Pololu Blog » Posts tagged “new products” »
Posts tagged “new products” (Page 23)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: Aluminum mounting bracket for NEMA 14 stepper motors
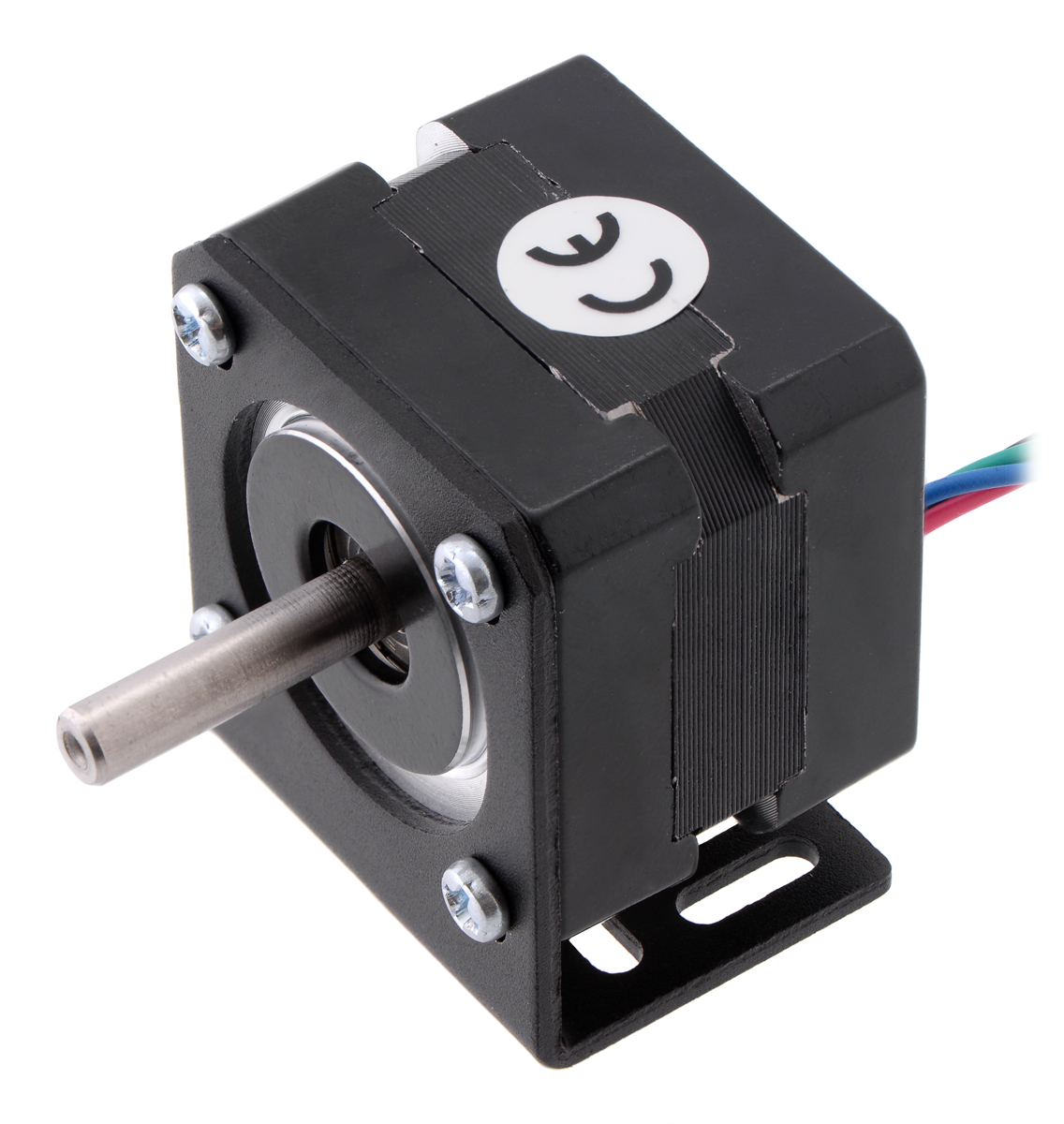 |
This new stepper motor bracket is designed to work with typical NEMA 14-size stepper motors, including all of the NEMA 14 stepper motors we carry. It is made from 2mm-thick black anodized aluminum, and like the larger NEMA 17 bracket we released earlier this year, it features slot cutouts to allow for a variety of mounting options.
|
|


For more information, see the product page.
Related products




New product: 56:1 Metal Gearmotor 20Dx42L mm
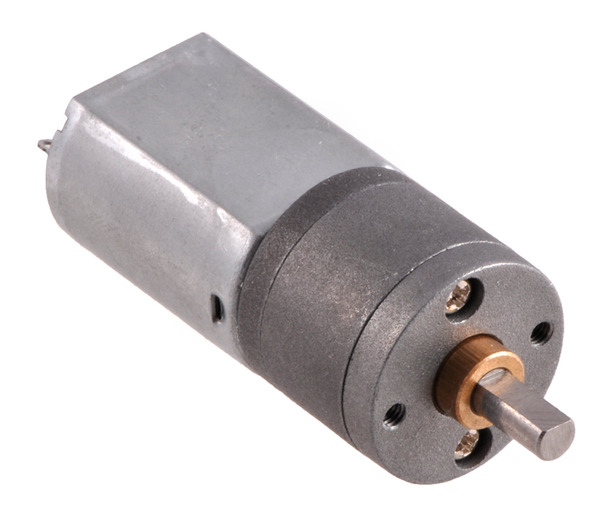 |
We have added a new gear ratio to our 20D mm line of metal gearmotors. This gearmotor has a 56:1 gearbox, resulting in a no-load speed of 250 RPM and a stall torque of 45 oz-in at 6 V.
Related products

New product: A-Star 32U4 Prime LV
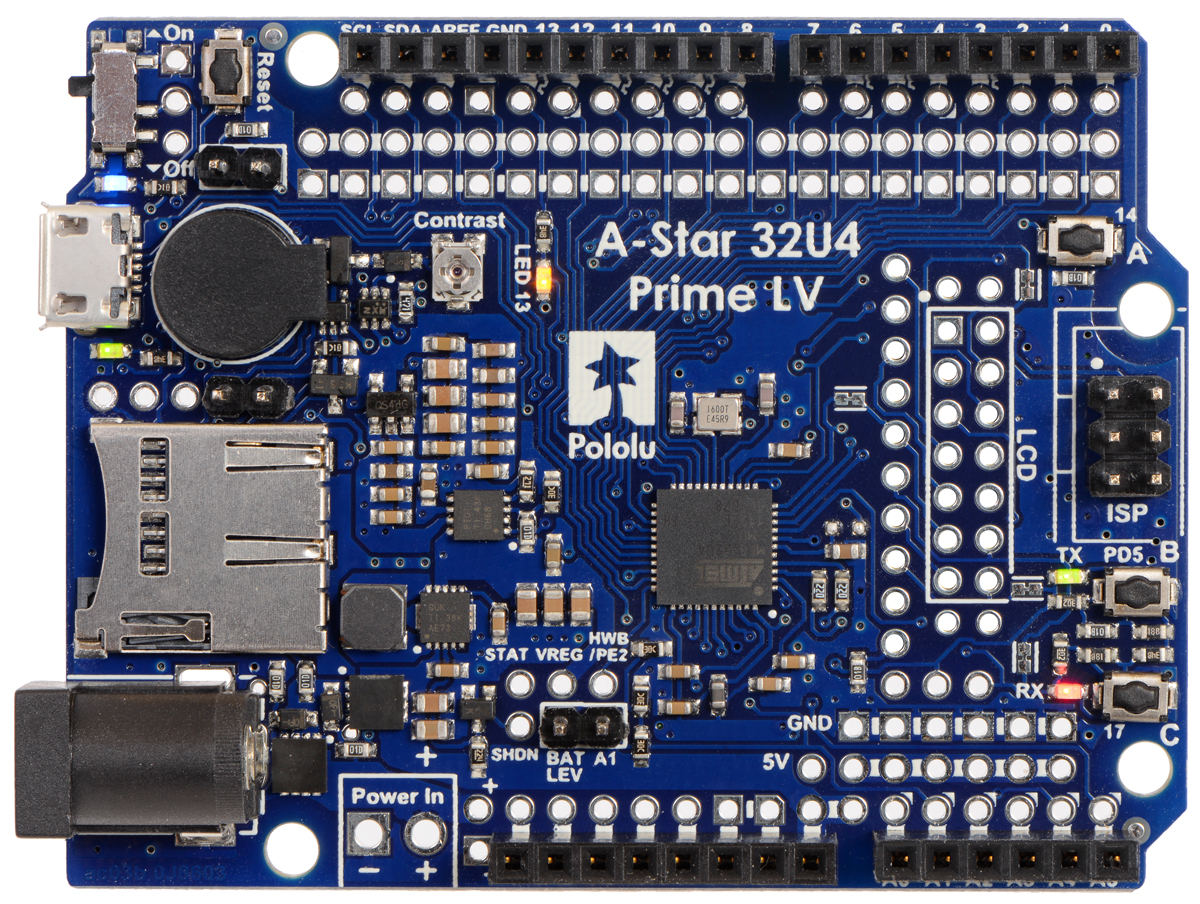 |
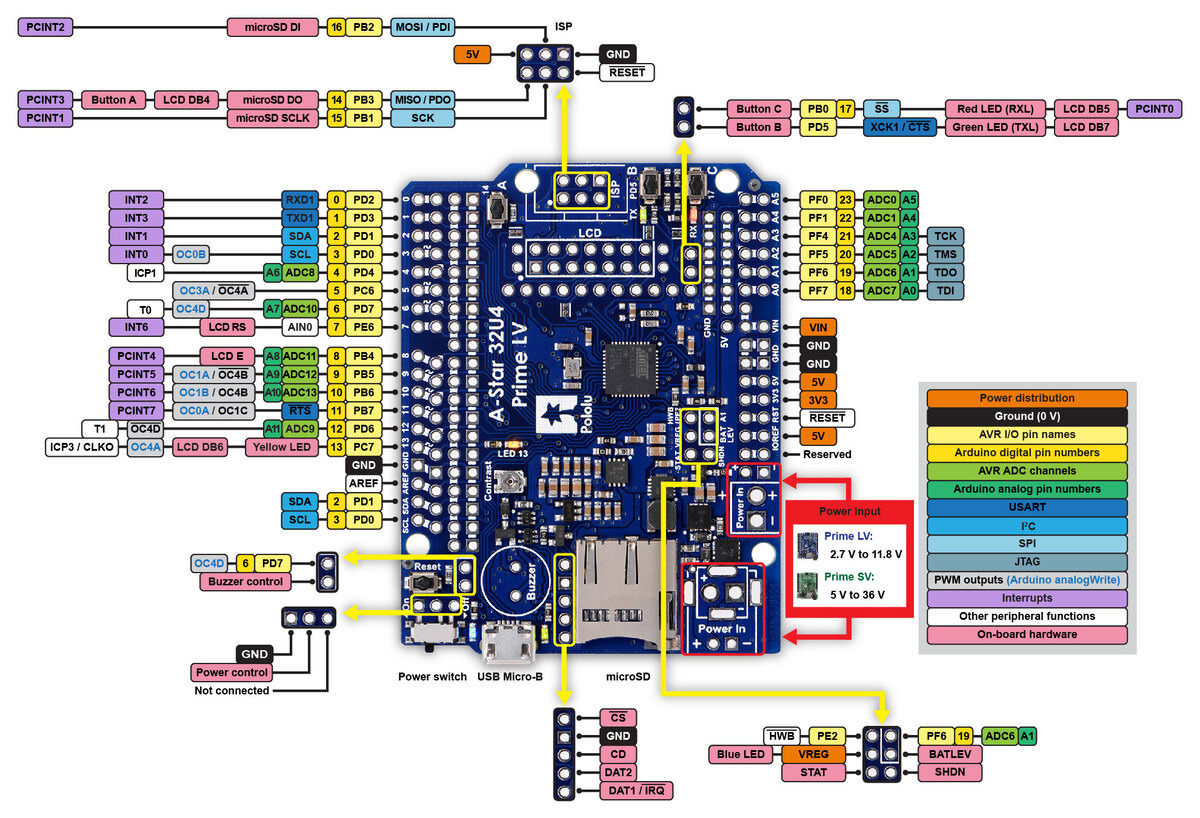
The A-Star 32U4 Prime LV is the newest member of our A-Star family of programmable microcontroller boards. This is the first Pololu board with the familiar Arduino shape: it shares the pinout of the Arduino Leonardo and should work with Leonardo-compatible shields. With some code changes, this A-Star can also serve as a substitute for the similar Arduino Uno in many projects. However, there is a lot more to it than Arduino compatibility!
 |
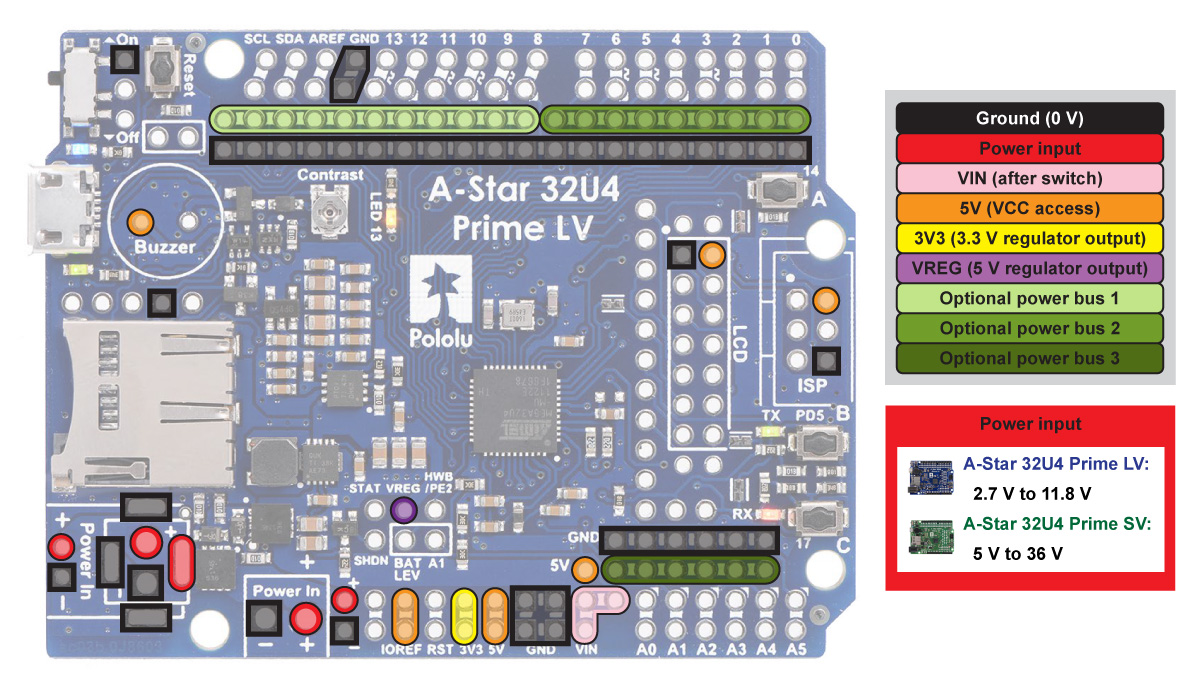
Unlike the Uno and Leonardo, the A-Star Prime has an efficient 5 V switching regulator and a seamless USB power switching circuit. This “LV” model uses the same power circuit, based on the Texas Instruments TPS63061 and TPS2113A, as the A-Star 32U4 Mini LV. Like that board, the A-Star 32U4 Prime LV can operate from 2.7 V to 11.8 V and supply about 1 A at 5 V, safely and efficiently switching between USB and external power without the limitations of components like fuses or diodes. It also includes a power switch, multiple power input connection points, and optional battery voltage monitoring, making it convenient to use in a variety of power supply scenarios. Here is a diagram of power distribution on the board:
 |
As you can see in the pictures, there are few extra rows of pins next to the normal Arduino headers. The point of these is to give you more connection options: we have included an extra access point (on a 0.1" grid) for most of the pins, as well as extra power and ground buses. The power buses are unconnected by default, so you could, for example, wire VIN directly to a bus and solder in servo connectors in one place (the LV regulator works great on a four- or five-cell NiMH pack), while having another bus run at 3.3 V to power an array of low-voltage sensors. As another example, these buses are a convenient place to add your own custom pull-up or pull-down resistors.
There is a lot of space available in this form factor compared to the typical Pololu breakout board, and we hate to waste space, so we packed it with extra, optional peripherals:
 |
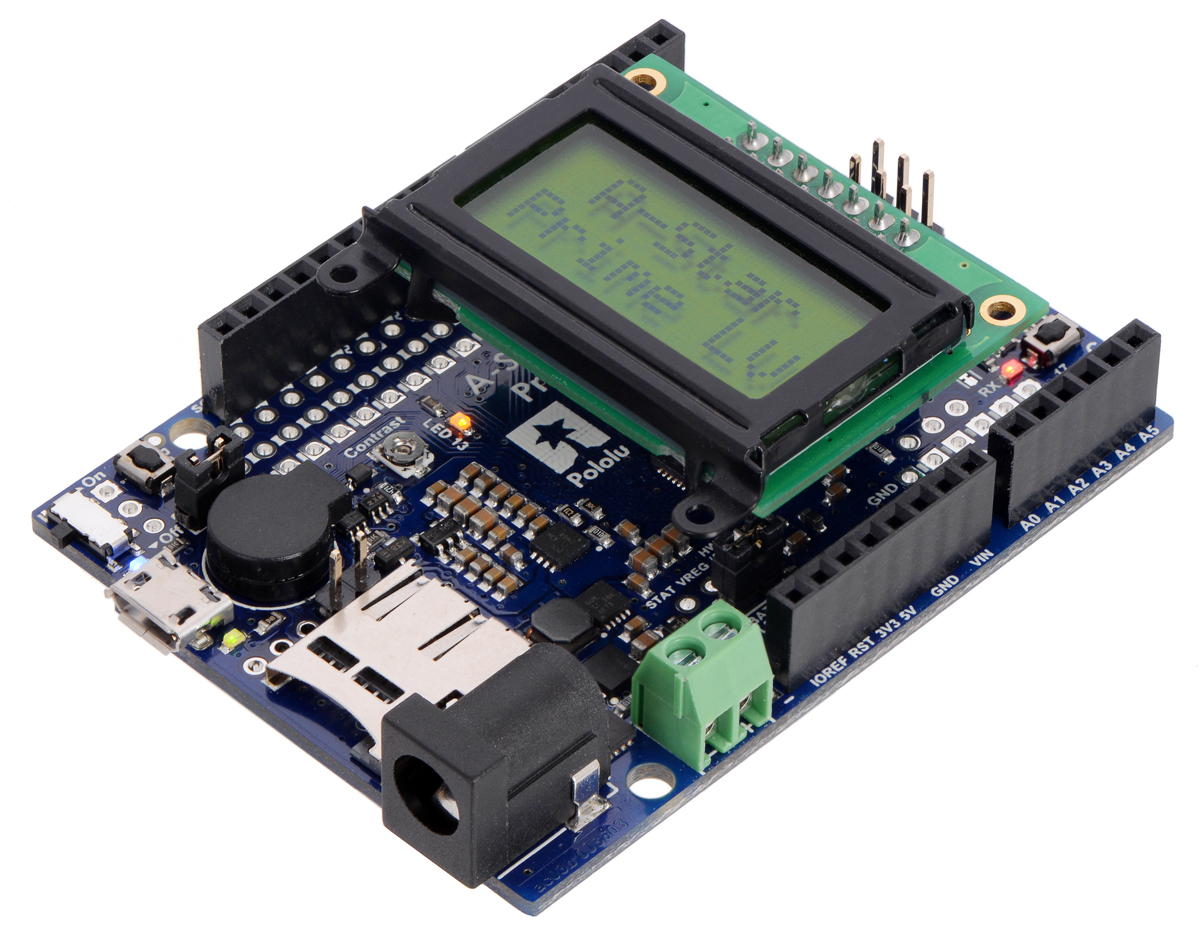
You might recognize some of the optional peripherals from our line of Orangutan Robot Controllers and the 3pi Robot. These are features that we have found really handy in our projects over the years: three user pushbuttons (sharing the MISO, RXLED, and TXLED lines), a buzzer for beeps and simple music (optionally controlled by digital pin 6), and a connector for an HD44780-based character LCD. You can enable just the features you want with jumpers; the ones you do not use will not interfere with shields or other electronics. On some models, we are also including a microSD card slot that works with the Arduino SD library, so you can easily turn your A-Star Prime into a datalogger or access large scripts and media files.
Here is what the A-Star 32U4 Prime LV looks like with all optional peripherals installed:
 |
This configuration is available pre-assembled as Pololu item #3109, while a configuration including pretty much everything but the LCD is available as Pololu item #3108. (You can still install an LCD yourself later.) For other configuration options, please see the individual product pages below or the A-Star 32U4 Prime LV category page.
Related products







New products: D24V25Fx 2.5 A step-down regulators available in new voltages
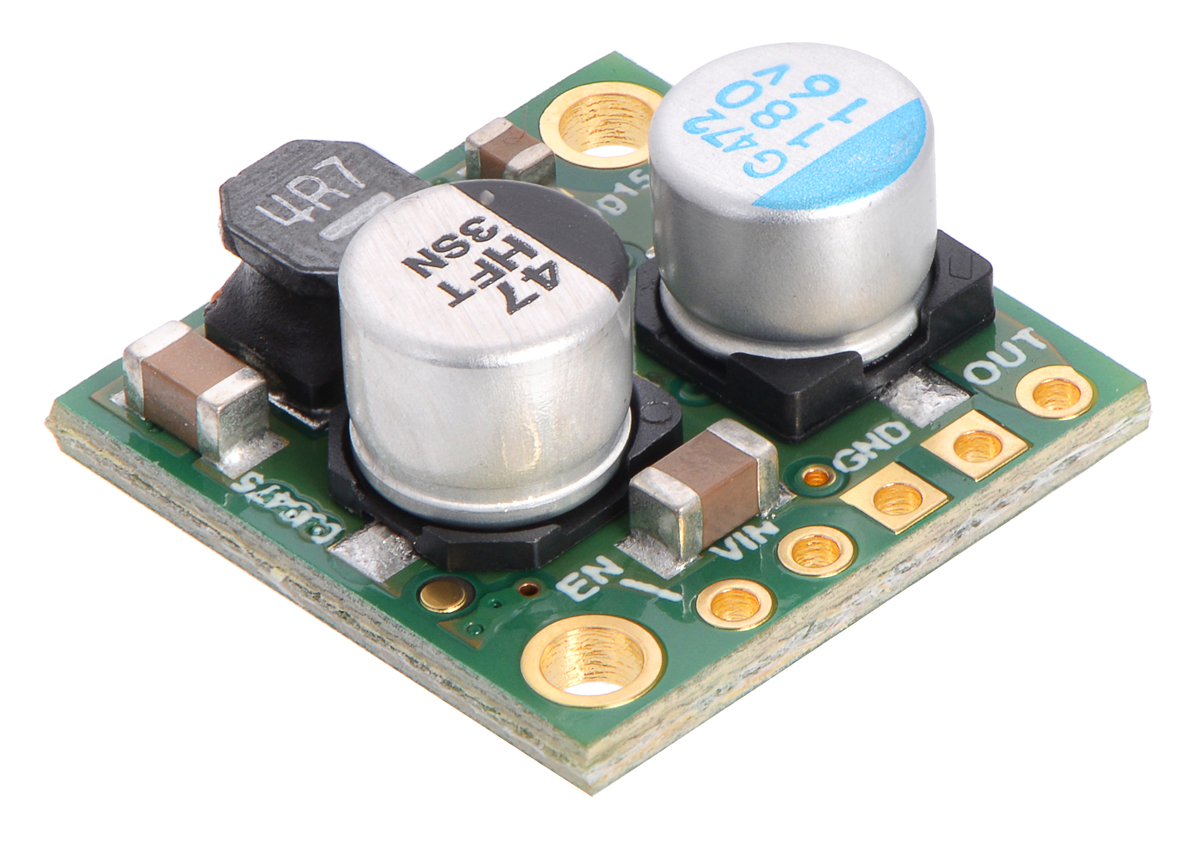 |
We just released 3.3 V, 6 V, 7.5 V, and 9 V versions of our D24V25Fx regulators, previously available only in a 5 V version. The D24V25x is a family of step-down regulators that take an input voltage as high as 38 V and have a typical maximum output current around 2.5 A. For more information, take a look at one of the items listed below or check out our step-down voltage regulators category page.
Related products




New product: Sharp GP2Y0A51SK0F Analog Distance Sensor 2-15cm
 |
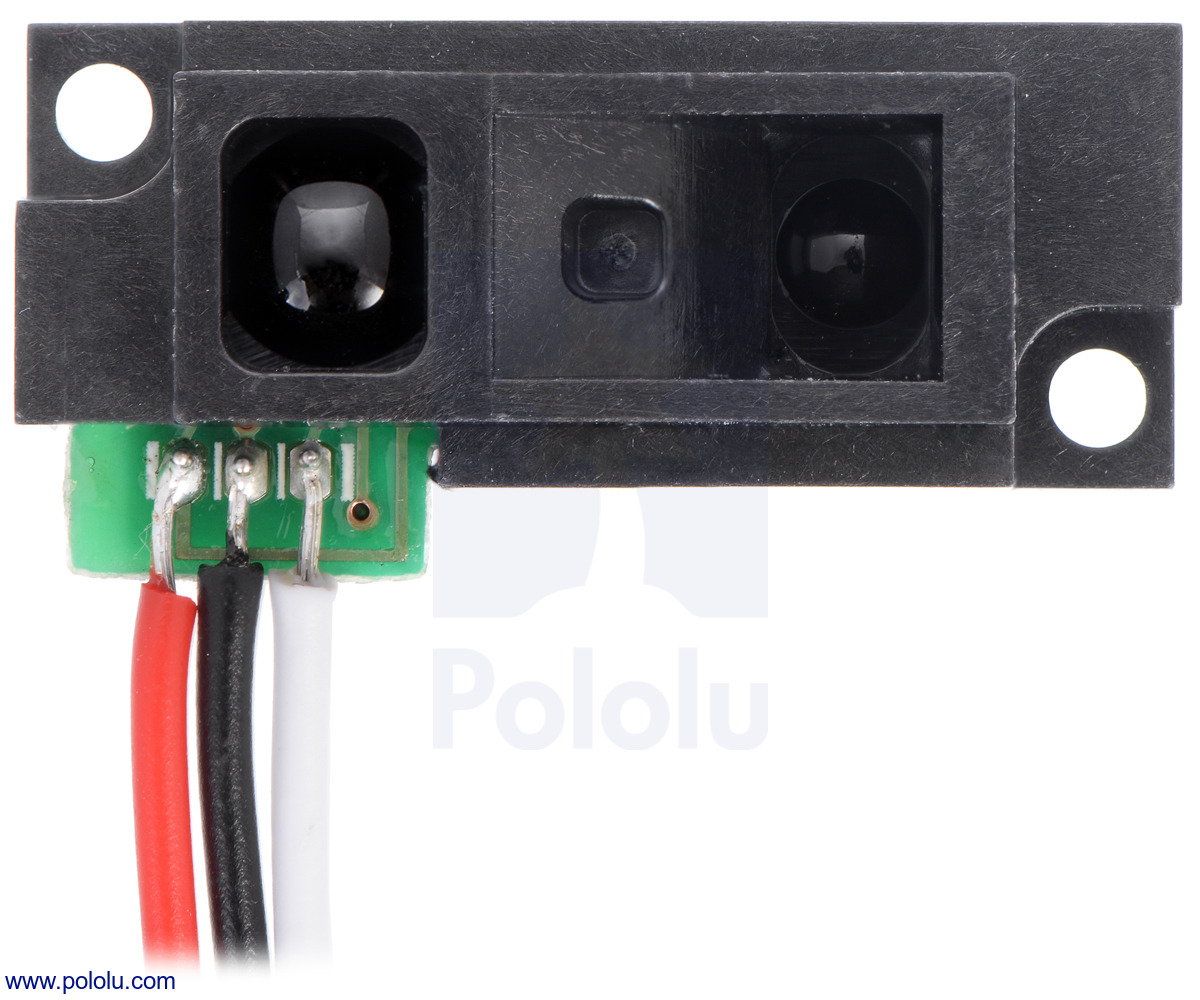 |
Sharp GP2Y0A51SK0F Analog Distance Sensor 2-15cm with wires soldered directly to the sensor PCB. |
|---|
We are now carrying the short-range Sharp GP2Y0A51SK0F Analog Distance Sensor. Like the GP2Y0D815Z0F we released a few months ago, this sensor has a maximum intended sensing range of 15 cm, but unlike that other sensor, this module tells you where the detected object is in its 2 cm to 15 cm range. Its close minimum sensing distance of 2 cm and high 60 Hz update rate make this a great choice for close-proximity range-finding, or the analog voltage output can be passed through a comparator to make an adjustable-threshold alternative to our digital Sharp distance sensors.
This sensor uses a 1.5 mm pitch JST ZH connector, which is different from the connectors on all the other Sharp sensors we carry. Unfortunately, this means it will not work with the JST PH cables we recommend for use with some of those other sensors. We are working on getting compatible cables, but in the interim, it is not too difficult (but not exactly easy) to solder wires directly to the output pins like in the picture on the right.
This sensor is also quite a bit smaller than most of the other analog Sharp sensors, so it will not work with our new brackets.
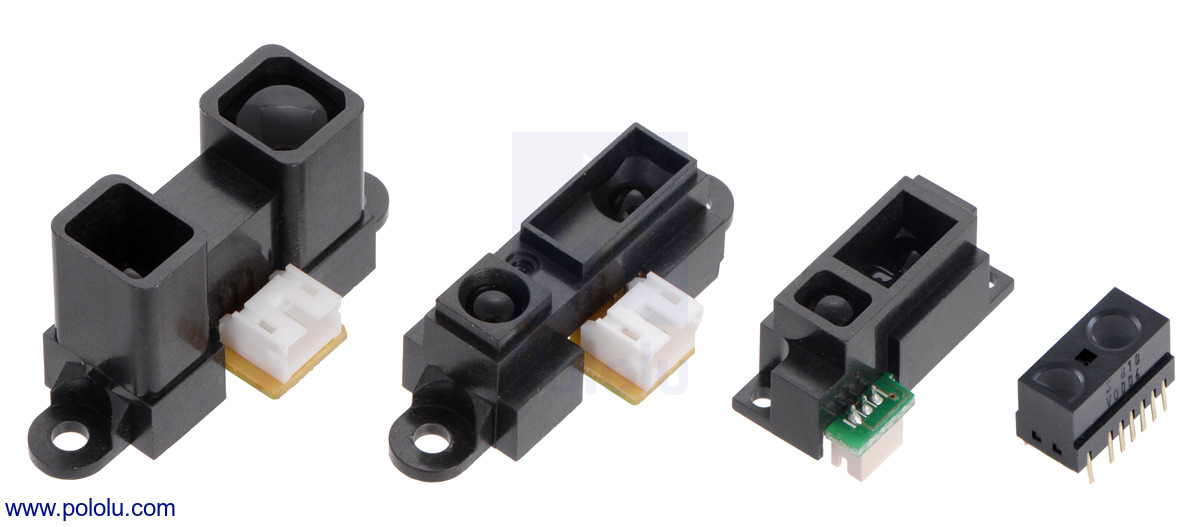 |
A variety of Sharp distance sensors. From left to right: GP2Y0A02, GP2Y0A21 or GP2Y0A41, GP2Y0A51, and GP2Y0D8xx. |
|---|
For more information, see the GP2Y0A51SK0F product page.
Related products


New products: D24V10Fx 1 A step-down voltage regulators
 |
We’ve just released a new family of D24V10Fx step-down voltage regulators. These buck regulators are very similar to the D24V5Fx regulator family we introduced in March, but they use the Intersil ISL85410 regulator IC – a higher-current relative of the ISL85415 on the D24V5x – that allows them to output twice as much current (up to 1 A). The D24V10Fx family is available in five different versions with fixed output voltages of 3.3V, 5V, 6V, 9V, and 12V.
Like their 500 mA counterparts, the D24V10Fx regulators operate with input voltages as high as 36 V at typical efficiencies of 80% to 95%. They feature the same power-save mode to improve efficiency at light loads, along with low dropout voltages and integrated protection against over-temperature and over-current conditions. All this makes them a good choice for powering applications where input voltage and operating current might vary over a wide range.
The slightly larger size of these new regulator boards (0.5″ × 0.7″ × 0.14″; 18 mm × 13 mm × 3.5 mm) makes room for a fifth pin that provides a “power good” indication (PG), but they are still not much bigger than standard through-hole linear regulators. The picture below shows a D24V10Fx, a D24V5Fx, and a 7805 voltage regulator in a TO-220 package:
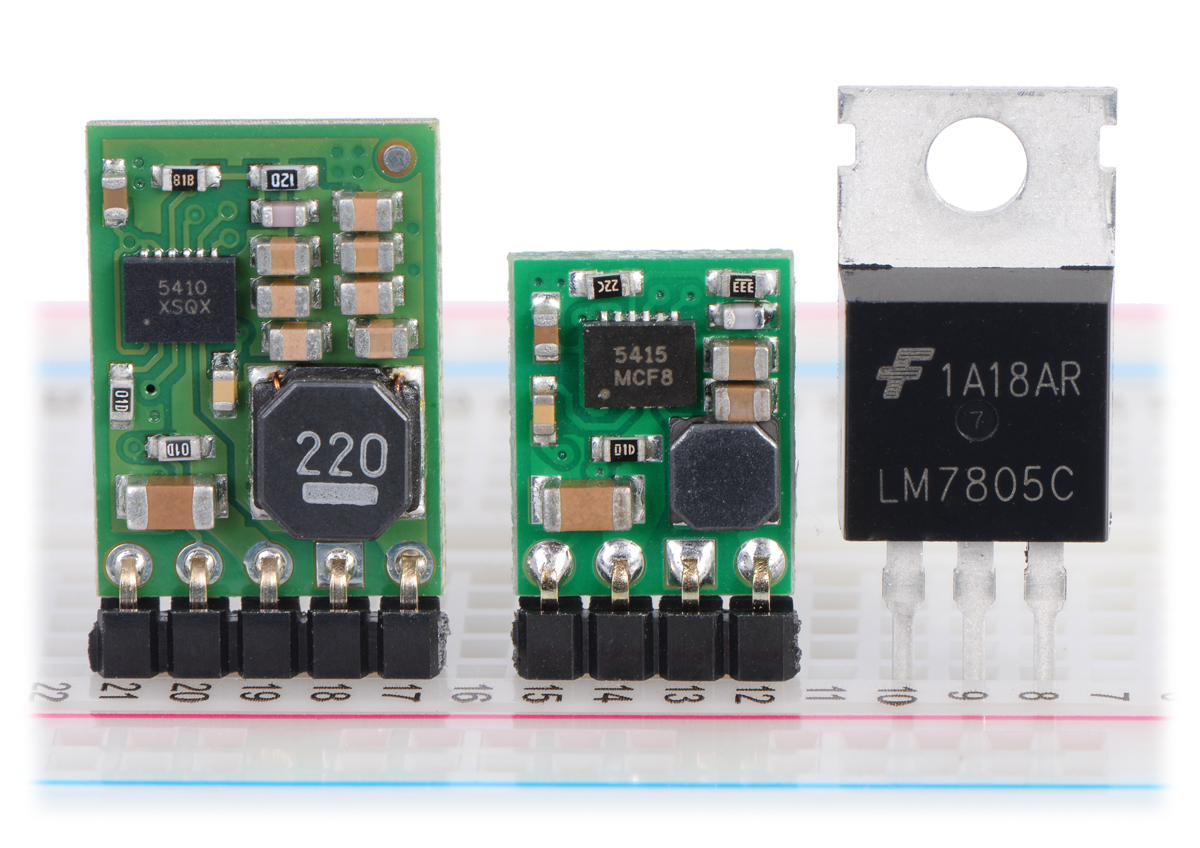 |
For other regulator options, you can take a look at our full selection of step-up voltage regulators, step-down voltage regulators, and step-up/step-down voltage regulators.
Related products

New products: Pololu T-shirts
We have a new batch of T-shirts available, just in time for winter! These shirts are very similar to the ones we released in 2012, featuring a printed circuit board (PCB) design in the shape of the Pololu logo on the front and the Pololu slogan “Engage Your Brain” on the back.
|
|


The shirts are available in a variety of youth and adult sizes, and this time we have two new colors available in addition to our standard royal blue: cardinal red and charcoal gray.
|
|


You can find our full selection in our T-shirts category.
Related products



New products: Stackable headers for the Raspberry Pi
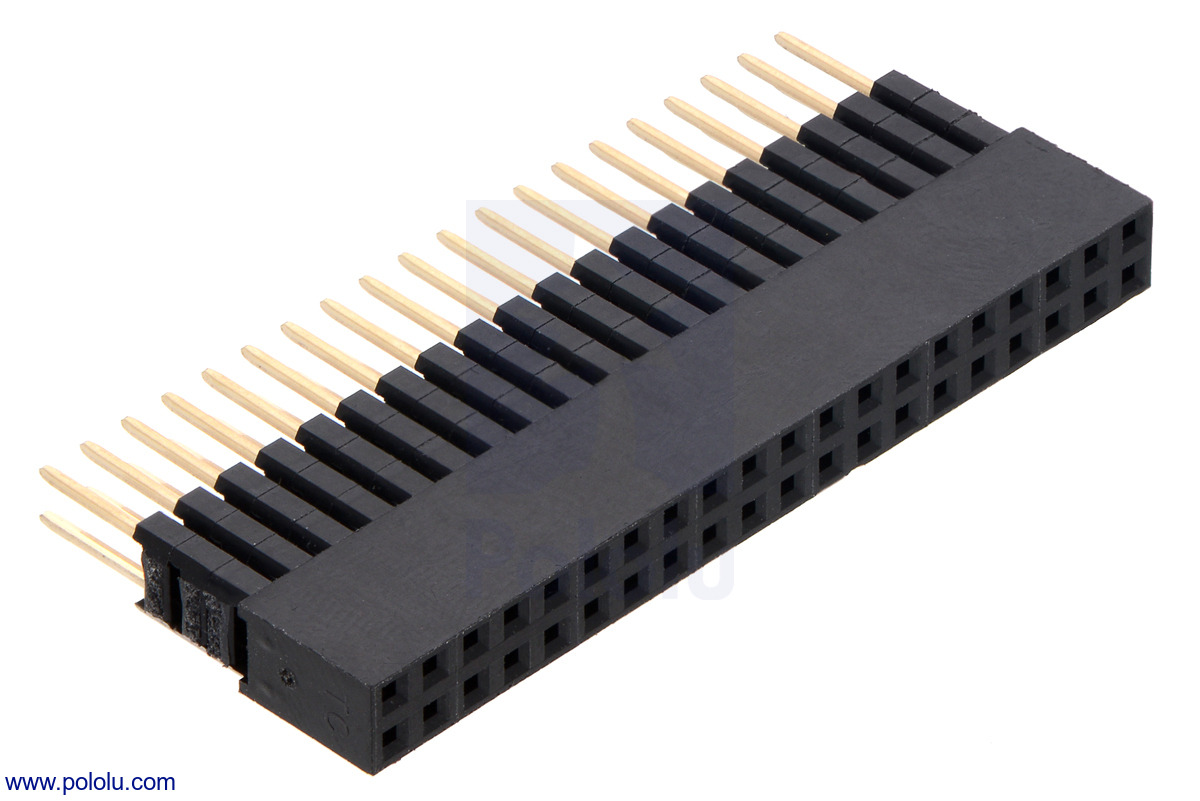 |
 |
Stackable 0.100″ Female Header: 2×20-pin, Straight. |
|---|
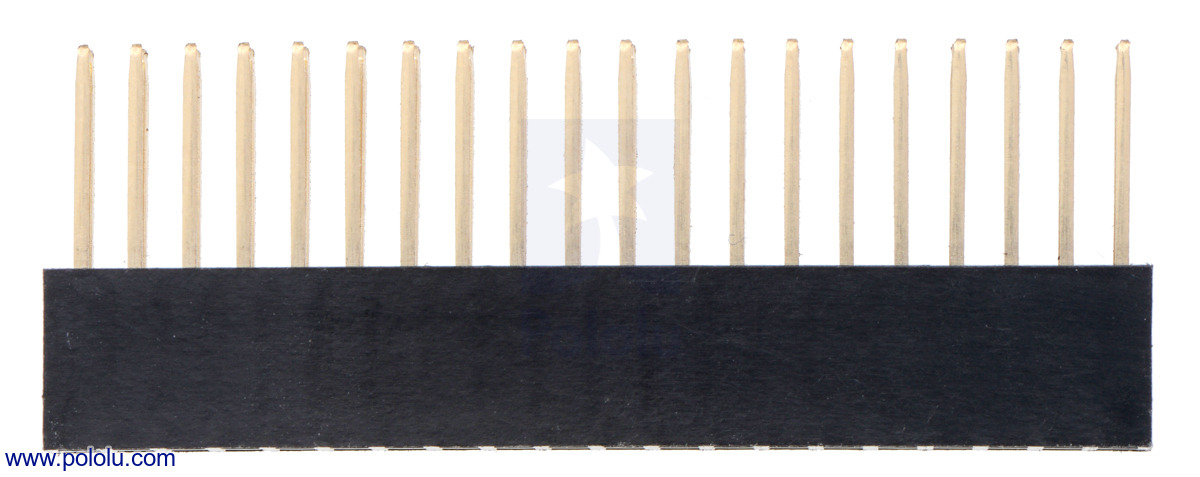
We now have special extended, stackable female headers for the Raspberry Pi:
- Stackable 0.100″ Female Header with Extra 0.3″ Spacer: 2×20-pin, Straight
- Stackable 0.100″ Female Header: 2×20-pin, Straight
- Stackable 0.100″ Female Header with Extra 0.2″ Spacer: 2×13-pin, Straight
- Stackable 0.100″ Female Header: 2×13-pin, Straight
The 2×20 versions work with the Raspberry Pi Model B+ (and the just-released A+), while the 2×13 versions match the I/O header on the older Raspberry Pi Models A and B.
See our Raspberry Pi category for our full selection of Raspberry Pi accessories.
Related products





New product: Parallax BASIC Stamp Discovery Kit (USB)
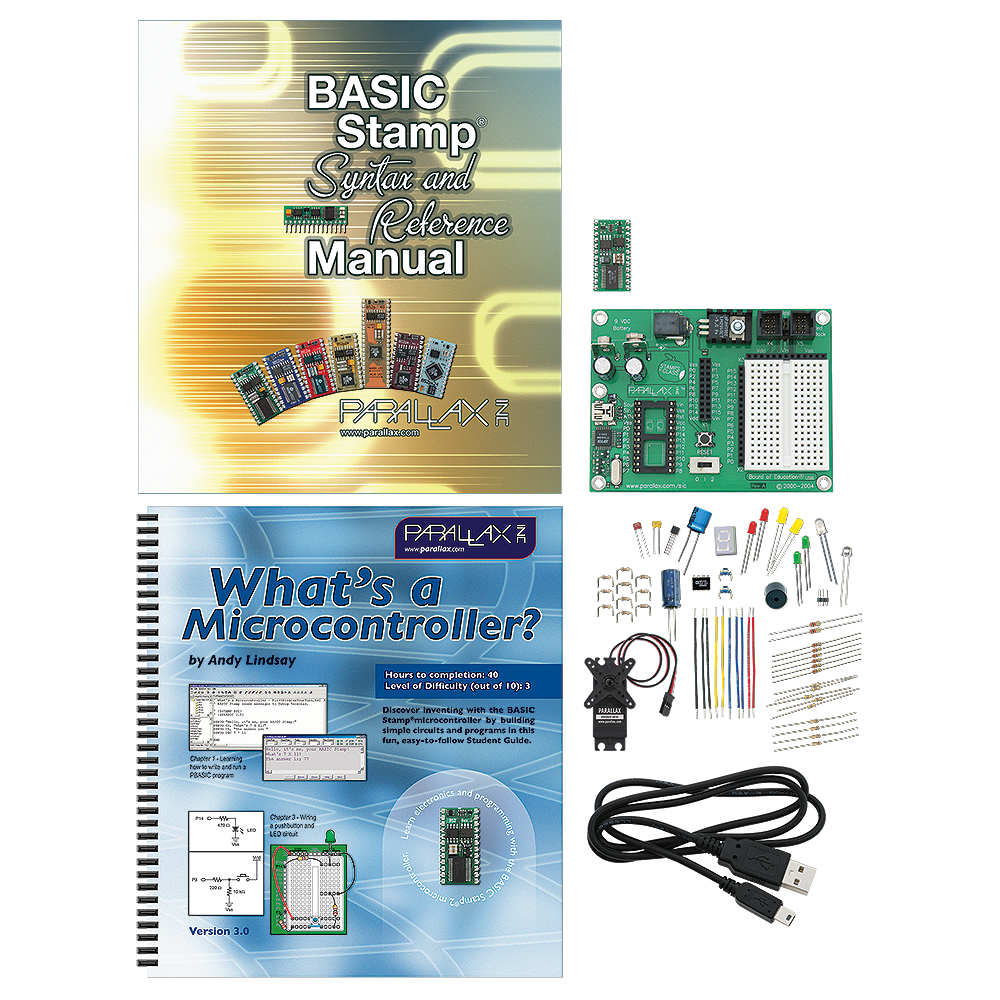 |
We are now carrying the USB version of the BASIC Stamp Discovery Kit. Please see the product page for more information.
Related products

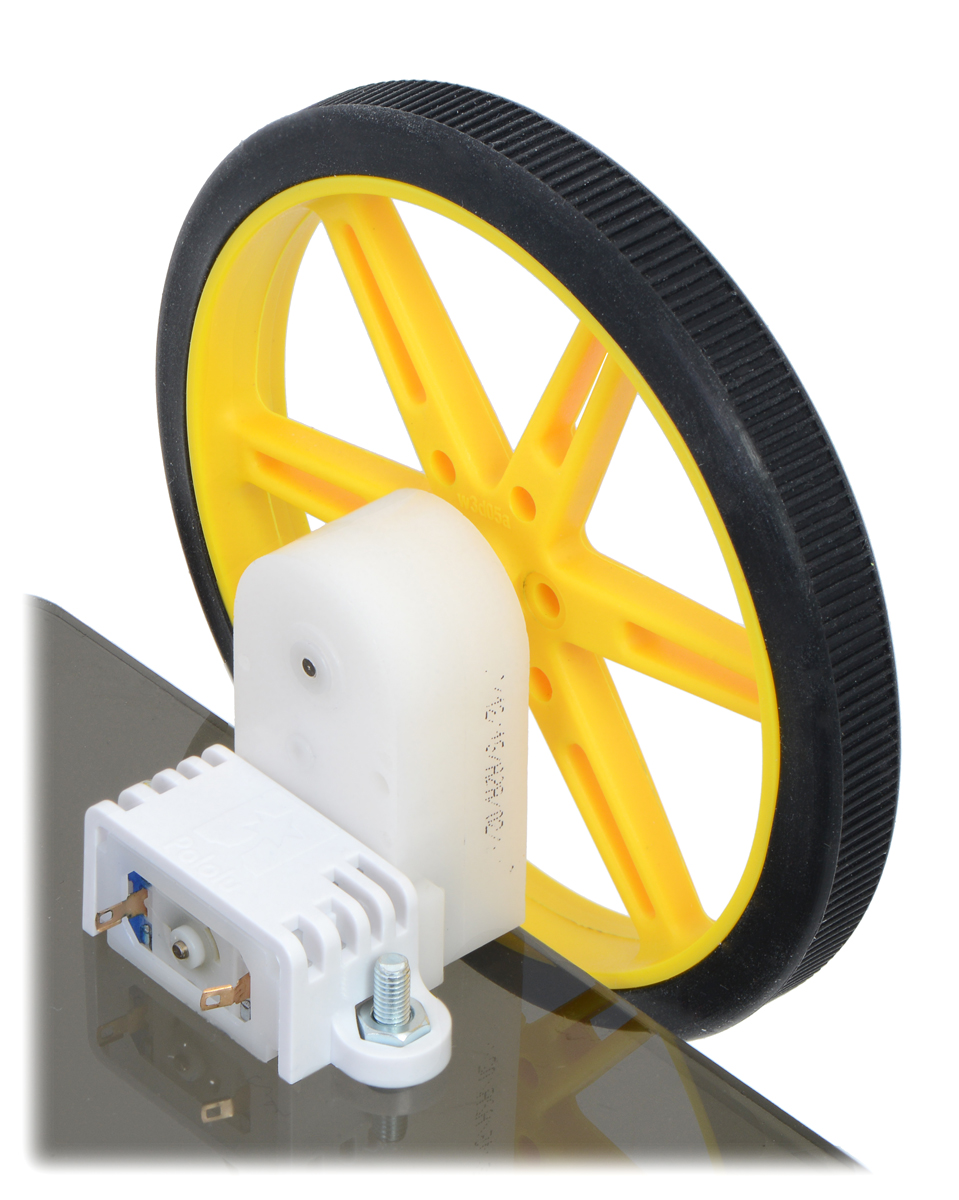
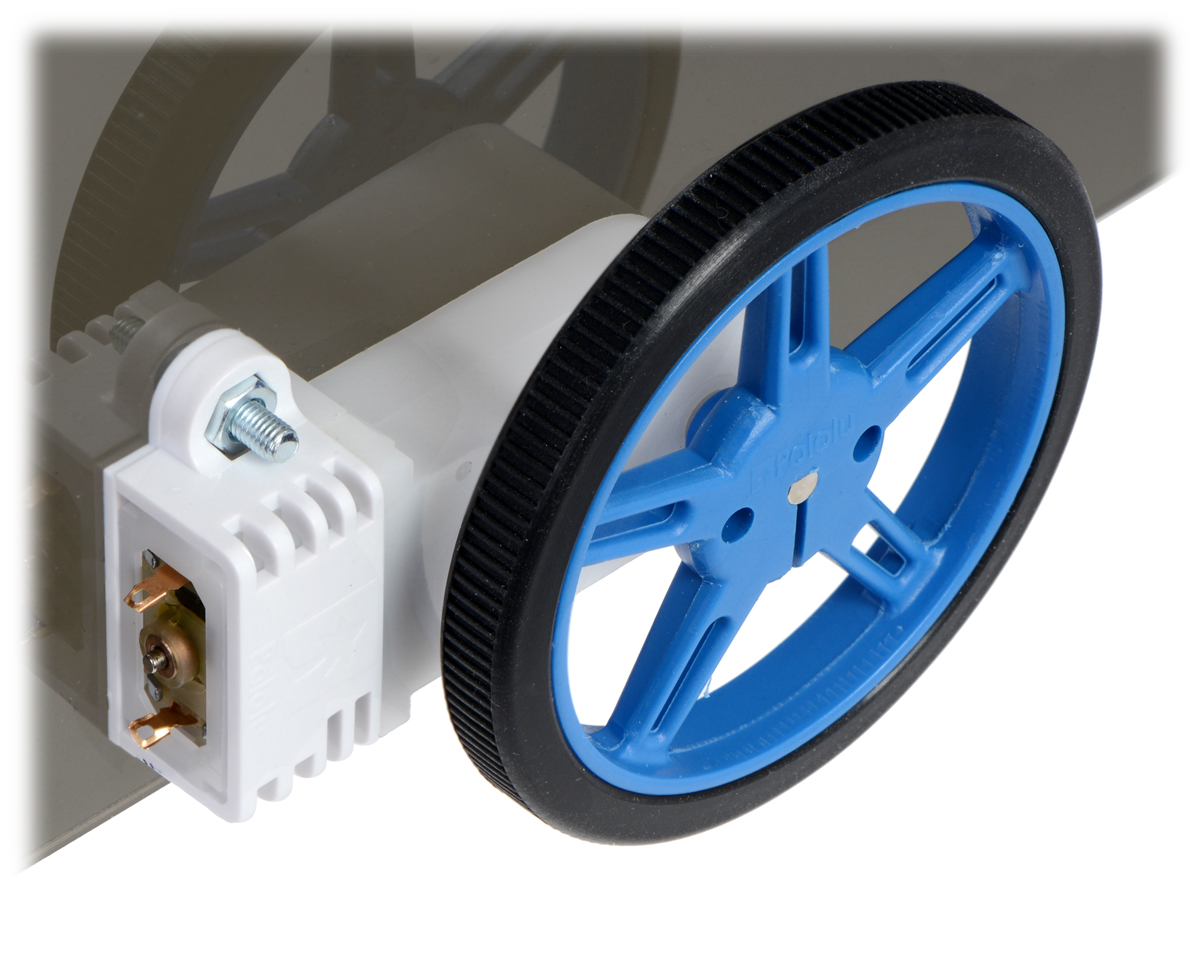
New products: Brackets for mini plastic gearmotors
Our mini plastic gearmotors make great low-cost actuators for small robots, but they have one major shortcoming: they are not easy to mount (the offset versions have just one mounting hole and the 90° versions don’t have any). Well, today I am pleased to announce that we now have two mounting solutions!
|
|
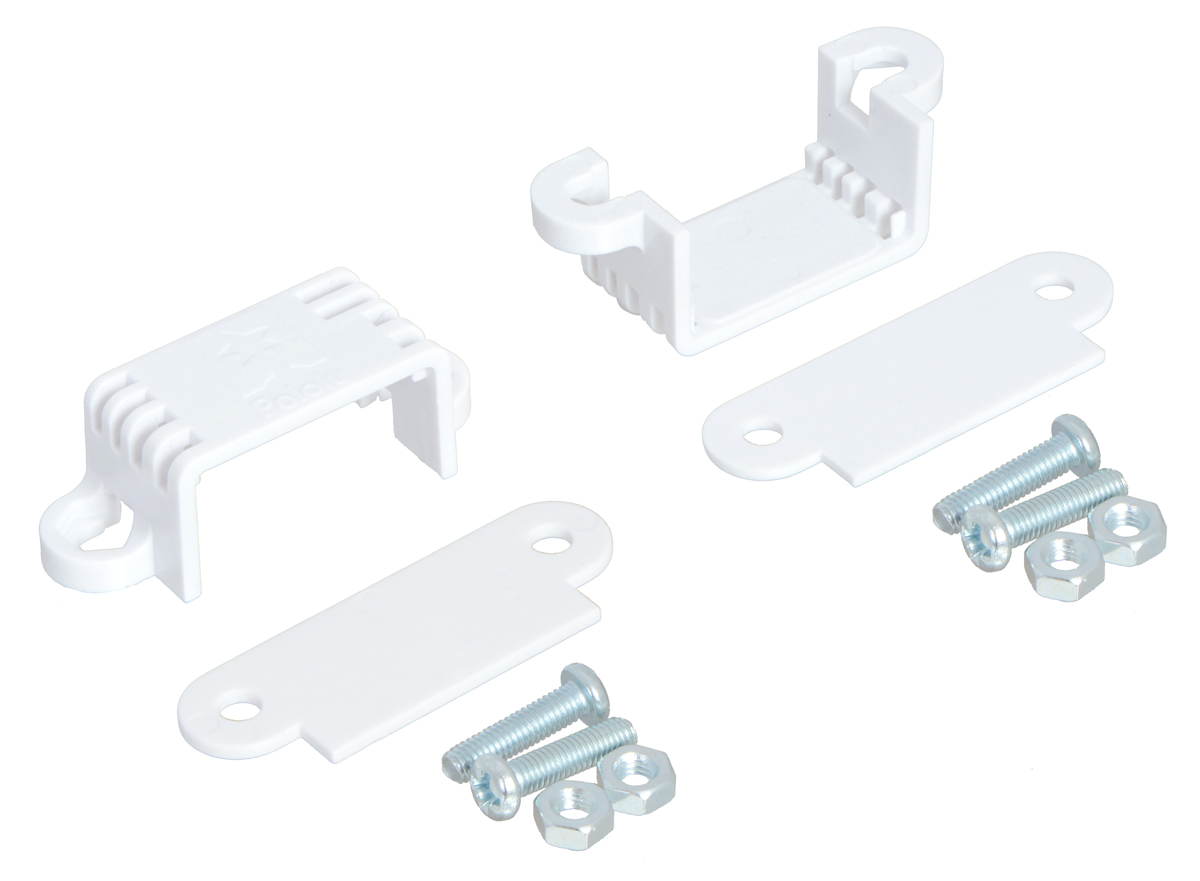
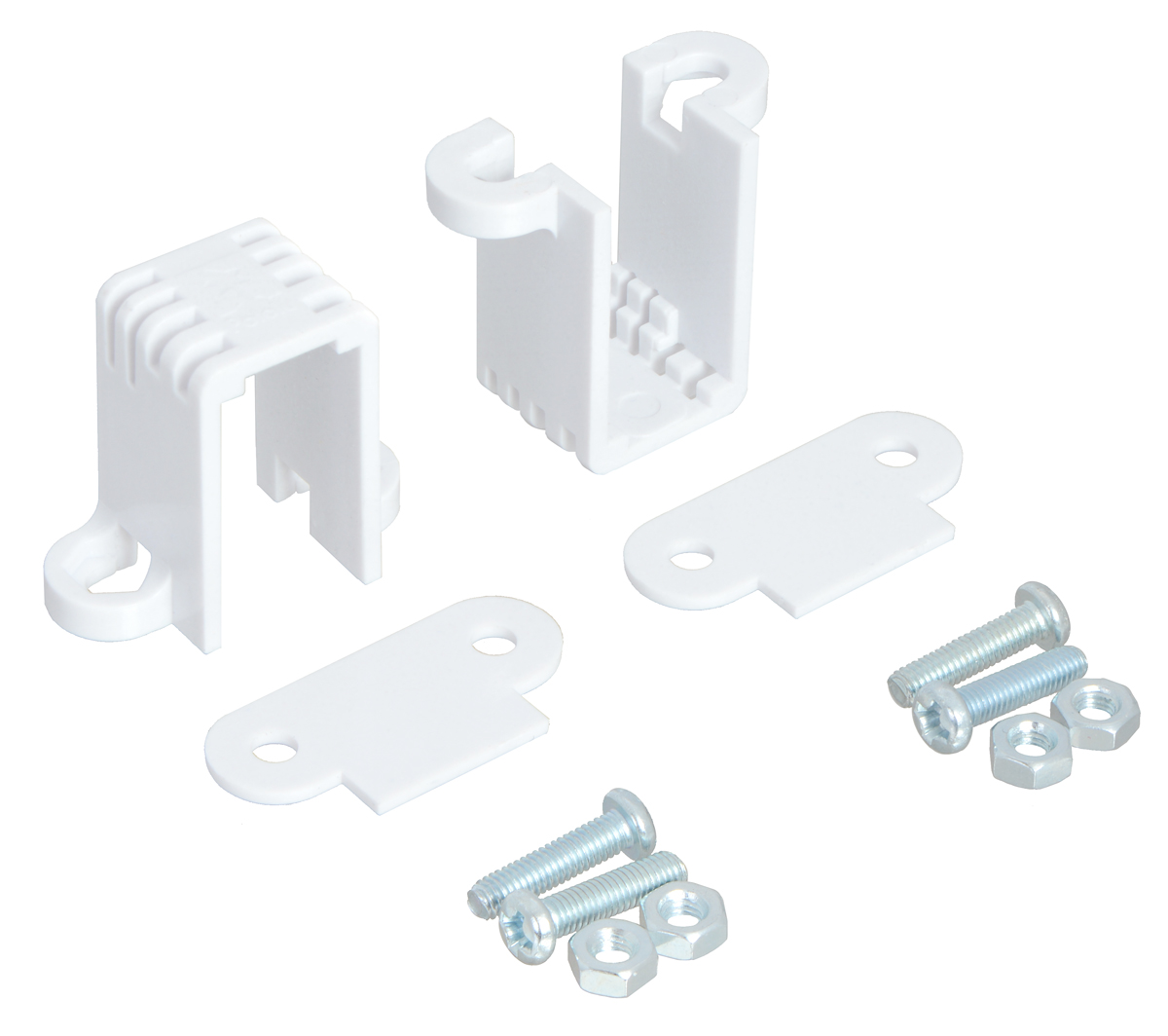
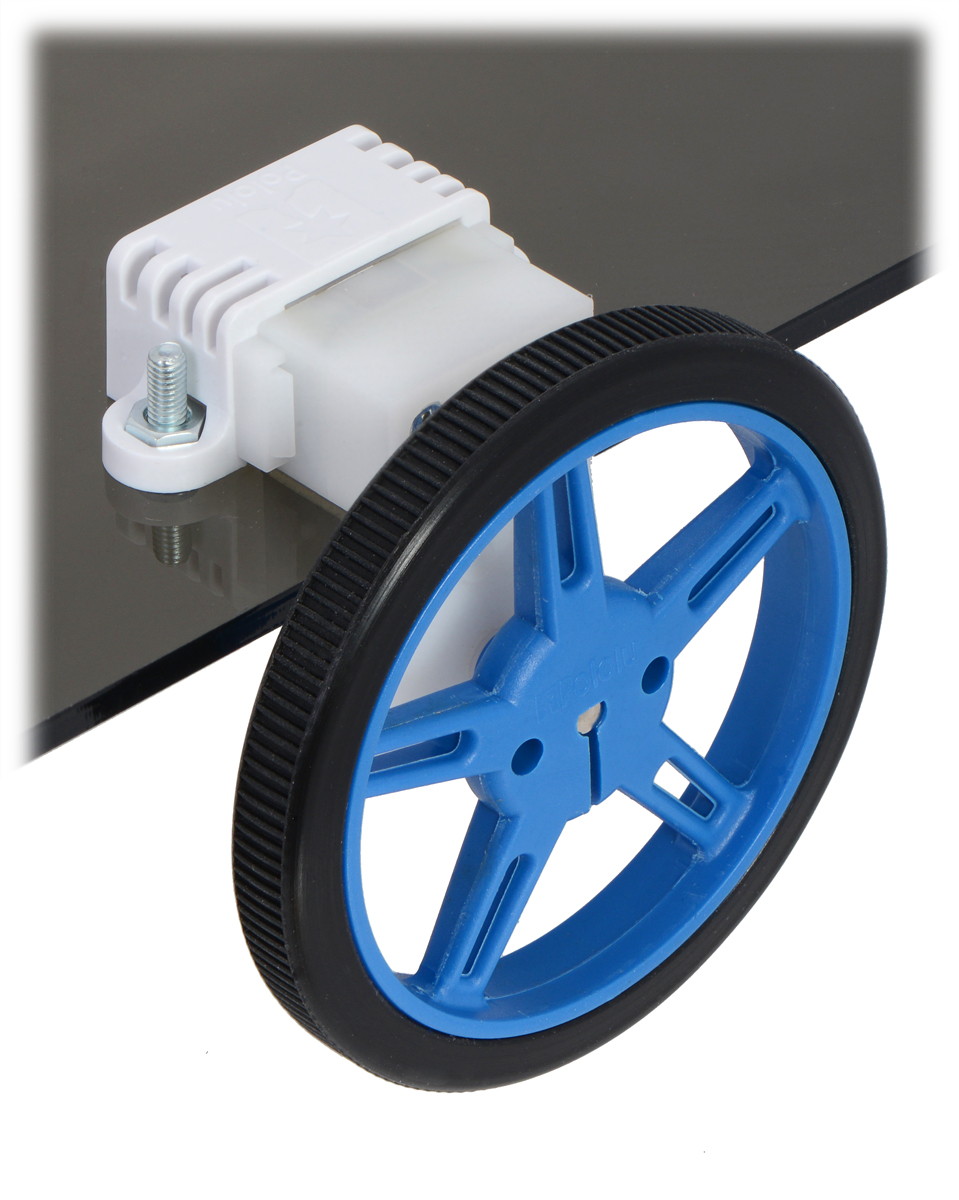
These new plastic brackets, available in a wide version and a tall version, are designed specifically for our mini plastic gearmotors, with internal ridges that fit into recessed features on the gearmotors to hold them securely in place. Both brackets are compatible with all of our mini plastic gearmotors, and the two versions allow for different mounting orientations, some of which can be seen in the pictures below:
|
|
|
|
|

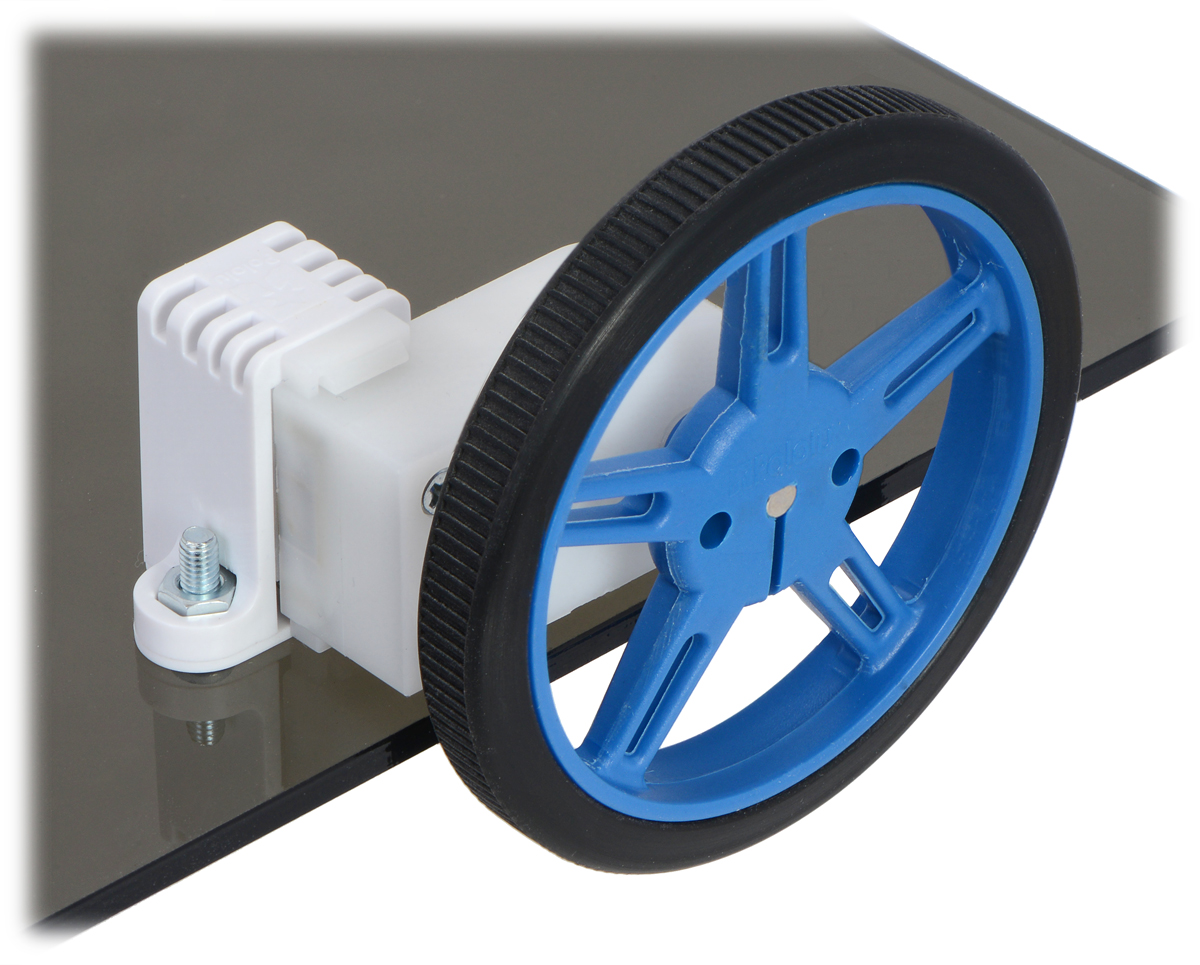
In some orientations, features of the mini plastic gearmotor cases prevent them from being flush with a flat mounting surface. To address this, we include a spacer plate with each bracket that fits between the gearmotor and the mounting surface in these orientations, keeping the motor level. If you look closely at the pictures above, you can see the spacer plate being used in three of them.
These new brackets are sold in pairs along with mounting hardware (two M3 screws and nuts per bracket).
See the product pages for additional information:
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









