Pololu Blog » Posts tagged “new products” »
Posts tagged “new products” (Page 20)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: Pololu Ball Caster with 1″ Plastic Ball and Ball Bearings
|
|


Our ball caster with 1″ plastic ball is now available with ball bearings instead of plastic rollers for even better performance!
Related products


New Pololu 60×8mm wheels for FEETECH FS90R micro servos
 |
Continuous rotation servos like FEETECH’s FS90R are popular actuators for beginner robots because of their low cost and ease of use—since the motor controller is built right into the actuator, it can be controlled directly from a microcontroller or RC receiver. However, to complete the drive system, you need wheels, and that is something that we have not been able to offer for the FS90R until today. I am excited to introduce the new 60×8mm wheels for FS90R micro servos, which should make it much easier to get your FS90R-based miniature robot rolling.
|
|


All that said, we still generally recommend creating custom drive systems out of individual motor drivers, DC motors, and wheels over continuous rotations servos, since that gives you much more control over performance. Continuous rotation servos are more appropriate for projects where cost and simplicity are more important than performance, and with these wheels and the FS90R, this approach is simpler and more affordable than ever.
Related products


New products: Assembled Zumo 32U4 robots
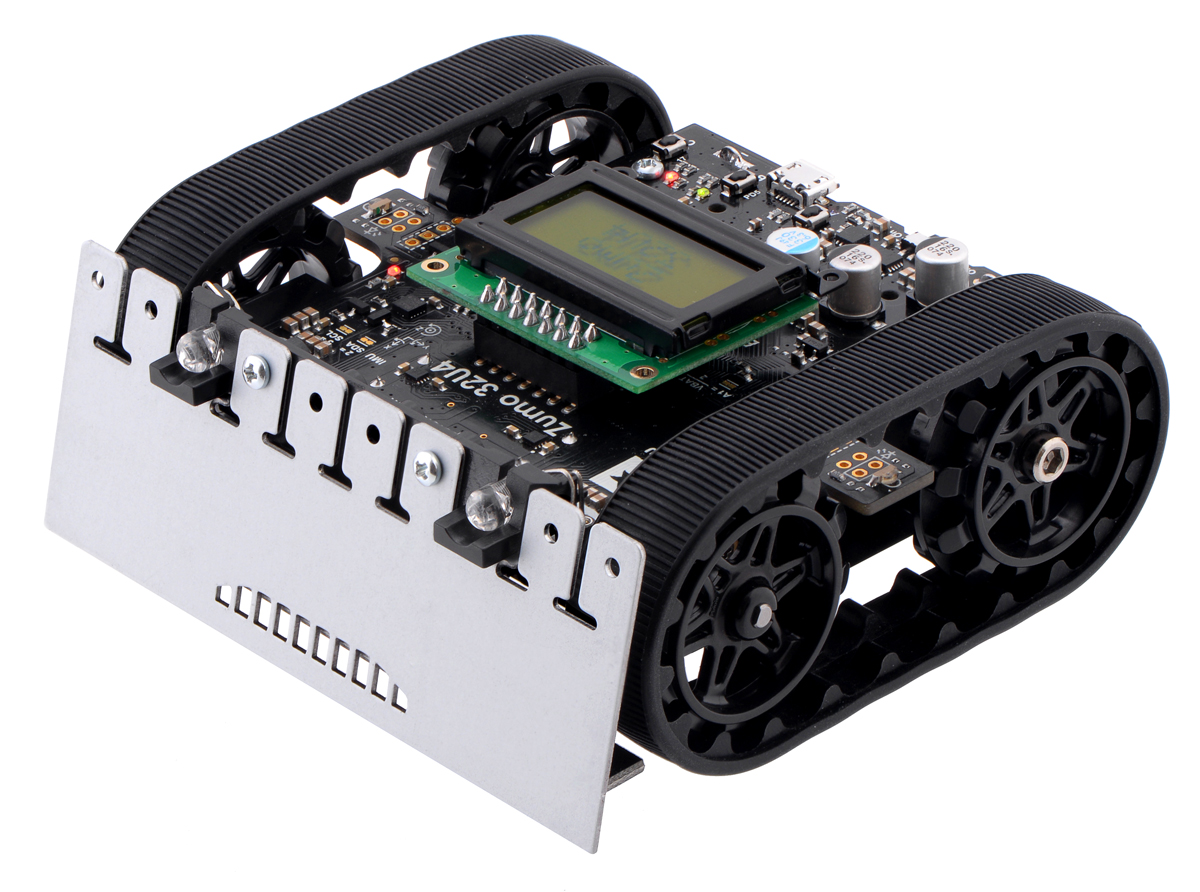 |
Customers have been requesting an assembled version of our Zumo 32U4 robot kit ever since we released it in March, so it makes me very happy to be able to announce that we now have three pre-assembled Zumo 32U4 robots to choose from:
The three options differ only in their motors, and while the speed and torque vary across the three gear ratios, the peak output power is the same for all of them. You could maximize speed (i.e. 50:1 motors) or torque (100:1 motors), or perhaps you are looking for something in the middle (75:1 motors). The following table compares the gear ratio in more detail, with the first four columns showing specifications of the gearmotors by themselves and the last showing the measured top speed of a Zumo chassis loaded to a weight of 500 g:
| Micro Metal Gearmotor |
Free-Run Speed @ 6V |
Stall Torque @ 6V |
Stall Current @ 6V |
Top Zumo Speed @ 6V and 500g |
|
|---|---|---|---|---|---|
| 50:1 HP | 625 RPM | 15 oz·in | 1600 mA | 40 in/s | (100 cm/s) |
| 75:1 HP | 400 RPM | 22 oz·in | 1600 mA | 25 in/s | (65 cm/s) |
| 100:1 HP | 320 RPM | 30 oz·in | 1600 mA | 20 in/s | (50 cm/s) |
These three gearmotors are the ones we consider best suited for typical Zumo 32U4 applications (and many of our example programs are tuned to work with 75:1 HP motors), but we have many other gear ratios available that you can use when assembling the kit version of the Zumo 32U4 robot.
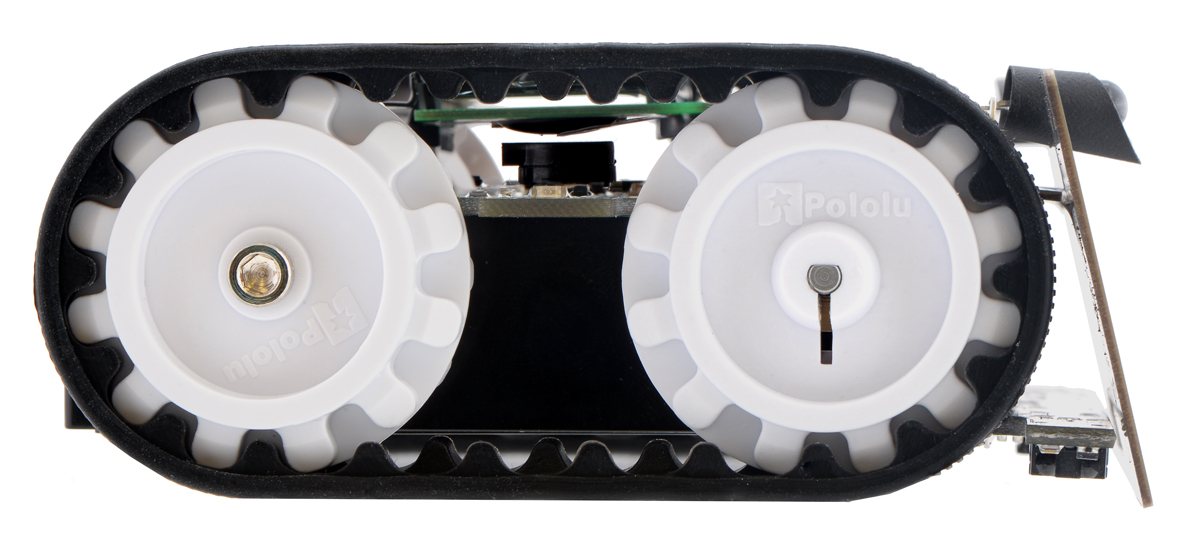
At this point, you might be wondering why it took so long for us to make an assembled Zumo 32U4 robot. Well, we have been working on several improvements to the Zumo 32U4 ever since releasing the kit, and we wanted to have them all in place before coming out with these more finished assembled products. The first improvement was to the sprockets, which changed from white with solid hubs to black with spokes. These new sprockets fit better on the motor shafts and make assembly and disassembly easier, and we think they just look cooler! They might also help you hide from your opponent’s IR sensors, but the color is of course no use against other sensing technologies like sonar.
|
|

The second improvement was to make a new component to hold and shield the IR LEDs used by the proximity sensor system. Without this, the LEDs are just supported by their leads and shielded by a piece of heat shrink (see the pictures above), and we wanted something better. Now the kit and assembled versions include a plastic LED holder that mounts directly to the front blade:
|
|


Finally, we have improved the blade. They are now stamped rather than laser-cut, and we have added cutouts around the general-purpose mounting holes so that they can be hand-bent to new angles as desired, independent of the blade angle. This new blade also has the chassis mounting tabs pre-bent to the appropriate angle, so that’s one less step required during assembly of the kit.
|
|


And speaking of the kit, we still strongly encourage people to get the Zumo 32U4 kit and build it themselves. We designed the Zumo 32U4 to be a starting point, and building it yourself will make you more comfortable with customizing and enhancing it. Making it yourself will also make it a little more meaningful when your robot triumphs over the competition!
Related products


Cable for Sharp GP2Y0A51SK0F analog distance sensors now available
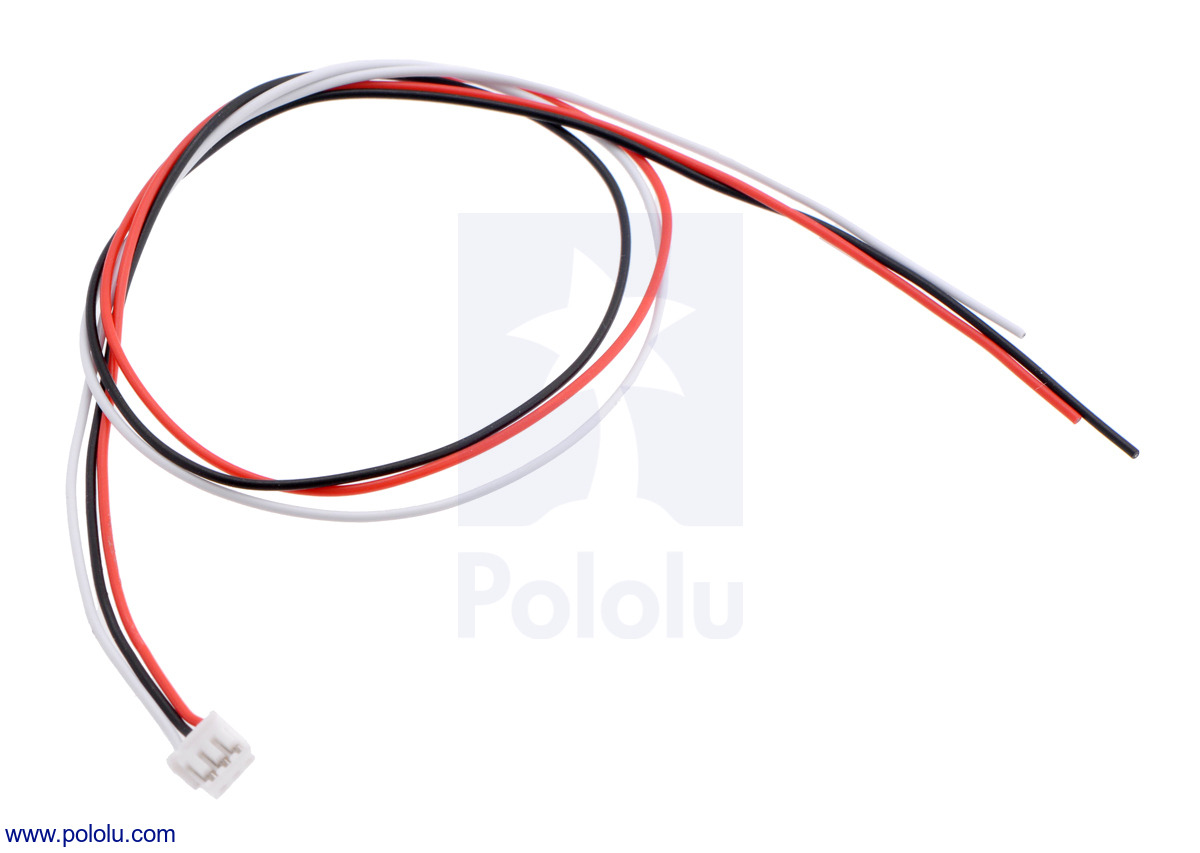 |
We are now finally carrying a cable for the Sharp GP2Y0A51SK0F Analog Distance Sensor 2-15cm. The GP2Y0A51SK0F, our shortest-range analog distance sensor, has a compact package with a unique JST ZH-style connector, so this cable will not work with any of our other distance sensors. The cable is 12 inches (30 cm) long, with wires that you can cut and terminate as necessary for your project.
For more information, see the product page.
Related products


New product: A-Star 32U4 Robot Controller with Raspberry Pi Bridge
 |
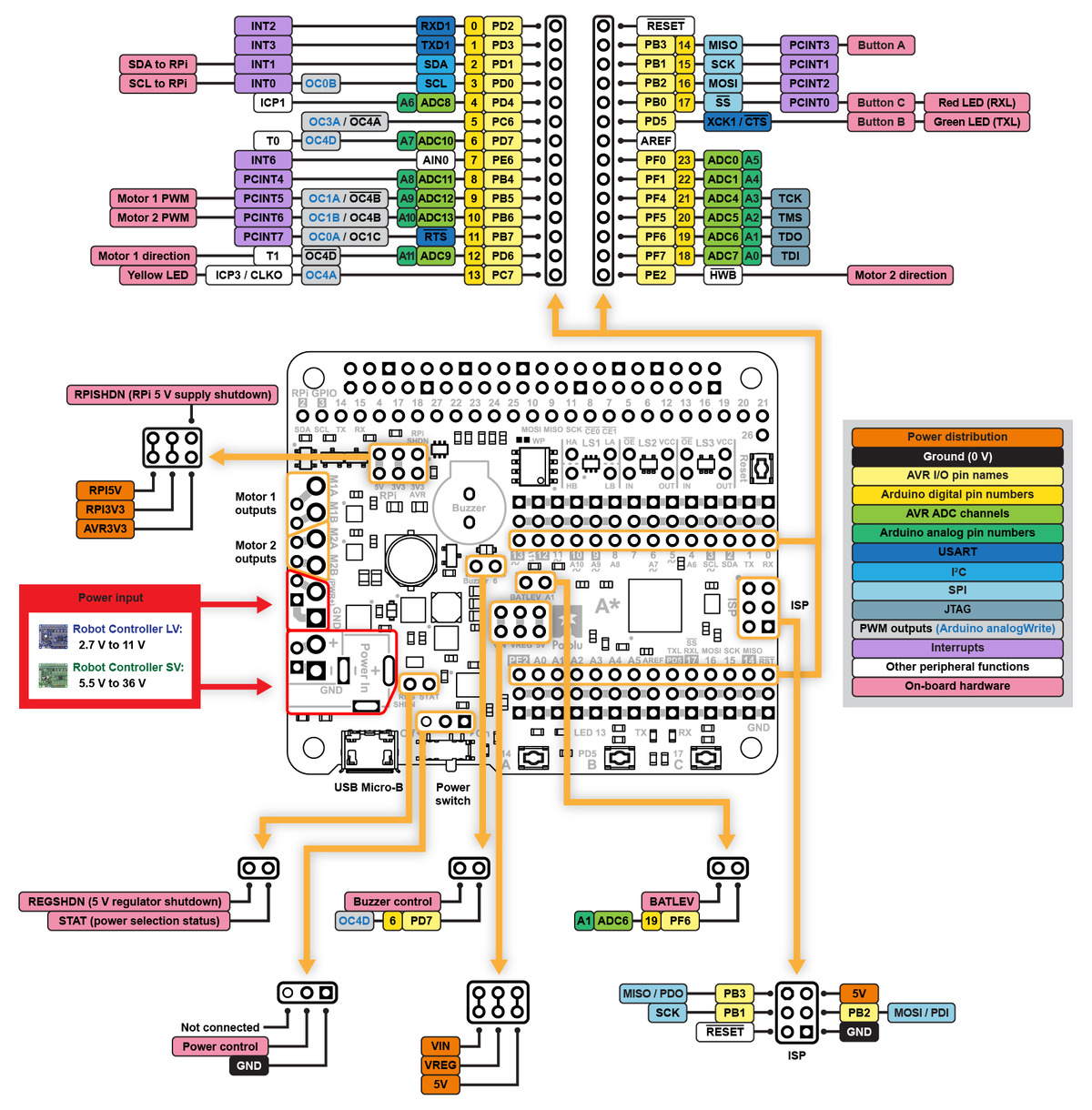
I am excited to announce our new A-Star 32U4 Robot Controller LV with Raspberry Pi Bridge, a general-purpose robot controller based on Atmel’s ATmega32U4 microcontroller.
This new robot controller is the latest model in our A-Star line of Arduino-compatible USB microcontroller boards. We started with the A-Star 32U4 Micro and have been gradually expanding the line, adding peripherals and various form-factor and voltage options, with the goal of eventually replacing our older Orangutan robot controllers. The Zumo 32U4 was a major step in that direction, since its controller board is essentially an A-Star 32U4 plus extra peripherals for motor control and sensing. But while the Zumo 32U4 is a complete robot kit, this board is for people who want to design their own robot.
The A-Star 32U4 Robot Controller LV includes most of the features of the A-Star 32U4 Prime LV, including an Arduino-compatible USB bootloader, an efficient step-up/step-down regulator, and handy peripherals like the buzzer and buttons, and it expands on the A-Star line by adding a pair of Texas Instruments DRV8838 1.8 A motor drivers, the same motor drivers as on the Zumo. All of the AVR’s GPIO lines are broken out, and we have included handy power and ground rails so you can easily connect lots of things like servos and sensors:
 |
This board is well-suited for small robots that would have otherwise used an Orangutan controller like the SV-328 or SVP-1284. While we did not include an LCD like on the Orangutans, you can get far better display, monitoring, or data logging by making use of the Raspberry Pi connection, which I will talk about next.
Using the robot controller with a Raspberry Pi
The Raspberry Pi is a great board for an embedded project that needs serious computational power or connectivity. We have released a couple of Raspberry Pi motor driver boards over the past year, which give you a way to get started exploring robotics with your Raspberry Pi. But robotics projects tend to use a lot of analog sensors, timing-sensitive devices like servos, and other peripherals that are not compatible with the limited I/O capabilities of the Raspberry Pi. These types of things are what microcontrollers are designed for, so you can do a lot more if you pair your Raspberry Pi with a complete microcontroller board.
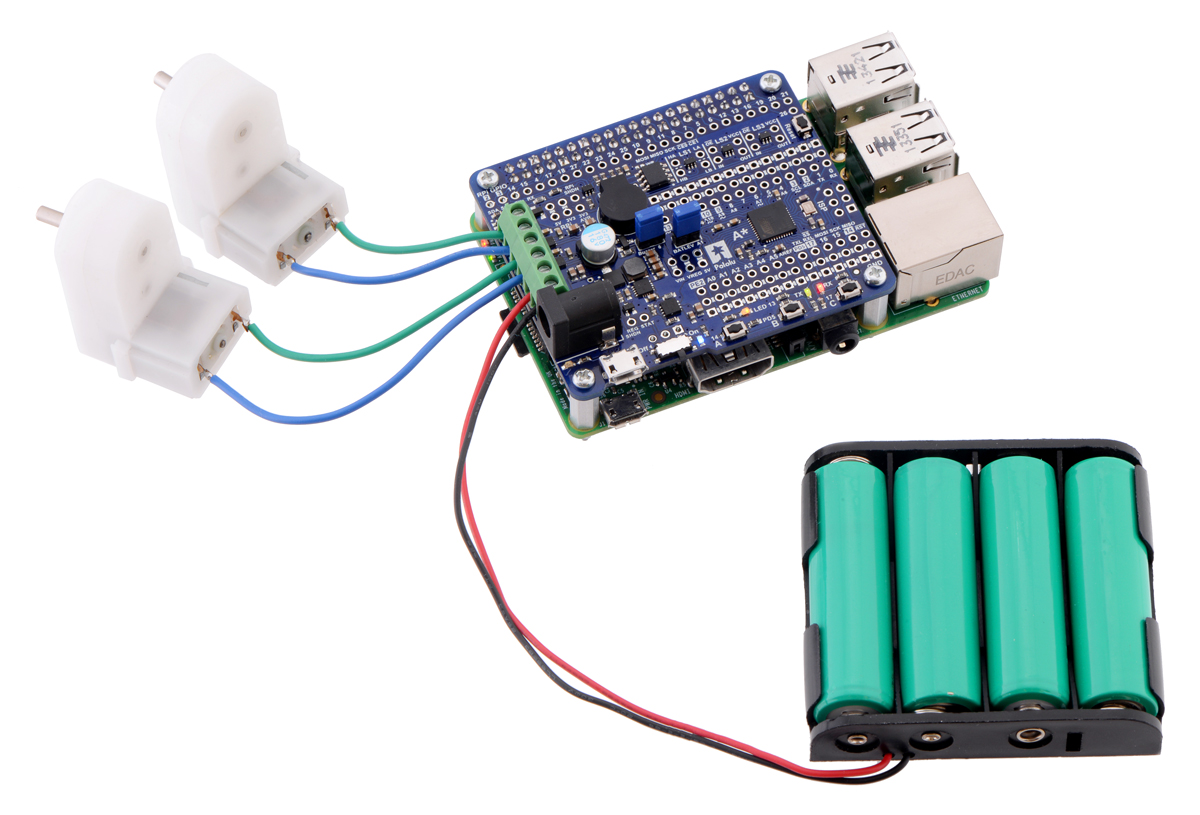
That’s why instead of using the standard Arduino form factor like the Prime, we built the A-Star 32U4 Robot Controller LV to double as a Raspberry Pi HAT:
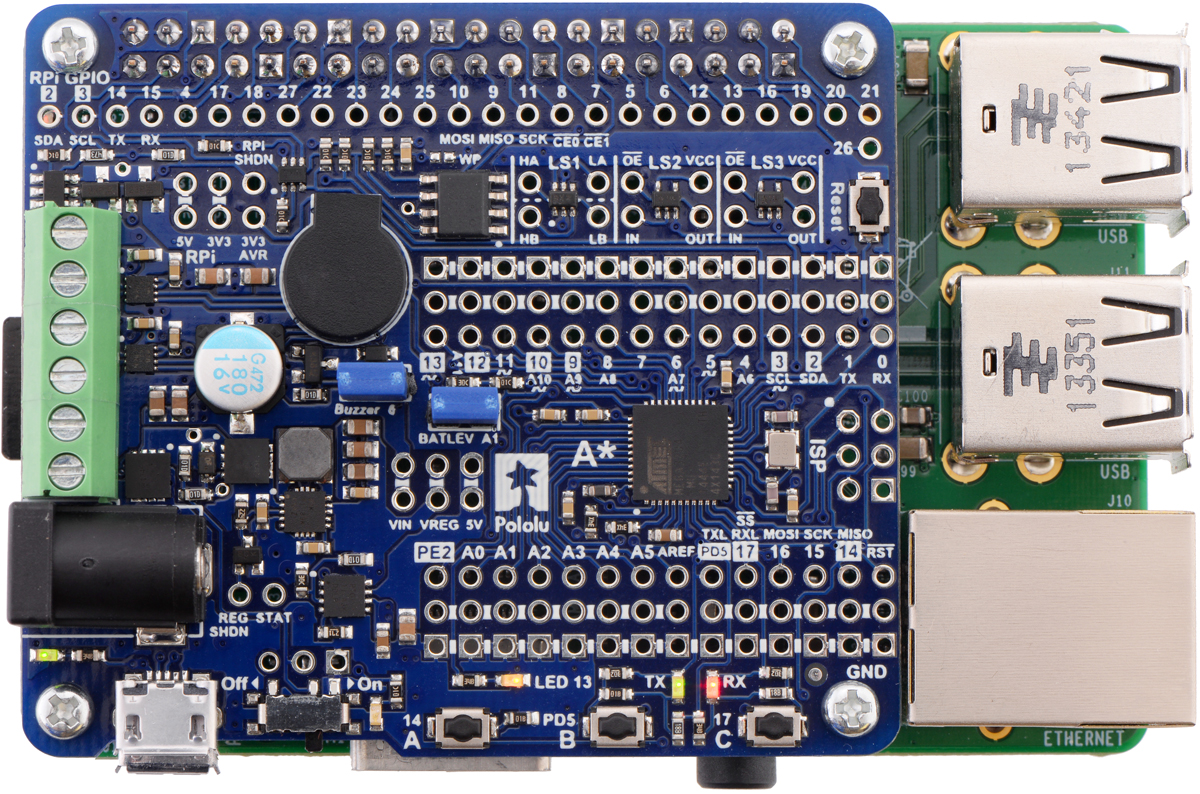 |
A-Star 32U4 Robot Controller LV with Raspberry Pi Bridge on a Raspberry Pi Model B+. |
|---|
The Robot Controller fits on top of a Raspberry Pi A+/B+/2, powers the Pi, and connects to it as an I²C slave device, giving you a bidirectional channel of communication between the two processors. We have broken out all of the GPIO of the Raspberry Pi, and there are a few general-purpose level-shifters included on the board to help you experiment with other communications protocols or interface other hardware to your system. We even include the EEPROM required by the HAT specification, though we have not found it to be particularly useful – we ship it blank and unlocked for you to experiment with.
For more information about the A-Star 32U4 Robot Controller LV, or to order, see the product page. You can also check out our open-source A-Star 32U4 Arduino library, which provides easy access to the main features of the Robot Controller, including its motor drivers; we will be adding examples showing I²C communication with the Raspberry Pi soon.
Related products





New products: 12V versions of the 25D mm metal gearmotors
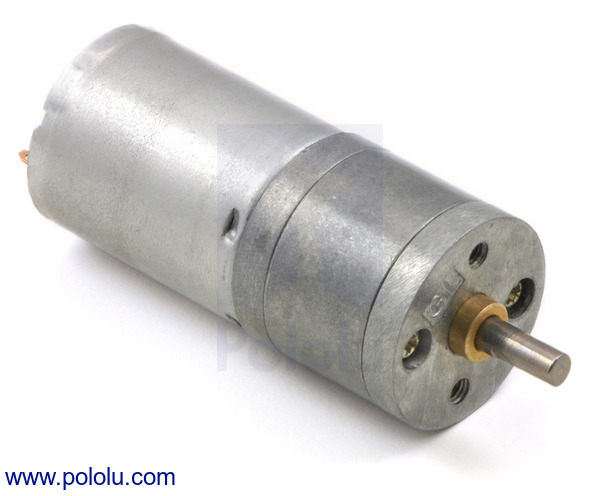 |
Our 25D mm metal gearmotors are now available with 12 V motors in three power levels: High-Power (HP 12V) (5.5 A stall), Medium-Power (MP 12V) (2.1 A stall), and Low-Power (LP 12V) (1.1 A stall). The new 12 V LP motor can deliver approximately the same power as its 6 V counterpart, but since the voltage is doubled, it only requires half the current to do so, which means you can control it with lower-current, higher-voltage motor drivers like the DRV8801 or MAX14870 motor driver carriers. At their respective nominal voltages, the 12V HP motor has nearly the same free-run speed as the 6V HP motor, but it produces approximately twice the torque, which in turn means approximately double the output power. The 12V MP motors fall nicely between the 12V LP and HP options, offering a significantly more power than the LPs without the large current draw of the HPs. All five motor variants are the same size, which makes it easy to swap one for another if your design requirements change.
As with our original 6 V options, we have paired these new motors with a variety of gearboxes spanning gear ratios from 4.4:1 through 378:1. The result is 26 new versions, bringing our total selection of 25D mm metal gearmotors to more than 50 options. Unfortunately, we do not have encoder options for the 12 V motors yet, but we should have those later this year.
| Rated Voltage |
Motor Type | Stall Current @ Rated Voltage |
No-Load Speed @ Rated Voltage |
Approximate Stall Torque @ Rated Voltage |
 With Encoder |
 Without Encoder |
|---|---|---|---|---|---|---|
| 6 V | high-power (HP) |
6.5 A | 9800 RPM | 2 oz-in | 1:1 HP 6V w/encoder | |
| 2200 RPM | 8 oz-in | 4.4:1 HP 6V w/encoder | 4.4:1 HP 6V | |||
| 1000 RPM | 17 oz-in | 9.7:1 HP 6V w/encoder | 9.7:1 HP 6V | |||
| 480 RPM | 36 oz-in | 20.4:1 HP 6V | ||||
| 285 RPM | 60 oz-in | 34:1 HP 6V w/encoder | 34:1 HP 6V | |||
| 210 RPM | 80 oz-in | 47:1 HP 6V w/encoder | 47:1 HP 6V | |||
| 130 RPM | 130 oz-in | 75:1 HP 6V w/encoder | 75:1 HP 6V | |||
| 100 RPM | 160 oz-in | 99:1 HP 6V w/encoder | 99:1 HP 6V | |||
| 57 RPM | 260 oz-in | 172:1 HP 6V | ||||
| 6 V | low-power (LP) |
2.4 A | 6100 RPM | 1 oz-in | 1:1 LP 6V w/encoder | |
| 1400 RPM | 5 oz-in | 4.4:1 LP 6V | ||||
| 630 RPM | 11 oz-in | 9.7:1 LP 6V w/encoder | 9.7:1 LP 6V | |||
| 300 RPM | 24 oz-in | 20.4:1 LP 6V | ||||
| 180 RPM | 40 oz-in | 34:1 LP 6V w/encoder | 34:1 LP 6V | |||
| 130 RPM | 50 oz-in | 47:1 LP 6V w/encoder | 47:1 LP 6V | |||
| 82 RPM | 85 oz-in | 75:1 LP 6V w/encoder | 75:1 LP 6V | |||
| 62 RPM | 110 oz-in | 99:1 LP 6V | ||||
| 36 RPM | 170 oz-in | 172:1 LP 6V w/encoder | 172:1 LP 6V | |||
| 27 RPM | 220 oz-in | 227:1 LP 6V | ||||
| 16 RPM | 250 oz-in | 378:1 LP 6V | ||||
| 12 RPM | 300 oz-in | 499:1 LP 6V | ||||
| 12 V | high-power (HP) |
5.5 A | 2200 RPM | 23 oz-in | 4.4:1 HP 12V | |
| 1000 RPM | 44 oz-in | 9.7:1 HP 12V | ||||
| 480 RPM | 85 oz-in | 20.4:1 HP 12V | ||||
| 285 RPM | 120 oz-in | 34:1 HP 12V | ||||
| 210 RPM | 165 oz-in | 47:1 HP 12V | ||||
| 130 RPM | 240 oz-in | 75:1 HP 12V | ||||
| 100 RPM | 300 oz-in | 99:1 HP 12V | ||||
| 12 V | medium-power (MP) |
2.1 A | 1750 RPM | 11 oz-in | 4.4:1 MP 12V | |
| 800 RPM | 22 oz-in | 9.7:1 MP 12V | ||||
| 375 RPM | 42 oz-in | 20.4:1 MP 12V | ||||
| 225 RPM | 63 oz-in | 34:1 MP 12V | ||||
| 165 RPM | 85 oz-in | 47:1 MP 12V | ||||
| 100 RPM | 125 oz-in | 75:1 MP 12V | ||||
| 77 RPM | 165 oz-in | 99:1 MP 12V | ||||
| 45 RPM | 250 oz-in | 172:1 MP 12V | ||||
| 34 RPM | 320 oz-in | 227:1 MP 12V | ||||
| 12 V | low-power (LP) |
1.1 A | 1250 RPM | 8 oz-in | 4.4:1 LP 12V | |
| 570 RPM | 15 oz-in | 9.7:1 LP 12V | ||||
| 270 RPM | 29 oz-in | 20.4:1 LP 12V | ||||
| 160 RPM | 43 oz-in | 34:1 LP 12V | ||||
| 115 RPM | 60 oz-in | 47:1 LP 12V | ||||
| 75 RPM | 85 oz-in | 75:1 LP 12V | ||||
| 55 RPM | 115 oz-in | 99:1 LP 12V | ||||
| 32 RPM | 180 oz-in | 172:1 LP 12V | ||||
| 24 RPM | 240 oz-in | 227:1 LP 12V | ||||
| 15 RPM | 320 oz-in | 378:1 LP 12V | ||||
Keep in mind that stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. For these gearboxes, the recommended upper limit for instantaneous torque is 200 oz-in (15 kg-cm), and we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes, especially for the versions that use high-power (HP) motors; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
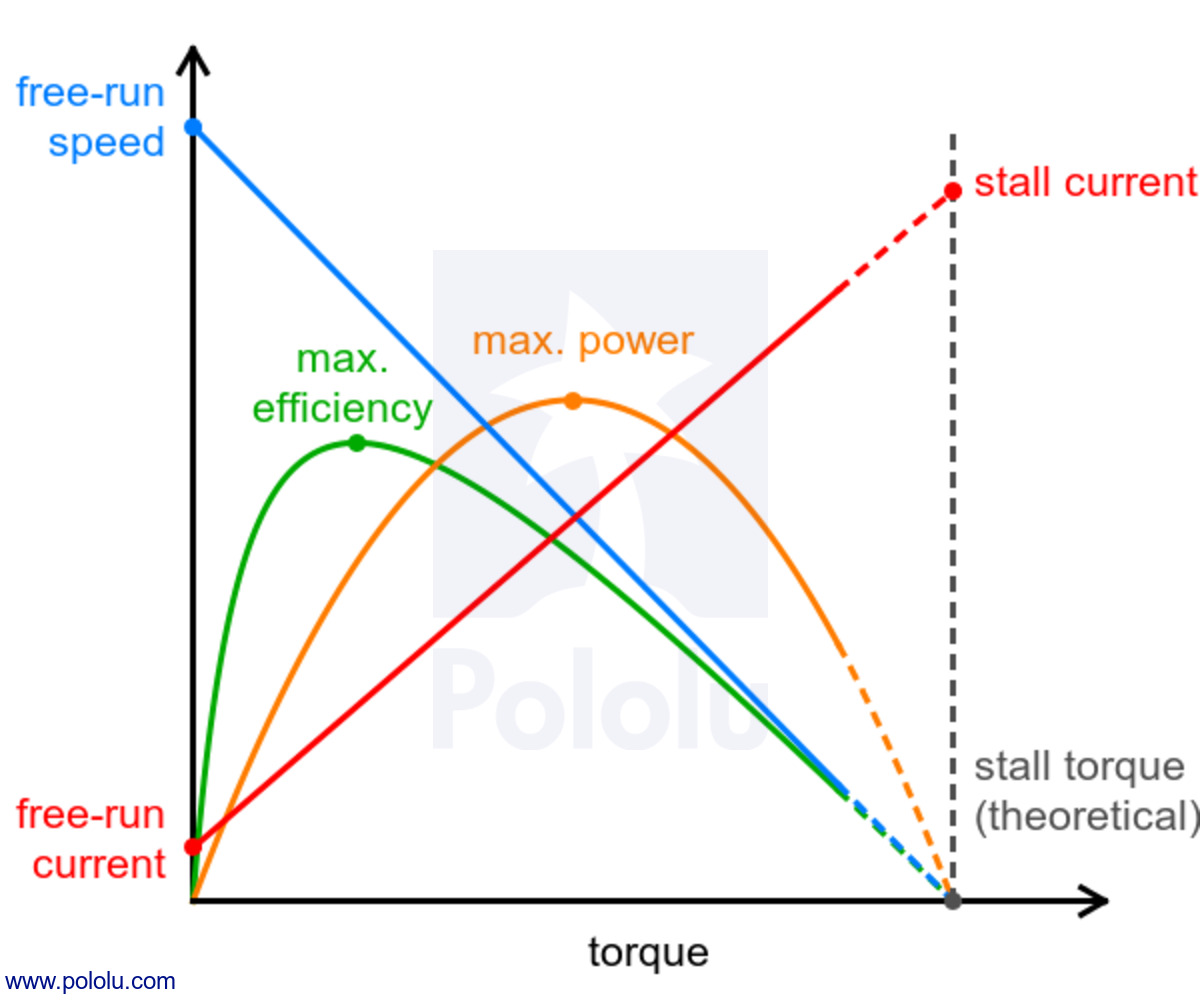 |
Brushed DC motor performance curves. |
|---|
We list stall torques and currents for our gearmotors because these are end points of approximately linear DC motor performance curves shown above, and with them you can determine how the motor will behave as the voltage or load changes. For more information about how to generate specific performance curves for our gearmotors from the specifications we provide, see the first frequently asked question on any of the motor product pages.
Single-color packs of 3″ jumper wires
|
|
||
|
|
||
|
|






We have had a lot of requests for single-color packs of our 3″ Premium Jumper Wires and Wires with Pre-crimped Terminals, which until now have only been available in 50-piece rainbow packs like this. I am happy to announce that we have now added monochromatic 3″ packs in six colors: black, red, yellow, green, blue, and white. Multiply that by three different gender combinations (i.e. female-female, male-female, and male-male) and two styles (i.e. with or without housings), and that’s 36 new products in all!
Related products






New 1000:1 Micro Metal Gearmotors
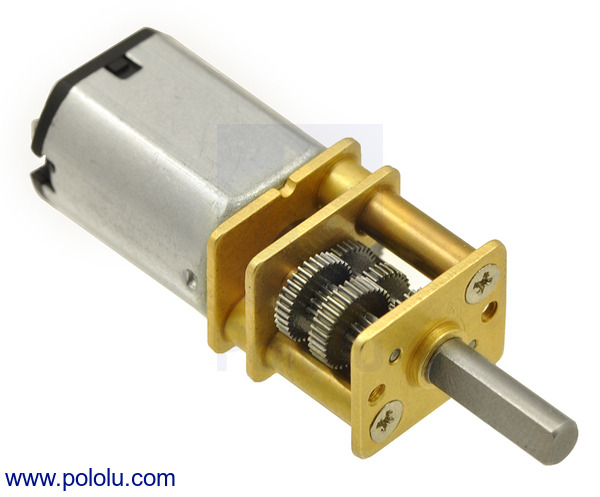 |
We have two new versions of our Micro Metal Gearmotors with 1000:1 gearboxes: low-power with an extended motor shaft, which is useful if you want a very slow gearmotor with an option for encoder feedback, and medium power (MP). The main applications in which these motors shine are ones where slow, smooth motion is required. The high gear ratio also allows these gearmotors to generate high torque without drawing as much current or stressing the motor as much as if you tried to get comparable torque from versions with lower gear ratios, but at typical voltages you might not actually achieve a higher torque before the gears fail. (The stall torques we list are theoretical because these 1000:1 gearboxes can generate enough torque to destroy themselves before they get close to stalling!)
These new additions bring our Micro Metal Gearmotor selection to 57 (I have an idea for a Heinz joke to put here, but it’s not coming out very well), all of which can be found in our Micro Metal Gearmotor category.
Related products


New products: Roboclaw 2x45A and ST 2x45A
Along with the V5 RoboClaw motor controllers we recently started carrying (2x5A, 2x15A, and 2x30A), we now have a pair of 2x45A versions from Ion Motion Control as well. The regular RoboClaw 2x45A (V5) has pin headers for its control I/O connections, like the other RoboClaws, while the Roboclaw ST 2x45A (V5) has screw terminal I/O connections for a potentially more convenient way to connect wires.
|
|
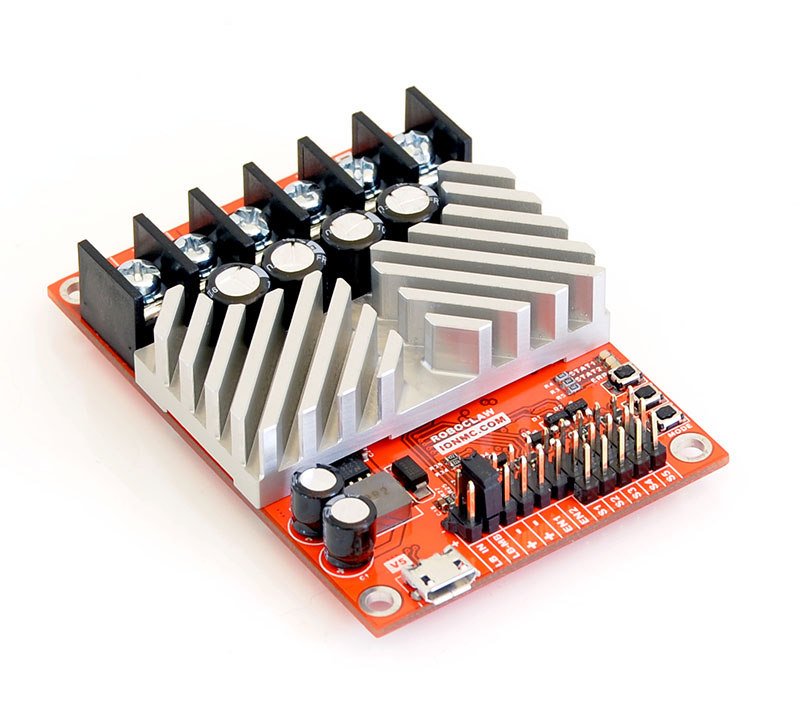
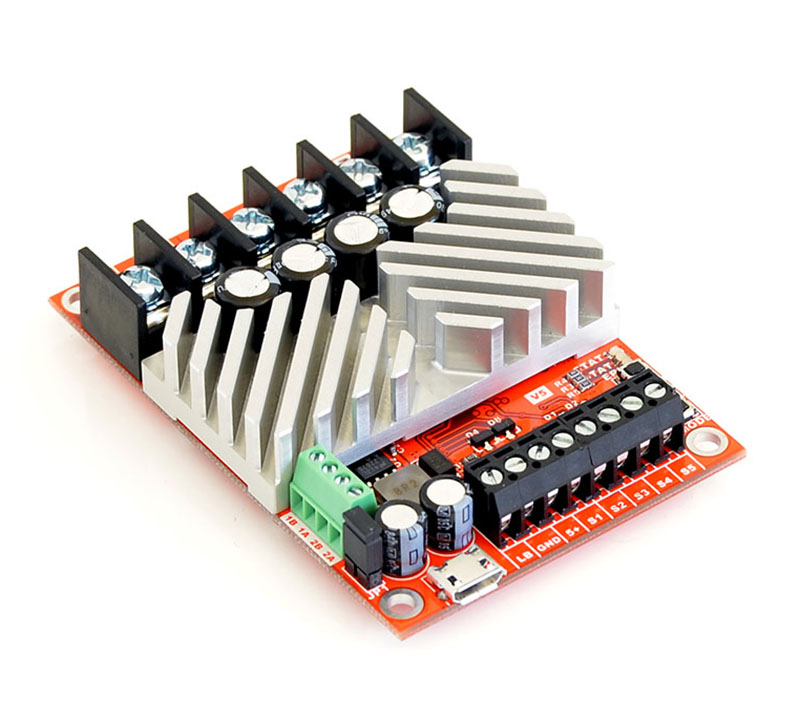
Both variants are capable of supplying a continuous 45 A (60 A peak) to a pair of motors at voltages from 6 V to 34 V, and they offer the same control options as the other members of the RoboClaw family: USB, TTL serial, RC signals, and analog voltages.
New product: Pololu Ball Caster with 1″ Plastic Ball
|
|


This new ball caster is an improved version of our original ball caster with 1″ plastic ball, with better rollers for reduced friction and a two-part ABS housing that securely encloses the plastic ball. The ball can rotate freely in any direction, making this caster suitable for use as a third contact point for wheeled, differential-drive robots weighing up to around ten pounds (the smaller ball caster on our 3pi robot is an example of this kind of application).
We designed the rollers to be replaceable by ball bearings for even better performance, and we expect to release a version that includes them by the end of summer. If you’re impatient, you can make this upgrade yourself by getting some standard 3×7×3mm ball bearings (3 mm inner diameter, 7 mm outer diameter, 3 mm width) along with 3 mm diameter dowel pins to hold them. The left picture below shows dowel pins we crudely cut ourselves in 8 mm segments from a longer rod.
|
|


You can also replace the included plastic ball with a metal one (not included) if a harder ball would better suit your application, but please note that a metal ball is much heavier and will not necessarily increase the load-bearing capacity of the ball caster.
Check out the product page for more information, or visit the ball caster category for more options, including ball sizes down to 3/8″.
Related products


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










