Pololu Blog »
Pololu Blog (Page 11)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New products: JST SH-Style cables and connectors for Micro Metal Gearmotor encoders
|
|
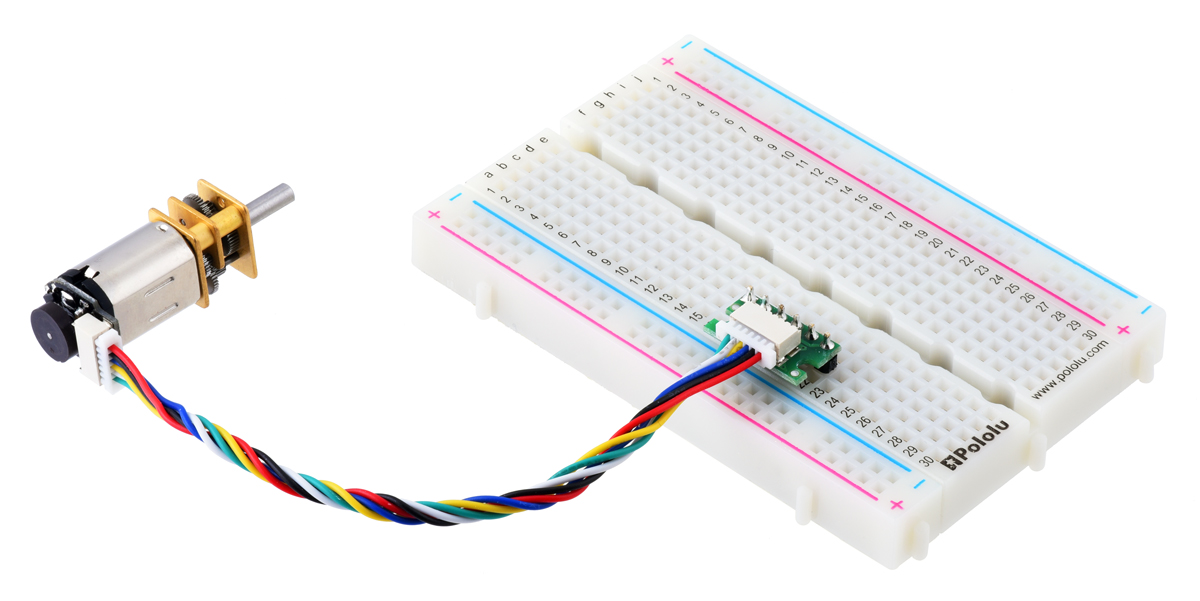
We have expanded our selection of JST SH-style cables and connectors! These cables and connectors are ideal for use with our magnetic encoders for Micro Metal Gearmotors as seen in the photo on the right above.
In addition to the 6-pin single-ended female JST SH-style cables we’ve offered for a while, we now offer 6-pin female-female JST SH-style cables in five different lengths. Here’s the full list of currently available options:
- 6-Pin Female-Female JST SH-Style Cable 10 cm
- 6-Pin Female-Female JST SH-Style Cable 16 cm
- 6-Pin Female-Female JST SH-Style Cable 25 cm
- 6-Pin Female-Female JST SH-Style Cable 40 cm
- 6-Pin Female-Female JST SH-Style Cable 63 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 12 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 30 cm
- 6-Pin Single-Ended Female JST SH-Style Cable 75 cm
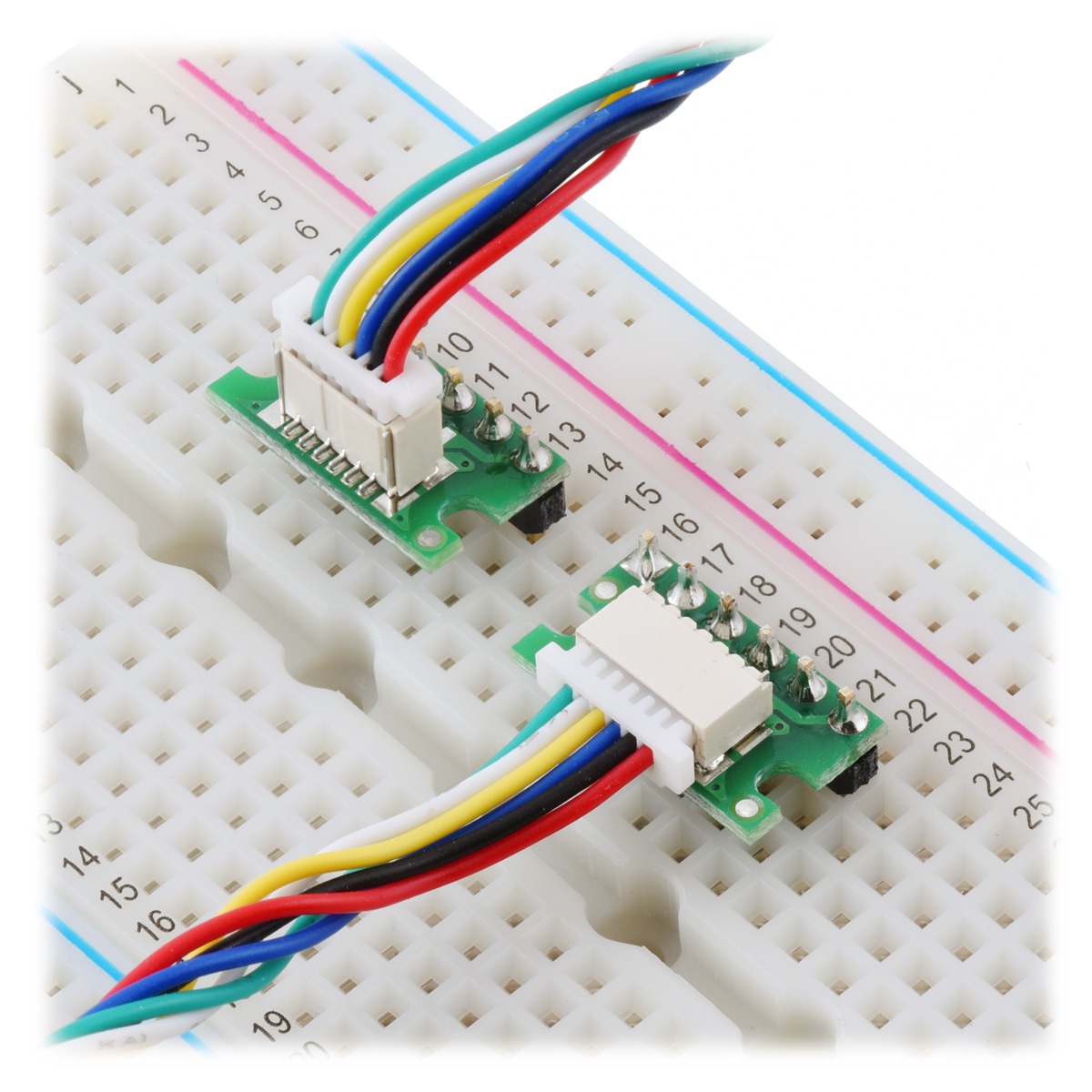
To go along with the new female-female cables, we also have breakout boards available for both the side-entry and top-entry versions of the JST SH-style connector. When used with our encoders and JST cables, these breakout boards offer a convenient way to access the encoder signal and power pins through a breadboard, and the pins are labeled on the board’s bottom silkscreen with this application in mind. Alternatively, these boards can serve as general-purpose breakouts for other applications that do not involve encoders. For example, a pair of connector breakouts with a female-female cable could be used as a removable general-purpose interconnect between different parts of a modular system.
|
|
We are trying something new with how we package and sell these connector boards. At Pololu, all our electronics undergo functional testing, where each product is placed on a custom testing apparatus and checked for functionality. This is a labor intensive step in our production process, and for a product as simple as these connector boards, testing and packaging represent a significant amount of the cost to produce it. As such, we are offering two options for purchasing these connector boards: either fully tested and individually packaged, or an untested pack of three.
|
|

Even though we do not functionally test the discounted 3-packs, each one undergoes automated optical inspection (AOI) to visually check the placement of the connector and the quality of the solder joints. Additionally, each printed circuit board (PCB) is electrically tested by our PCB manufacturer, so we know the PCB itself is free from electrical defects. This makes it very unlikely for any of the breakout boards to be bad.
The additional functional testing we perform on the fully tested units just confirms the solder connections between the connector and the board. If you purchase the untested units but would still like this additional confirmation, you can easily check it yourself with a multimeter. (Just use it to check for continuity between corresponding pins on the actual JST connector and through-holes on the board, and verify that there is no continuity between adjacent pins.) In the unlikely event you receive a unit with a poor or shorted connection, you should be able to touch it up yourself with a soldering iron. So for common applications that require two boards, such as use with a pair of encoders, you have the option of two individually packaged units we have confirmed functional or, for the same price, three units that have passed visual inspection and are very likely to leave you with two functional units plus a spare.
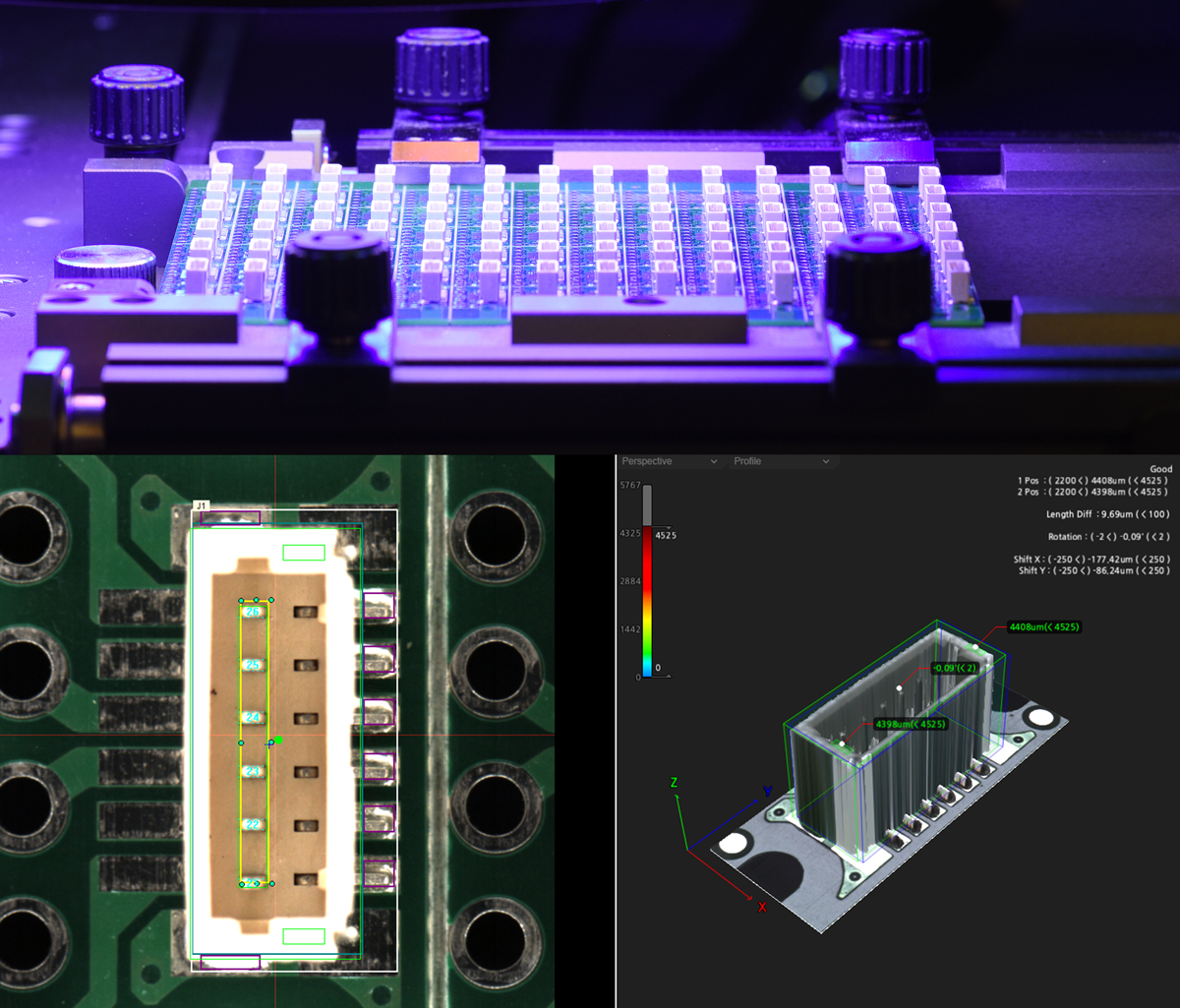 |
All units automatically optically inspected. |
|---|
Here are all of our 6-pin JST SH-style connector options:
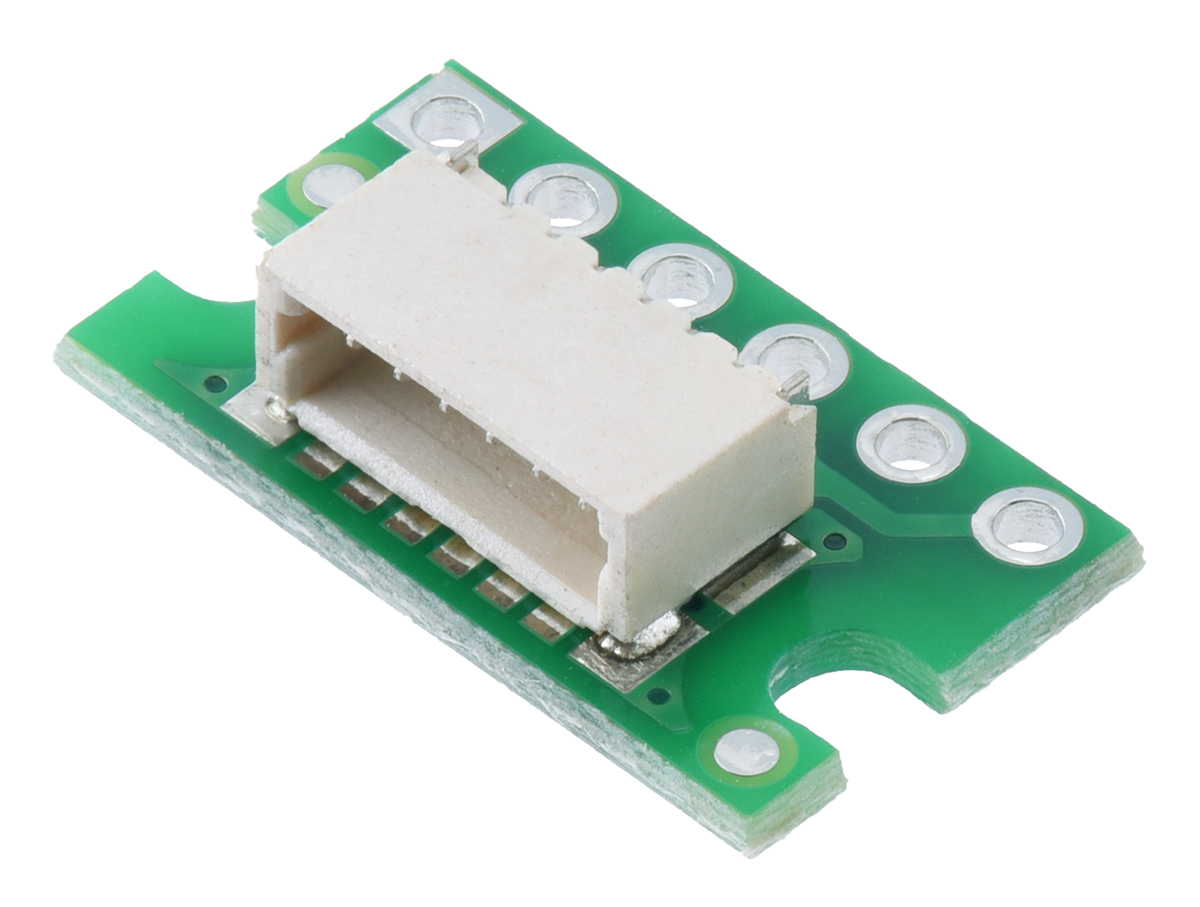
- Breakout for JST SH-Style Connector, 6-Pin Male Top-Entry (Individually Packaged)
- Breakout for JST SH-Style Connector, 6-Pin Male Top-Entry (3-Pack Untested)
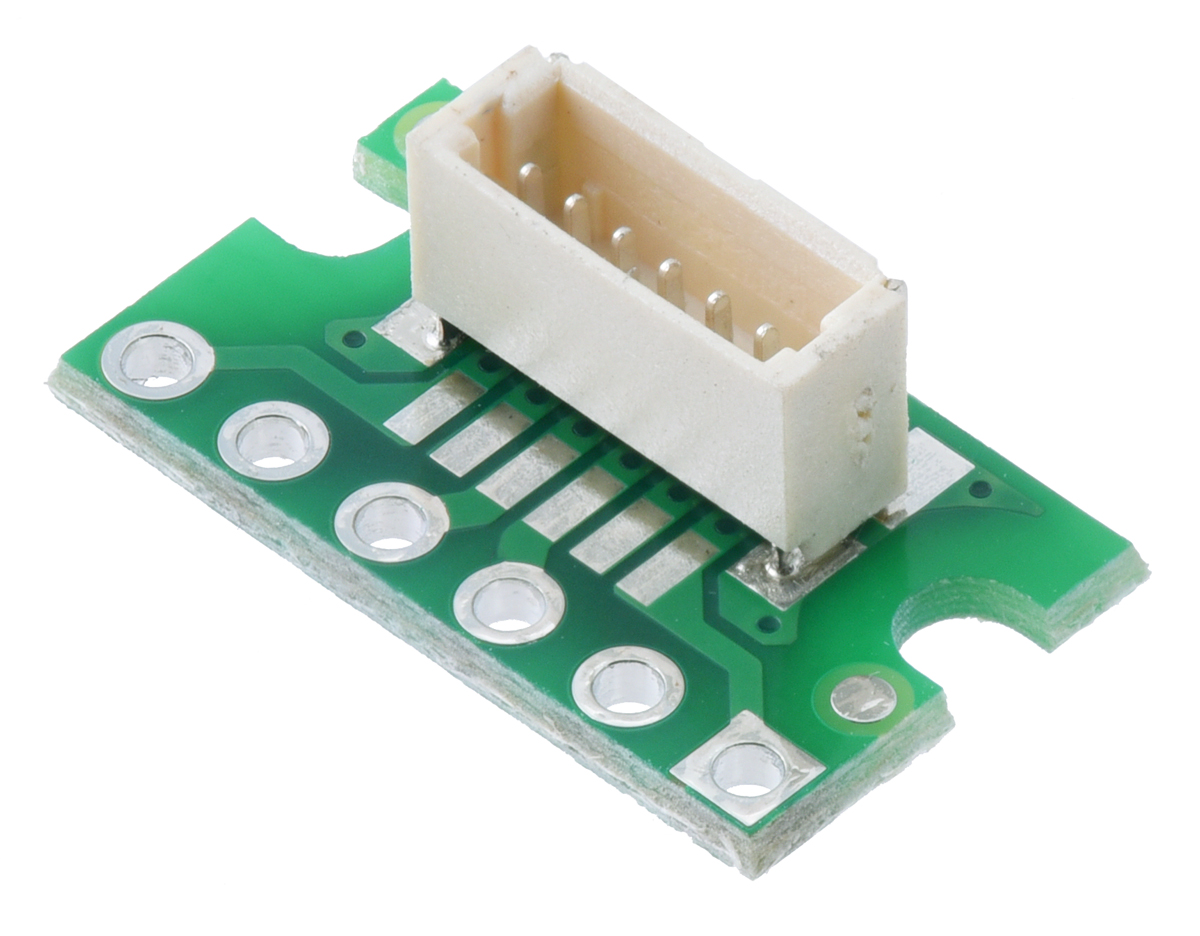
- Breakout for JST SH-Style Connector, 6-Pin Male Side-Entry (Individually Packaged)
- Breakout for JST SH-Style Connector, 6-Pin Male Side-Entry (3-Pack Untested)
All of these cables and connectors and the encoders they are compatible with can be found here. And you can get 15% off the encoders and cables using coupons from our Christmas Sale going on now!
What do you think about this kind of approach where we test something less thoroughly in order to offer it at a lower price? Would you prefer it over the fully tested option? Do you think one option will be more popular than the other? We’d love to hear your thoughts!
Related products














Our Black Friday/Cyber Monday Sale is going on now!

Our Black Friday / Cyber Monday sale is going strong, and we have been working hard to make and ship the products that people are getting great deals on. Most of the sale coupons can be used on backorders if we happen to run out of stock, but you should still get your orders in early since lead times on some popular products can get long.
Please note that our same-day shipping guarantee has been suspended since we started operating with a reduced staff in March due to the COVID-19 pandemic (see Jan’s latest post here), though we will do our best to get your order shipped as fast as we can. Additionally, we are closed Thursday, November 26 (tomorrow) for Thanksgiving. Happy Thanksgiving!
Our newest robot, 3pi+, is here—Arduino-compatible, USB, encoders, full IMU and more!
 |
I am thrilled to announce the release of our newest robot, the 3pi+! This new platform is a major upgrade from the original 3pi robot we introduced twelve years ago. At 97 mm, the diameter is just 1mm larger than the original, and the general concept of a tiny, fast robot powered by four AAA batteries and two micro metal gearmotors remains the same. However, just about everything has been redesigned from the ground up to add the extra features everyone has been asking for.
First off, the 3pi+ is now a platform that encompasses a range of products, not just one particular robot. This is enabled primarily by the chassis now being an independent structure rather than being a specific circuit board with motors strapped on:
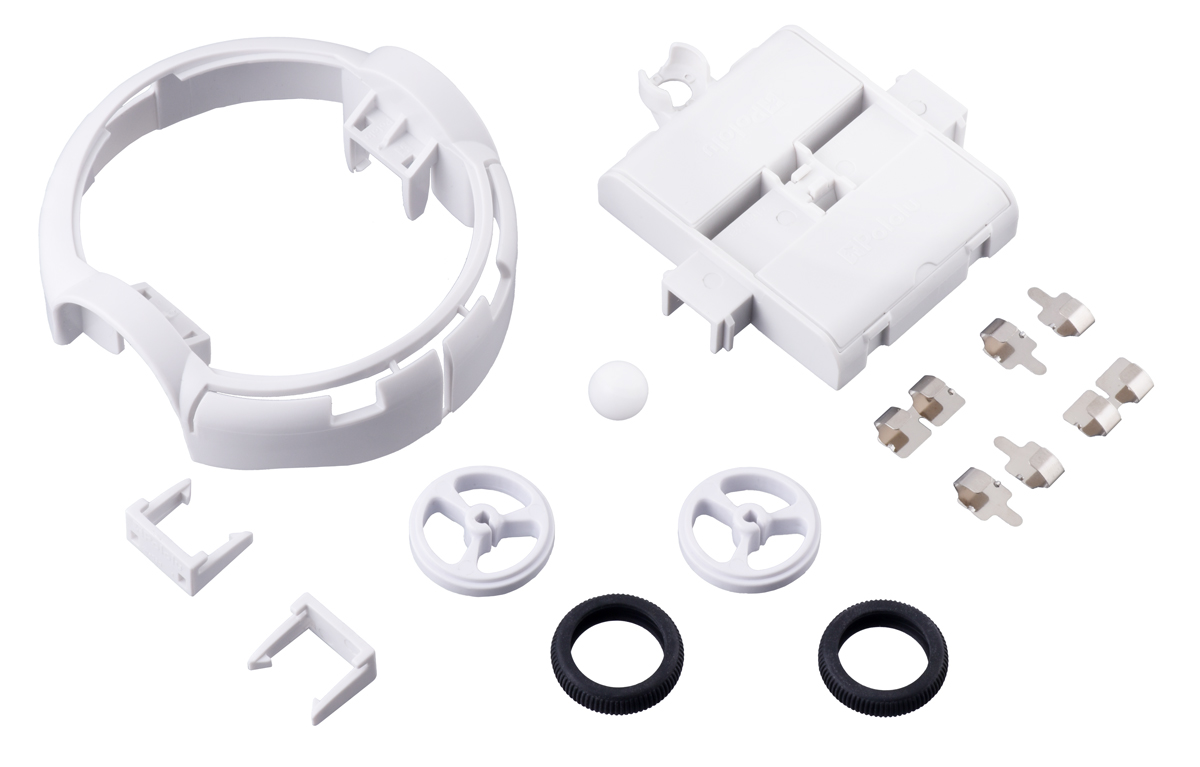 |
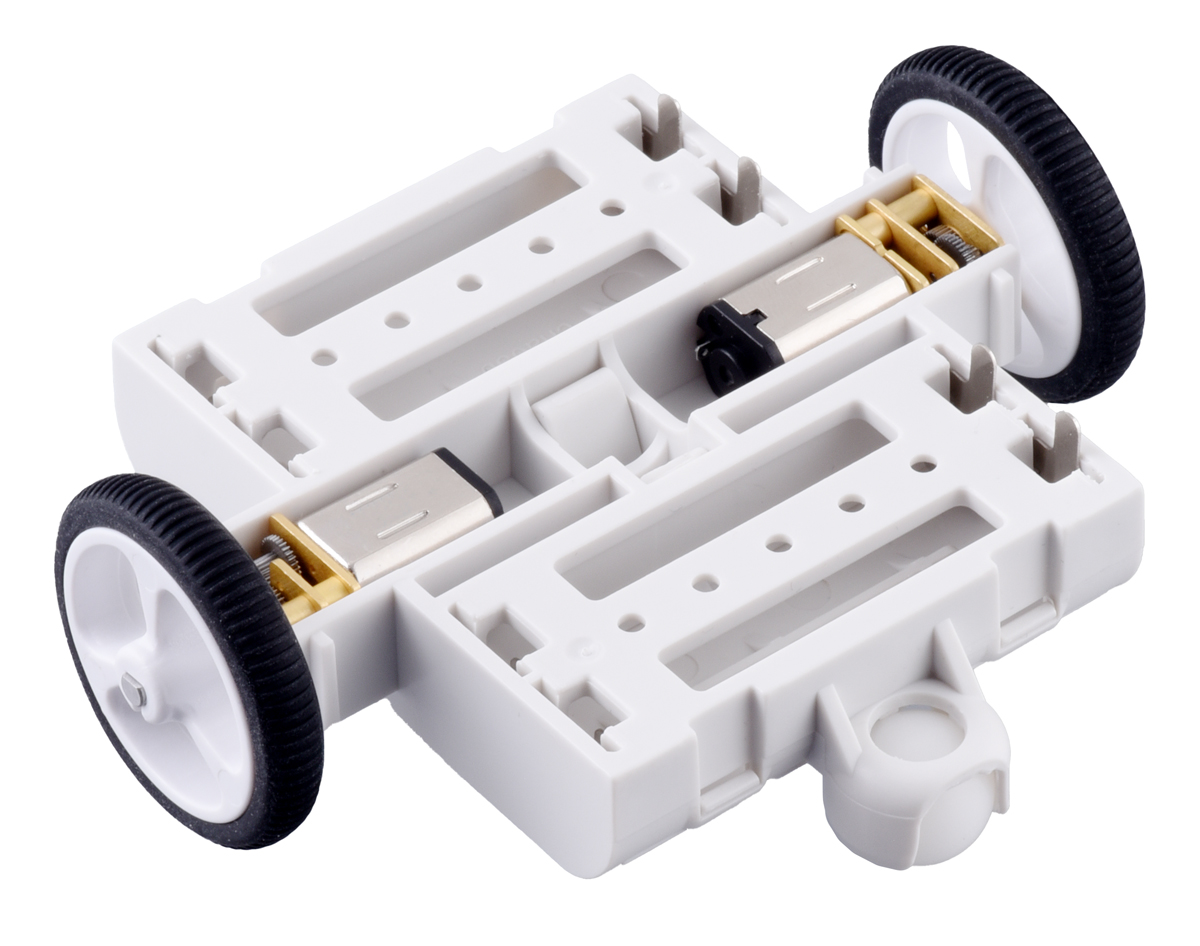
3pi+ Chassis Kit (No Motors or Electronics). |
|---|
|
|
|


|
|
|
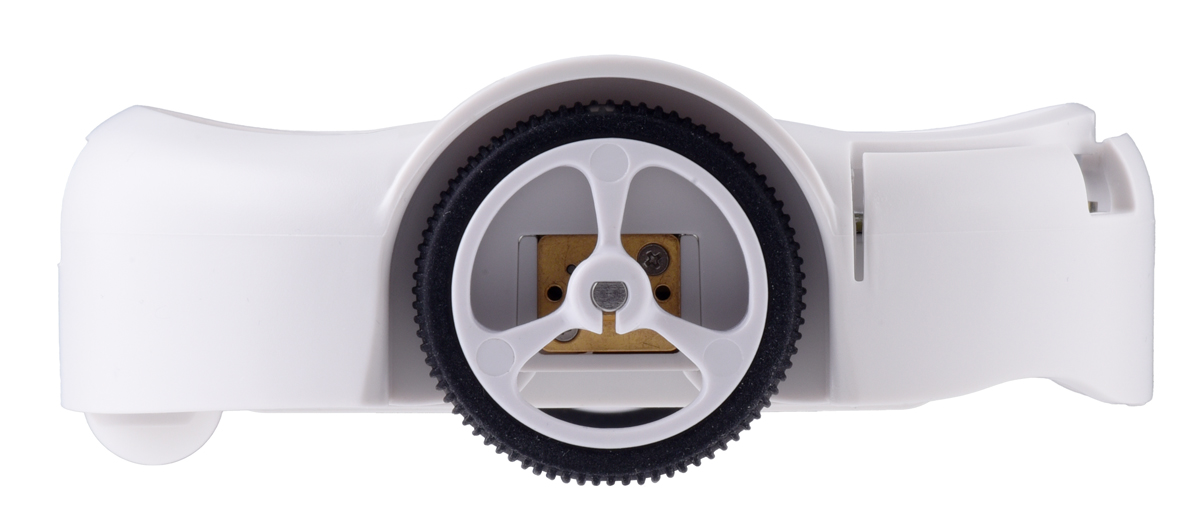


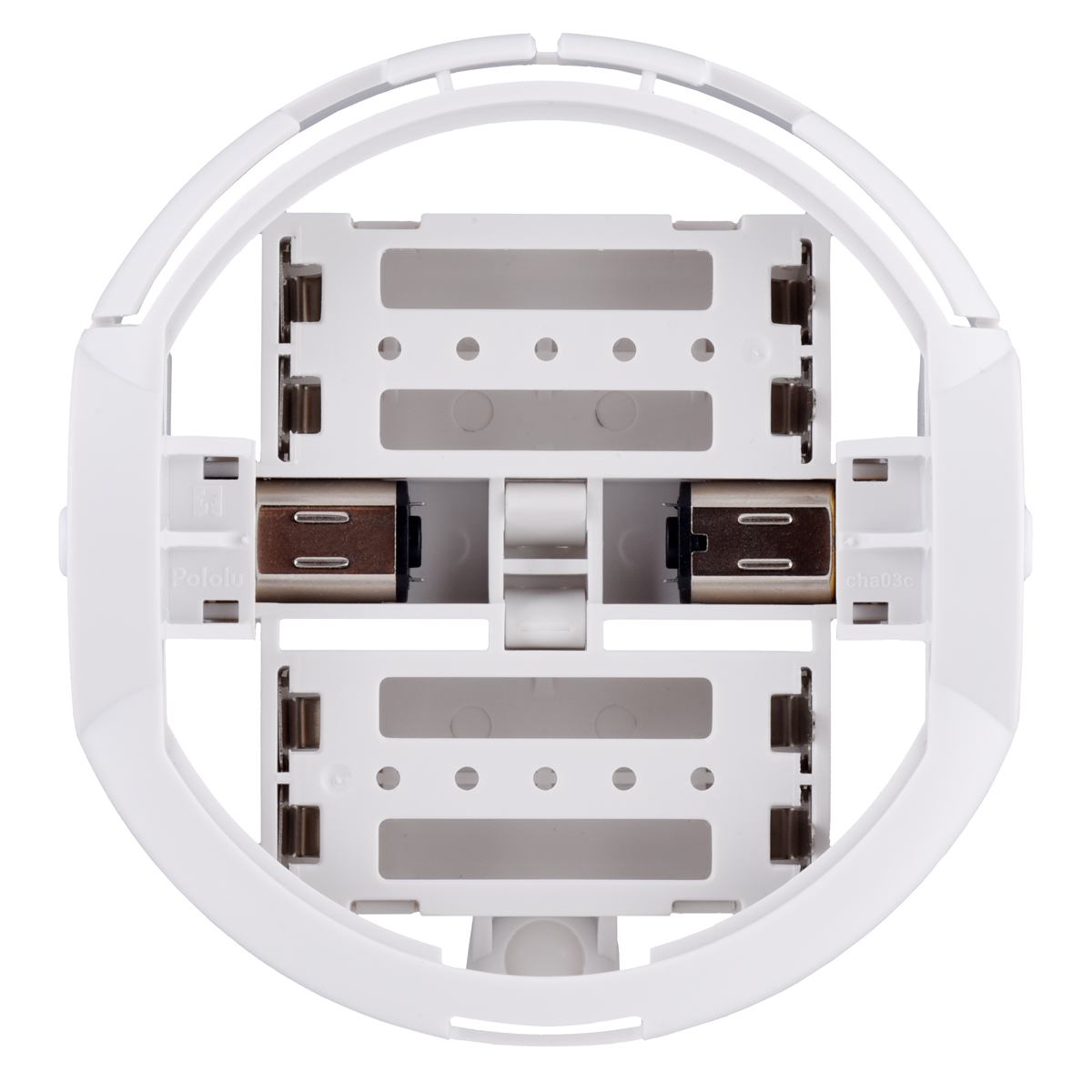
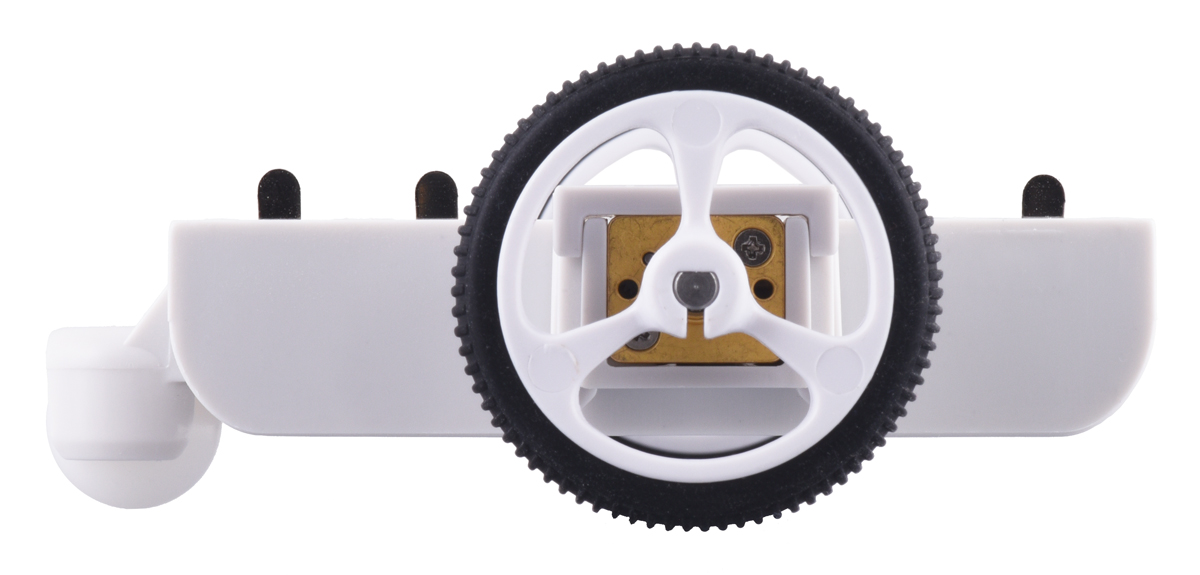
The chassis incorporates the battery holders, motor mounts, and ball caster. An outer bumper skirt is removable and the motors can instead be held in by separate clips (also included in the kit). The left-most picture shows the chassis with motors installed but without the bumper skirt or motor clips, and the next two pictures show the motor clips installed:
|
|
|

Making the chassis separate from any electronics means that you can use it with your own electronics and that we can make various versions with different capabilities and microcontrollers.
3pi+ 32U4
The first full 3pi+ robot we are launching is the 3pi+ 32U4, which is based on an Arduino-compatible ATmega32U4 microcontroller from Microchip (formerly from Atmel). Like the original 3pi, the 3pi+ 32U4 has five integrated downward-looking reflectance sensors, making the robot a great starting point for line following and line-maze events.
The 3pi+ 32U4 offers many major improvements over the original 3pi, including:
- ATmega32U4 microcontroller with Arduino-compatible bootloader can be programmed directly through a USB connection
- Quadrature encoders on both motors for closed-loop position and speed control
- Full 9-axis IMU (three-axis gyro, accelerometer, and compass)
- Bottom-loading battery holders keep batteries accessible even if additional levels are added
- Full wrap-around bumper to protect electronics from collisions
- Two bump sensors on the front
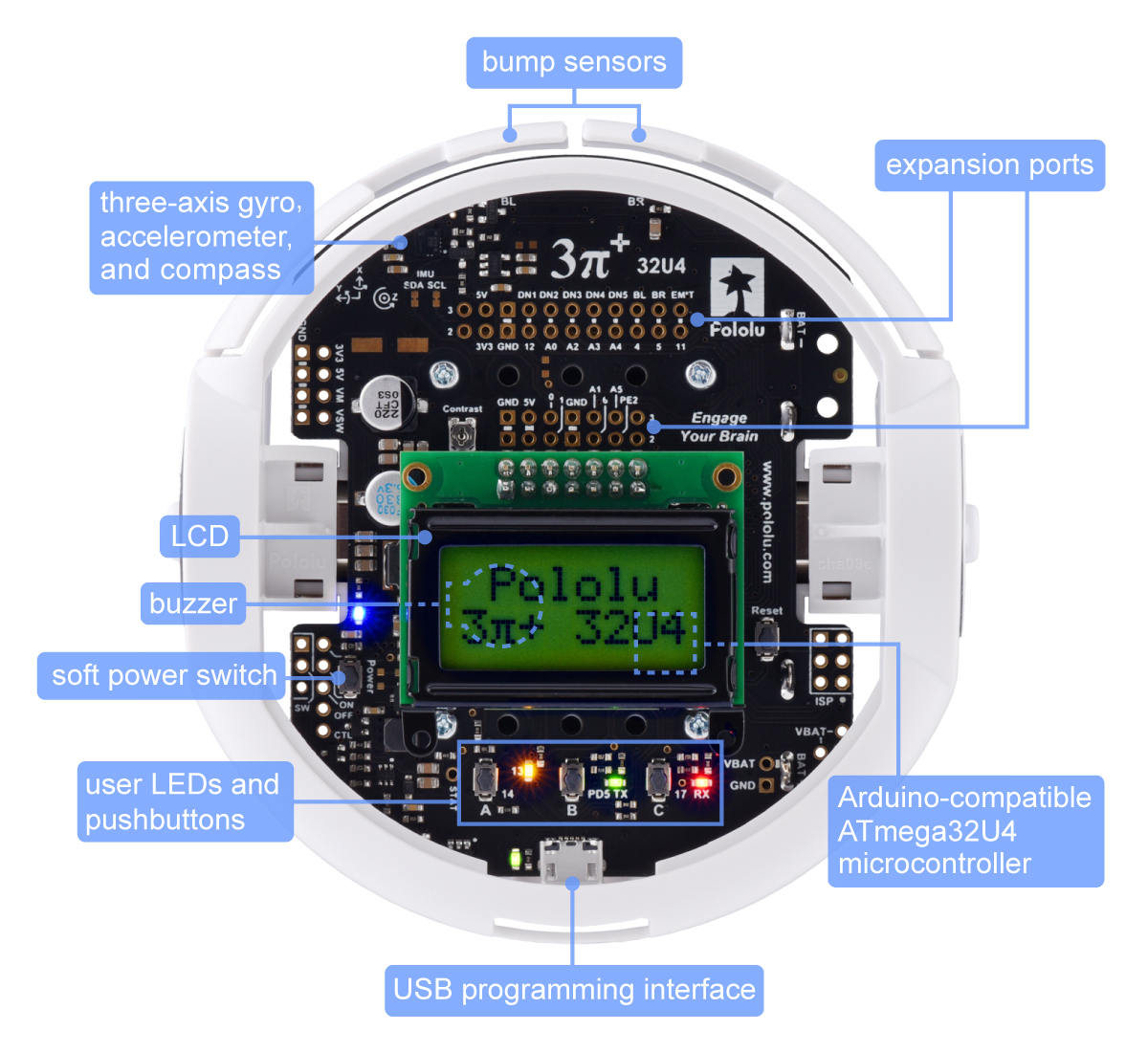 |
3pi+ 32U4 Robot features, top view. |
|---|
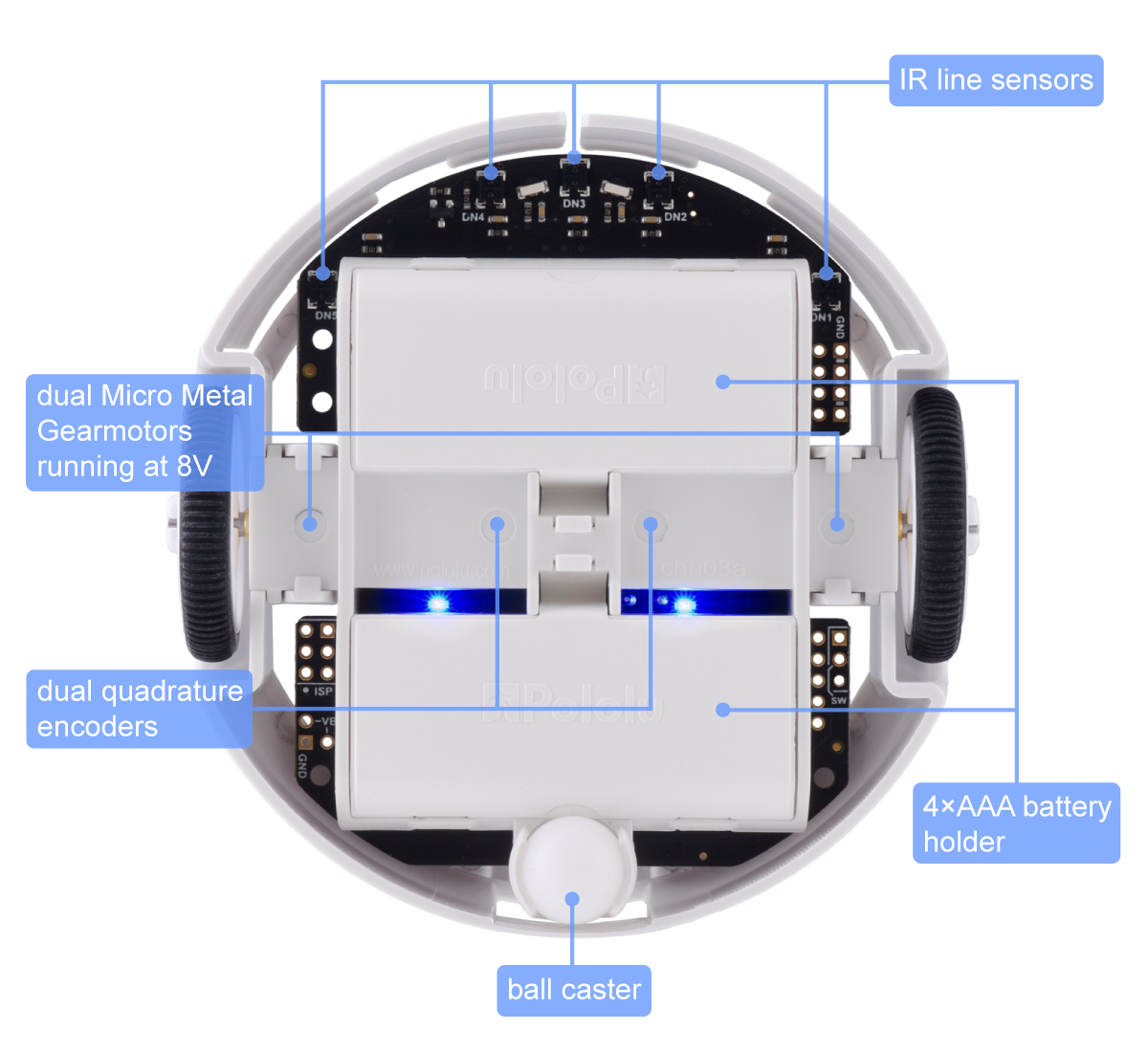 |
3pi+ 32U4 Robot features, bottom view. |
|---|
The 3pi+ 32U4 is also available with three motor options for different usage scenarios:
| 3pi+ 32U4 Version | Products | Micro Metal Gearmotor | Top Speed | Comments |
|---|---|---|---|---|
| Standard Edition | assembled or kit | 30:1 MP 6V | 1.5 m/s | great all-around balance between controllability and speed, with top theoretical speed above that of the original 3pi |
| Turtle Edition | assembled or kit | 75:1 LP 6V | 0.4 m/s | longest battery life, easiest to control, appropriate for swarm robot projects or classrooms where you might not want robots flying around the floor (or desktop) too quickly |
| Hyper Edition | assembled or kit | 15:1 HPCB 6V | ~4 m/s | ridiculous speed, which can definitely be fun. But, controlling that speed can be difficult, which can make the robot more prone to self-destruction (or at least self-inflicted damage), so we recommend this only for advanced users |
These three 3pi+ 32U4 motor options are available in assembled or kit form, and for those who want to do your own thing, the parts are available separately so that you can pick some other motor or gear ratio.
Normally we would have an introductory special for this big of a new product release, but since we are about to launch our annual Black Friday and Cyber Monday sale, you can get a great discount on the new 3pi+ there!

Related products





November 2020 update after 8 months of operations under coronavirus
This week marks eight months since business shutdowns began in Nevada in response to the coronavirus pandemic. Here is an update about how we have been surviving at Pololu since my last detailed post in April, when we got our PPP loan.
 |
We managed to reach a record sales quarter for Q1 despite the last few weeks being under the Nevada emergency measures and February onward being disrupted by the shutdowns affecting our China operations. Sales really dropped in April and even more in May, leading to Q2 sales ending up the worst since 2013. The money we received in April from the PPP loan allowed us to keep paying those employees who were still working and to cover health insurance and other benefits for the rest. We submitted our PPP loan forgiveness application in early July on the day our bank released their application and kept in constant contact with our bank rep while we maintained core operations with a minimal staff.
 |
The initial loan application had been approved very quickly, so we were hoping to get a resolution on the forgiveness similarly quickly to let us know where we stood regarding how much we would be in debt. We made some tough staffing decisions in July and August, and that turned out to be a very good move because the loan forgiveness process ended up taking a lot longer. We started the year with around 80 employees, and by the end of August, we had reduced that to around 55, of which about ten work only remotely. Everyone else has now formally quit or been laid off, with some hope that most of them could eventually return once the pandemic is under control.
Q3 brought several special high-volume sales, including components going into coronavirus testing equipment around the world, which helped Q3 sales inch past our Q1 sales for a new all-time record sales quarter. Perhaps some of that was also impacted by orders delayed from Q2 and from schools buying more kits for the resumption of classes in the fall. It sure felt like things were going in a good direction, which I guess is how a lot of the world felt.
 |
The news did not stay good for long as sales dropped a lot again in October, falling below our April low (but not getting as bad as May) as the new wave of COVID cases swept Europe and brought in renewed shutdowns in many countries there. November has so far also been weak as the coronavirus continues to surge across the globe.
We got one bit of good news for Pololu last week when our PPP loan forgiveness went through! We did not get our whole loan forgiven, but it was over 90% of the loan amount, which is a substantial amount of money that covers a lot of our losses from Q2 and lets us approach the end of the year with a bit of cash reserves instead of being in a hole. It’s a huge relief knowing we should be able to ride out the holiday season without having to do further layoffs.
 |
We are of course working hard to do more than just to get by for another few months. Some of the staff we brought back in the summer are working on new and exciting products, including resumption of projects we had been working on long before the coronavirus hit. We have not even done proper announcements of some of the items that are already released, including our 3-channel wide field of view (FOV) distance sensor module.
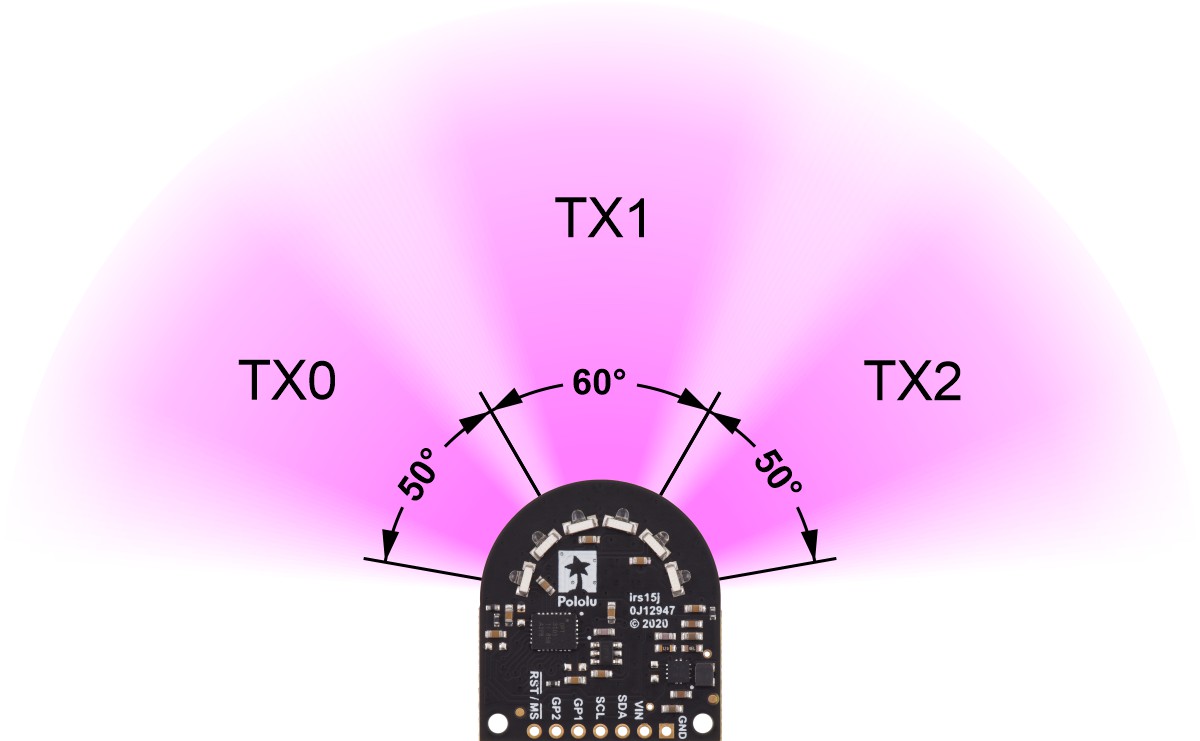 |
That was a very challenging project that I still intend to write about in a separate blog post. Right now, I have one more product to tease that we are pushing to release in time for the holidays!
|
|


Speaking of the holidays, normally we would be gearing up for our biggest sale of the year, our Black Friday/Cyber Monday sale that has run from the Wednesday before Thanksgiving through the following Monday. This also made that period very busy for our shipping and manufacturing departments. Since we are working with a reduced staff this year and many people are already stretched thin covering multiple roles, we will be scaling back the intensity of the sale and running it longer in the hopes of distributing the load on those departments. Last year, we introduced a design-your-own-doorbuster promotion, and that was pretty fun to run, so we’ll try to do that again (though we’ll probably be less open to selling things at a loss just to be in the holiday spirit).
Only six more weeks of this crazy year to go! I am so grateful to everyone who has helped us get this far, from all the customers who kept ordering to the employees who stuck with me through the scariest times to everyone who has made a donation. Thank you very much and stay healthy and safe, everybody!
New product: VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier
 |
December 2020 update: ST originally specified a 3 m (10 ft) maximum range for the VL53L3CX, and we initially released this product with the name “VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier with Voltage Regulator, 300cm Max”. However, they have since released an updated API with software improvements that increase the maximum range to 5 m (16 ft), so we have updated the name of this product accordingly. The latest version of the API should enable this increased range on existing boards as well as new ones; the hardware has not changed.
Please note that the rest of this post has not been updated to reflect the increased 5 m range (which now exceeds the VL53L1X’s 4 m range).
We are now offering a VL53L3CX Time-of-Flight Multi-Target Distance Sensor Carrier. The VL53L3CX is one of ST’s latest ranging sensors featuring their FlightSense technology, which determines distance by measuring how long it takes for emitted light to be reflected from a target and arrive back at the sensor. It can work at distances of up to 3 m, putting the VL53L3CX’s effective range in between those of ST’s older VL53L1X and VL53L0X integrated lidar modules.
Beyond just being an intermediate option, the VL53L3CX is interesting because it has the ability to detect multiple targets within its field of view. This is possible because instead of picking out a single distance based on the reflections received by the sensor, the VL53L3CX outputs histogram data representing how much reflected light it is receiving within different time intervals. The host processor can then read this data through a digital I²C interface and analyze it using special algorithms that ST provides as part of their VL53L3CX API.
This enhanced capability does come at a cost: the added complexity of the histogram processing means that the host requires much more RAM and program memory, making the VL53L3CX difficult to use with small microcontrollers. In our testing, we were unable to fit the VL53L3CX API on a typical 8-bit Arduino, and we are not providing an Arduino library to support the VL53L3CX; therefore, we recommend sticking with the VL53L1X or VL53L0X for applications with similar constraints. However, if you have more resources available on something like a 32-bit processor, the VL53L3CX’s multi-target detection might give you valuable information beyond what you could determine from a distance reading alone.
For more information about the VL53L3CX carrier, see its product page. The first 100 customers can use VL53L3CXINTRO to get up to 7 units for just $7.77 each!

Related products



Starlite by Grant Grummer
Grant Grummer used our laser cutting service to create 6- and 8-point acrylic stars for his project, Starlite: A programmable star-shaped canvas for displaying light patterns.
Starlite uses a 3mm thick laser-cut piece of translucent white acrylic (#7328 white, also called “sign white”) for the front face. The LEDs mount onto a thinner (1.5mm thick) piece that has rectangular cutouts that allow the LEDs to connect to the controls, the main control board, and an UPduino daughter board.
You can read more about Starlite on Grant’s Make: Projects and GitHub pages.
If you are interested in making a similar light display, be sure to check out our selection of LED strips!
Related products







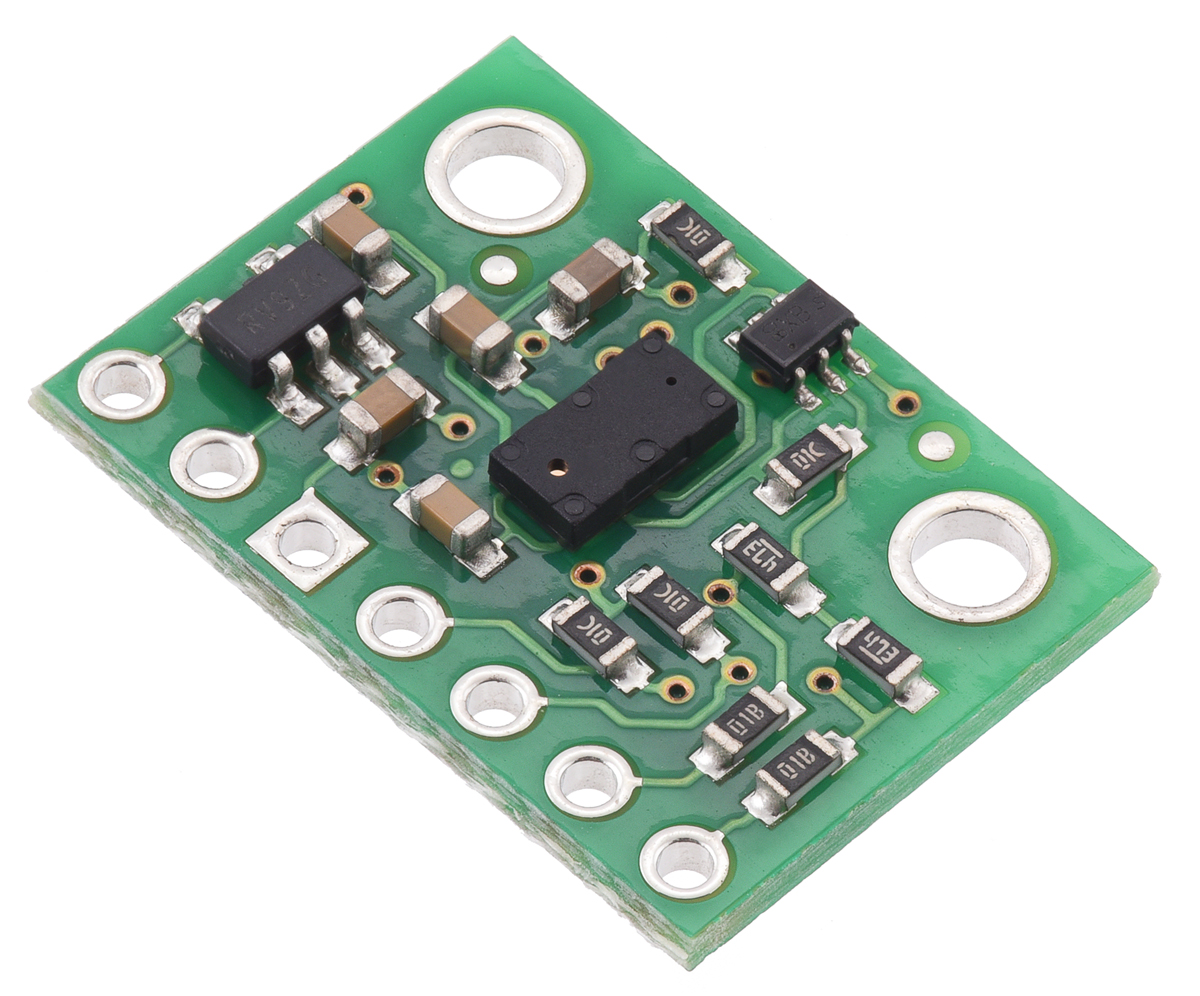
PULSE: A pendant to warn you when you touch your face
 |
PULSE pendant by JPL. |
|---|
PULSE is a 3D-printed wearable device designed by JPL that vibrates when a person’s hand is nearing their face. It’s based around our 38 kHz IR Proximity Sensor, and was designed to be relatively easy to reproduce (it doesn’t require a microcontroller or programming, but you do need access to a 3D printer to make the case). The project is open-source hardware, with complete instructions, design files, and a full parts list available on GitHub.
These are the parts that can be purchased from Pololu:
- Pololu 38 kHz IR Proximity Sensor, Fixed Gain, High Brightness
- 10×2.0mm or 10×3.4mm shaftless vibration motor
- Mini Slide Switch: 3-Pin, SPDT, 0.3A
- Wire
Here’s a short demo of our intern Curtis using a PULSE pendant he made himself:
You can find more information about the PULSE pendant on the PULSE website.
Related products




First new products under emergency operations - new servo wheels!
We are into May, and after almost 8 weeks of shutdowns and emergency operations, most of the world’s attention seems to be moving toward reopening and how to return to some semblance of normal, or at least longer-term sustainable operations. With no particular medical solution even on the horizon, it’s clear that we have a long way to go, and a city like Las Vegas is going to be hurt especially hard and for a long time by changes people will adopt until they are comfortable flying for fun again. Pololu has managed to hold up much better than I initially feared during the first week of mandated shutdowns, and I am especially grateful to all of our customers and staff members who have worked hard to get us this far.
It is with this backdrop of gratitude for making it this far while realizing we still have a long way to go that I am especially excited to announce our first new products released since the pandemic hit!
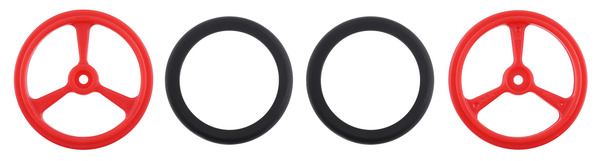 |
 |
 |
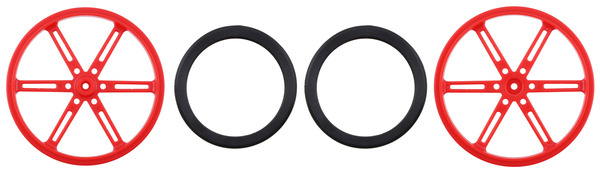 |
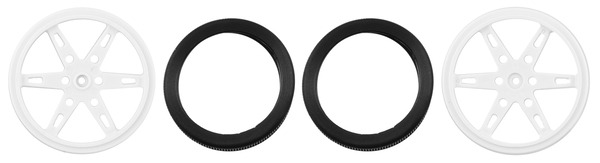
In all, we have eight new wheels for micro and standard sized servos. These are red and white versions of the four sizes we released in black back in January. Since we are operating with a minimum staff on site, we don’t have many actual pictures of the new wheels in action, so I will use the pictures with older black wheels for the rest of the post.
 |
Black Pololu Wheels for Standard and Micro Servos – 90, 70, 60, and 40 mm diameters. |
|---|
 |
We have small, 40 mm and 60 mm sizes that are compatible with micro servo splines with 20 teeth and a 4.8 mm diameter and can be used with the following continuous rotation servos that we carry:
- FEETECH FS90R Micro Continuous Rotation Servo
- FEETECH FT90R Digital Micro Continuous Rotation Servo.
 |
We have larger 70 mm and 90 mm sizes that are compatible with standard servo splines with 25 teeth and a 5.8 mm diameter and can be used with the following continuous rotation servos we carry:
- FEETECH Continuous Rotation Servo FS5106R
- Power HD Continuous Rotation Servo AR-3606HB
- SpringRC SM-S4303R Continuous Rotation Servo
- Parallax Feedback 360° High-Speed Servo
If you plan on using the wheels with a servo not listed above, be sure to check your servo’s specifications for compatibility as servo splines are not standardized.
I was never especially fond of continuous-rotation servos, but there’s no denying that they’re often a quick and relatively simple way to get something moving, both from the electronics side (since the motor controller is built into the servo) and the software side. I am a fan of building your own unique robots, so I am happy we now have a range of size and color choices to give you more problem-solving options and variety in your robots.
Like many of our plastic products, these wheels were designed by us in Las Vegas and then injection molded in China. Since we already had the design and molds finished before we released the black versions, these new products are not the most new from a design perspective. We made the black ones first, and red and white were supposed to follow shortly after the Chinese New Year holiday. As we all got reminded, things don’t always go according to plan. And now, what should have been a minor new product has additional sentimental meaning as our first new product since the coronavirus upended our lives and a symbol of our determination to carry on.
We had been announcing new products along with introductory discounts for the last few years, and I wavered for a bit about doing extra discounts for these wheels. Shipping costs have gone up dramatically, and we’re trying to raise whatever money we can, so extra discounts are not the first thing I felt like doing. But the whole point is that we do want to celebrate at least a little! So, hooray for the continuation of the new product discount tradition:

The first hundred customers to use coupon code SERVOWHEELS can get 22% off up to 3 pairs of each size! And, if you are one of the lucky ones not especially financially hurt by the pandemic and are interested in these wheels, please consider getting them without the coupon or even donating to help Pololu keep operating. We have set up item 2400 for donating in $1 increments.
Thank you to all of you who have donated to us or otherwise supported us over the past two months. Stay safe and healthy, everybody!
Related products









Rethinking open source in the context of the coronavirus pandemic
We are into week 6 of emergency operations. Our day-to-day routines are largely unchanged from what they were last week (we continue to ship all orders on time with a reduced on-site staff), so please see my earlier posts for more details about that. After more than a month of a new normal setting in, we are striving for a balance of avoiding complacency in daily operations while planning for a future that will likely never be back to how things were a few months ago.
One of our team members passed away (probably not directly related to the coronavirus)
On the complacency front, we were reminded of the stakes when one of our employees unexpectedly passed away at the end of last week from a sudden illness that, from the limited information we have available, was not related to the coronavirus. She was not part of our reduced, on-site staff, so I last saw her in person six weeks ago, and she was in contact a few weeks ago. As the toll of the pandemic mounts, more and more of us are going to be hit increasingly personally, from losing jobs and businesses to missing out on pivotal moments like being present at a child’s birth, to literally life and death experiences made even more painful by new restrictions on being with loved ones and being able to mourn.
However things play out and however bad they get, let’s try to be part of making things better. We can be responsible, supportive, useful, thoughtful, helpful. Many of us are suffering, and probably the only ones not afraid are the ones too unaware to know they should feel some fear. But we can acknowledge the fear without letting it completely overpower us, and we can still look for places in our lives where we can make a difference and decide to make things better.
Rethinking open source in the context of the coronavirus pandemic
 |
The rest of this post is about a longer-term strategy I am thinking about in response to the pandemic: moving toward more open-source projects (both for software and hardware). I would very much appreciate any thoughts and advice people have on the subject.
I wrote about open-source hardware exactly eight years ago this week. I just read it for the first time in maybe five years, and although I feel like I could have written the same thing recently, in many ways I’m a different person than I was then, with the usual progress one would hope for from living another 25% longer, supplemented with extra jolts to my system from things like my baby dying the day before he was born over five years ago and the coronavirus pandemic we have all been shocked by this year. It took me most of those five years to really be able to move on from Dez dying, and when I was locking up Pololu on the Friday a month ago after the first week of escalating government-mandated shutdowns, I really thought I might not be reopening it for weeks and that there would be little chance of Pololu surviving.
Having weathered the past five weeks of emergency operations and being one of the lucky businesses to get temporary funding via the Paycheck Protection Program (PPP loan), my outlook about Pololu making it has substantially improved, and with solvency likely assured for at least a few months, I am thinking about strategic changes for medium and long-term survival in a very different world where the future looks especially uncertain. Here are some of the changes to the world and to Pololu that make open-source projects much more compelling than eight years ago:
Longer-term changes preceding the coronavirus pandemic:
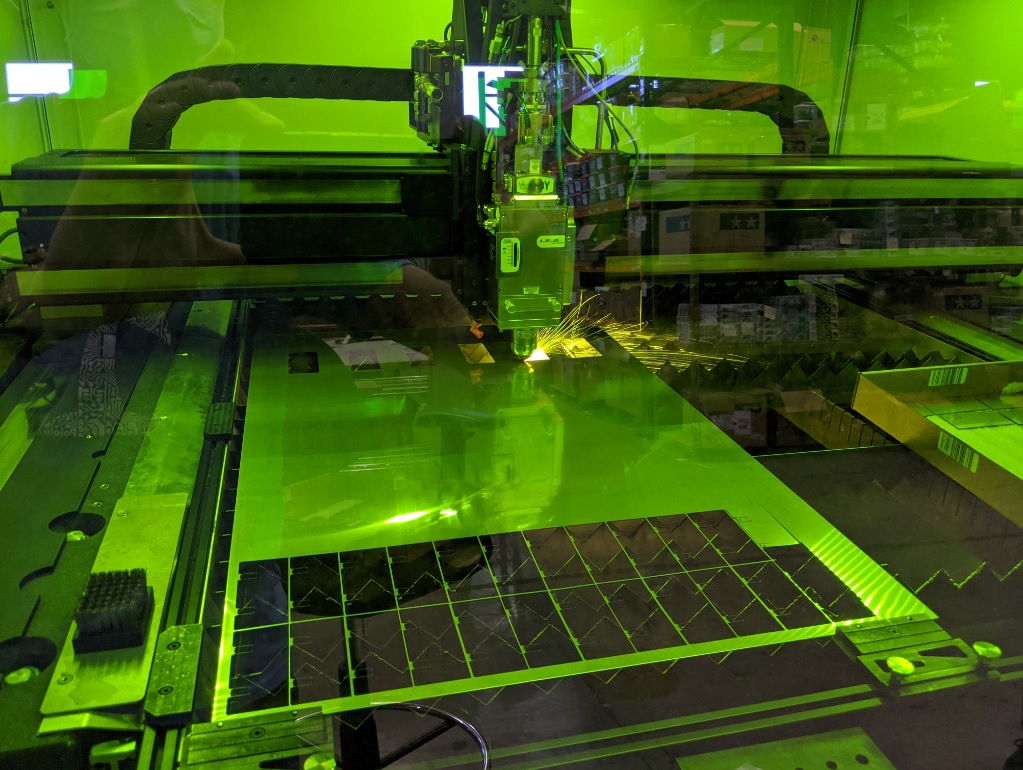 |
Laser cutting Zumo blades at Pololu on 22 April 2020. |
|---|
- Pololu’s manufacturing capabilities and sophistication have improved substantially over the past 8 years. (I still believe that open-source hardware makes more business sense for those with manufacturing capability since competitive advantages would move from product design to production capability, which is more difficult to copy.)
- Copies of our products and documentation and other IP have become a big problem. Even in cases where there might not have been outright fraud intended (e.g. counterfeits being falsely sold as products made by Pololu), consumers of knock-offs take up our support staff time, introduce confusion and uncertainty among customers who have genuine versions of our products, and generally dilute the value of our brand. At least for some products, it might be more pragmatic to officially open up the designs than to fight the copies.
- Our brand and processes and relationships (e.g. with our distributors) and other aspects of being a successful business have grown. This gives us value and competence beyond our designs, so opening them up would be less of giving everything away and undermining our ability to remain in business.
Previously-known arguments for open source that have new weight because of the pandemic:
- Given the increased likelihood that many companies will go out of business, having open-source products can give potential customers more confidence in designing our products into their own products or curriculums. Even if Pololu were to go out of business, at least our designs could get produced somewhere else with less effort than having to design in a new product.
- Employees working on the products might be more motivated to work on them since continued existence of their creations would be less dependent on Pololu continuing to make them.
New arguments for open source specifically because of the coronavirus pandemic.
- Pololu was not particularly well set up for remote workers. While we are working on improving the situation, security and similar concerns might add more friction that would continue to make some kinds of remote work/projects impractical. If they were instead completely open-source projects independent of Pololu, security (as far as keeping designs secret) and supporting external connections to Pololu internal systems would be less of an obstacle.
- We have been soliciting donations to help Pololu survive this crisis. Potential donors might be more encouraged to donate if they had some confidence that they are supporting existence of products and designs that will continue being available even if Pololu were to stop manufacturing them.
- There are now many more people out of work (whether paid or not) around the world who might be open to donating their time and expertise to help on Pololu projects.
- There are now many more students at home or recent graduates without jobs or internships that could especially benefit from looking at or contributing to our designs.
- The pandemic has increased awareness about potential benefits of manufacturing locally, or at least being less dependent on one region or country. Perhaps that will alleviate some of the price pressure that makes it more difficult to open up designs (if you have to compete with the cheapest place in the world to make something, it’s harder to just give them your design).
In short, the heightened uncertainty about business collapses, shortage of money, and physical separation/decentralization that the coronavirus crisis is forcing on us all substantially tip the balance in favor of moving toward more open source projects in organizations like Pololu.
I would appreciate any advice or thoughts any of you have on the topic. Here a few areas you might be able to comment on:
- What do you think in general?
- I am considering specific product-based fundraising campaigns in which we could open up some existing products after exceeding some donation threshold; how does that sound?
- Are there some existing open-source projects that you would like Pololu to start contributing to or manufacturing?
- What’s the latest on open source hardware, in terms of standard licenses, business models, examples, etc? (I generally feel like I hear about open source hardware less than I did 8 years ago, and that there have been some notable disappointments/sell-outs that have dampened the movement, but perhaps I just have not been paying as much attention.)
- What are the best open-source software tools for electronic CAD and mechanical CAD?
- Are there notable recent success stories in terms of open-source physical products?
- Are there any notable examples of companies or organizations attempting to produce open-source physical products?
Thank you for your continued support, everybody! We are working hard to be worthy of it and to do our part to make things better.
Related products
Coronavirus impact update: we got our PPP loan!
 |
We are still shipping all orders
After almost a month of emergency operations, during which we have continued to ship all orders, our Paycheck Protection Program (PPP) loan came through, which should buy us at least another several months of continued operation! I will get to more about that later in this post, but first, here is a summary of how we have gotten this far:
- 22 March 2020 – initial COVID-19 impact update and appeal for donations after the first week of emergency operations, when I thought complete shutdown of Pololu operations was imminent.
- 29 March 2020 – update after two weeks:
- We are still operating, with every order shipped! – with tips on how to check stock and look for similar products on our site
- Thank you to everyone who has donated – with extra details about how donations help beyond immediate dollar value
- Landlord/building situation – detailed explanation about how we ended up in the building we are in and why we cannot expect any immediate help from the landlord
- SBA loans/stimulus package – some thoughts on emergency loans we are applying for
- Outlook and plan for now – generally still applicable now (13 April)
- How you can help
- 6 April 2020 – update after three weeks:
- Thank you for your continued donations
- Employee update – with details about how we are supporting our employees
- Pictures of life at Pololu
PPP loan extends our ability to keep operating at least a few months!
The main big news for us is that our Paycheck Protection Program (PPP) loan went through, which should guarantee that we can meet our minimal expenses for at least a few months even if we had to completely stop operations in Las Vegas. This also gives us some breathing room to plan a month or two down the road instead of just day to day or week to week. One of the main questions facing us regarding the loan is how much of it will remain a loan and how much might be forgiven. It looks like our options range somewhere between these two extremes:
- Continue keeping expenses to a minimum. This might reduce how much of the debt is forgiven, so we’d get hit by big loan repayments starting in about six months. On the plus side, we’d at least have the money to work with. And if some longer-term disaster recovery loan comes through and could absorb this loan, that would at least stretch out how quickly we have to repay the money. As it stands, everything would have to get repaid within about two years.
- Spend as much of the money as possible (on qualifying expenses, mostly payroll). This might get more of the debt forgiven, which is obviously a plus. On the other hand, we’d be out of money sooner, with no guarantee of when we might be able to get more. And it would be especially bad to end up with the money spent but still be on the hook for repaying it.
The exact rules for what will be forgiven are still getting clarified, so this is adding yet another level of uncertainty that makes any decision making difficult. Still, after four weeks of scrambling to have a plan for the next day and then the next week, it feels like a luxury to be able to even be talking about next month, even if we do not know when more people will be able to start going back to work again.
What’s clear is that while a loan might buy us some short-term time, we still need to figure out a way to operate profitably with the various restrictions that are likely to stay with us even as states and countries begin reopening their economies.
 |
Pick and place machine maintenance, 9 April 2020. |
|---|
Thank you for your continued donations 🙏
I am very grateful for the donations that continue to come in. There are too many for me to respond to individually, even for those of you I know! So, sorry I am not able to say so individually, and please know that I do see them coming in and that it means a lot. They have helped us get through the first rough month, where there were days (especially early on) where I really thought Pololu would not be able to make it through. I know it cannot be part of the long-term plan, but given the extraordinary time we are going through, every bit helps to give us a bit more time and a bit more encouragement.
If you can, please consider donating to help Pololu make it through this challenging time and to emerge stronger than ever. We have set up item 2400 for donating in $1 increments.
Other ways you can help (mostly copied from last post):
Pay now, ship later
We have added a feature to our online checkout system to allow for orders to be placed with a “pay now, ship later” option that lets you authorize us to charge the payment for an order as soon as it comes in, possibly well ahead of when the order would actually ship. We started working on this feature at a time when we thought complete shutdown of our operations was imminent, when it might have been weeks or even months before we could reopen. As I wrote at the top of this update, we have been able to ship all orders, and I expect to continue shipping, but this option still allows us to prioritize shipments and reduce stress with orders that come in later in the day and can get shipped the next day. We have already received dozens of orders with this option selected, and it is also encouraging just to see that our customers are trying to help us out. Thank you to all of you who have selected that option!
Order non-soldered versions of products, or the higher-stock versions
We offer a few of our products with some of the optional (but usually used) through-hole connectors soldered in. If you are able to solder, please consider ordering the non-soldered versions if there is plentiful stock of them. We do all of the through-hole soldering by hand, and most of our manual assemblers were older or otherwise in the higher-risk population for COVID-19, so they are not currently working here. And if you’re at home doing a non-critical project, now is a good time to do a little extra soldering, right?
On a related note, it’s a little bit easier for us if you order the item that has more stock. Each product page has links to relevant parametric comparison tables that can help you identify similar products that might have more available stock:
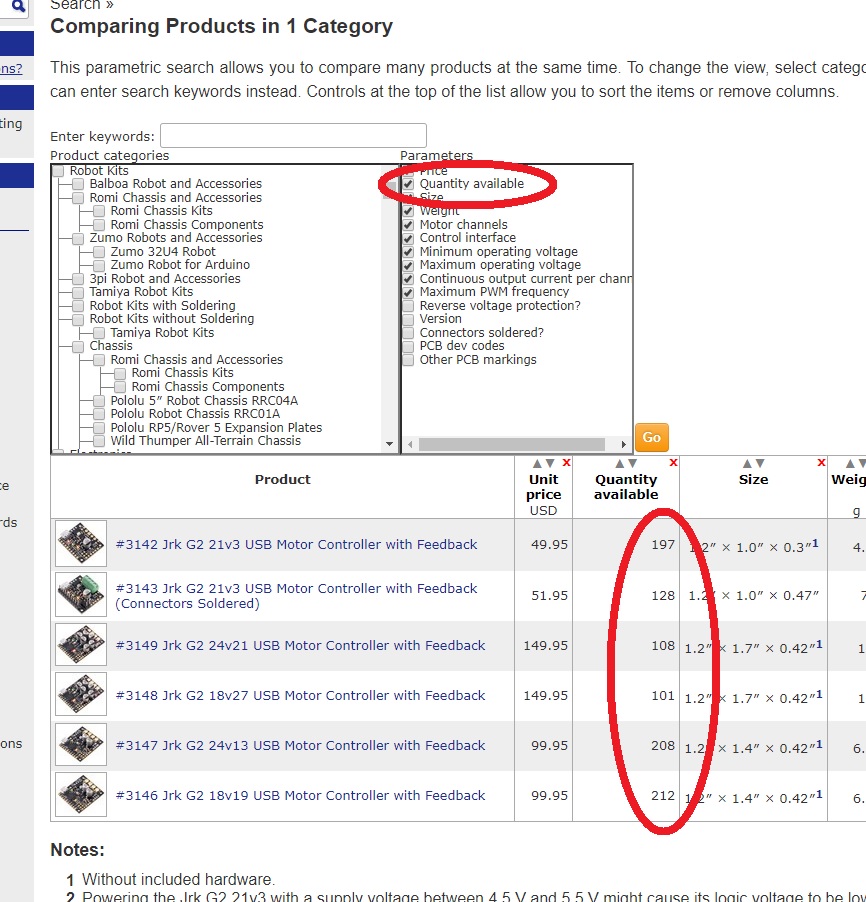 |
You can check available quantity of similar products on the parametric comparison table. |
|---|
If your application could get by with either an item of which we have 300 in stock or one of which we have 12 units, please get the product that we have much more of. It’s probably a more popular version that we make more often, and it keeps the less popular version available for those who might really need it.
Help each other on our forum
We have had to severely cut back on our technical support. If you are one those people with extra time on your hands now and are familiar with any of our products, please consider helping out our other customers on our forum.
Ask others to help us out
If you know anybody that could afford to help us out, please let them know and ask them to contribute.
Other suggestions and ideas
Part of the reason I have been going into more details in some areas of these updates is so you might be able to better give us advice about how we could make things better. Maybe you’re also working at a small business facing similar challenges, and you have some good suggestions. Maybe your uncle has a vacant building nearby. One suggestion I’ve heard repeatedly is about gift certificates, which we are looking into; if you know of particularly good ways of implementing that or things to be careful about, please let us know.
Thank you all for your support. Stay safe and healthy, everybody!
Related products


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










