Pololu Blog »
Pololu Blog (Page 15)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New 5:1 Glideforce light-duty linear actuators
 |
We have filled out our line of 5:1 Glideforce Light-Duty Linear Actuators to include all of Concentric’s available lengths by adding 2″, 6″, 8″, and 10″ versions, with and without feedback, to our existing 4″ and 12″ options. The low gear ratio makes these our fastest (but weakest) linear actuators, capable of lifting up to a few dozen pounds at speeds up to 1.7″ per second (44 mm/s) at 12 V. For stronger but slower options, we have versions available with a 10:1 gear ratio or 20:1 gear ratio.
This brings our total selection of light-duty actuators to 36 options:
| Actuator Type |
Max Dynamic Load |
No-Load Speed @ 12 V |
Max-Load Speed @ 12 V |
Current Draw @ 12 V |
Nominal Stroke Length |
With Feedback |
Without Feedback |
|---|---|---|---|---|---|---|---|
| Light-Duty (LD) 5:1 |
15 kgf [34 lbs] |
4.4 cm/s [1.7″/s] |
3.6 cm/s [1.4″/s] |
1.2 A – 3.2 A |
2″ | LACT2P-12V-05 | LACT2-12V-05 |
| 4″ | LACT4P-12V-05 | LACT4-12V-05 | |||||
| 6″ | LACT6P-12V-05 | LACT6-12V-05 | |||||
| 8″ | LACT8P-12V-05 | LACT8-12V-05 | |||||
| 10″ | LACT10P-12V-05 | LACT10-12V-05 | |||||
| 12″ | LACT12P-12V-05 | LACT12-12V-05 | |||||
| Light-Duty (LD) 10:1 |
25 kgf [55 lbs] |
2.8 cm/s [1.1″/s] |
2.3 cm/s [0.9″/s] |
1.2 A – 3.2 A |
2″ | LACT2P-12V-10 | LACT2-12V-10 |
| 4″ | LACT4P-12V-10 | LACT4-12V-10 | |||||
| 6″ | LACT6P-12V-10 | LACT6-12V-10 | |||||
| 8″ | LACT8P-12V-10 | LACT8-12V-10 | |||||
| 10″ | LACT10P-12V-10 | LACT10-12V-10 | |||||
| 12″ | LACT12P-12V-10 | LACT12-12V-10 | |||||
| Light-Duty (LD) 20:1 |
50 kgf [110 lbs] |
1.5 cm/s [0.57″/s] |
1.2 cm/s [0.48″/s] |
1.2 A – 3.2 A |
2″ | LACT2P-12V-20 | LACT2-12V-20 |
| 4″ | LACT4P-12V-20 | LACT4-12V-20 | |||||
| 6″ | LACT6P-12V-20 | LACT6-12V-20 | |||||
| 8″ | LACT8P-12V-20 | LACT8-12V-20 | |||||
| 10″ | LACT10P-12V-20 | LACT10-12V-20 | |||||
| 12″ | LACT12P-12V-20 | LACT12-12V-20 | |||||
Related products








New products: ACS724 current sensor carriers
 |
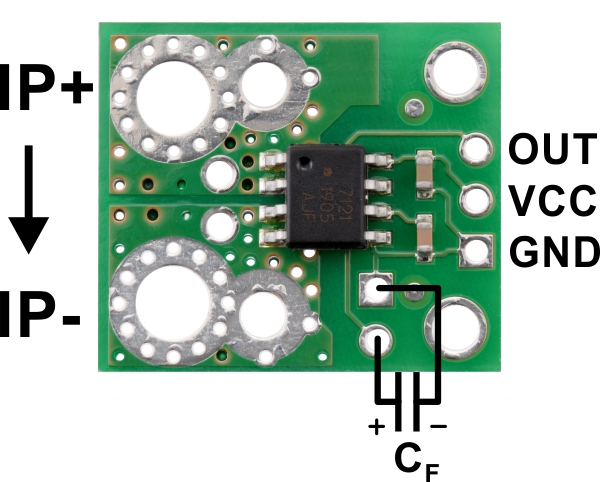
We now have new current sensors based on Allegro’s ACS724, the successor to the ACS714 that we have been using for many years. The ACS724 offers a number of exciting improvements over the ACS714, including more current range options (up to ±50 A!), over twice the sensitivity for the ±5 A version, a higher bandwidth for faster response times, and differential Hall sensing for substantially reduced interference from ambient magnetic fields. In quick tests, we saw a variation of around 1% of the full range just from changing the orientation of the ACS714 in space (because of the Earth’s magnetic field), while the ACS724 output stayed steady regardless of orientation. We also tried bringing a small magnet close to each sensor, and its effect on the output was many times smaller on the ACS724.
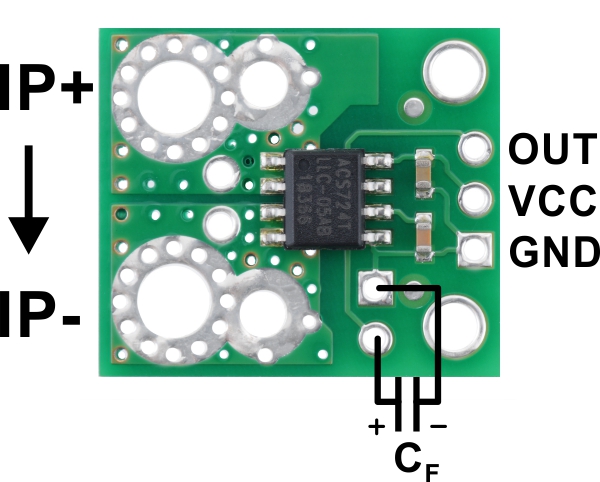
These bidirectional and unidirectional current sensors are a simple way to gain fundamental insight into the performance of your system. You can use them for closed-loop torque control of actuators, tracking power consumption over time, or even as inexpensive current probes for an oscilloscope. They output an analog voltage that varies linearly with the current passing through them, and because they use the Hall effect to measure the current, they offer full electrical isolation of the current path from the sensor’s electronics. This method of sensing means the sensor can be inserted anywhere into the current path, including on the high side, and because their current path resistance is on the order of 1 mΩ or less, they have minimal effect on the rest of the system.
Five different current ranges are available:- ACS724 Current Sensor Carrier -5A to +5A
- ACS724 Current Sensor Carrier -20A to +20A
- ACS724 Current Sensor Carrier -50A to +50A
- ACS724 Current Sensor Carrier 0A to 10A
- ACS724 Current Sensor Carrier 0A to 30A
Together with the Broadcom ACHS-712x current sensors we released last month, this brings our full current sensor lineup to thirteen sensors:
 ACS709 Current Sensor Carrier |
 ACS711EX Current Sensor Carriers |
 ACS714 Current Sensor Carriers |
ACS724 Current Sensor Carriers |
ACHS-712x Current Sensor Carriers |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sensor IC: | ACS709 | ACS711EX | ACS714 | ACS724 | ACHS-712x | ||||||
| Current range / sensitivity(1): | ±75 A / 28 mV/A | ±15.5 A / 136 mV/A ±31 A / 68 mV/A |
±5 A / 185 mV/A ±30 A / 66 mV/A |
0–10 A / 400 mv/A 0–30 A / 133 mV/A ±5 A / 400 mV/A ±20 A / 100 mV/A ±50 A / 40 mV/A |
±10 A / 185 mV/A ±20 A / 100 mV/A ±30 A / 66 mV/A |
||||||
| Path resistance: | 1.1 mΩ | 0.6 mΩ | 1.2 mΩ | 1.2 mΩ | 0.7 mΩ | ||||||
| Bandwidth | 120 kHz | 100 kHz | 80 kHz | 120 kHz | 80 kHz | ||||||
| Vcc range:(1) | 3 V–5.5 V | 3 V–5.5 V | 4.5 V–5.5 V | 4.5 V–5.5 V | 4.5 V–5.5 V | ||||||
| Size: | 0.82″ × 0.9″ | 0.7″ × 0.8″ | 0.7″ × 0.8″ | 0.7″ × 0.8″ | 0.7″ × 0.8″ | ||||||
| Special features: | configurable over-current threshold, low-voltage operation, high bandwidth |
over-current fault pin, low-voltage operation |
Differential Hall sensing rejects common-mode fields, high bandwidth |
||||||||
| 1-piece price: | $5.95 | $4.85 | $19.95 | $9.95 | $6.95 | ||||||
| 1 Sensitivity based on when Vcc is 5V. | |||||||||||
Introductory special
As usual, we are offering an extra introductory special discount on the ACS724 current sensor carriers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code ACS724INTRO can get up to five units for just $5.55 each!
Related products





Video: How to Say Pololu!
The name Pololu is simple, but over the years, we’ve noticed some customers mispronouncing our name or hesitating to say it. And if you can’t say our name, how will you tell your friends about us? So if you are unsure about how to say Pololu, I hope this little video will help you out:
New product: Silicone Tires for Pololu wheels
 |
Silicone Tire Pair for 80×10mm/90×10mm (left) and 60×8mm/70×8mm (right) Pololu Wheels. |
|---|
We have recently had several requests for just the tires from our largest Pololu wheels, so here they are! The silicone tires are available in two sizes, with the smaller tire working with our 60×8mm and 70×8mm wheels and the larger tire working with our 80×10mm and 90×10mm wheels. The tires are intended primarily as replacement parts for our wheels, but they can also be used as nicer tires for other similarly sized wheels, such as the 2-5/8″ plastic wheels for Futaba servos.
 |
|
|
|



Related products


Laser-cut teapot coasters
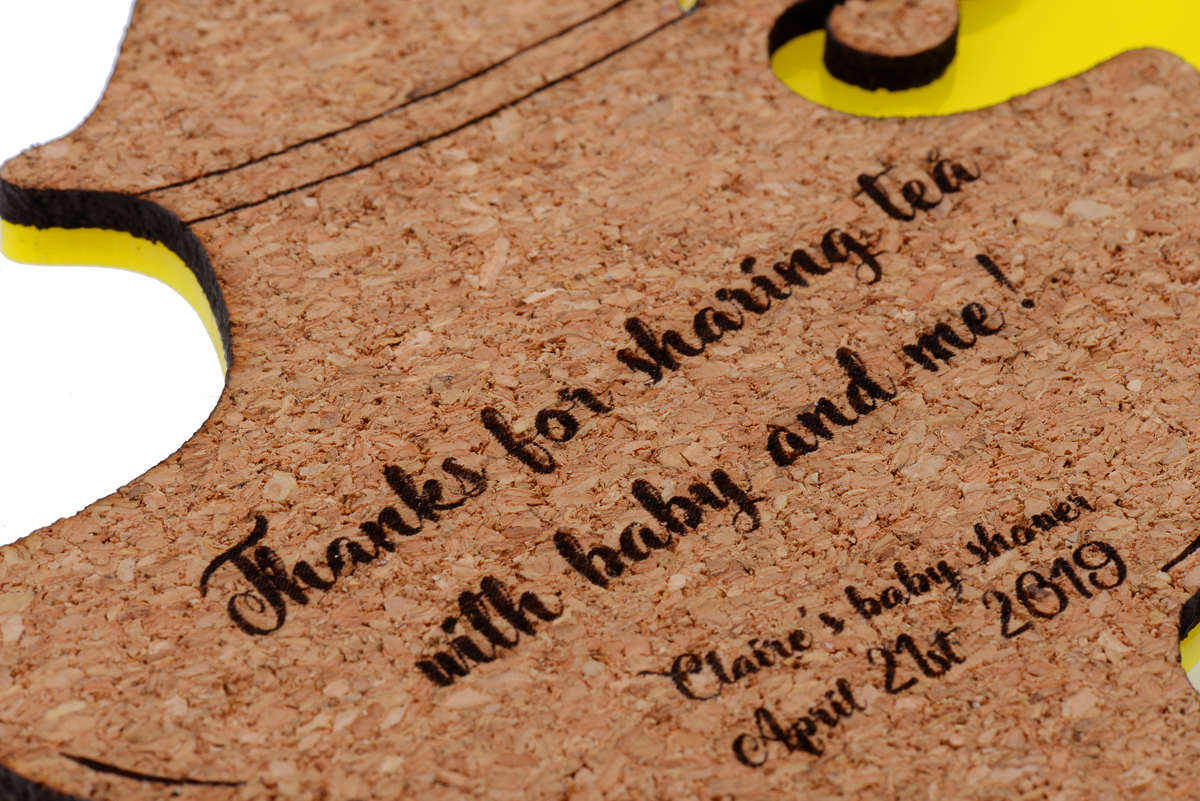
This past weekend my mom hosted a tea-themed baby shower for me, and after looking around and not finding any party favors I liked, I decided to make my own custom laser-cut teapot-shaped coasters for it. To get started, I searched some free vector file sites for a vector file of a teapot that I liked and could easily prepare for laser-cutting with CorelDRAW. I chose this one designed by Freepik. Once loaded into the software, I resized the teapot and added text. I personally really like cork as a coaster material since it keeps the cup from slipping and absorbs moisture well, so I also picked up some 1/8″ cork place mats from IKEA.
Evidently, cork is not a material we are asked to laser-engrave very often, so I had to do some experimenting with the engraving settings before cutting out prototypes.
|
|

I generally liked the look of the first draft, but realized that at 4 inches total width it was too small to be practical (and readable). In addition, the handle of the teapot was fairly fragile since the cork was only an eighth of an inch thick. Below you can see the first draft of the cork teapot in the upper left. It is missing the small circular embellishment at the base of the handle.
 |
Comparison of different test coaster sizes. |
|---|
For the second draft, I increased the size to about 5.5 inches, edited my file to thicken the areas of the teapot where the handle connects to the base, and started playing with different acrylic backings to make the coasters more durable and colorful. I tried a version with an outline around the cork teapot and one that fit directly beneath the cork.
|
|
|



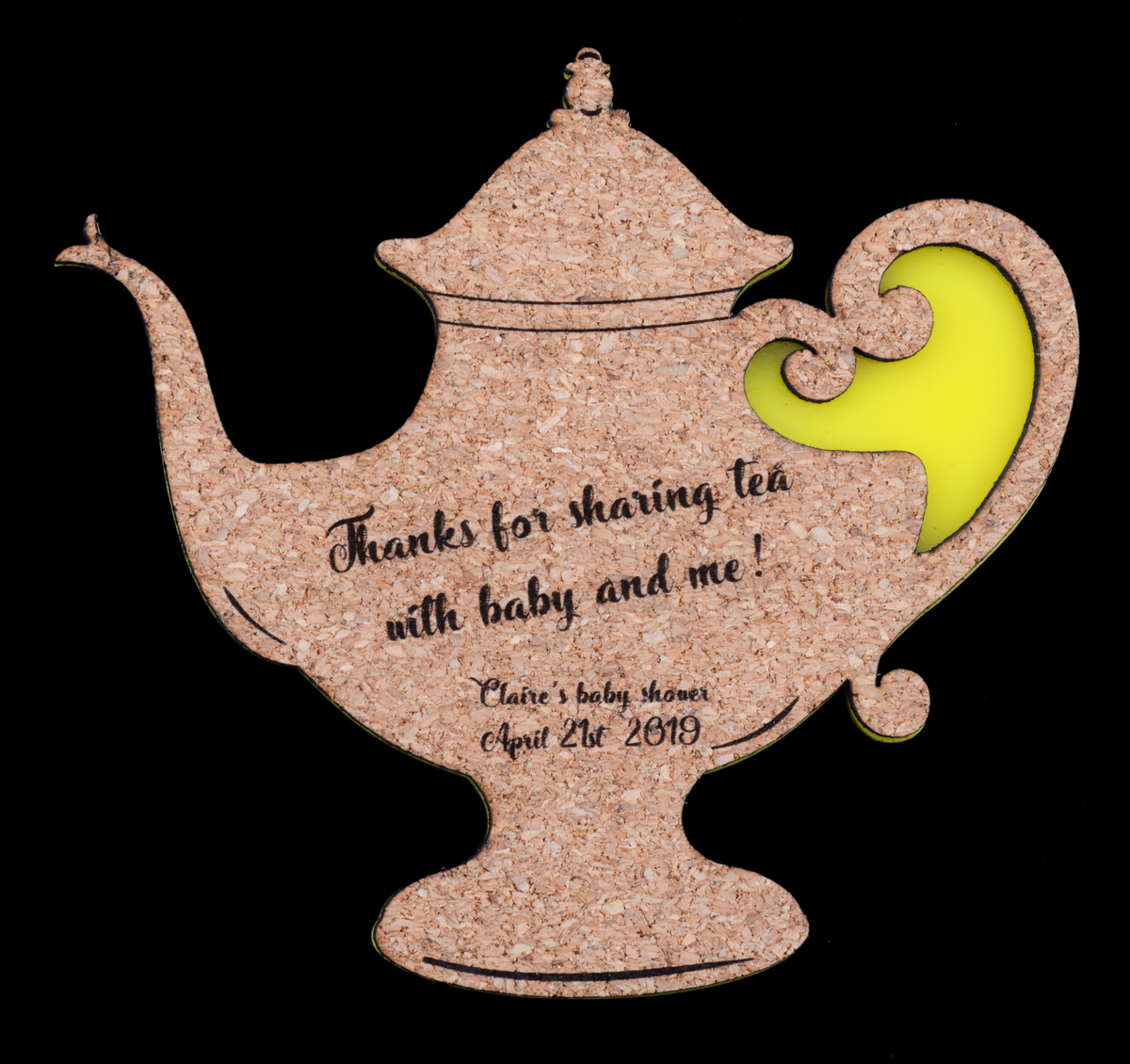
In the end, I went with the sleeker acrylic with no outline, though most of the others I consulted here preferred the mirrored outline shown on the left above (despite my insistence that it looked like a magic lamp). I cut out a variety of colors and glued them to the back of the cork with rubber cement.
|
|
|
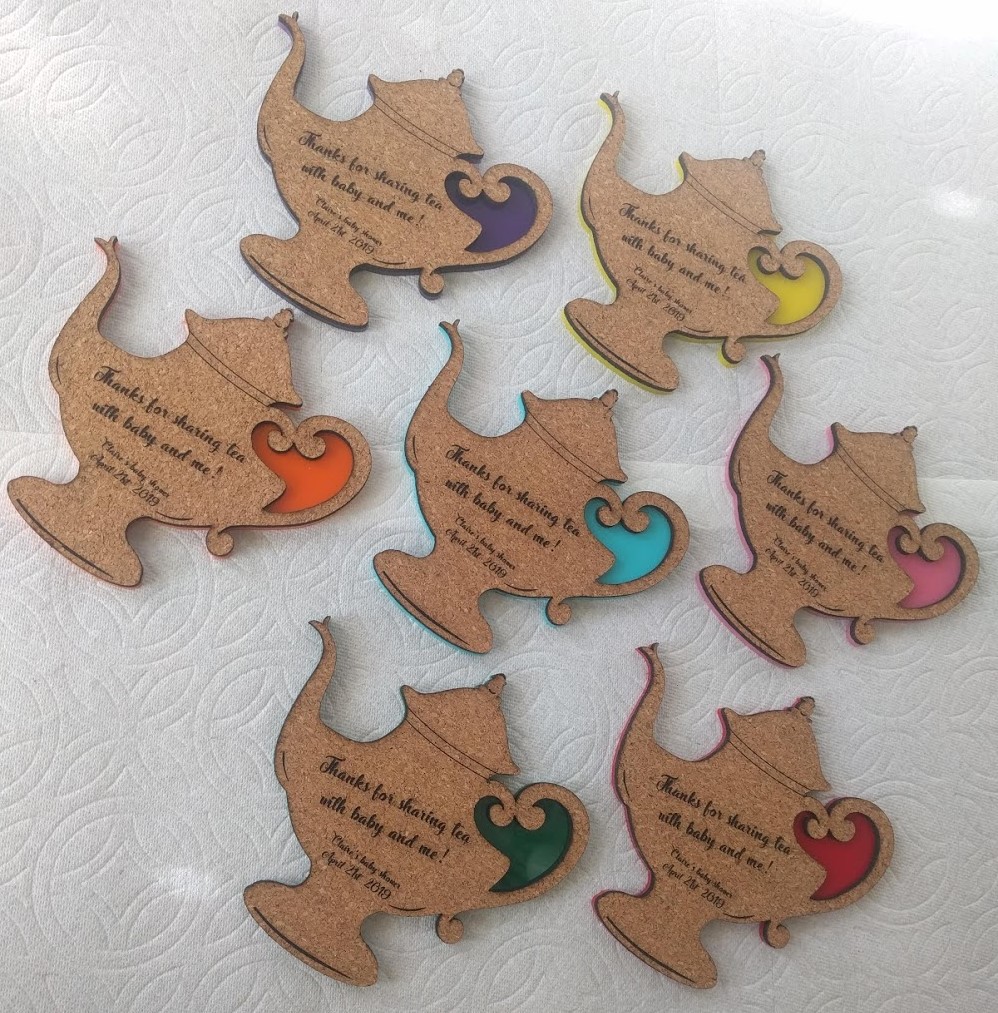

All in all I think they came out well (though I could have made the attachment for the small circle at the bottom of the handle even thicker), and they were definitely a big hit at the party!
If you want to try your own laser cutting project, submit a quote request here!
Related products

New product: DB15 Screw Terminal Adapter for MCP23X/26X Advanced Motor Controllers
|
|


We are now carrying a DB15 Screw Terminal Adapter for MCP23X/26X Advanced Motor Controllers. The adapter breaks out connections from the DB15 connector to a set of screw terminals, making accessing those pins easier during prototyping. It is designed specifically to work with the MCP Advanced Motor Controllers that feature a DB15 connector: the MCP233, MCP236, MCP263, and MCP266. However, it could also be used as a generic breakout board for other hardware that uses the same connector, like old computer joysticks or MIDI devices (where it is called a game port).
Related products





New products: D36V28Fx Step-Down Voltage Regulators
 |
I am happy to announce the release of our newest regulators, the D36V28Fx family of step-down voltage regulators. These regulators support a wide input voltage range (up to 50 V!) and can deliver up to 4 A, making them well suited for use with power-hungry processors like the Raspberry Pi and projects involving servos or small motors.
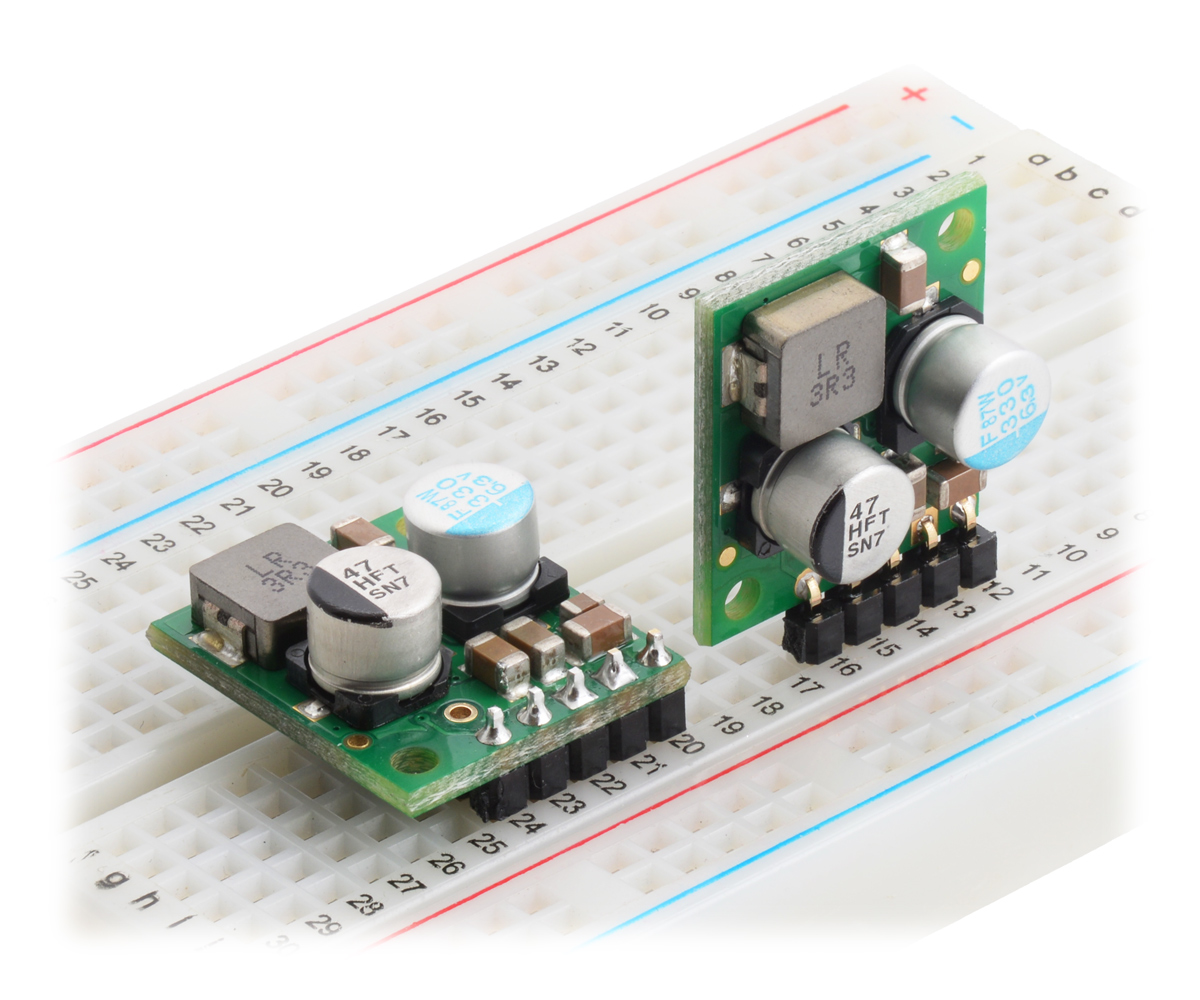 |
Step-Down Voltage Regulator D36V28Fx, assembled on breadboard. |
|---|
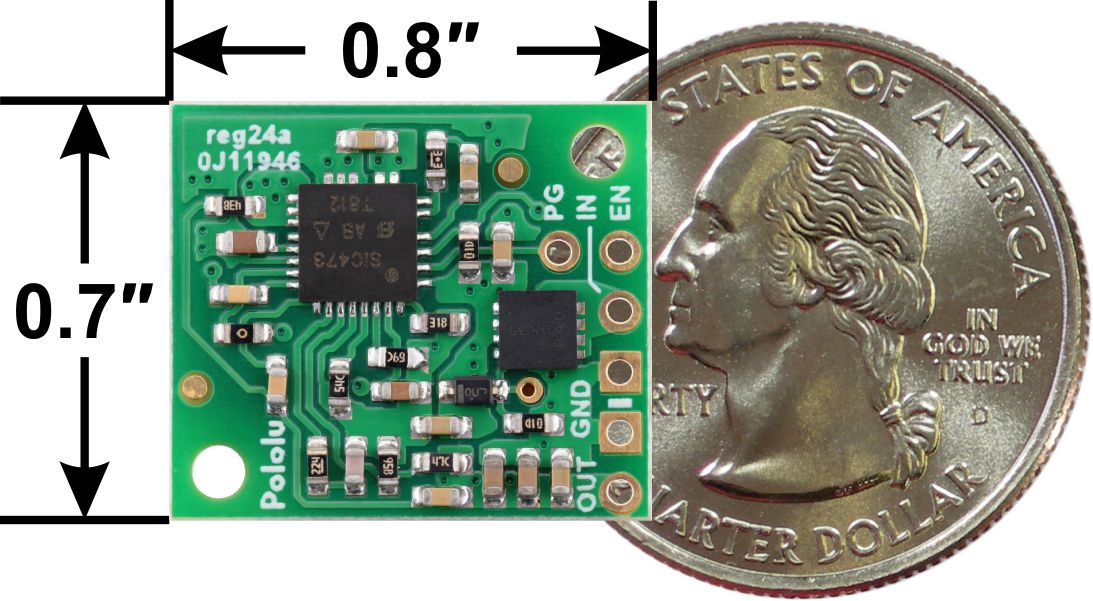 |
Step-Down Voltage Regulator D36V28Fx, bottom view with dimensions. |
|---|
The family consists of six fixed output voltage versions between 3.3 V and 12 V:
- D36V28F3: Fixed 3.3V output
- D36V28F5: Fixed 5V output
- D36V28F6: Fixed 6V output
- D36V28F7: Fixed 7.5V output
- D36V28F9: Fixed 9V output
- D36V28F12: Fixed 12V output
And since we make these ourselves here in Las Vegas, we can also quickly make versions with custom output voltages; please contact us us for more information.
Comparison to the D24V22Fx step-down regulator family
|
|


The D36V28Fx family now becomes our recommended alternative to the slightly smaller D24V22Fx if you need a little more power or operation above 36 V:
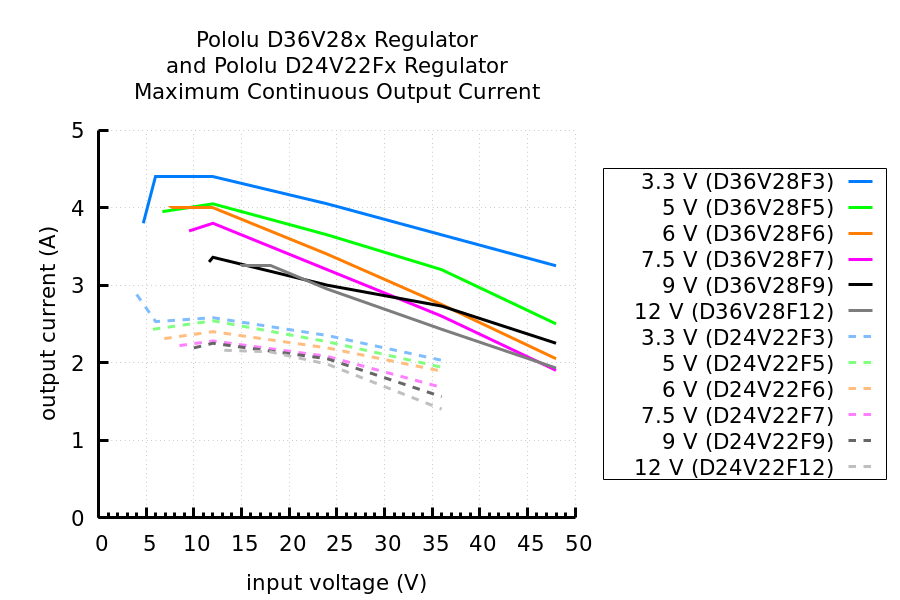 |
Comparison of the maximum continuous current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
The D24V22Fx still outperforms the D36V28Fx when it comes to dropout voltage and quiescent current:
 |
Comparison of the dropout voltage of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
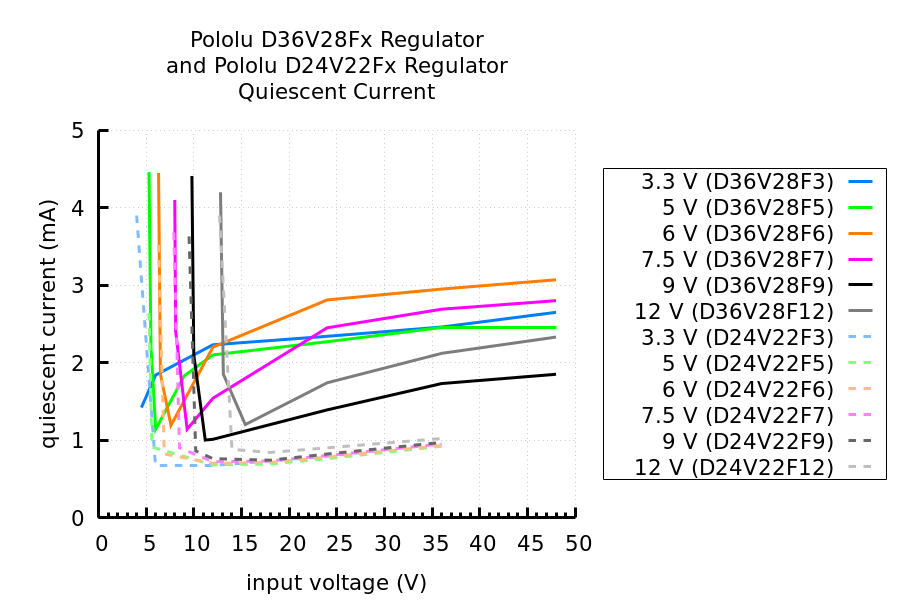 |
Comparison of the quiescent current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
Introductory special
As usual, we are offering an extra introductory special discount on these new regulators, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code D36V28XINTRO can get up to three units for just $7.77 each!
Related products






Pololu National Robotics Week Sale

Next week is National Robotics Week: a week centered on increasing awareness of the robotics industry and the impact that robotics will have on the future. To celebrate, we’re having a sale! All Pololu robot kits and their accessories are 25% off; this includes our 3pi, Zumo, Balboa, and Romi robots. Additionally, all active Pololu-brand items are 20% off, so you can stock up on motor controllers, regulators, sensors and much more! Whether you are a seasoned robot builder or just getting started in robotics, you are sure to find something in this sale for you. Check out the sale page for more information.
New products: ACHS-7121/7122/7123 current sensor carriers

 |
We are excited to offer new carriers for Hall effect-based linear current sensors from Broadcom. These easy-to-use bidirectional current sensors are available in three current range options:
- ACHS-7121 Current Sensor Carrier -10A to +10A
- ACHS-7122 Current Sensor Carrier -20A to +20A
- ACHS-7123 Current Sensor Carrier -30A to +30A
The ±10A and ±30A version have the same output sensitivity as our older ±5A and ±30A Allegro ACS714 Hall effect-based linear current sensor, respectively, so they should work as a drop-in replacement in many applications.
Introductory special
As usual, we are offering an extra introductory special discount on the ACHS-712x current sensor carriers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code ACHSINTRO can get up to five units for just $3 each!
Related products



Kinetic art installation using 24 Maestros to control 576 servos
 |
This wall-mounted kinetic art installation by Alain Haerri redirects light from 576 independently actuated square panels. A flattened segment of an aluminum can, cut to the same square shape as the panel, decorates each actuator, and a small servo allows the decorated panel to pivot up or down. The servo’s positioning of the panel can alter how much light is reflected, effectively making that individual panel appear lighter or darker. Taken together, the array of panels produces an image with enough resolution and speed for delightful and mesmerizing visuals.
At the heart of the operation is an Arduino Mega, which, with the help of our Maestro Arduino library, communicates with 24 Mini Maestros (with 24 channels each) to orchestrate the movement of servos. The Mini Maestros are wired together and connected to a single software serial port on the Mega, which controls all the Maestros using the Pololu protocol at 200 kilobaud. Additionally, the installation has a built-in camera, which allows it to do things like mirror the movement of people standing in front of it, as this video shows:
You can find a write-up of Alain’s project on the Arduino Project Hub, where he also shares his code, a complete parts list, and a couple more videos of the table in motion.




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










