Pololu Blog »
Pololu Blog (Page 3)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New product: High-Power Stepper Motor Driver 36v8
 |
 |
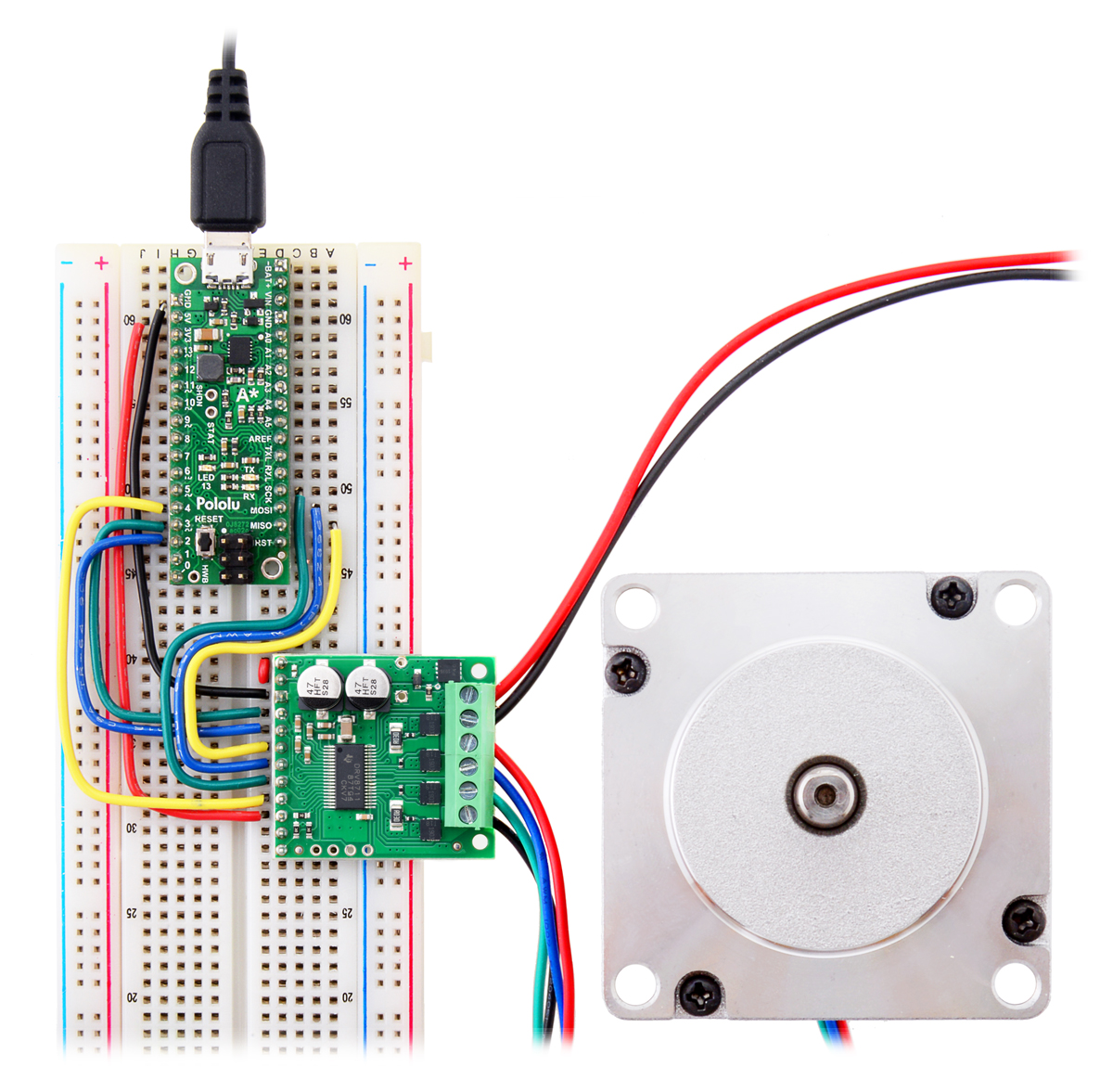 |
We’re excited to announce the release of our new High-Power Stepper Motor Driver 36v8 for controlling large bipolar stepper motors. It operates over a wide 8 V to 50 V range and can deliver up to 8 A continuous per phase (11 A peak with sufficient additional cooling), making it our most powerful stepper motor driver by far. Here are some of its key features:
- Highly configurable through SPI interface
- Optional STEP/DIR control pins (stepping can also be controlled through SPI interface alone)
- Nine different step resolutions down to 256 microsteps: full-step, half-step, 1/4-step, 1/8-step, 1/16-step, 1/32-step, 1/64-step, 1/128-step, and 1/256-step
- Adjustable current control lets you set the maximum current output, enabling the use of voltages above your stepper motor’s rated voltage to achieve higher step rates
- Adaptive blanking time, adjustable decay times, and various current decay modes enable the creation of ultra-smooth motion profiles through the SPI interface
- Optional STALL output enables stall detection when microstepping
- Optional BEMF output enables more advanced control and stall detection algorithms based on the back EMF of the stepper motor
- Driver supports alternate operating mode for controlling two brushed DC motors with PWM inputs instead of one bipolar stepper motor with STEP/DIR inputs
- Inputs compatible with 1.8 V, 3.3 V, and 5 V logic
- Digital outputs are all open drain with pull-ups to externally supplied IOREF voltage for use with non-5V systems (IOREF can be connected to neighboring 5V OUT pin for use with 5V systems)
- Under-voltage lockout, over-current protection, short circuit protection, and reverse-voltage protection
- Arduino library and example sketches are available that provide basic functions for configuring and operating the driver
The 36v8 board has the same dimensions and pinout as the our older 36v4 version, so you can easily swap in this newer version to double the power to existing projects (or get the same power at lower temperatures).
Introductory special discount! Be one of the first to try out these new drivers and save $5 with coupon code HPSMD36V8INTRO!
Related products


Our Black Friday sale has started!

Our Black Friday sale is back with huge discounts on 1,402 of our top products! With the pandemic and resulting parts shortages over, we are able to offer our best deals in five years, and for some products, our best prices ever. Visit the sale page to see all the available deals and add the necessary coupons to your cart. The sale runs through Monday, December 2, and the discounts can be used on backorders if we happen to run out of stock, but we encourage you to place your orders early since backorder fulfillment might take longer than usual due to the increased order volume.
Please note that during the sale, our order fulfillment times might be longer than usual, but we will do our best to get your order shipped as fast as we can. Additionally, we are closed Thursday, November 28 for Thanksgiving. Happy Thanksgiving!
How much did our 305 kW solar plant cost, and was it worth it?

This is the fifth post in a series documenting the installation and first year of operation of Pololu’s 305 kW solar array. Here are the previous posts:
- Part 1: Background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: Installation from January 2023 through first day of operation on October 5, 2023.
- Part 3: System failures and production results during the first year of operation.
- Part 4: Analysis of electrical costs before and after our system was installed.
In this final post in the series, I will go over the costs and benefits of our solar system, some lessons learned, and my thoughts on whether this has all been worth it. Continued…
Energy costs after a year of operating Pololu's 305 kW solar project

This is the fourth post in a series documenting the installation and first year of operation of Pololu’s 305 kW solar array. Here are the previous posts:
- Part 1: background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: installation from January 2023 through first day of operation on October 5, 2023.
- Part 3: System failures and production results during the first year of operation.
In this post, we will look at how our solar installation affected our electricity bills. Because operations were so dramatically altered by the pandemic starting in 2020, we have to go back to 2019 for the best baseline for electricity consumption and cost. To maximize the scientific rigor of our observations, we changed as many variables as possible since then, including: Continued…
New products: compact reverse voltage protection and ideal diodes
 |
We just released several small reverse voltage protection and ideal diode boards that can protect your projects from reverse voltage application. We have reverse-voltage protection built into many of our products, and we usually implement it using a P-channel MOSFET, like this:
 |
Reverse-voltage protection using a P-channel MOSFET. |
|---|
This approach is usually more efficient than just using a diode since the MOSFET has a lower voltage drop across it. However, P-channel MOSFETs have worse on-resistances than N-channel MOSFETs of similar prices and sizes. This has not mattered much for our lower-powered products, but that limitation is becoming more apparent as we are developing more products with maximum operating voltages over 40 V. The next common MOSFET voltage above 40 V is 60 V, and at that voltage and with currents above around 10 A, it starts becoming more size-efficient to use an N-channel MOSFET plus an extra chip to manage the additional complexities of controlling the N-channel MOSFET in this kind of application. This is how that circuit looks:
 |
Schematic diagram of the 60V Pololu Reverse Voltage Protectors (green PCBs). |
|---|
Since we are planning on using this approach on several new products, we decided to make standalone product versions as well. Here are how the first products look, using 3×3 mm MOSFETs:
 |
This lets us get up to about 10-12 amps continuous current and an operating range of 4-60 V, which is perfect for most of our products. We tried to make the board as small as possible, and for the input and output connections we are using a new slot approach that lets the boards work with standard 0.1" headers or connectors, 3.5 mm connectors, and 5 mm connectors.
 |
Examples of various connectors that can be used with the Pololu 10A/12A Reverse Voltage Protectors (from left to right: 5mm terminal blocks, 3.5mm terminal blocks, 0.1″ headers). |
|---|
Texas Instruments offers two similar parts for the MOSFET controller. The LM74500 offers the same functionality as the simple P-channel MOSFET, allowing current to flow in both directions as long as the polarity is correct. This is useful for applications such as motor drivers where we want power to be able to flow back from the motor into the battery. There is also the LM74700 version, which makes the circuit function as an ideal diode, allowing current to flow in only one direction. We are offering our boards with both controller options and with two MOSFET options, for a total of four product versions:
| Pololu Item # |
Max current |
On resistance | Reverse current blocking |
Price |
|---|---|---|---|---|
| #5380 | 10 A | < 10 mΩ | no | $1.49 |
| #5381 | 12 A | < 5 mΩ | $1.95 | |
| #5382 | 10 A | < 10 mΩ | yes (ideal diode) | $1.75 |
| #5383 | 12 A | < 5 mΩ | $2.25 |
The datasheets for the LM74500-Q1 reverse voltage protection controller and LM74700-Q1 reverse voltage protection ideal diode controller provide additional information about adding a transient voltage suppressor (TVS) diode across the input as part of a more general input protection circuit. We have pads for an SMB-size TVS on the back side of the board for those interested in adding this kind of protection:
 |
As with our other electronics products, we make these at our Las Vegas, Nevada headquarters, so we can build custom versions with that TVS populated with a part of your choice (typical minimum quantities to make that worthwhile are around 200 pieces).
Are these interesting products? Would you want to see higher-current versions with bigger MOSFETs? Let us know in the comments or on our X and Facebook posts.
Introductory special discount! Try some out for as low as $1.16 each using our introductory special coupon, RVPINTRO (limit 5 per version)!
Related products




Notes and pictures from the 2024 ECEDHA Western Regional Meeting at UNLV

Over the last two days, I attended the 2024 Western Regional Meeting of ECEDHA, the Electrical and Computer Engineering Department Heads Association. It was held this year at UNLV, which is only 3 miles (5 km) away from Pololu, in the engineering department’s new Advanced Engineering Building that was just opened earlier this year.
 |
UNLV’s new Advanced Engineering Building, November 2024. |
|---|
I was there representing Pololu as one of five local industry sponsors. The larger companies there were treating it more like a recruiting event, and while we have several UNLV alums working at Pololu along with half a dozen student interns from UNLV, I looked at the event more as an opportunity to meet some of our customers. I also got to see some of UNLV’s new facilities for engineering students and researchers. Continued…
First year production results of Pololu's 305 kW solar panel array

This is the third post in a series detailing our experience over the past two years installing and operating a 305 kW array of 630 solar panels on our building in Las Vegas, Nevada. Here are the previous posts:
- Part 1: background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023.
- Part 2: installation from January 2023 through first day of operation on October 5, 2023.
I left off with our first look at the SolarEdge monitoring site on October 5, 2023. It’s nice to see nearly real-time generation results and status. The SolarEdge P1101 optimizers connect to pairs of solar panels, so that is the resolution we can see in the array. Here is a close-up as I write this at 10AM on October 31, 2024, with a section affected by the shadow from an air conditioner circled:
 |
SolarEdge monitoring site solar panel array close-up at 10AM on October 31, 2024. |
|---|
The 1.0.72 pair of panels and 1.0.19 pair of panels at around 130 Wh so far today have generated only about half as much as the nearby panels not affected by the shadows. Continued…
Installation of Pololu's 305 kW solar generation system

 |
This is the second post in a series detailing our experience over the past two years installing and operating a 305 kW rooftop solar system on our building in Las Vegas, Nevada. In the first post, I covered some of the background starting in late 2022 and how we committed to the $650,000 project by the beginning of January 2023, with a target completion date of May 31, 2023. This post covers how the actual installation went. Continued…
New products: D45V1ExFx tiny 65V max input step-down voltage regulators
 |
We just released the new D45V1ExFx line of small voltage regulators that can efficiently deliver up to 100 mA from input voltages up to 65 V. The small size, high efficiency, and wide input voltage range make these especially worth considering for low-power projects involving wildly fluctuating sources such as solar panels (you can see from my post yesterday that I have had solar on my mind lately) and other energy harvesting technologies. You might also just want the peace of mind of having the extra input voltage margin on something like a 24 V project that might have occasional spikes from something electrically noisy also being supplied by the same line. Or you might just have a few of these around for their small size and high efficiency at low currents.
 |
Typical efficiency of the Step-Down Voltage Regulator D45V1ExF5. |
|---|
(The 70-90% efficiency by itself is not particularly notable, but that efficiency is maintained to output currents of a few mA, which is kind of special.)
We are offering basically the same regulator circuit in two form factors. The D45V1E1Fx family has components on both sides of the PCB and measures just 0.3″ × 0.5″, making them our smallest step-down regulators.
 |
D45V1E1Fx step-down voltage regulator basic dimensions with US quarter for size reference. |
|---|
The larger D45V1E2Fx versions take up twice the area at 0.5″ × 0.6″, but they are thinner and, more importantly, offer two extra pins, including a precision enable input that can be used to set a cutoff voltage.
 |
D45V1E2Fx step-down voltage regulator pinout. |
|---|
We have a 1 MΩ pull-up resistor on the enable input, which means that if you pull that line low, you will lose about 1 μA per volt on your input. At higher input voltages, this current is higher than the quiescent (no-load) current the regulator consumes, so if you are just powering a microcontroller with a low idle or sleep current, you might be better off just using those low-power states to save energy, but if your load continuously draws more current, the shutdown feature could help prevent over-discharging your battery.
As with our other electronics products, we make these at our Las Vegas, Nevada headquarters, so we can quickly customize them for other output voltages besides our stock versions of 3.3 V, 5 V, and 12 V (depending on the customization, we can usually do custom production runs for setup fees starting around $250).
Introductory special discount! Try some out for only $3.33 each using our introductory special coupon, D45V1EXINTRO (limit 3 per version)!
Related products






Pololu's 305kW solar generation system: Was it worth it?

October 2024 marked one year of operation of our 305 kW rooftop solar power generation system. In this series of posts, I will reflect on our installation and operation experience over the past two years to try to assess whether it was worth it. This first post covers some background leading up to the project and the overall system design. I will detail the installation process, the first full year of operation, and the production and financial results in subsequent posts. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










