50 mA | 2500 | 0.05 | 0.7 | – | 5:1 | #1100 | #2200 | #5100 | #5101 |
| 40 mA | 1300 | 0.10 | 1.4 | – | 10:1 | #1099 | #2201 | #5102 | #5103 | ||
| 860 | 0.17 | 2.4 | 0.37 | 15:1 | #4780 | #4781 | #5104 | #5105 | |||
| 450 | 0.29 | 4.0 | 0.31 | 30:1 | #993 | #2202 | #5106 | #5107 | |||
| 270 | 0.44 | 6.1 | 0.29 | 50:1 | #1098 | #2203 | #5108 | #5109 | |||
| 180 | 0.64 | 8.9 | 0.29 | 75:1 | #2360 | #2209 | #5110 | #5111 | |||
| 130 | 0.74 | 10 | 0.25 | 100:1 | #992 | #2204 | #5112 | #5113 | |||
| 90 | 1.1 | 15 | 0.25 | 150:1 | #1097 | #2205 | #5114 | #5115 | |||
| 65 | 1.6 | 22 | 0.25 | 210:1 | #1096 | #2206 | #5116 | #5117 | |||
| 54 | 1.7 | 24 | 0.23 | 250:1 | #1095 | #2207 | #5118 | #5119 | |||
| 45 | 2.0 | 28 | 0.22 | 298:1 | #1094 | #2208 | #5120 | #5121 | |||
| 36 | 2.9 | 40 | 0.27 | 380:1 | #4790 | #4791 | #5122 | #5123 | |||
| 13 | 5.5 | 76 | – | 1000:1 | #1596 | #3058 | #5124 | #5125 | |||
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for instantaneous torque is 2.5 kg⋅cm (35 oz⋅in) for the 380:1 and 1000:1 gearboxes, and 2 kg⋅cm (25 oz⋅in) for all the other gear ratios; we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes, especially for the versions that use high-power (HP and HPCB) motors; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
In general, these kinds of motors can run at voltages above and below their nominal voltages; lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
Motor windings/brush options
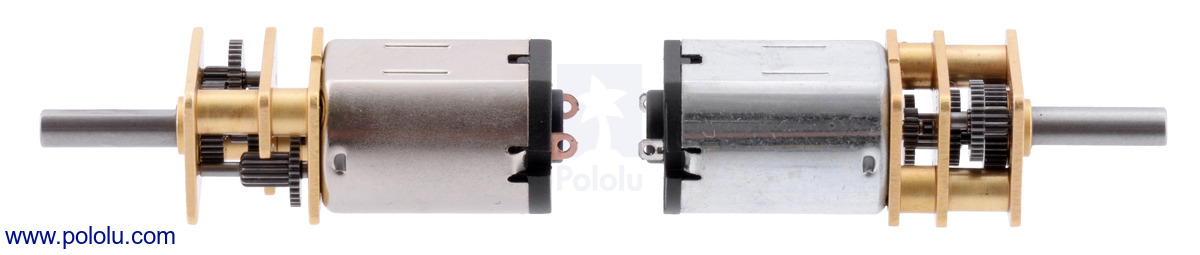
The 6V and 12V HPCB motors have long-life carbon brushes, and they offer the same performance at their respective nominal voltages, just with the 12 V motor drawing half the current of the 6 V motor. The 6V HP, MP, and LP motors have shorter-life precious metal brushes, which are generally lower-friction than carbon brushes and preferred for lower-current applications. The HPCB versions (shown on the left in the picture below) can be differentiated from versions with precious metal brushes (shown on the right) by their copper-colored terminals. Note that the HPCB terminals are 0.5 mm wider than those on the other Micro Metal Gearmotor versions (2 mm vs. 1.5 mm), and they are about 1 mm closer together (6 mm vs. 7 mm).
 |
 |
Micro Metal Gearmotor HPCB long-life carbon brushes (left) next to Micro Metal Gearmotor HP precious metal brushes (right). |
|---|
Encoder options
|
|
|
|
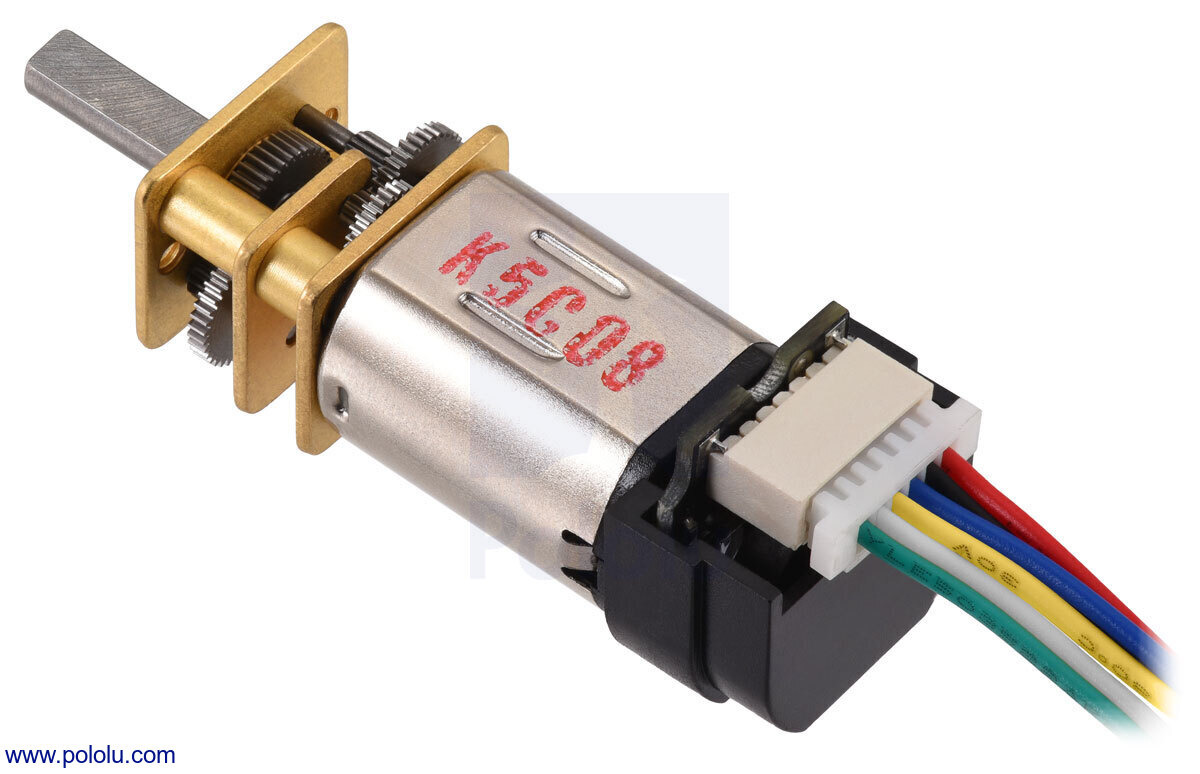
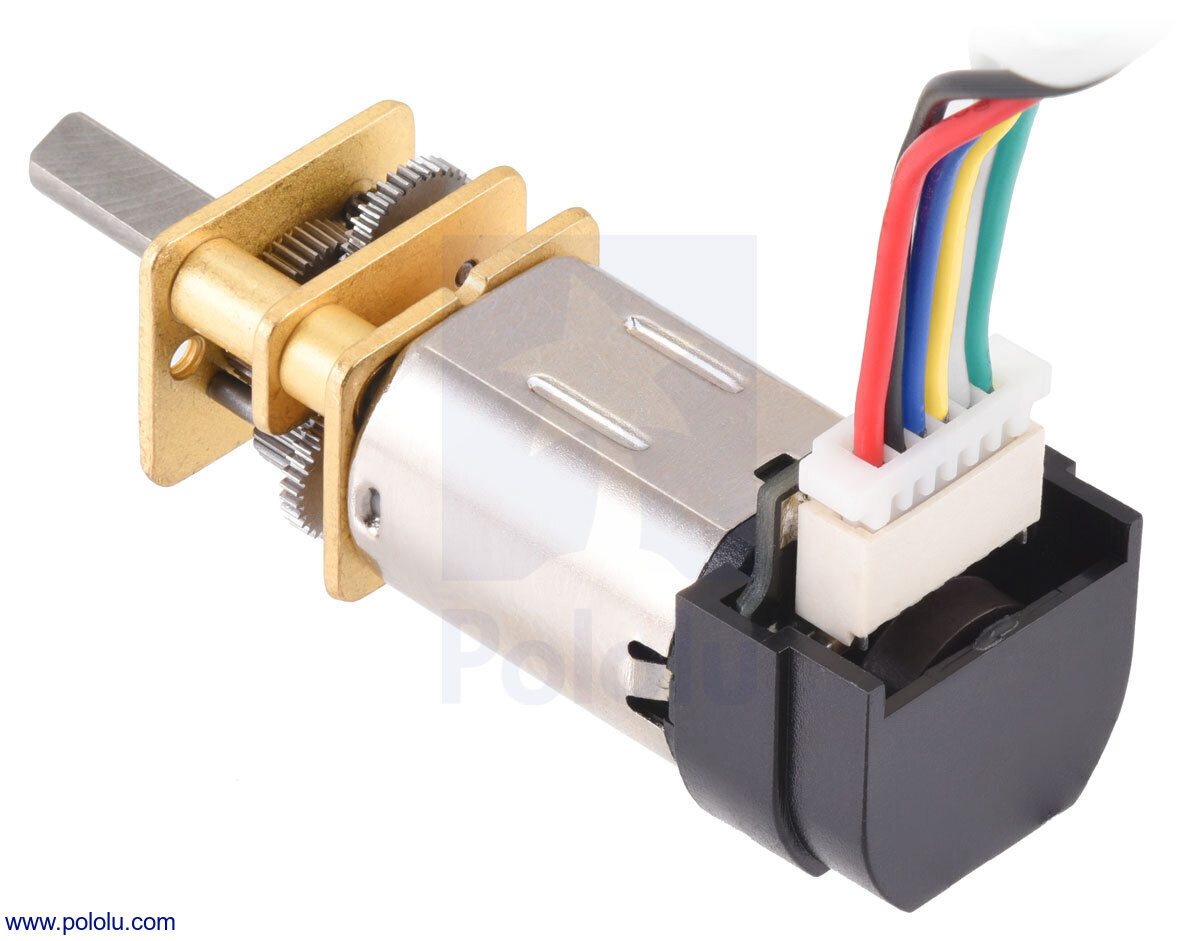
In addition to standard versions that are not intended for use with encoders, we have versions of our Micro Metal Gearmotors available with integrated 12 CPR quadrature encoders on the motor shafts (i.e. on the inputs to the gearbox). These are available in two styles—back connector and side connector—and work with our assortment of 6-pin JST SH-style cables and 6-pin JST SH-style connector boards (cables are not included). A plastic snap-on housing covers the encoder disc and electronics.
We also have motor versions available with an extended motor shaft for adding your own encoder. This 1 mm diameter shaft extends 4.5 mm from the rear of the motor and rotates at the same speed as the input to the gearbox. These versions work with our separately available encoders for Micro Metal Gearmotors.
Gearbox options
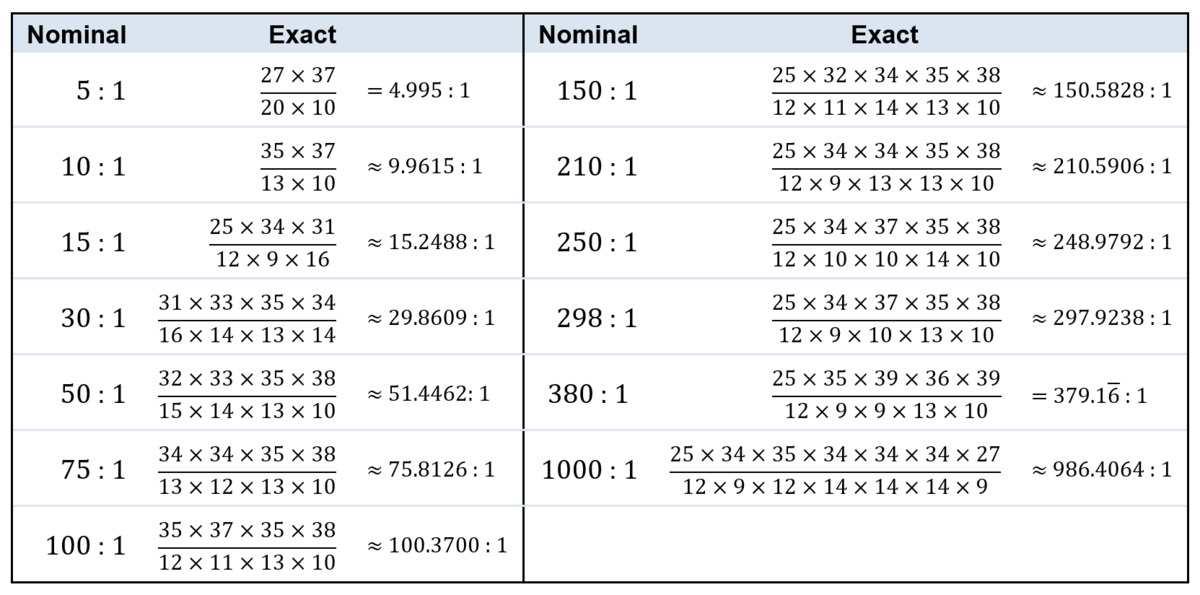
The table below shows the exact gear ratios for our Micro Metal Gearmotors. All gearboxes have the same overall dimensions except for 1000:1, which is 3.5 mm longer than the others. The gearboxes use brass plates on all versions except 380:1, which has steel plates for increased durability and resistance to wear from radial loads.
 |
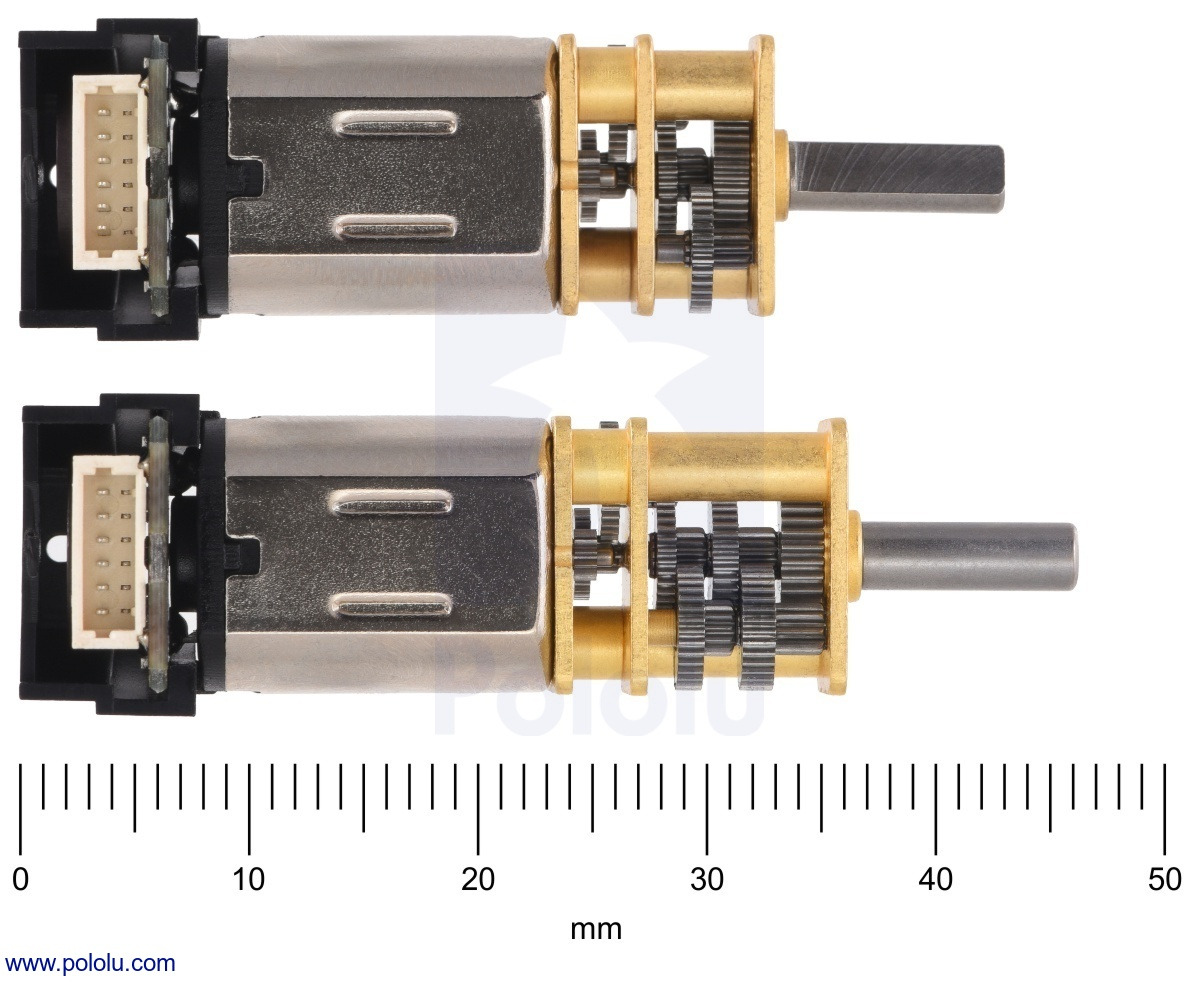 |
Micro Metal Gearmotor size comparison of 1000:1 (bottom) vs other gear ratios (top). |
|---|
Please note that the higher gear ratios can generate enough torque to damage themselves if exposed to loads beyond what they are rated for (25 kg⋅mm for 1000:1 and 380:1, 20 kg⋅mm for everything else). The point of these higher gear ratios is not to deliver more overall torque but rather to allow for slower speeds at a given voltage and to draw less current for a given torque within its rated operating range.
Dimensions
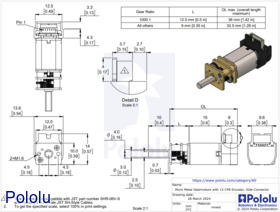
Our Micro Metal Gearmotors all have gearboxes with a 10 × 12 mm cross section and a 9 mm-long, 3 mm-diameter D-shaped gearbox output shaft. The gearbox length is the same for all gear ratios except 1000:1, which is 3.5 mm longer than the others. On versions without an encoder, the motor fits entirely within the 10 × 12 mm gearbox cross section. The two encoder options fit within the gearbox cross section on the side opposite the connector and extend past it by 3 mm or 4 mm on the connector side, depending on the connector orientation; for the other two sides, the encoder extends past the gearbox cross section by 0.25 mm.
In terms of size, these gearmotors are very similar to Sanyo’s popular 12 mm NA4S DC gearmotors, and gearmotors with this form factor are sometimes also referred to as N20 motors. The versions with carbon brushes (HPCB) have slightly different terminal and end-cap dimensions than the versions with precious metal brushes, but all of the other dimensions are identical.
See our detailed dimension diagrams (635k pdf) for more information.
Details for item #2372
|
1000:1 Micro Metal Gearmotor. |
|---|
Gearmotor details:
| motor/brush type | gearbox | encoder | |
|---|---|---|---|
| MP 6V: medium-power 6V with precious metal brushes | 986.41:1 with brass plates | no encoder | |
Key specifications:
| voltage | no-load performance | stall extrapolation* |
|---|---|---|
| 6 V | 22 RPM, 70 mA | 6.7 kg⋅cm (93 oz⋅in), 0.67 A |
| * Note: Stall torque and stall current specifications are theoretical values; stalls could damage the motor or gearbox. | ||
Exact gear ratio: ``(25×34×35×34×34×34×27) / (12×9×12×14×14×14×9) ~~ bb(986.41:1)``
Motor Accessories
- Wheels and hubs: The Micro Metal Gearmotor’s output shaft matches our assortment of Pololu wheels for 3mm shafts. You can also use our Pololu universal mounting hubs to mount custom wheels and mechanism to the Micro Metal Gearmotor’s output shaft, and you can use our 12mm hex wheel adapter to use this motor with many common hobby RC wheels.
 |
Pololu Wheel 32×7mm on a Micro Metal Gearmotor. |
|---|
 |
Black Pololu Wheel 70×8mm on a Pololu Micro Metal Gearmotor. |
|---|
 |
A pair of Pololu universal aluminum mounting hubs for 3 mm diameter shafts. |
|---|
 |
12mm Hex Wheel Adapter for 3mm Shaft on a Micro Metal Gearmotor. |
|---|
- Mounting brackets: Our mounting bracket (also available in white) and extended mounting bracket are specifically designed to securely mount the gearmotor while enclosing the exposed gears. We recommend the extended mounting bracket for wheels with recessed hubs, such as the Pololu wheel 42×19mm.
 |
Black micro metal gearmotor mounting bracket pair with included screws and nuts. |
|---|
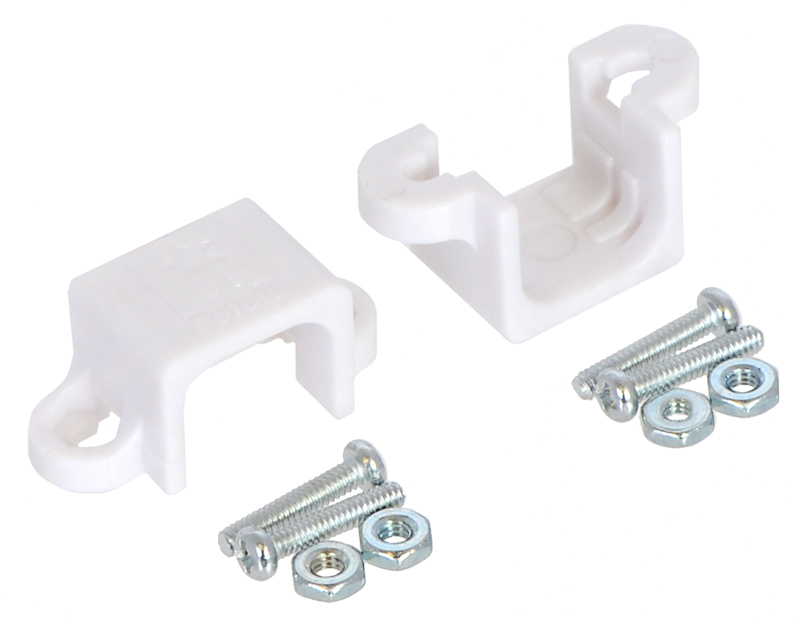 |
White micro metal gearmotor mounting bracket pair with included screws and nuts. |
|---|
 |
Pololu micro metal gearmotor bracket extended with Micro Metal Gearmotor. |
|---|
- Encoders and connector boards: While we have versions of our Micro Metal Gearmotors available with encoders already installed, we also have encoder boards available separately that can be installed on the Micro Metal Gearmotor versions with extended motor shafts. For the single-shaft versions, we have 2-pin connector boards available that work with 2-pin JST SH-style female cables.
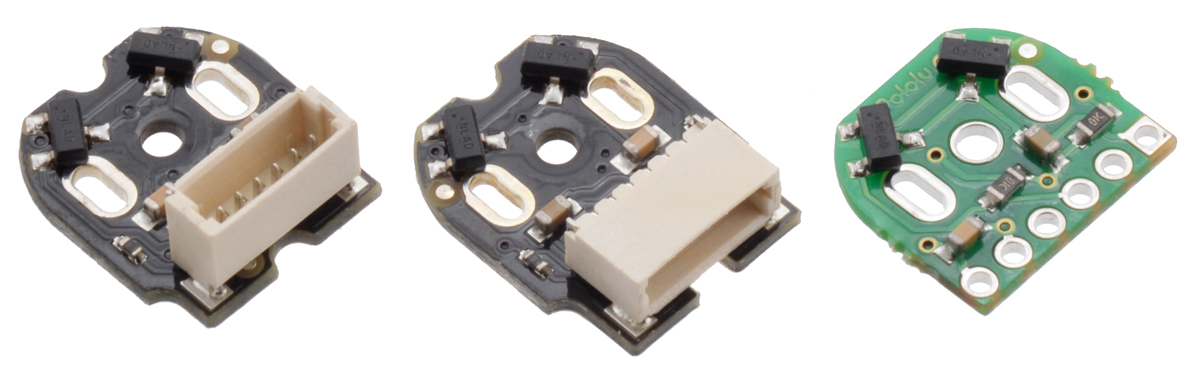 |
Side-by-side comparison of Magnetic Encoder with Top-Entry Connector (left), Side-Entry Connector (center), and 2mm-pitch through-holes (right). |
|---|
 |
Micro Metal Gearmotor with Back-Entry, 2-Pin JST SH-Style Connector Board and cable (cable not included). |
|---|
 |
Micro Metal Gearmotor with Side-Entry, 2-Pin JST SH-Style Connector Board and cable (cable not include). |
|---|
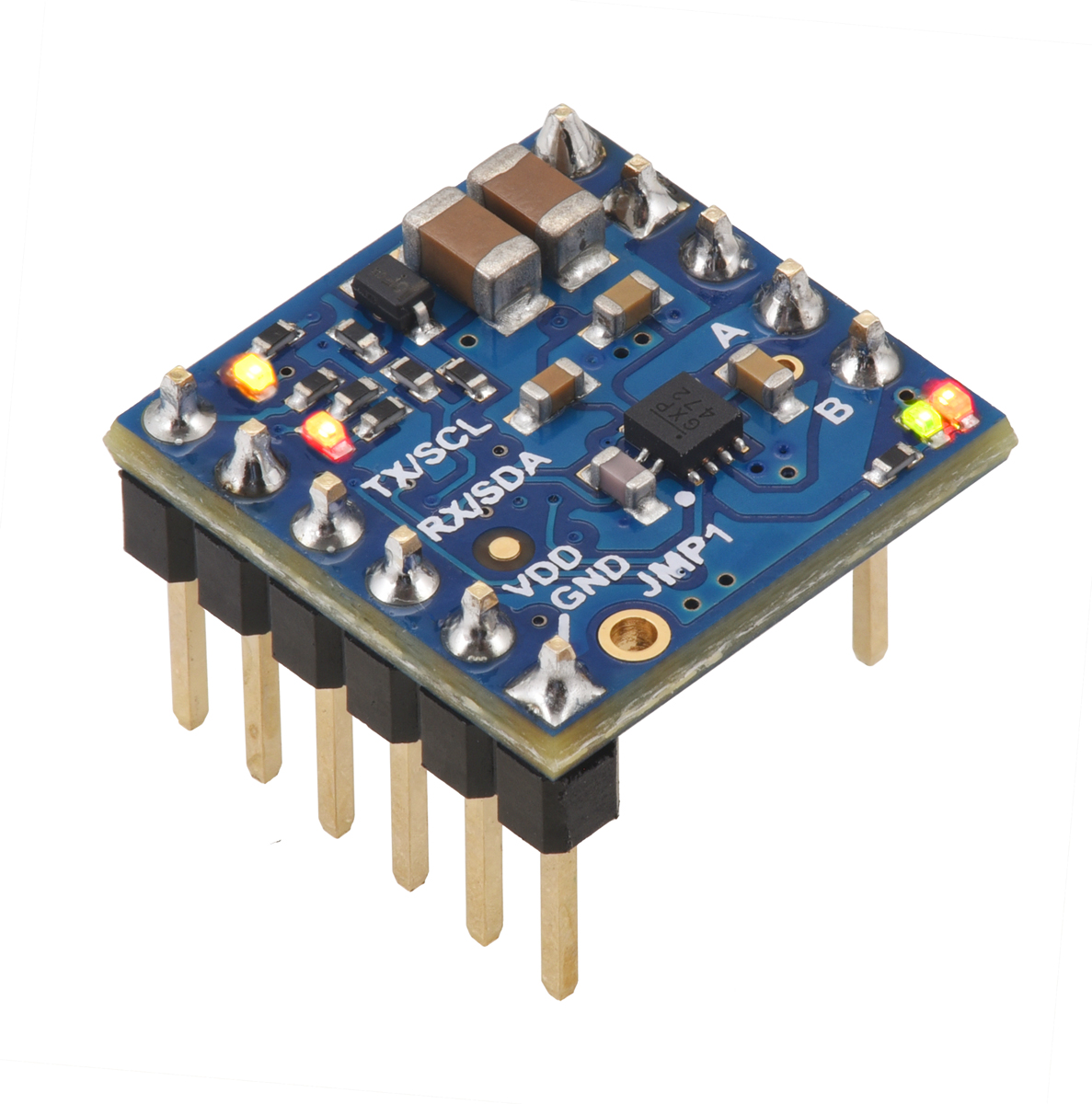
- Motor controllers and drivers: We have a number of motor controllers and motor drivers that can be used to control these Micro Metal Gearmotors. In particular, the MP6550 motor driver is well suited for these motors, as are our Motoron M1x550, M2x550, M3S550, and M3H550 chainable serial motor controllers.
 |
MP6550 Single Brushed DC Motor Driver Carrier. |
|---|
 |
Motoron M1T550/M1U550 Single Motor Controller (Header Pins Soldered). |
|---|
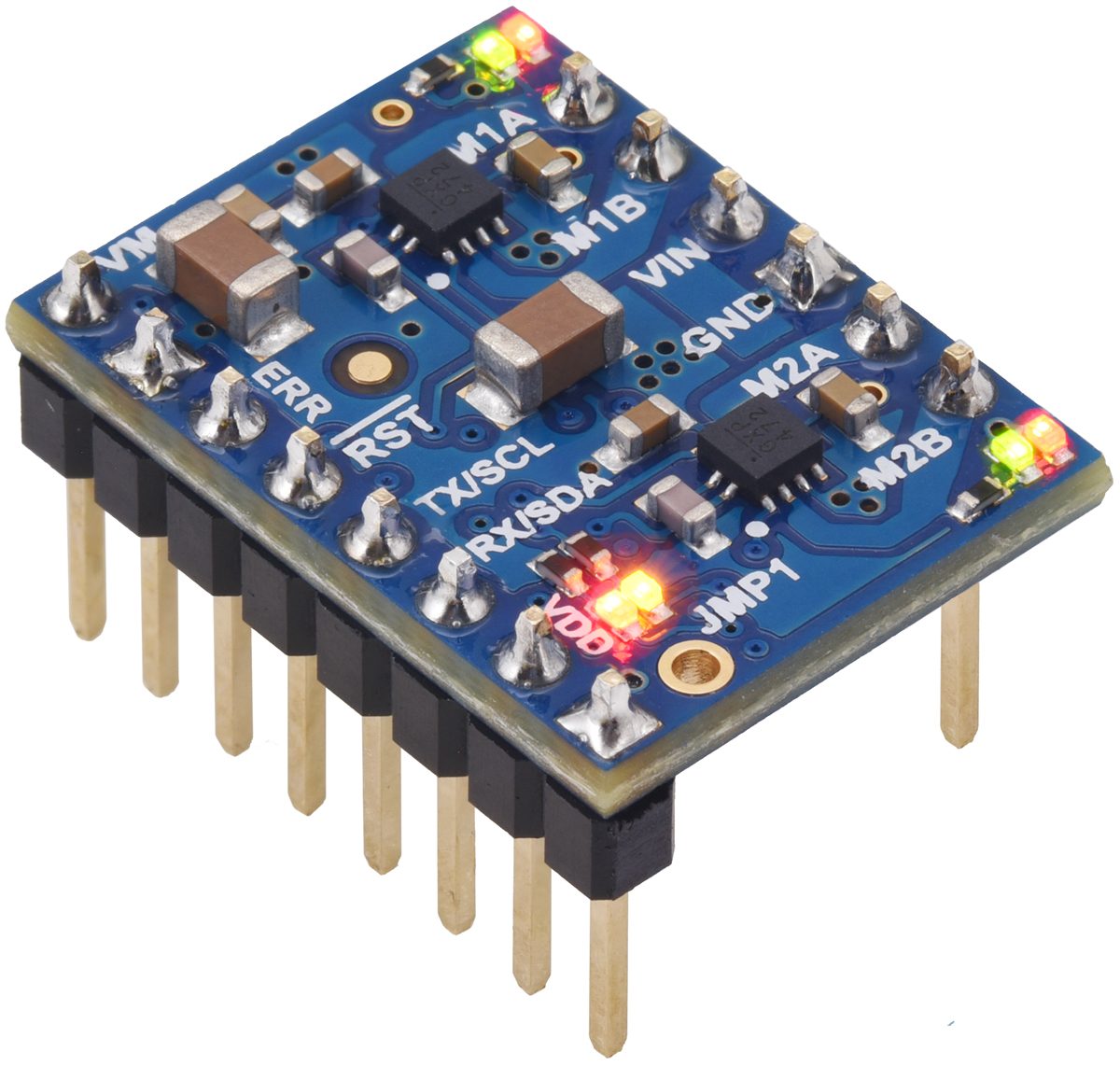 |
Motoron M2T550/M2U550 Dual Motor Controller (Header Pins Soldered). |
|---|
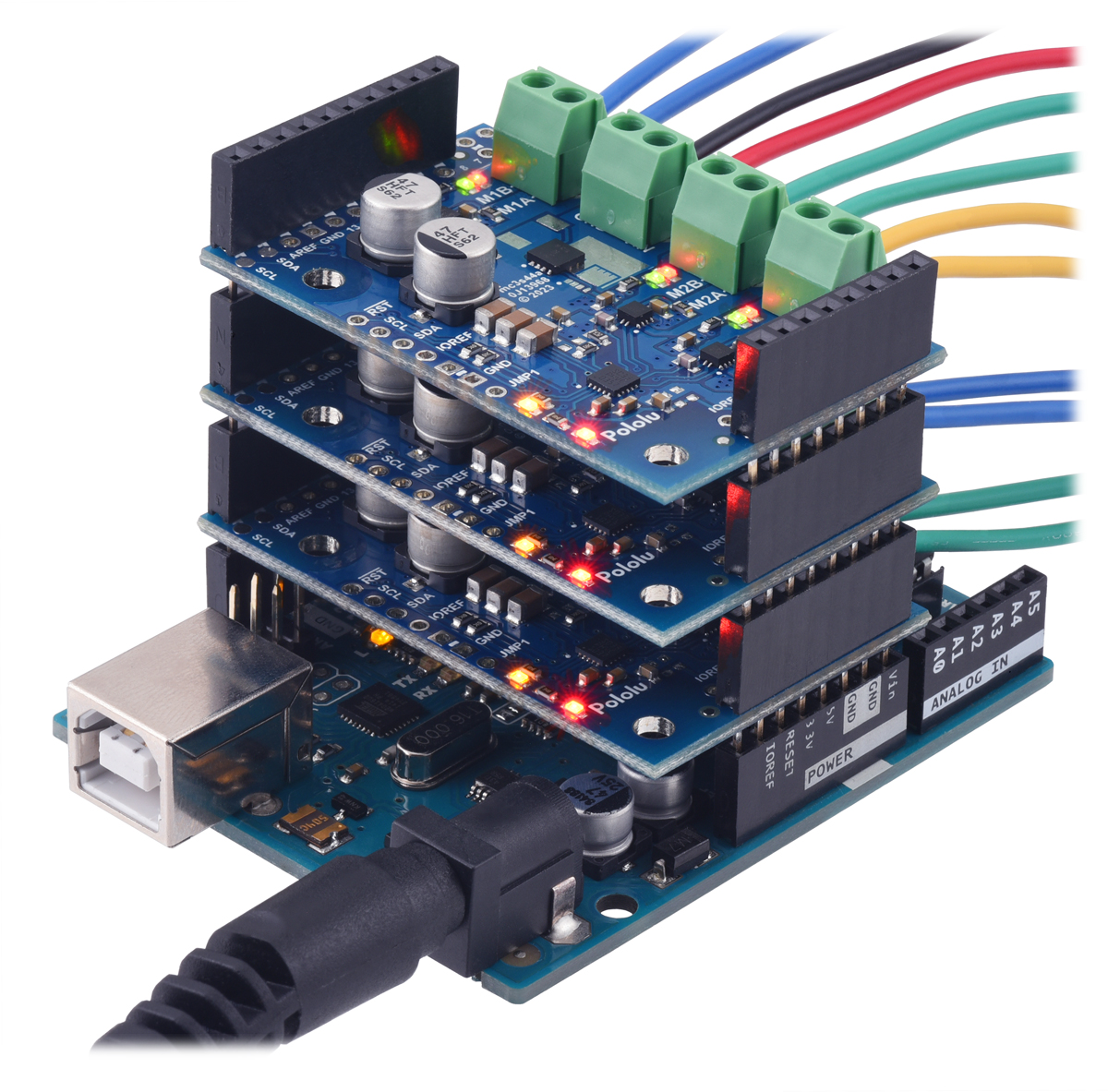 |
Three Motoron M3S550 shields being controlled by an Arduino Uno. |
|---|
- Current sensors: The recommended motor control options above have built-in current sensing, but we also have an assortment of stand-alone Hall effect-based current sensors to choose from:
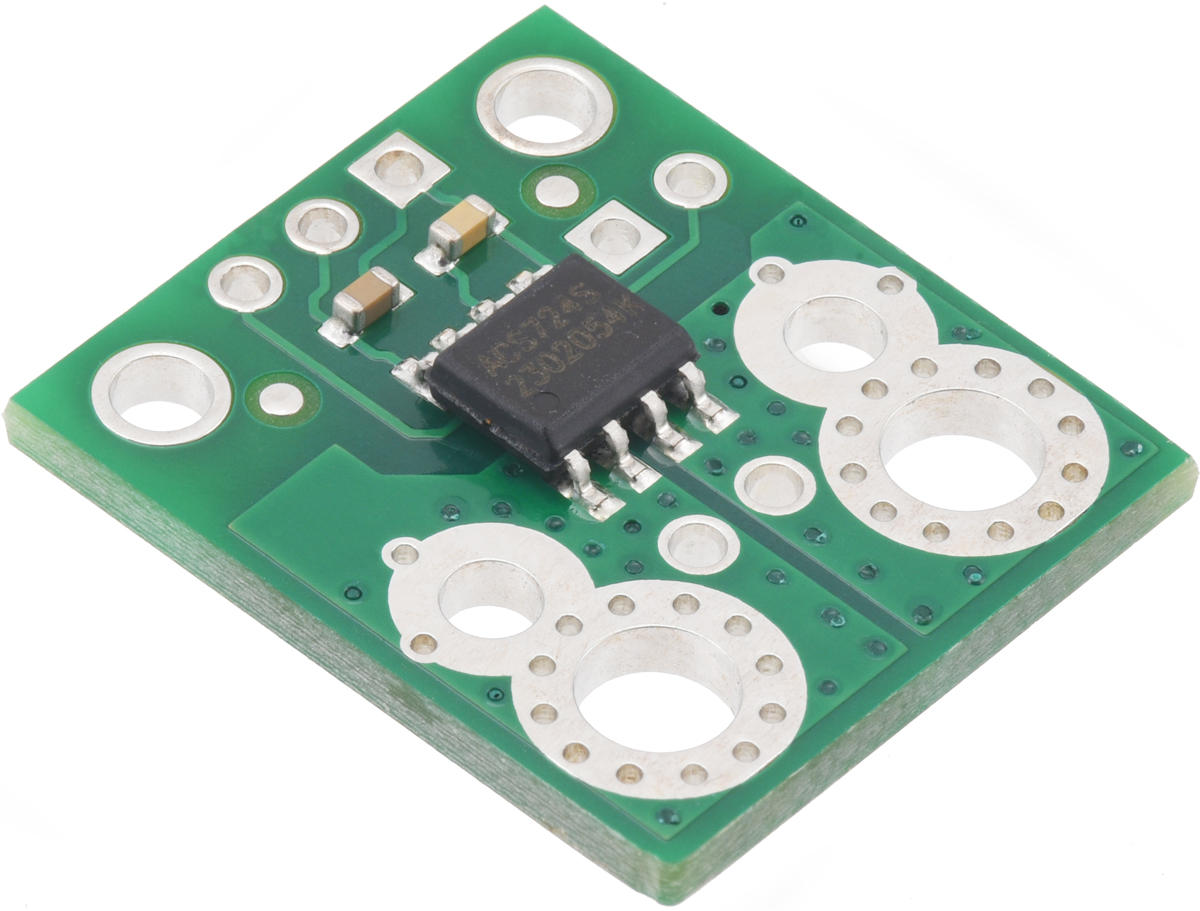 |
ACS724LLCTR-2P5AB Current Sensor Carrier -2.5A to +2.5A. |
|---|
We also incorporate these motors into some of our products, including our Zumo robot and 3pi robot :
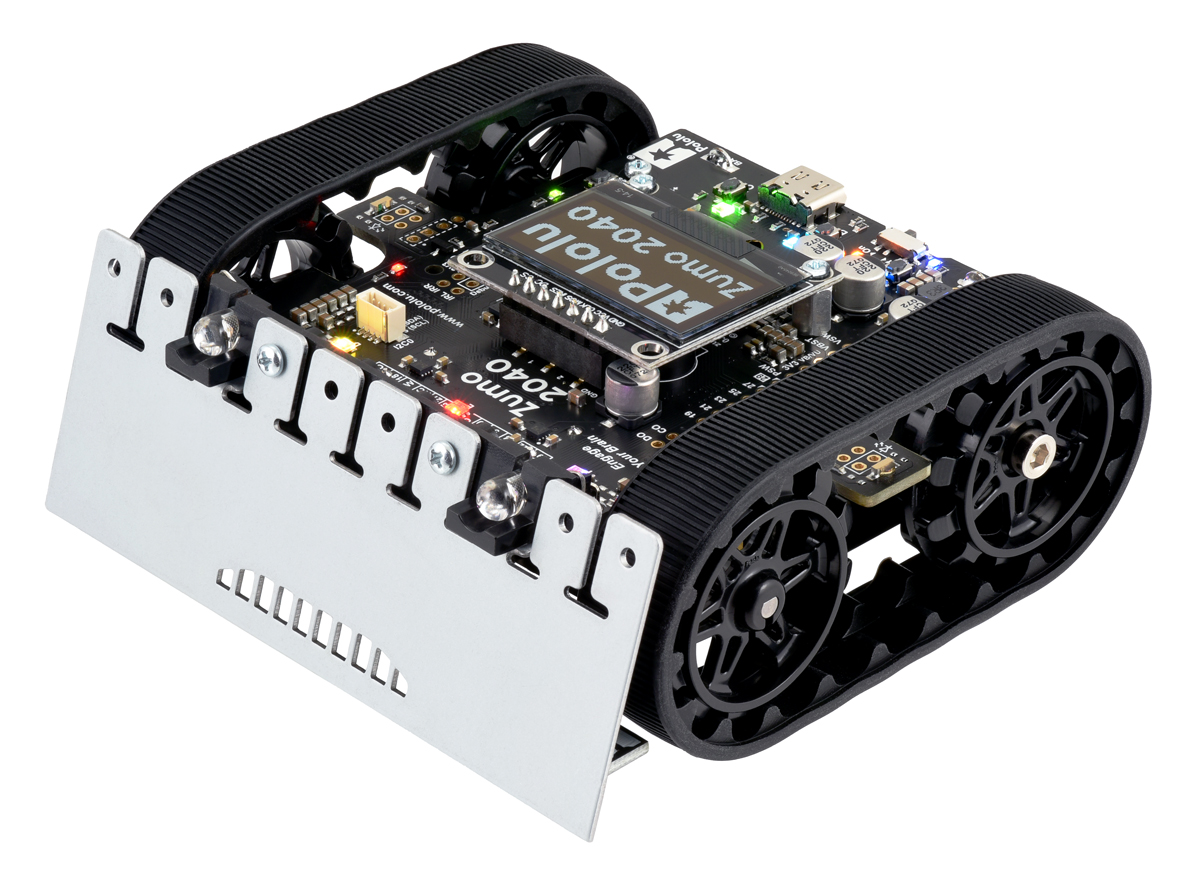 |
Assembled Zumo 2040 robot. |
|---|
 |
3pi+ 2040 Robot. |
|---|
Related products



Related categories
























Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
