Pololu Blog » Posts tagged “new products” »
Posts tagged “new products” (Page 22)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New high-current stepper driver carrier with SPI: AMIS-30543
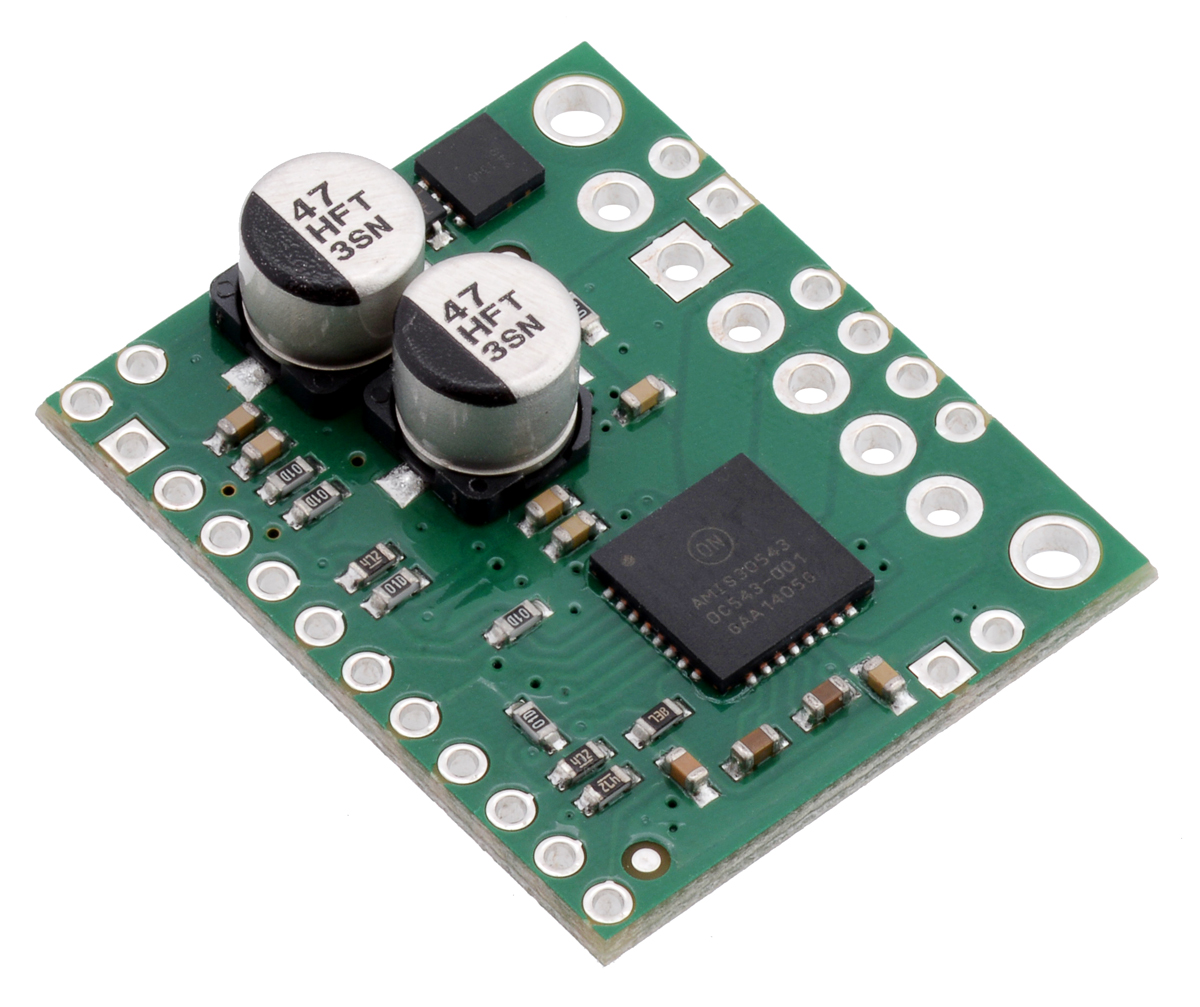 |
This new board is a Pololu carrier for ON Semiconductor’s AMIS-30543 Micro-Stepping Motor Driver, which is a high-performance stepper motor driver with advanced features not found on our other stepper motor driver carriers.
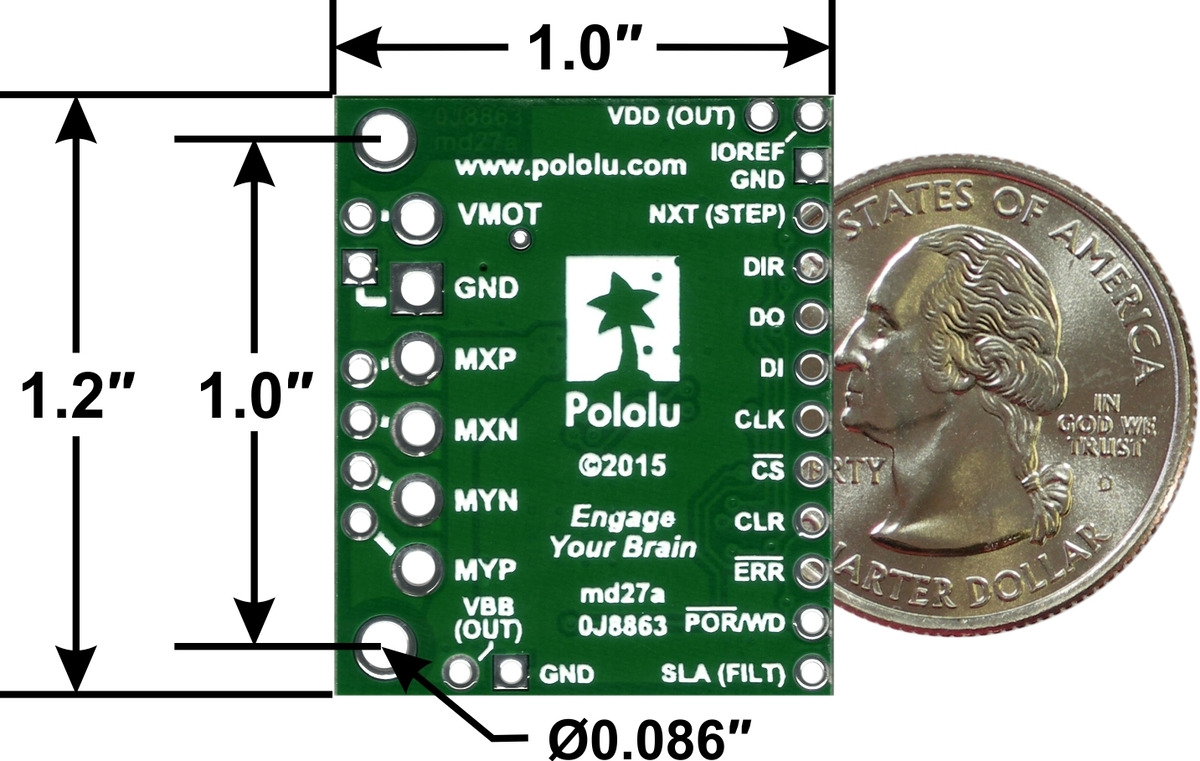 |
AMIS-30543 stepper motor driver carrier, bottom view with dimensions. |
|---|
The Pololu AMIS-30543 Stepper Motor Driver Carrier breaks out all of the important pins of the driver onto breadboard-compatible 0.1"-spaced pins, with optional terminal blocks for the power and motor connections and mounting holes for a more robust setup. Our board supplies reverse protection and all the necessary circuit components for interfacing to a microcontroller.
The AMIS-30543 is rated up to 30 V and 3 A, but (as with other stepper drivers) the current rating is a theoretical maximum assuming excellent cooling. Using our board at room temperature without a heatsink, the chip can practically supply about 1.8 A per coil, more than any of our other stepper motor driver carriers.
The SPI interface of the AMIS-30543 provides many exciting features: it lets you configure microstepping (down to 1/128-step), set the current limit, select voltage slopes, change direction, disable the outputs or put the driver to sleep, monitor the micro-step position and errors, and more. Please note, however, that you cannot step the motor over SPI.
Many of our customers have asked for software current limit control, since it allows better power management. For example, consider that stepper motors counter-intuitively use their maximum current when stopped, even if there is no holding torque required. This wastes a lot of power and generates undesirable heat in the drivers and motors. In a typical application like a 3D printer, where you don’t need much holding torque, you would want to reduce the current limit to a low value during pauses. You might use a higher limit (above the continuous limit) when accelerating and an intermediate value for constant-speed motion. The SPI current limit control on the AMIS-30543 lets you do all of this in your code.
Another advanced feature is the SLA (speed and load angle) output that indicates the level of the back-EMF voltage of the motor. This is an analog signal that can be used for stall detection or closed-loop control of the torque and speed:
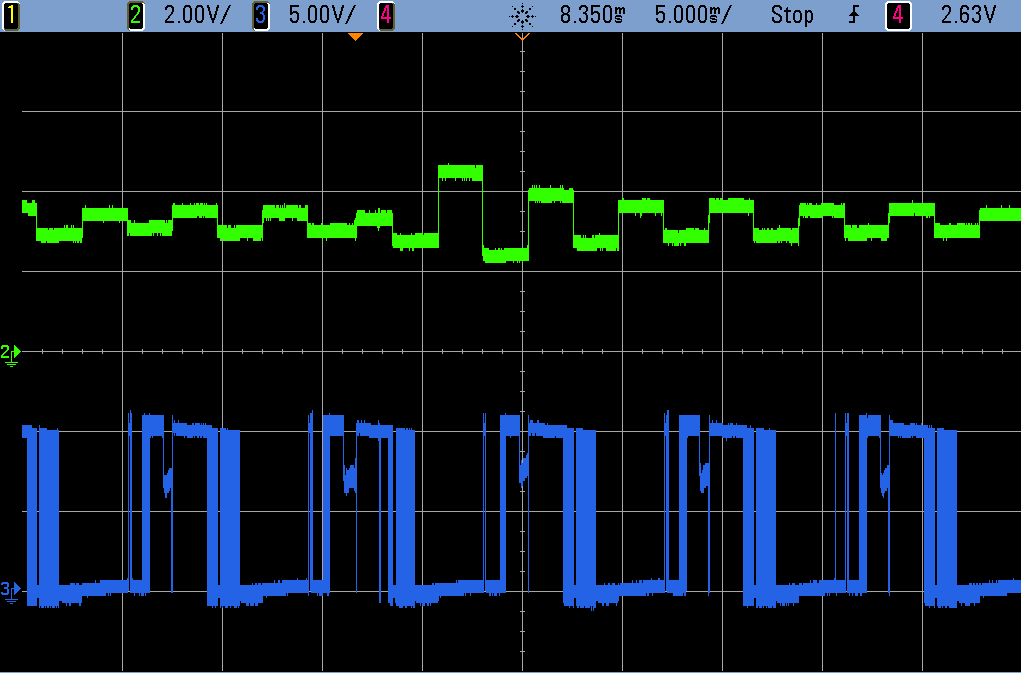 |
AMIS-30543 stepper motor driver SLA output (green) and motor output (blue). |
|---|
It is easy to get started using our Arduino library on GitHub, which provides basic functions for configuring and operating the driver as well as access to many of the advanced features. Please visit the product page for a detailed description, wiring diagrams, the AMIS-30543 datasheet, and more.
Related products

New 0.1″ male header strips
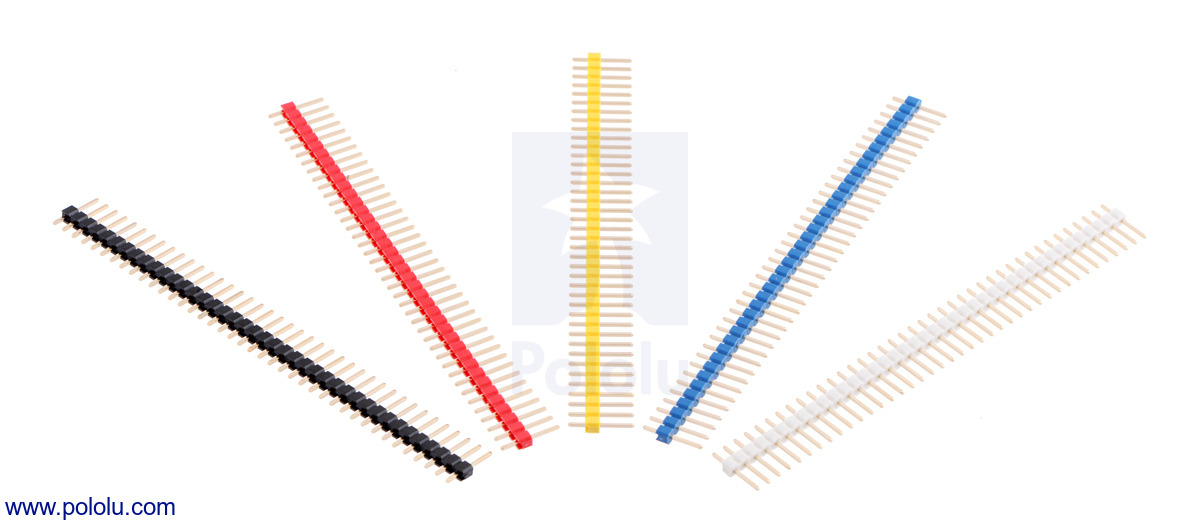 |
Make your next project more colorful with our new red, white, blue, and yellow breakaway male header strips. You can use them to add some personal flair to an otherwise boring PCB, or you can use them to color-code connections, like on this custom-assembled 24-channel Mini Maestro:
 |
Like our venerable black breakaway male header strip, these strips are 40 pins long, but they can easily be cut or broken into smaller strips that work with standard 0.1″-pitch through-holes, female connectors, and breadboards.
We also now have right angle male header strips available in 2 rows or 3 rows:
|
|


We are particularly excited about the 3×40 right angle header because it can be used with the partial kit versions of our Maestro servo controllers to make low-profile modules where the servos plug in from the side rather than the top.
Related products











New products: 40×7 mm wheels
 |
We now have 40mm-diameter wheels (available in black, red, and white) in the same thin style as our 32×7 mm wheels, which help fill the void between those and the 60×8 mm wheels that were previously our next size up.
 |
Black Pololu Wheels with 90, 80, 70, 60, 40, and 32 mm diameters (other colors available). |
|---|
Like the rest of the Pololu wheels, the 40×7 mm wheels press-fit onto the 3mm D shafts on many of our motors, including the micro metal gearmotors and mini plastic gearmotors.
 |
Pololu 40×7mm wheel on a Micro Metal Gearmotor. |
|---|
For more information, take a look at one of the items listed below, or check out all the Pololu wheels category page for more options.
Related products



New product: Sharp GP2Y0A60SZLF Analog Distance Sensor
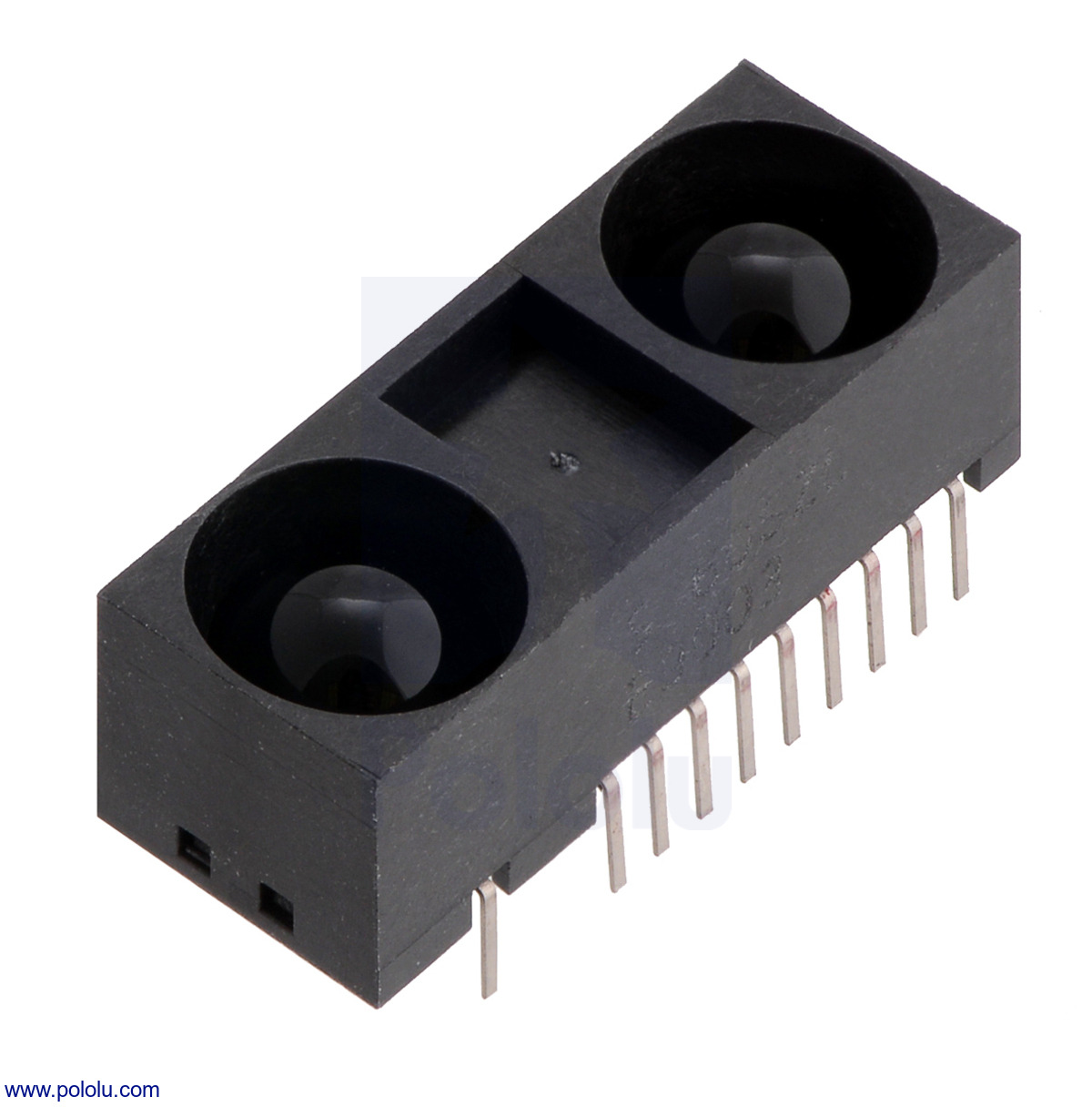 |
We are now offering Sharp’s GP2Y0A60SZLF analog distance sensor by itself. This is a great sensor with a wide 4″ to 60″ (10 cm to 150 cm) detection range and a high update rate of 60 Hz, but it requires additional components to use and has a non-standard 1.5 mm pitch. You can use this sensor with our compact carrier boards to make a complete sensor module, or you can get our carrier boards with the GP2Y0A60SZLF already installed.
For more information, see the GP2Y0A60SZLF product page.
Related products



Free magazines: March 2015 Circuit Cellar and March/April 2015 Elektor
|
|

Get FREE copies of Circuit Cellar magazine’s March issue and Elektor magazine’s March/April issue with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT0315 and ELEKTOR0315 into your shopping cart. The Circuit Cellar magazine will add 6 ounces and the Elektor magazine will add 9 ounces to the package weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers and free Elektor magazine offers.
New products: Stepper motors with lead screws, traveling nut, and mounting bracket for NEMA 23 stepper motors
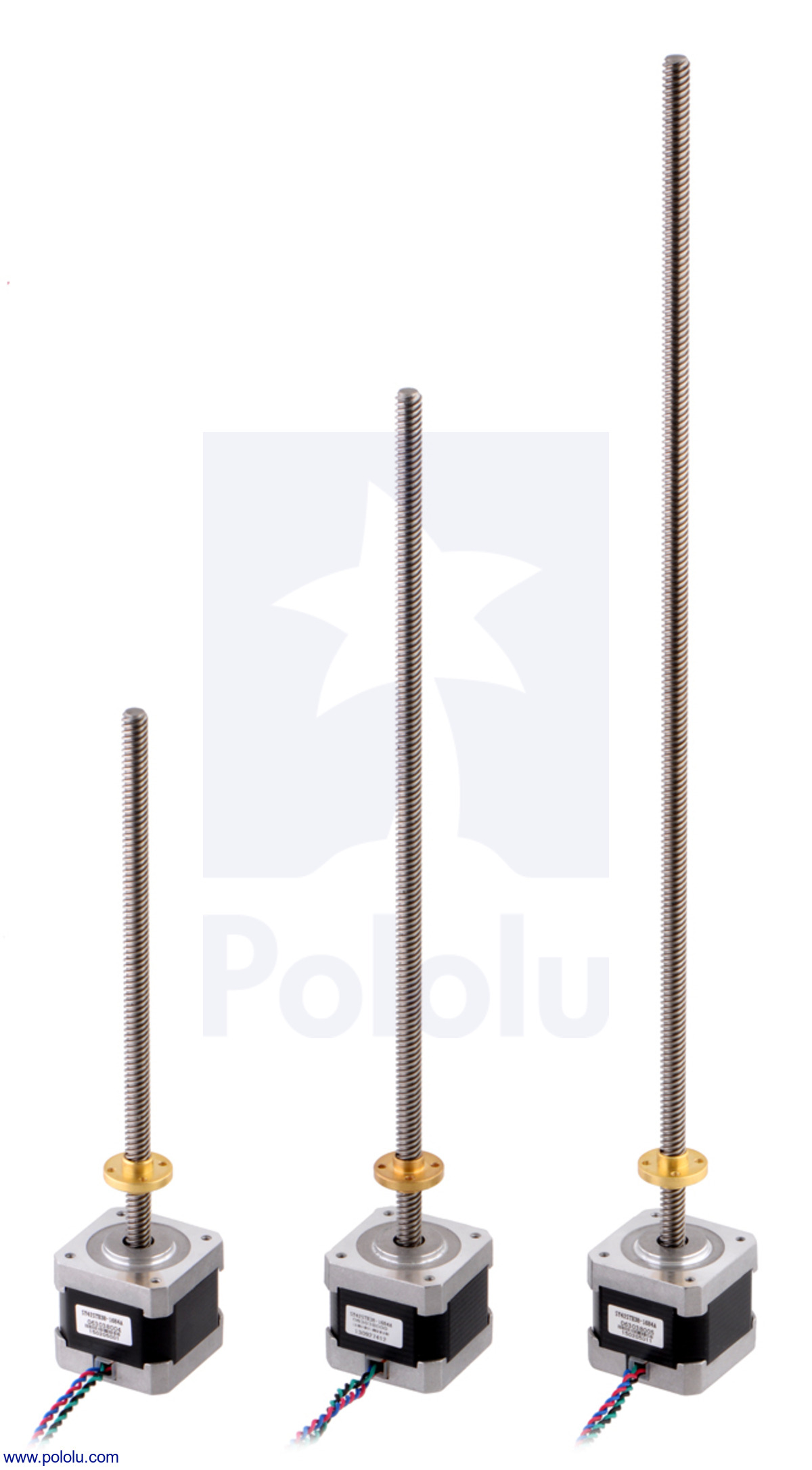 |
NEMA 17-size stepper motors with 18, 28, and 38cm lead screws. |
|---|
Since we started carrying the stepper motor with 28cm lead screw, we have routinely received requests for shorter and longer versions of it, so we are happy to announce that we are now carrying two additional versions: one with an 18 cm lead screw and one with a 38 cm lead screw. All three of the stepper motors with lead screw use the same NEMA 17-size stepper motor, which is also available without a lead screw.
|
|


All of the stepper motors with lead screw come with a traveling nut, also known as a carriage nut. This copper alloy nut features a mounting flange with four holes threaded for M3 screws to make it easy to integrate into your project. From time to time, we also get requests to make the traveling nut available for purchase separately, so we did! If you are interested in picking up some spare traveling nuts, more information can be found on the traveling nut’s product page.
|
|

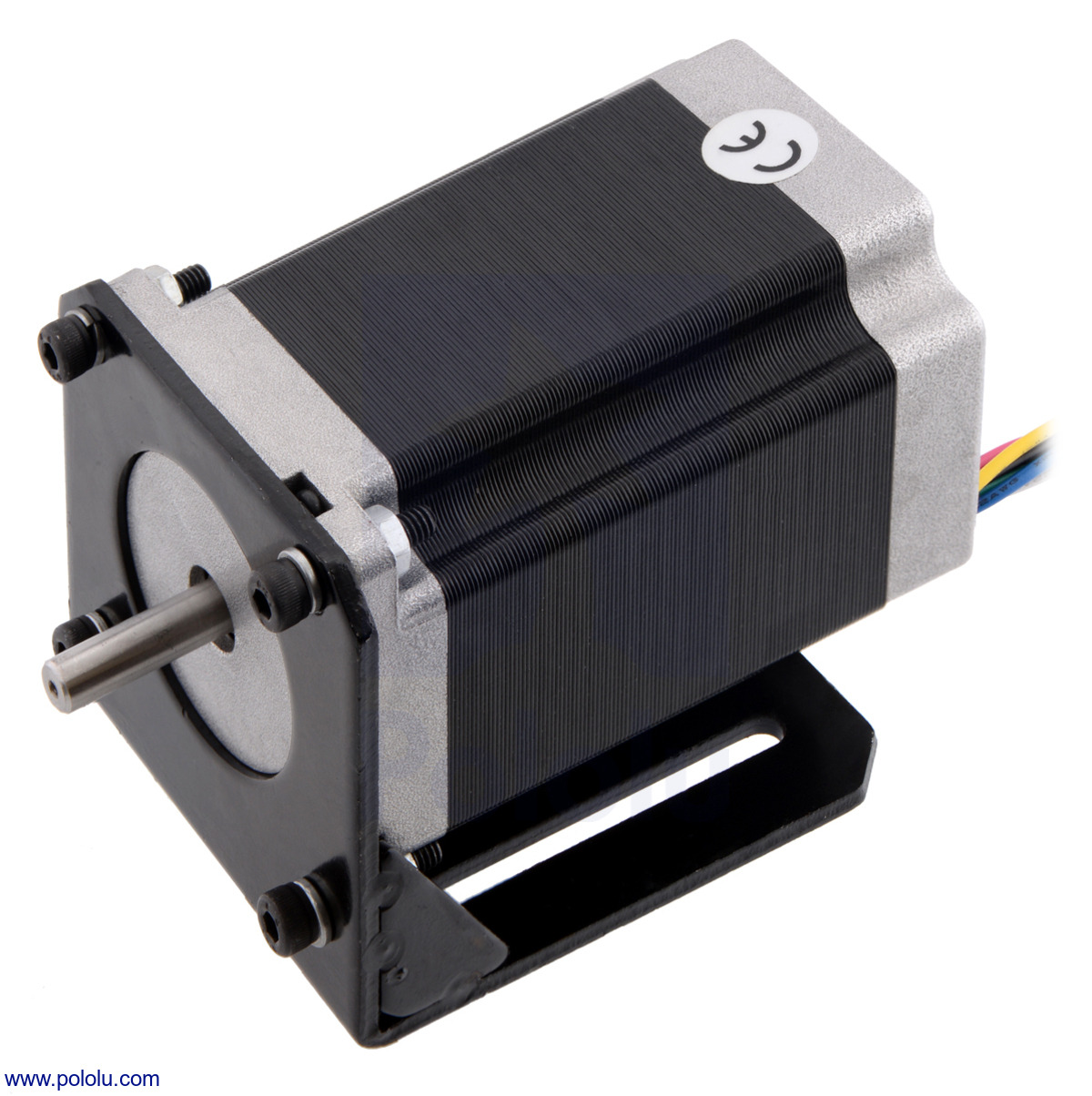
We also have a new NEMA 23 stepper motor bracket as pictured above. Around eight months ago, we started carrying our stamped aluminum mounting bracket for NEMA-17 size stepper motors, and since then, we added a stamped aluminum NEMA 14 stepper motor bracket to our selection. We looked into getting similar aluminum bracket for NEMA 23-size stepper motors but ultimately decided to go with a more rigid 3mm-thick steel mounting bracket for NEMA 23 stepper motors. On this bracket, two steel supports are welded in the corner along the bend of the bracket to provide extra reinforcement.
Related products




New product: Zumo 32U4
 |
I am excited to announce the release of our new Zumo 32U4 Robot Kit, a complete Arduino-compatible robot kit based on the ATmega32U4. We have, in some sense, been working on this robot for about seven years.
 |
One of our major long-term goals at Pololu is to be making complete robots, and many of the parts we make are stepping stones toward that goal. The first real step toward the Zumo started back in 2008, shortly after we started carrying our micro metal gearmotors, when we released the compatible wheels shown at right. The intent was that they could be used with either tires or tracks and optionally with encoders, and that eventually they would be a part of our own robot.
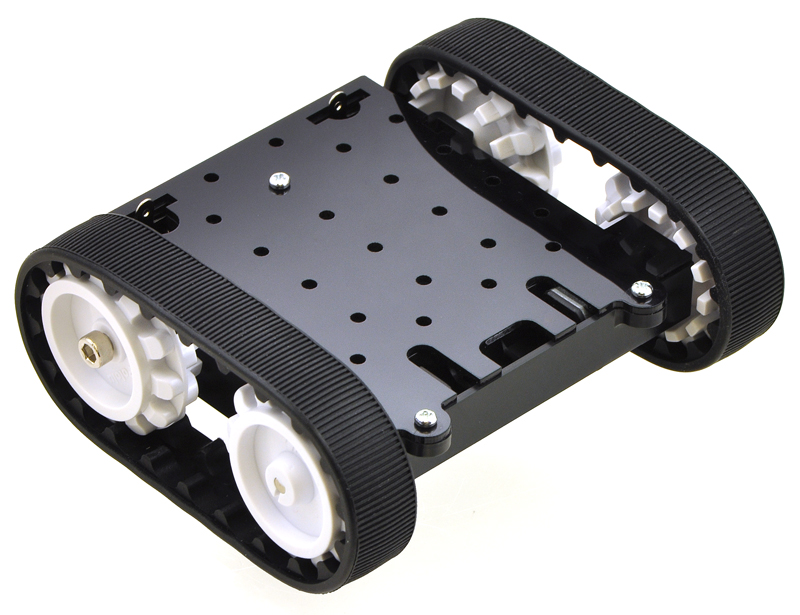 |
A few years later we had assembled enough parts to release the Zumo chassis. We planned to use this as the base for a complete robot, but by releasing it first as a component, we got to see the community do a lot of interesting things with it. (Check out this Raspberry Pi Zumo, for example.)
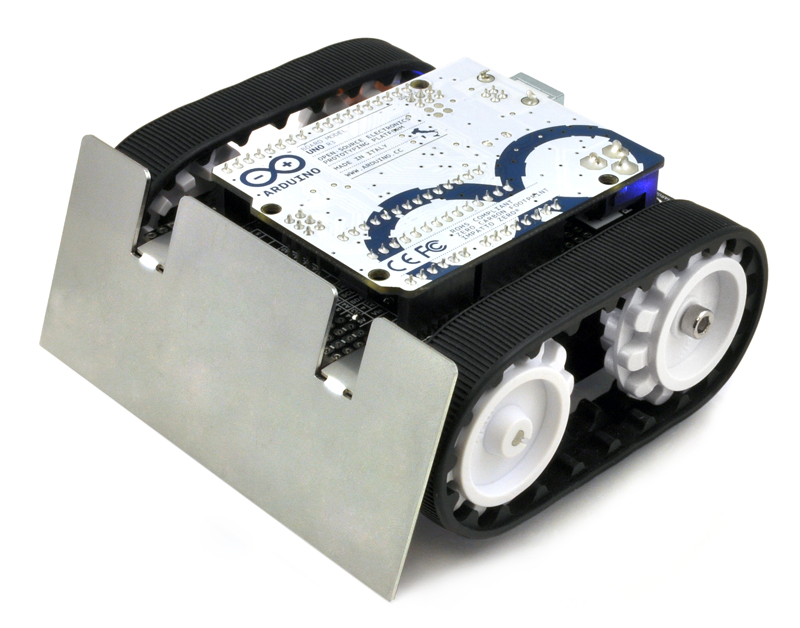 |
It was not until 2012 that we were able to announce a complete robot, the Zumo Robot Kit for Arduino, which combined all of these parts with a new board containing a boost regulator, motor drivers, and inertial sensors. The board works like an upside-down shield: you plug an Arduino onto the top of the robot. We released a compatible reflectance sensor array soon after that, making it possible to use the Zumo for everything from mini-sumo to maze-solving.
So we sort of had a new complete robot, but it was not quite complete enough for us, since it still required a separate Arduino, which we did not manufacture. Also, the upside-down shield configuration blocked a lot of space for expansion and prototyping, we lacked a good solution for obstacle/opponent sensing (that’s important for mini-sumo!), and we had received lots of requests for encoders, which are hard to squeeze into the available space. A lot of our effort in 2013 and 2014 went toward components that we thought could be used on a more complete Zumo, such as smaller quadrature encoders and 38 kHz IR proximity sensors. And developing our A-Star 32U4 line of Arduino-compatible controllers based on the ATmega32U4 helped integrate the Arduino functionality directly into the robot.
So finally we had all the pieces available to make a new, much more capable Zumo that would be completely Pololu, the Zumo 32U4 robot:
 |
The Zumo 32U4 incorporates many features of the A-Star 32U4 Prime LV, including an ATmega32U4 microcontroller with an Arduino-compatible USB bootloader and a step-up/step-down voltage regulator system. There is a handy 8×2 character LCD on top and a buzzer for simple beeps and music. Like the Zumo Robot for Arduino, our kit includes dual motor drivers, a complete 9-axis IMU, and line sensors, but the new integrated quadrature encoders and proximity sensors make this a far more capable platform.
We are initially offering the Zumo 32U4 robot only as a kit. Soldering is required, and it is intended for more advanced or ambitious electronics builders. There are a number of build options – two different kinds of IR LEDs are included and you choose your motor gear ratio – and the construction gives you opportunities to show off your craftsmanship. Some Pololu engineers, for example, have been 3D-printing custom LED holders that mount onto the blade of their Zumos. The Zumo is also expandable; almost all of the I/O lines of the ATmega32U4 and the power and ground nodes are available on arrays of through-holes at the sides and front of the board, and with its low-profile design (you can remove the LCD) there is plenty of room to build on top.
While we hope we have left enough room for physical customizations, the programming, with all the sensing options, is where you can really give your robot personality and make it your own. Modulate the IR emitters for more precise opponent detection, use the accelerometer to detect a bump or a flip (sans LCD, the Zumo can drive upside down), measure distances with the encoders, measure turns with the gyros, … we are looking forward to see what you will come up with!
As we gain experience with the Zumo 32U4 robot and collect feedback from the community, we plan to release more supporting materials and offer assembled options. Our goal is to get it to the point where we can recommend the Zumo to anyone looking for a high-performance programmable robot – hobbyists, students, educators, and others – so stay tuned! Please check out the product page for more details about the robot, and take a look at our example code on GitHub.
Related products

New Product: SparkFun Inventor's Kit (for Arduino Uno)
 |
This new version of the SparkFun Inventor’s Kit brings back the Arduino Uno (the previous version had an Arduino-compatible SparkFun RedBoard).
The SparkFun Inventor’s Kit has everything you need to construct a variety of circuits that will teach you how to use an Arduino to read sensors, display information on an LCD, drive motors, and more. No previous programming or electronics experience is necessary, which makes this a great way for beginners to get started with embedded systems.
For more information, see the product page.
Related products

New product: iMAX B6AC V2 Balance Charger and Discharger
 |
We have carried the iMAX B6AC charger from SkyRC for many years and often use it to charge batteries for our own projects and robot contests, so we are happy to now be carrying the upgraded iMAX B6AC V2 Balance Charger and Discharger. Both versions of the iMAX B6AC are capable of charging or discharging NiMH, NiCd, Pb, LiPo, Li-ion, and LiFe batteries and can be powered either from AC mains power or a DC input. The new version of the charger has all the same advanced features as the original, like individual cell balancing for up to 6 lithium cells, delta-peak sensitivity, and cyclic charging and discharging. In addition, version two of the charger is more accurate, more stable, and has many new features. Some of the new features include a Micro-USB connection for interfacing with SkyRC’s ChargeMaster PC software and upgrading the firmware, user control over the final battery voltage when charging, individual lithium cell voltage display, and an internal resistance meter.
 |
Bottom view of the iMAX B6AC V2 showing the holographic label with scratch-and-reveal security code. |
|---|
There are many counterfeit chargers that look almost identical to SkyRC products, so as with the first version, we buy these directly from SkyRC and take care to ensure that our units are genuine. If you would like to double check the authenticity of the iMAX B6AC V2 that you receive, you can reveal the security code under the scratch-and-reveal portion of the holographic label on the bottom of the charger and enter it on the SkyRC web site.
Need batteries for your charger? While we do carry some basic NiMH cells and packs, we recommend that you check out the options at local stores and online, since government restrictions, shipping, and storage issues make this a tough area for a small business to compete in. For larger packs and lithium batteries in particular, there are a number of hobby supply stores shipping from Hong Kong or China that provide excellent options.
For more information about the iMAX B6AC V2 and its features, please see its product page.
Related products


New product: A-Star 32U4 Prime SV
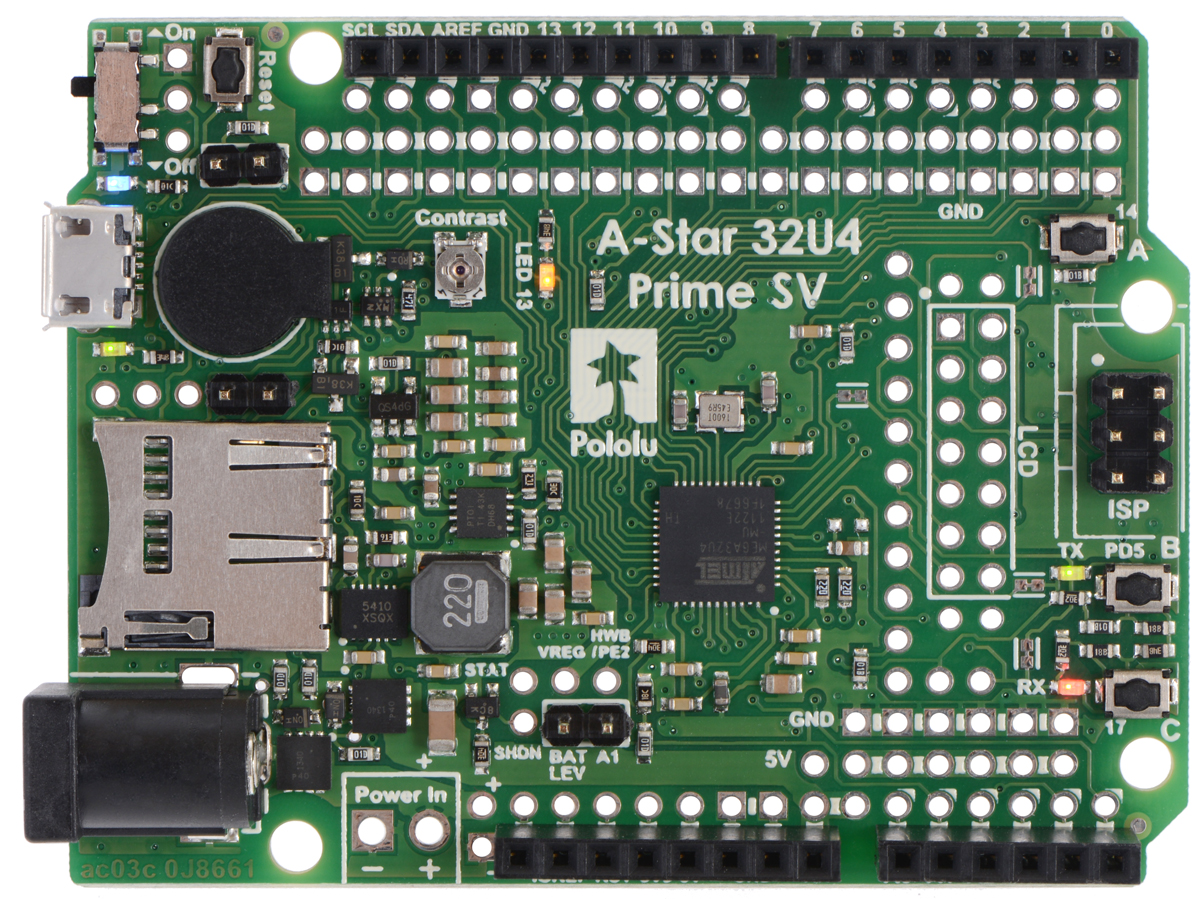 |
It has been snowing on and off today in Las Vegas, but luckily the weather was not bad enough to delay our last product release of 2014: the A-Star 32U4 Prime SV. We hope that this and the other A-Stars we released this year will help bring success to your projects in 2015. Thanks for your business and support in 2014, and Happy New Year!
The A-Star 32U4 Prime SV, our newest A-Star, is an Arduino-compatible board with a switching regulator that allows an input voltage range of 5 V to 36 V. Like the A-Star 32U4 Prime LV we released earlier this month, the A-Star 32U4 Prime SV shares the pinout and form factor of the Arduino Leonardo and should work with compatible shields.
 |
What really sets the A-Star 32U4 Primes apart from competing products is their power supply system based on high-efficiency switching regulators, which allow plenty of power to drive your microcontroller and lots of peripherals over a large range of input voltages. The A-Star 32U4 Prime SV uses the Intersil ISL85410 1-Amp buck regulator, a more powerful relative of the regulator on A-Star 32U4 Mini SV. So you get 1 A at 5 V over most of the SV input voltage range. (We recommend an input voltage of at least 6 V.) And since a switching regulator draws less current as the voltage increases, you can get a lot more out of higher-voltage power supplies and battery packs. In a typical usage scenario, if you power your project with a 12 V battery, the A-Star 32U4 Prime SV will draw about half the current of a competing product with a linear regulator – and last twice as long on a single charge.
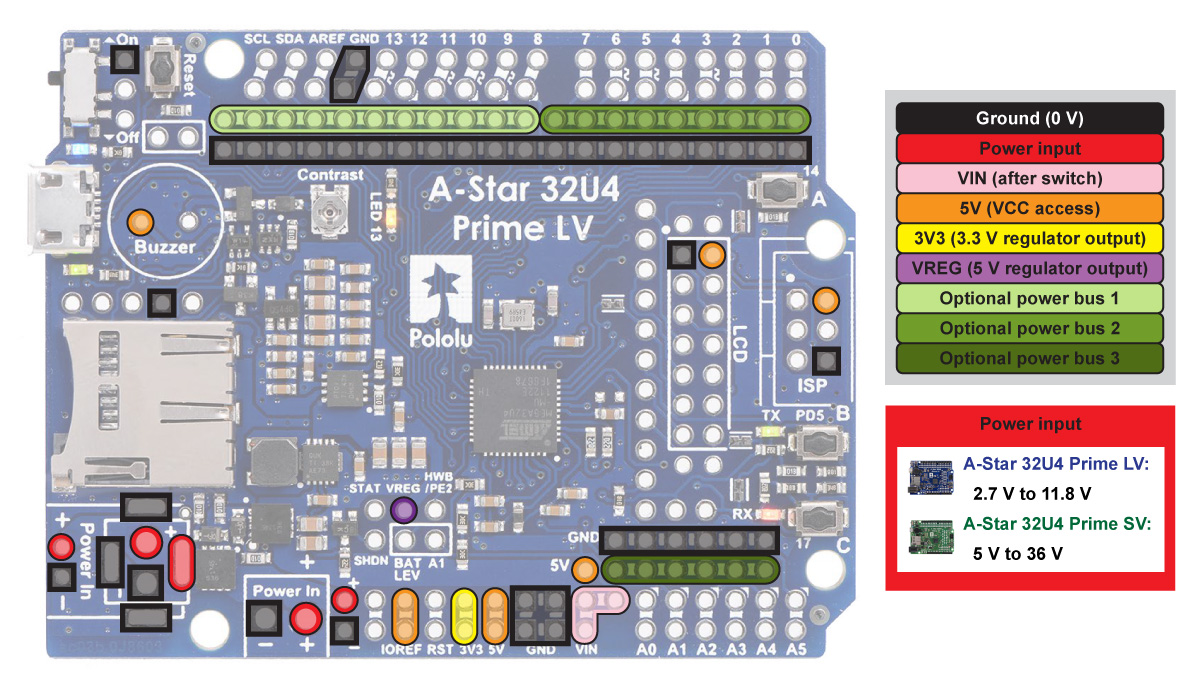 |
A-Star 32U4 Prime power distribution diagram (original ac03b version). |
|---|
Like the A-Star 32U4 Prime LV, the SV has a bunch of features designed to make it easy for you to make use of the power. The TPS2113A USB power mux allows you to safely and seamlessly switch between a battery and USB power (up to 1.5 A using a powerful enough USB supply), without the limitations of diodes or fuses. We included a handy power switch for your external power input, extra connection options in case you don’t want to use the standard DC power jack, extra access points for the important power nodes VIN, VREG, 5V, and 3V3, and big power and ground buses.
The A-Star 32U4 Prime SV includes all the same peripheral features as the A-Star 32U4 Prime LV: battery voltage monitoring, three user pushbuttons (sharing the MISO, RXLED, and TXLED lines), a buzzer optionally controlled by digital pin 6, a connector for an HD44780-based character LCD, and – on some models – a microSD card slot that works with the Arduino SD library. Here is an SV with all the optional peripherals installed:
 |
You can purchase this configuration pre-assembled as Pololu item #3115, or get it with almost everything but the LCD as Pololu item #3114. (You can still install an LCD yourself later.) For other configuration options, please see the individual product pages below or the A-Star 32U4 Prime SV category page.
Related products









Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










