Pololu Blog »
Empty Vessels: a performance of robots, cellos, and artificial intelligence
Artist David Gardener contacted us recently to share his work, Empty Vessels (seen in the above video), an immersive audio visual installation that explores the connection between machines, data, and their environment. The piece features three cellos played by custom built robotic structures that perform music composed in real time. It premiered in November 2019 at the Society for Arts and Technology in Montreal, where it performed for sold out audiences for two weeks! David was kind enough to answer our questions about the piece and allow us to share his answers along with some more footage and pictures with you below:
 |
How long did you work on the piece?
The project started as an idea by myself (David Gardener) and Greg Debicki about a year ago. It remained an idea for most of the year until we were approached by the Society for Arts and Technology in Montreal (SAT) for help funding the project, where we could work on the project as artists in residence. At the end of the residency (in November) we would also premiere the show. This gave the project a very fast timeline taking just two and a half months from concept to presentation for two weeks of shows. I think it is probably the quickest timeline I have ever worked to, having to design, engineer & build the whole project.
Can you tell us which products of ours you used and how they were used in your project?
For the project I used the following components from Pololu:
- 12 x 9.7:1 Metal Gearmotor 25Dx63L mm HP 12V with 48 CPR Encoder (one for each string on each cello)
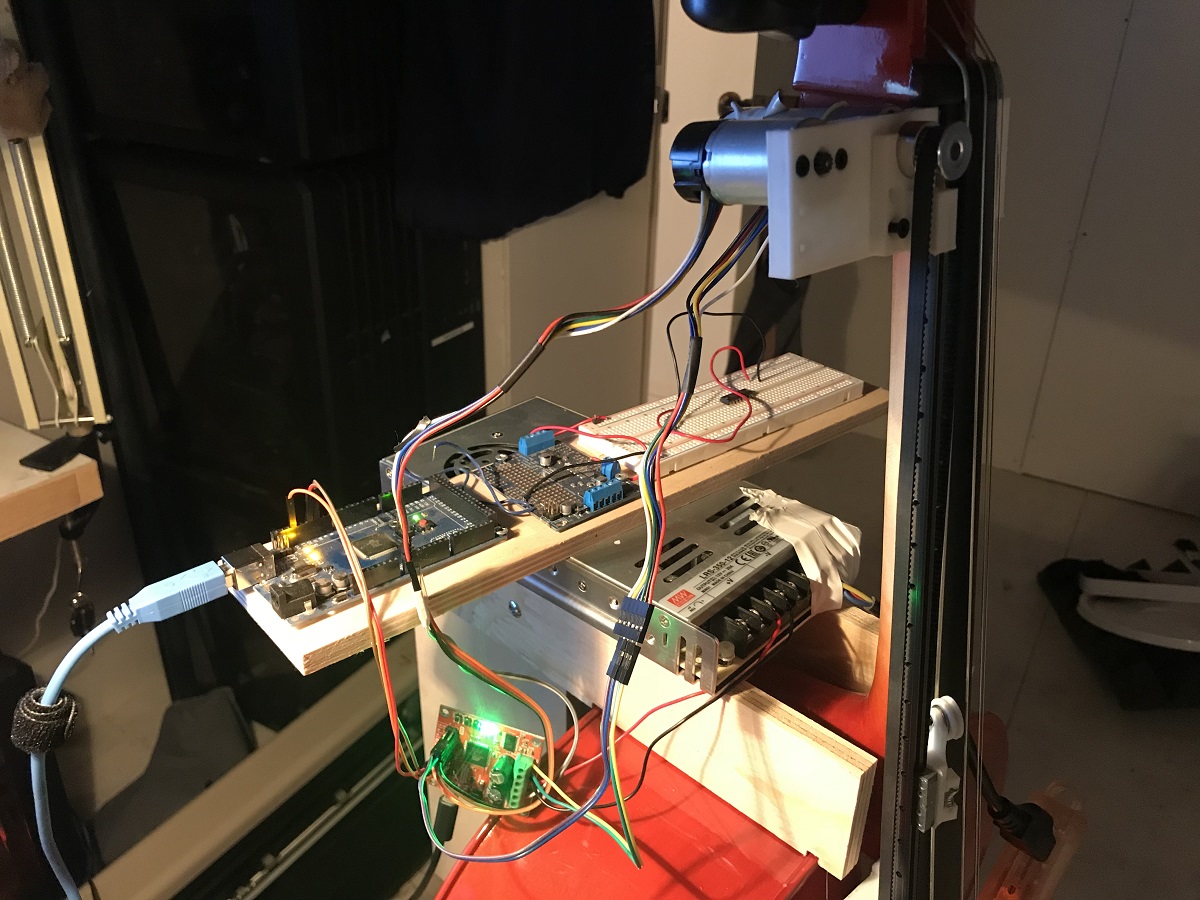
- 6 x RoboClaw 2x7A Motor Controller (two per cello to drive those motors)
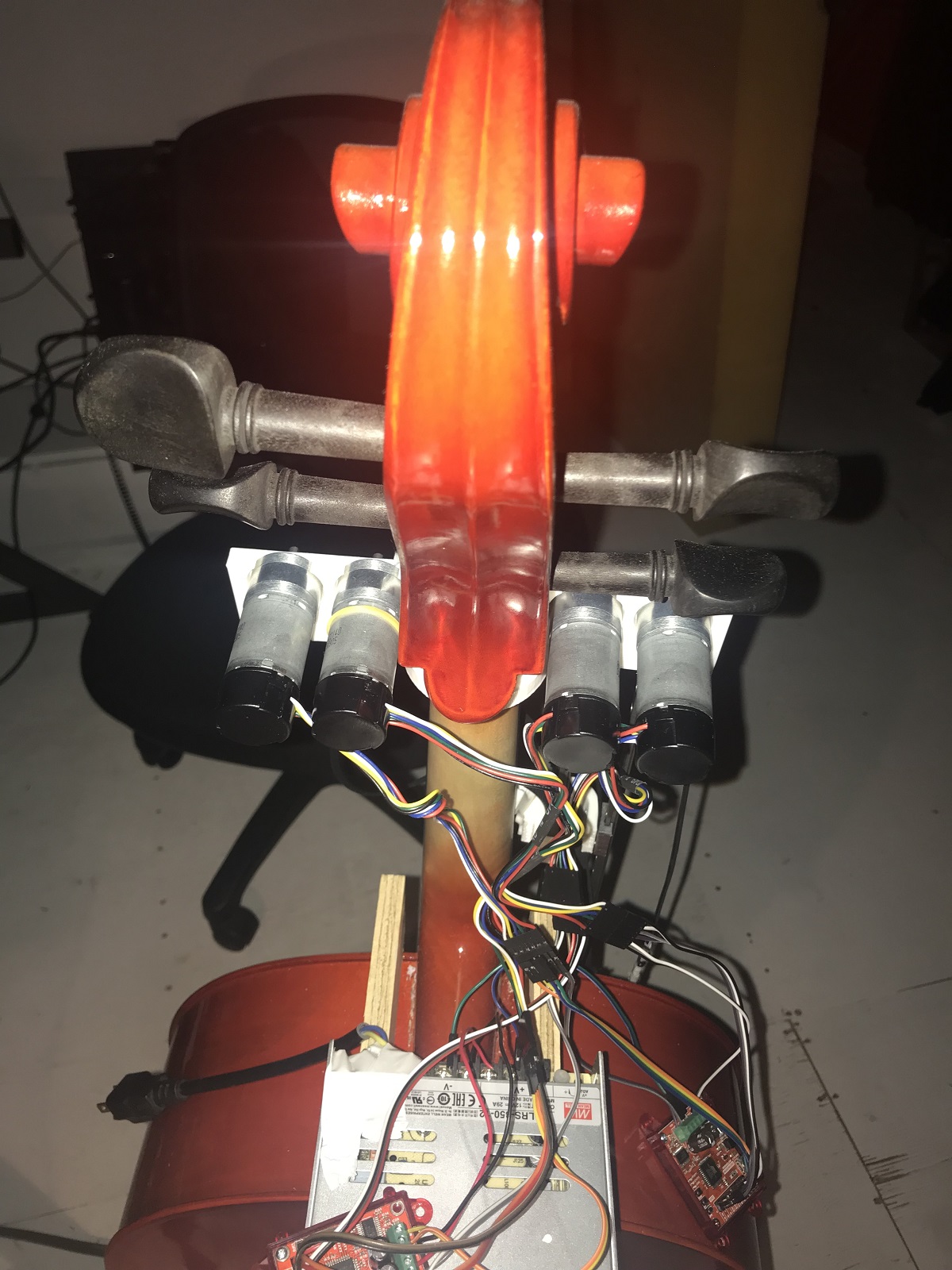
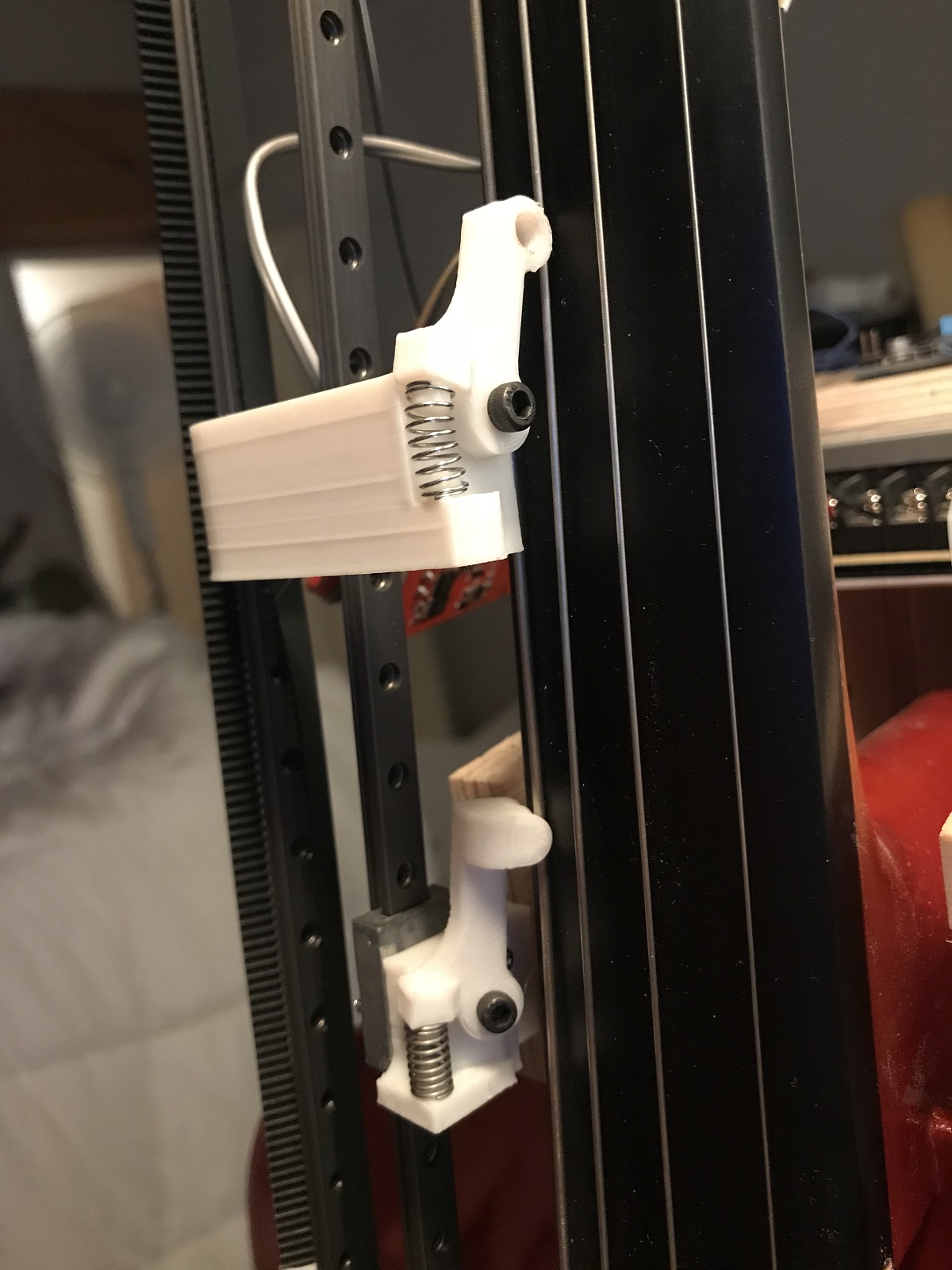
These were used to drive linear slides that moved the note sliders up and down the fingerboard. The reason for using this method was because I am a cellist myself, and the ability to slide between notes is really important in the sound of the cello. Unlike a guitar, there are no frets on a cello’s fingerboard, so the note sliders have to move to very accurate positions on the fingerboard to make sure that the notes are nicely in tune. On startup the motors would all drive the sliders to a home position using a limit switch. From there they would move to the different notes just by driving the motors to pre-defined positions. I decided to use a slider per string on each cello to maximise the amount of notes that could be played simultaneously, meaning they could play 12 note chords, or fast melody lines by splitting the melody across the 3 cellos.
|
|
|

Did you design the slider systems for the fingerboards? It looks like some of the parts might be 3D printed; are the design files available anywhere?
Yes, I designed the whole robotic system from scratch. The cello is such a beautiful instrument in both design and sound. However it is designed specifically for a human body, none of the strings are parallel or in the same plane even, they all diverge towards the bridge. I didn’t want to change the actual instrument in any way for this project. This complicated the build a lot! On top of that, no two instruments are the same, so I had to make sure that the parts could be adjusted in the different planes depending on the instrument they were attached to. Another difficulty is at the top end of the finger board the strings are very close together meaning the sliders all had to be very thin so as not to collide with each other. In the end all these considerations led me to the decision that I would 3D print all the parts. With such a short build timeline, this meant I could design and print revisions of all the parts much quicker than if I was making all the parts by hand in the workshop.
The designs for the parts are not available at the moment as they are very much working prototypes! I plan to upload them for anyone that wants to see them at a stage in the future that I am happy with them.
 |
Can you tell us what your motor control setup is? (What motor drivers are you using, how are you processing the encoders, how are you coordinating all the movement, etc.?)
So I think I answered this in question 2. But a more general overview of the working of the cellos is – The main brain of the three cellos is the software MAX MSP (running on a PC). This would send position data over serial to an Arduino which then told the RoboClaws the next position to send the motors to. The RoboClaws were running in closed loop mode so they were dealing with the encoders directly.
We noticed you have some fans pointed at the upper bank of motors on each cello. Are the motors or controllers overheating, or is that to protect the cellos from getting too warm?
That is funny. Yes, originally I was using your 4.4:1 gear ratio 12 V motors as I really wanted the note sliders to be whizzing up and down the fingerboards like a cello maestro. But after burning out some of the motors by driving them too hard, I decided to switch to the next gear ratio down (and actually even they were getting hot). But by this point I had already locked off the design and ordered all the motors as the opening night for the piece was in three weeks. So to make sure I didn’t lose any more motors, I added some forced air cooling (just a silent fan sat on a bar stool pointed at the motors of each cello)… it added a slight bit of rock ‘n’ roll to the show.
Can you give us some details about how the music is generated?
So the project is headed towards having a fully artificially intelligent score where the music is generated on the spot and then played. The project is designed to also play in a museum environment where it will sit and play for its audience forever evolving music, with the intensity of the compositions controlled by the number of people it is playing to. However, it is currently in a more generative state where it will play music based on a set of musical rules from which it generates the music. This is where my collaborator Greg came into the project, developing patches in MAX MSP that generate the compositions and then work out which string on which cello to send each note to.
Is the piece on exhibit anywhere currently, or are there any planned exhibits coming up?
The piece was shown for a week at the SAT at the end of last year, but it was almost totally sold out so an extra week was added straight after that. The cellos are now back in my studio, where they will be upgraded. They are scheduled for another two weeks of shows at the SAT from March 24th 2020. There are some other shows in Montreal where it will be shown as part of some electronic music and tech festivals (unannounced as of right now). It is then planned for a European tour late summer 2020. It is best to keep track of the dates from my Instagram, @montreal_life_support.
Do you have a website or any social media channels where people can follow your work?
Instagram is probably the best. These are the handles:
- David Gardener: @montreal_life_support
- Greg Debicki: @woulg
Other than that I will be releasing a making-of style video documenting the build in the coming weeks on the YouTube channel.
 |
Cat tax! |
|---|
Thanks so much to David for sharing your work with us and answering all our questions. For readers in the Montreal area near the end of March/beginning of April, visit the Society for Arts and Technology’s website for showtime and ticket information.
Related products


-

New products: Pololu Wheels for Micro and Standard Servos
- 22 January 2020We are thrilled to announce the release of our wheels for micro and standard sized servos. These wheels are similar to our wheels for 3mm D shafts...
-

Coronavirus update - please help Pololu survive
- 22 March 2020TL;DR: Pololu is hurting. Skeleton crew is shipping important products to customers fighting COVID-19 around the world. Most employees facing...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation



