Pololu Blog »
Pololu Blog (Page 25)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
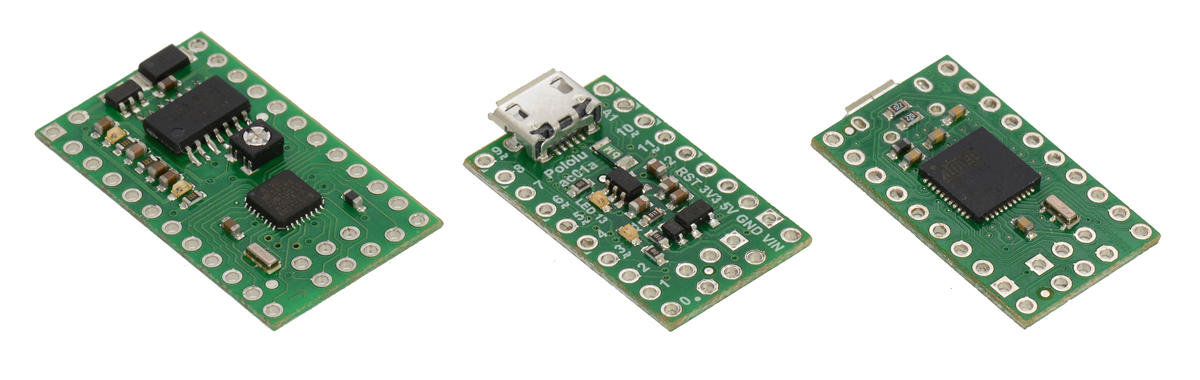
New product: A-Star 328PB Micro

Today we are releasing our newest A-Star programmable controller, the A-Star 328PB Micro. It is basically our version of the ubiquitous Arduino Pro Mini type products, but with the newer ATmega328PB microcontroller. The board itself is pretty straightforward (though the updated AVR is exciting), so the main thing I want to share in this post is our history with the Atmel ATmega328PB microcontrollers (this was before Microchip acquired Atmel) and how this product would not have existed without our lower-cost manufacturing initiative that I have been discussing.
We have been using the ATmega8, and then the ATmega48, ATmega168, and ATmega328P, since 2004 in many of our user-programmable products because of their versatility and excellent free compiler support (which also made Arduino possible). We first heard about the ATmega328PB in early 2014. The product kept being delayed, and I did not get a quote for them until October 2015. I ordered a reel right away; it arrived in March 2016. Over those two years, we put our AVR-related efforts into the ATmega32U4, releasing several A-Star 32U4 programmable controllers and using it on robots like the Zumo 32U4. The ATmega32U4 was a superior part with native USB and more I/O lines, making it a better fit for many of our applications. By the time we finally got the ATmega328PB parts, we had the A-Star 32U4 Micro available for just $12.75, making it less exciting to put effort into a lower-performance product that might end up costing almost the same amount.
 |
Original ATmega168-based Baby Orangutan robot controller from 2005 (left) next to A-Star 32U4 Micro boards. |
|---|
The new manufacturing equipment I ordered in the fall of 2017, along with the availability of our latest AVR programmer, brought attention back to the feasibility of a basic ATmega328PB carrier. I was hesitant to put effort into a product where we could not offer something substantially more compelling than what was already available. Despite the ATmega328PB being out in the wild for almost two years, it still had not really made it into many Arduino products, so I thought that perhaps we could offer something there. But more importantly, I wanted to see how low we could price it. I was aware of Arduino Pro Mini clones available on eBay and the AliExpress-type sites for under $3. Most official Arduino Pro Mini type products cost more like $10. For this project to be worthwhile, I wanted to get under $5.
It turns out we had to squeeze quite a bit just to get to the upper limit of that “under $5” goal, and so we are releasing this product at a unit retail price of $4.95. It’s not the under-$3 you can find for the absolute cheapest clones, but if you get the A-Star 328PB Micro from us, you are getting a well-supported, well-made product (each unit is 100% automatically visually inspected and 100% functionally tested) and supporting a company that is doing more than just copying products that are already out there.
It is my hope that by being able to offer the A-Star 328PB Micro for under $5, we are offering something meaningful, giving you a new option for general-purpose controllers at the price of a cheap lunch. I am interested to hear what you think. Is the 328PB interesting when you can get USB for not much more? Is the price low enough for you to buy from us instead of getting it from China?
We are offering the A-Star 328PB Micro in four voltage and frequency combinations:
- 5 V, 16 MHz (blue power LED)
- 5 V, 20 MHz (red power LED) Note: See item-specific page for speed warning.
- 3.3 V, 8 MHz (green power LED)
- 3.3 V, 12 MHz (yellow power LED)
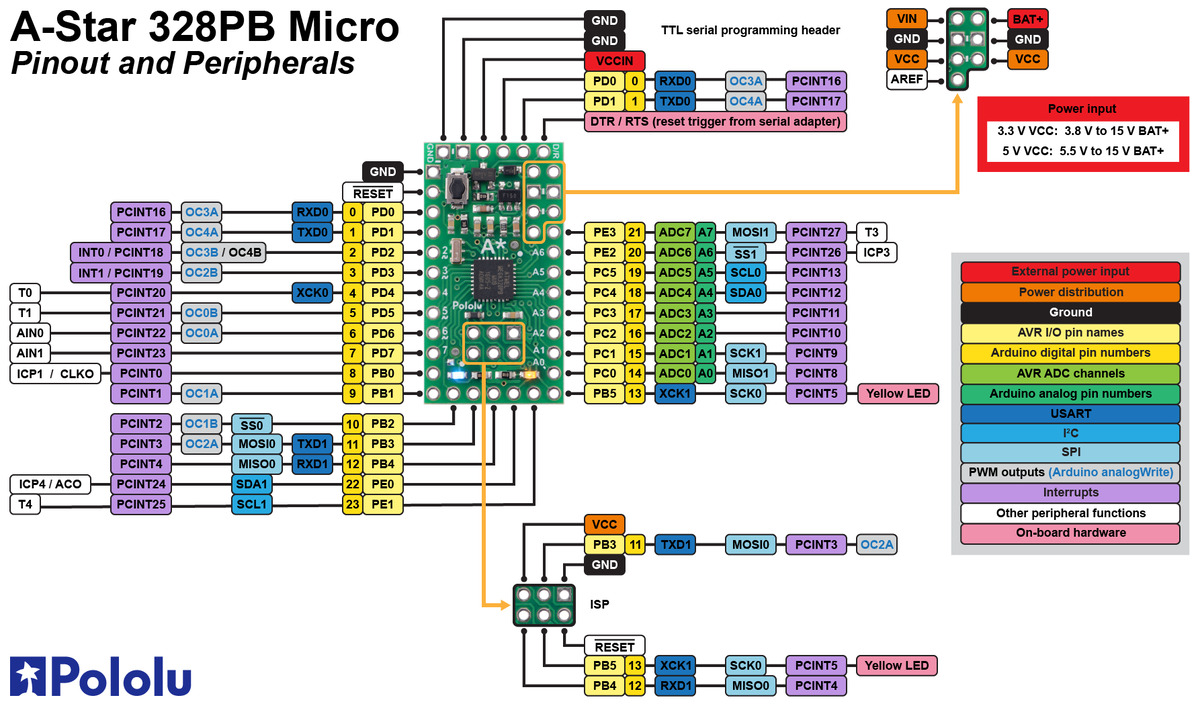 |
A-Star 328PB Micro pinout diagram. |
|---|
The A-Star 328PB Micro provides access to all 24 I/O lines of the microcontroller and ships with an Arduino-compatible serial bootloader; you can also use an AVR in-system programmer (ISP) for access to the entire chip. We recommend our USB AVR Programmer v2, which supports both programming interfaces and can be configured to run at either 3.3 V or 5 V.
Last but not least, we are continuing our plan of offering new products at the highest quantity price break at single unit quantities as an introductory celebration. That means that for the first 100 customers, you can get an A-Star 328PB Micro for just $3.87! (Must use coupon code AS328PBINTRO; click to add the coupon code to your cart.)
While we assemble (and design and document and ship and support) the boards here in Las Vegas, we still get the bare PC boards from China, where they are currently on holiday celebrating Chinese New Year. That is constraining how many units we can make at the moment, so we are limiting shipments to 5 units per customer. However, the introductory coupon has no quantity limit, and you can order more than five at that price if you would like. Backordered units are likely to ship within a few weeks.
Related products




TI launches Robotics System Learning Kit (TI-RSLK) based on Pololu Romi platform
 |
| Image from TI Robotics System Learning Kit introductory video courtesy of university.ti.com. |
|---|
Texas Instruments just launched their new Robotics System Learning Kit (TI-RSLK), a complete robotics kit and curriculum aimed at university students and based on our Romi platform. Twenty modules with lecture notes, lab activities, and over a hundred videos are all publicly available now.
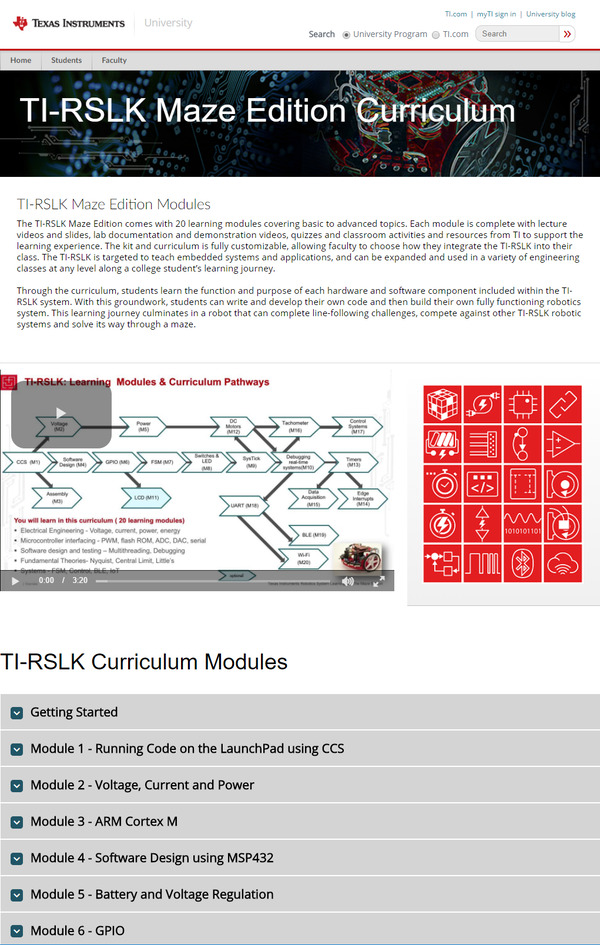 |
Image from TI Robotics System Learning Kit curriculum overview web page courtesy of university.ti.com. |
|---|
Several kits specifically for the course will be available soon through element14.
We are just starting to go through the ton of content ourselves since we were not directly involved in creating any of the course materials (except to the extent that TI used documentation from our products). We are excited about robotics and engineering education, and I am very interested to hear what you think of what TI is offering. Let me know, and I can pass your comments back to our contacts at TI, who of course are interested in the feedback, too.
 |
Image from TI Robotics System Learning Kit introductory video courtesy of university.ti.com. |
|---|
The versatile Romi chassis is available in a variety of colors as just a mechanical kit for those who want to do all of their own electronics development. We also offer a growing selection of supporting electronics that include the Motor Driver and Power Distribution Board that TI is using in the TI-RSLK (along with their own microcontroller and LaunchPad modular development system). The more integrated Romi 32U4 Control Board includes an Arduino-compatible ATmega32U4 microcontroller and is ready for expansion with a Raspberry Pi or compatible embedded computer module.


How I picked our new machines (and what they mean for you!)
 |
The new equipment I have been sharing for the past two weeks (here and here) represents our biggest manufacturing capacity increase in five years. Today I will go into more detail about the pick and place machine and stencil printer we got, along with what it means for our customers.
Assembling a circuit board with surface-mounted components involves three main steps: printing solder paste on a bare circuit board, placing the components on the board, and then sending the board through an oven, which melts the solder paste, soldering the components to the board. You can see the steps in this video we made a while ago about how the A-Star 32U4 Micro gets made:
Pick and place machine
At the end of 2012, we got two very different pick and place machines, an SM421F from Samsung (which has since sold their electronics assembly equipment business to Hanwha) and an iineo from Europlacer. Both machines are very versatile, designed to place everything from the smallest components to large and tall parts, and we have run all of our products on both machines. I got both machines back then because each manufacturer made a compelling case, and I wanted to try both. The new machine we installed this month is another Europlacer machine. So… does that mean it’s better?
First off, the Europlacer machine is much bigger and more expensive than the Samsung/Hanwha machines, so the real comparison for this round of new equipment was two Hanwha machines vs. one from Europlacer. Each SM482 Plus has 120 feeder slots, so two of those machines have very similar feeder capacity to the 264 slots of the iineo+. The pair of Hanwha machines is also similar to the Europlacer option in terms of combined size and price. I should also say that we have had a great experience with both machines and vendors, and I do not regret having bought either of those machines in 2012. The Hanwha machine route had one major advantage: the machines, even individually, are faster than the Europlacer in the straight parts per hour component placement rate; with two of them, it should be no contest, with a combined advertised placement rate of around 60,000 components per hour vs. around 15,000 for the Europlacer machine. Having two smaller machines would also give us some more flexibility (we could operate them as two separate machines, running different products, as opposed to one big machine) and redundancy, so that we could keep at least some production running if one machine went down. The redundancy argument probably would have pushed me in the direction of the Hanwha, two-machine route, if we didn’t already have any other machines.
 |
But we did already have a Europlacer machine, so getting a second one would give us that redundancy. And despite the sustained placement rate being four times lower, we expect the Europlacer to actually be the faster option for our purposes. That’s because our products tend to be relatively small and simple, but we have hundreds of different products (and I want it to be thousands soon), so we need to be able to run many different products a day efficiently. We might get some of that efficiency from the Europlacer software, though it’s not that clear to me that there really is that much difference between the machines (as opposed to operator familiarity). The interchangeable carts should also help eventually, though I do not expect that to make much of an impact until we have more of them, and so far we just have enough to basically fill each machine. What I think matters the most is the huge feeder count on a single machine, minimizing the amount of component changes that have to be made from one product to the next. It’s inevitable that the raw throughput will be lower when the placement head has to on average travel farther from the board being assembled to the part in the machine, but for our mix of quantities, it’s worth it.
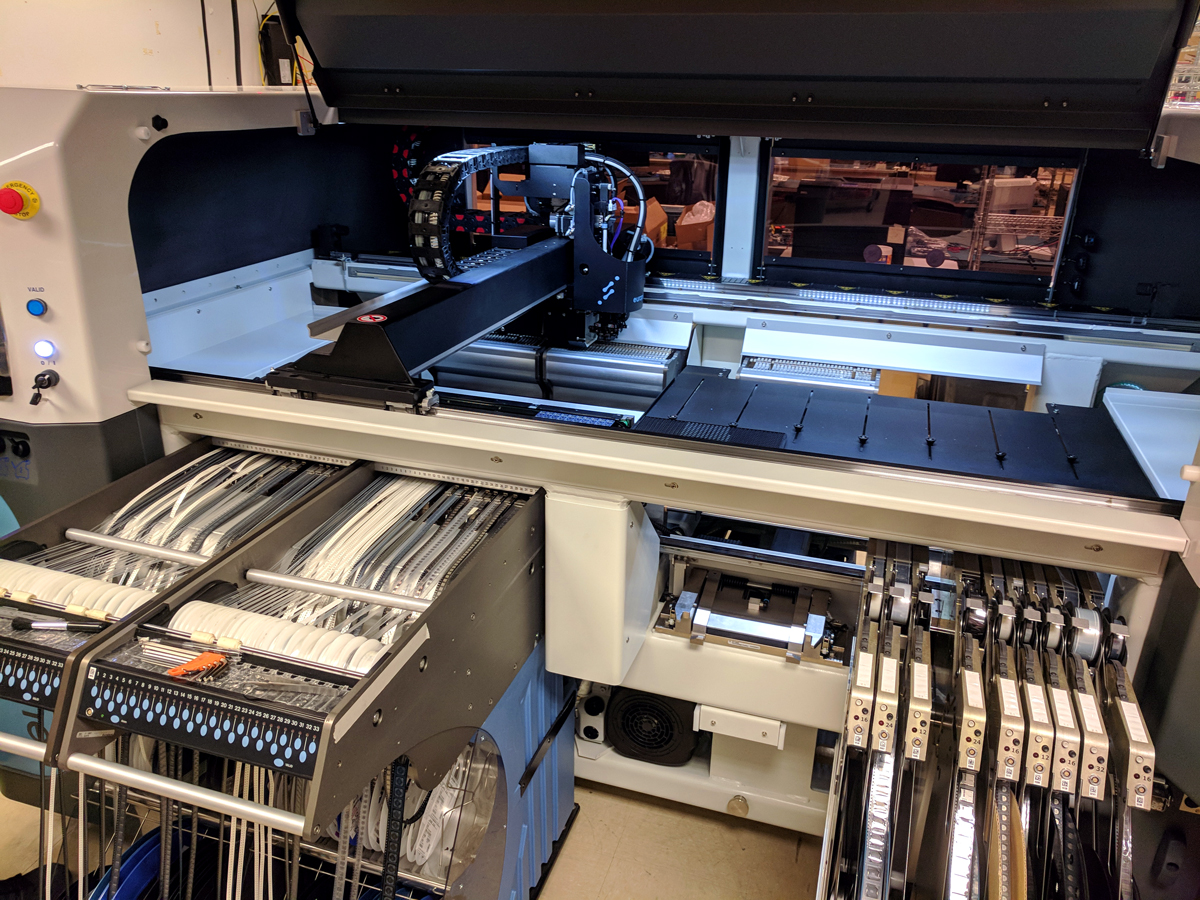
 |
132 feeder locations across four carts on the back side of the Europlacer iineo+ machine. There are 132 more on the other side! |
|---|
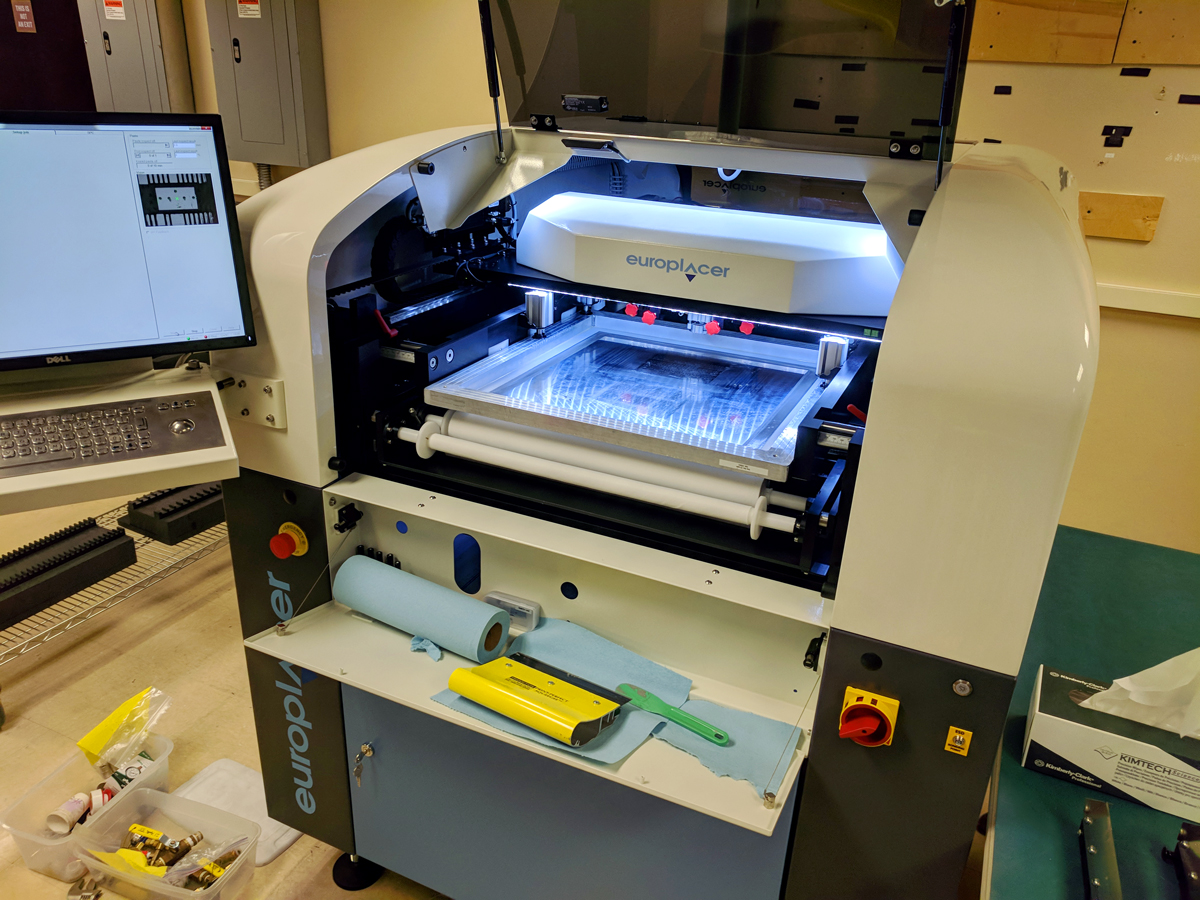
Stencil printer
For solder paste printing, I thought some more about a jet printer. The general idea is that the printer has the solder paste in a cartridge that moves all over the bare circuit board and squirts some on every pad, as opposed to squeegeeing a bead of solder paste through a stencil the way solder paste is more typically applied. I have been looking at MyData’s jet printers since they came out probably over ten years ago now, and the prospect of not needing stencils and being able to vary deposit thicknesses keeps being attractive, especially for our scenario where I want to be able to do just a few panels each of many different designs every day. But, at more than double the cost of a traditional stencil printer, the cost seems difficult to justify, especially since we cut our own stencils in-house. So, I ended up ordering another stencil printer from Europlacer since we are happy with the one we already have. MyData is now Mycronic, and you can see more about their jet printer at the Mycronic Jet Printer page.
 |
The technician from Europlacer performing the installations was disappointed that we were pairing the nice new color-coordinated stencil printer with our Samsung pick and place machine. |
|---|
Commitment to better manufacturing and lower prices
What does all this mean for our customers? (Other than a higher likelihood of getting to see an awesome machine running when you come visit us.) Partly I am sharing this because I expect most of you like making things, like to see how things get made, and would love to have machines like this of your own. More importantly, I want to remind you of the effort we are going through to bring you better products at lower prices. Having more of this extremely flexible manufacturing capacity means we can keep churning out new prototypes quickly and then be able to manufacture the products at a globally competitive price. Over the coming months, we will be assessing our manufacturing costs and lowering prices on many of our popular products, and new products will have lower prices as soon as we introduce them.
We are kicking that off with a substantial price cut on our popular time of flight distance sensors:
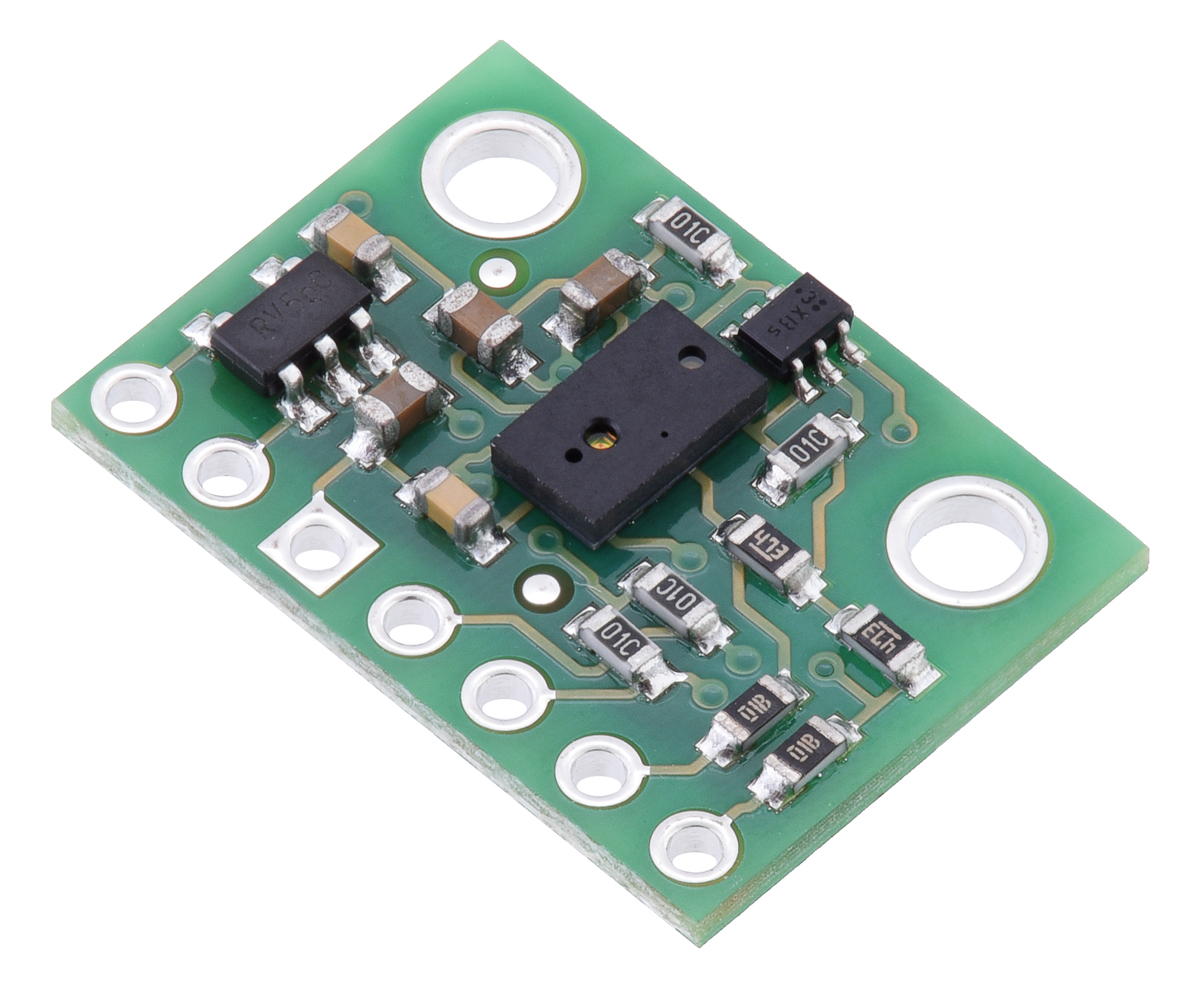 |
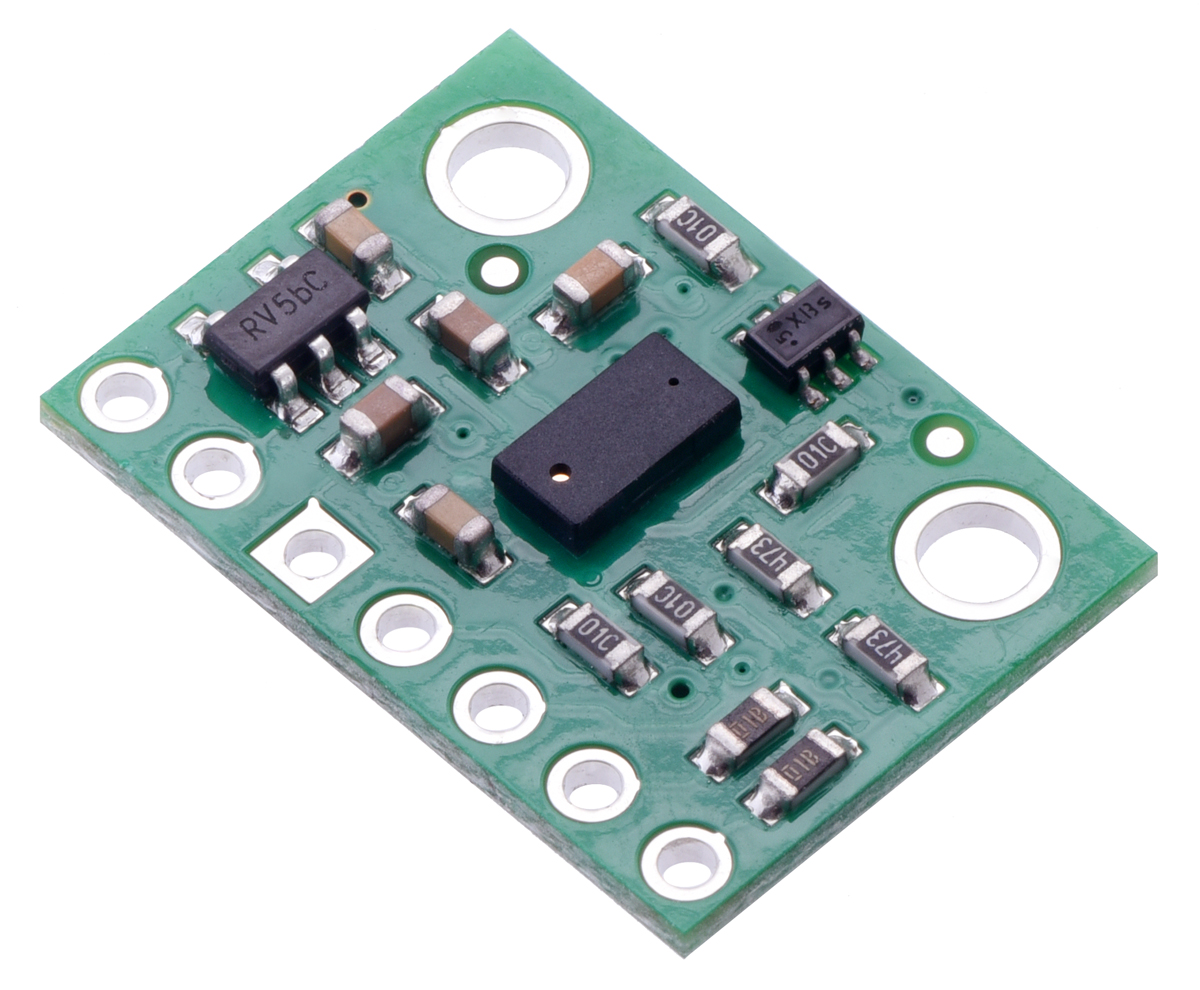 |
| VL6180X Time-of-Flight Distance Sensor Carrier with Voltage Regulator, 60cm max |
VL53L0X Time-of-Flight Distance Sensor Carrier with Voltage Regulator, 200cm Max |
And to help everyone share in our excitement, we’re offering the new, low, 100-piece pricing at single-unit quantities to the first 100 customers using coupon codes 2489PRICECUT and 2490PRICECUT (Click to add both coupon codes to your cart).
New equipment installation progress
Some more of our new equipment showed up yesterday, and installation has been progressing all week. Here are a few more pictures.
 |
Stencil printer selfie! |
|---|
 |
New Europlacer pick and place machine on the left, older one on the right. |
|---|
 |
Stencil printer ready for first print. |
|---|
 |
We like the Europlacer’s huge number of feeder slots. |
|---|
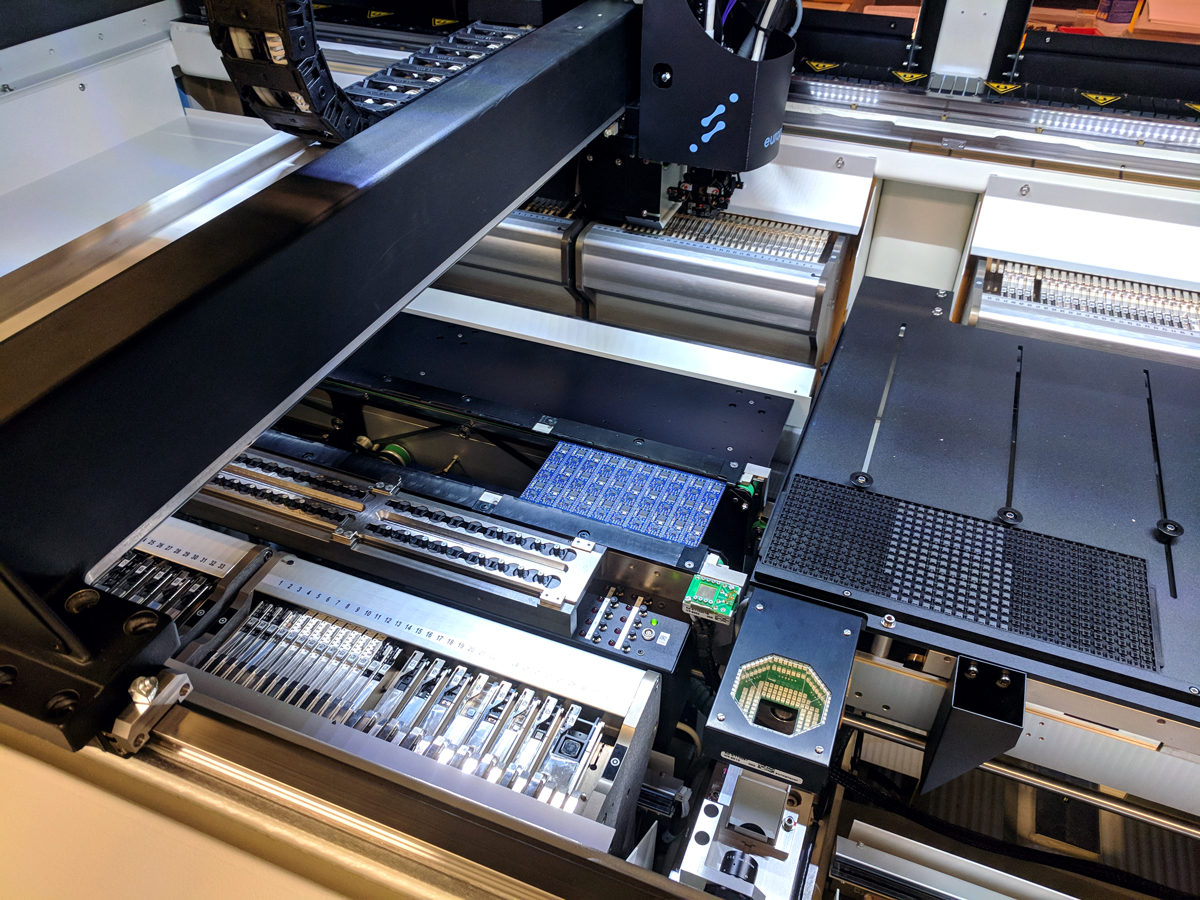 |
First production board on new Europlacer iineo+ pick and place machine, 7 February 2018. |
|---|
Europlacer’s iineo pick and place machine is one of the biggest and most versatile I know of, with space for up to 264 feeders (each feeder can hold a different component). For comparison, our Samsung pick and place machine, which itself has a decent feeder capacity compared to most machines, has 120 slots. We do not have any individual products that come close to requiring that many different components, but having such a huge feeder capacity means that we can run many different boards without having to change out a lot of parts. The feeders are also on carts that we can move around and between machines, which are also networked so that we can do things like set up new products on one machine and then run with the same setup on the other. I will write more soon about how this fits into our future plans, and about the other exciting new machine that is in the background of some of these pictures.
Picking and placing our new pick and place machine
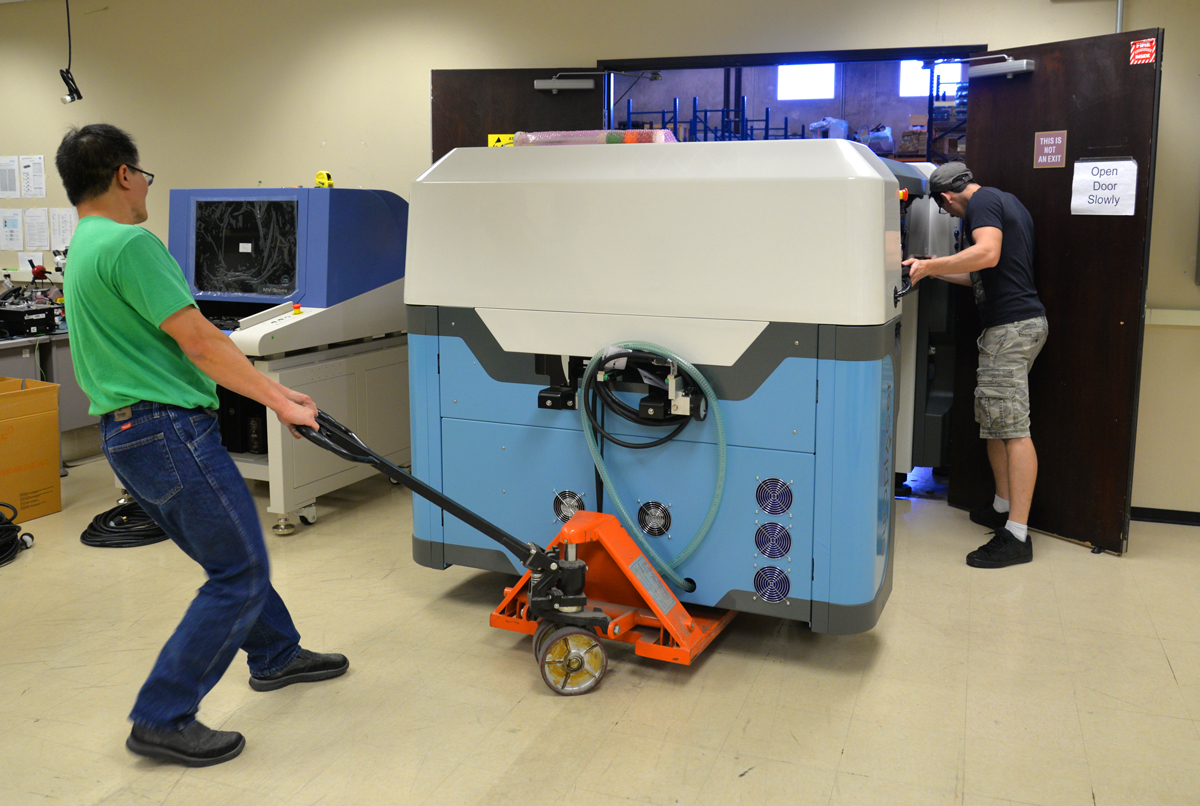
We got a big delivery at Pololu yesterday. Here are some pictures for you to share in the excitement!
 |
Seeing the truck pulling in with the crate on a flatbed trailer was a welcome sight after the difficulty last time, when we had to fish the crate lengthwise out of a covered trailer. |
|---|
 |
 |
Getting to uncrate the machine outside in short sleeves in January is just one of the perks of operating out of Las Vegas. |
|---|
 |
 |
 |
 |
Almost set for installation next week! |
|---|
I will post more about the machine and others we are installing once we have them up and running. For those of you wondering what it is, it is a pick and place machine, which is the kind of robot we use to build your robot parts. Here is a video of one of our existing machines in operation assembling a Zumo reflectance sensor array.
New Pololu Balboa T-Shirts!
 |
Our new Balboa T-shirts are here! They feature our latest robot, the Balboa 32U4 balancing robot, within an enlarged outline of the 43-tooth gear option for the Balboa gearbox, accompanied by our call to “Engage Your Brain”. These pre-shrunk cotton shirts are available in several colors (navy blue, cardinal red, or black) and a range of youth and adult sizes.
|
|
|



Related products

New products: MP6500 Stepper Motor Driver Carriers
 |
 |
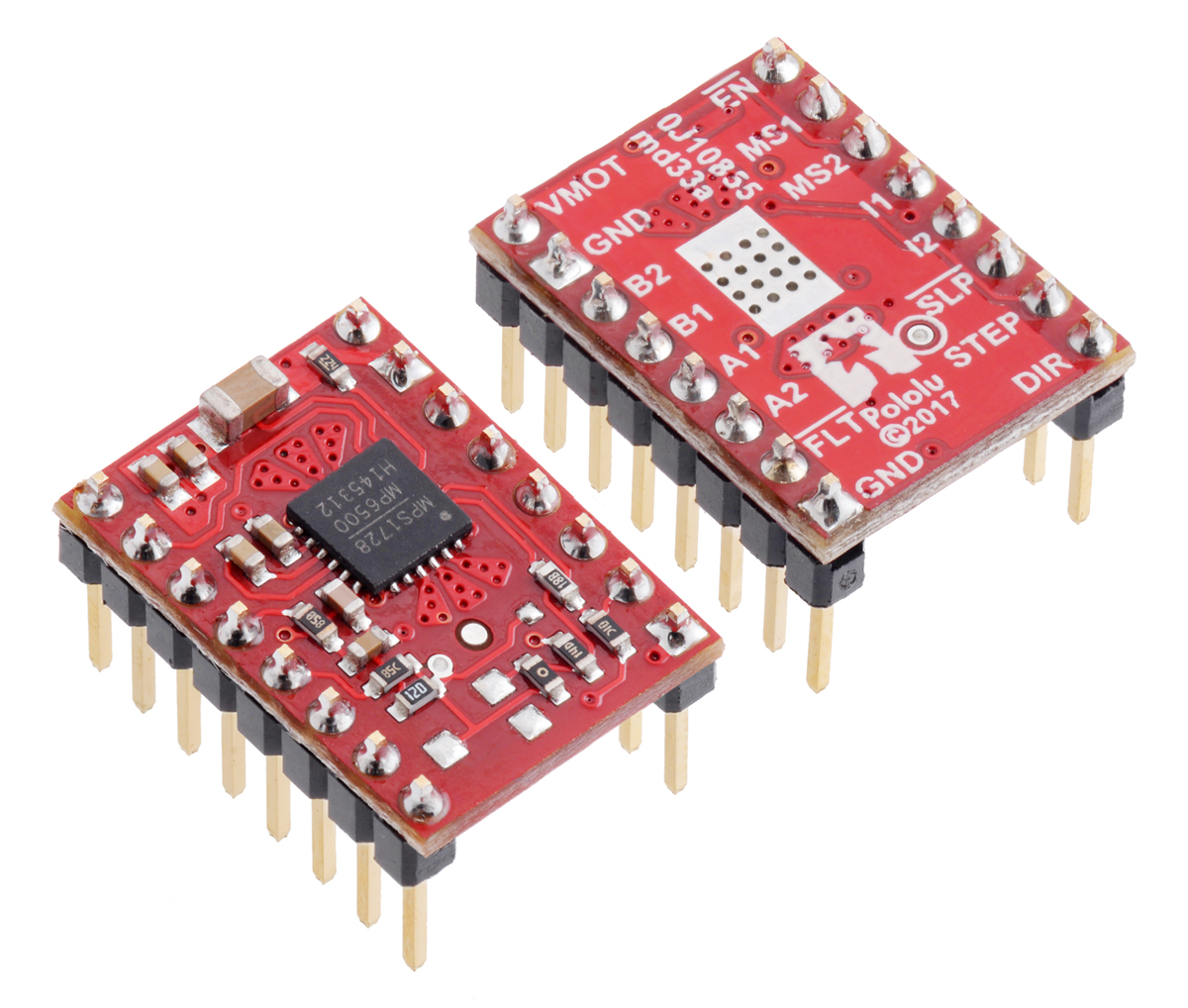
We are excited to expand our colorful selection of stepper motor drivers with carrier boards for the brand new MPS MP6500 stepper motor driver!
Monolithic Power Systems’ MP6500 can drive a bipolar stepper motor from a 4.5 V to 35 V supply with up to 1/8-step microstepping. On our four-layer, 2 oz copper carrier boards, the MP6500 can deliver up to approximately 1.8 A per phase continuously without a heat sink or forced air flow, making this new module the highest-current stepper motor driver we carry among all the ones that share this form factor.
14 March 2018 Update: After further testing of more units, our initial characterization of the maximum continuous current capability was too high, so we have lowered it to 1.5 A. Please keep in mind that the exact maximum current you can get out of the driver at a given temperature will depend on your supply voltage and stepper motor characteristics.
 |
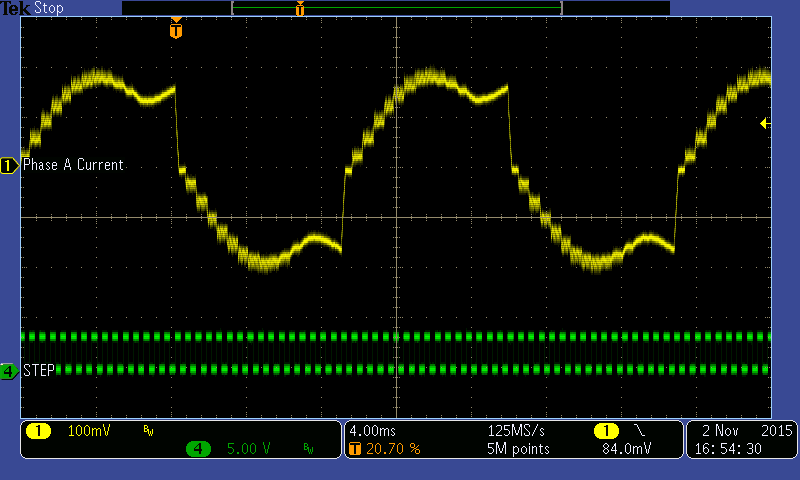
Unlike most other stepper motor drivers, the MP6500 features internal current sensing, which allows it to measure the motor’s coil current even during the off period of the PWM cycle. Combined with its automatic decay selection, this allows it to regulate the current especially accurately to produce smoother motion and higher speeds, as shown in the below oscilloscope capture from the MPS application note AN120 (1MB pdf).
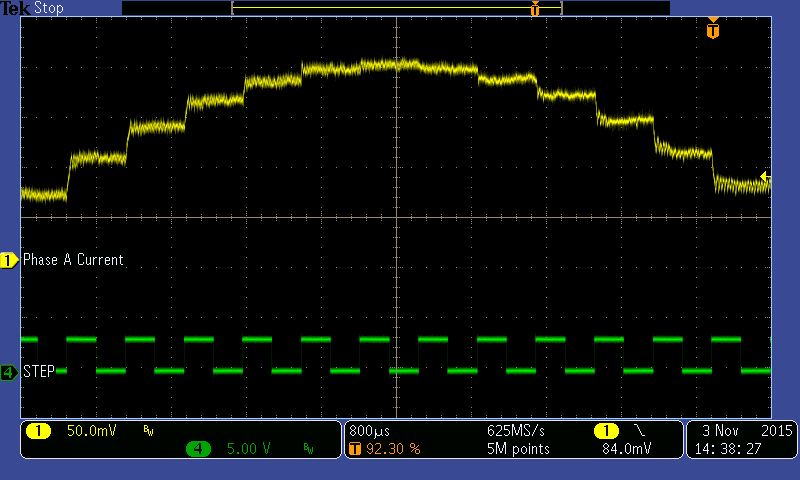 |
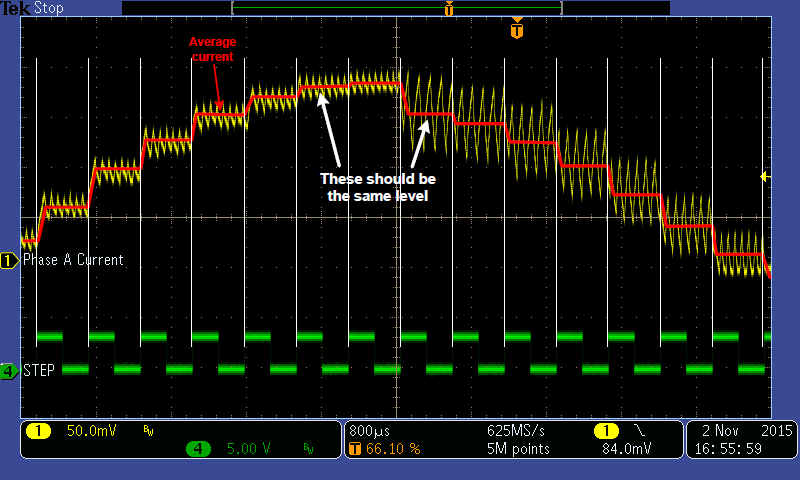
Compare this with waveforms from a stepper driver that uses a more typical method of peak current control:
|
|
In addition to a version with potentiometer current control like most of our other stepper motor drivers, we also offer the MP6500 on a board with digital current control. This second version enables a microcontroller to dynamically set the current limit in steps of 0.5 A (up to a maximum of 2 A) by simply driving one or two inputs low. Alternatively, supplying an analog voltage or PWM signal allows finer control of the limit within the 0 to 2 A range.
|
|


Introductory special: just $2.97 each! Must use coupon code MP6500INTRO, limited to first 200 customers, limit 5 per customer.
Related products


Want to move heavy loads? We've got the linear actuator for you!
 |
We have expanded our selection of Glideforce linear actuators from Concentric International to include their industrial-duty and medium duty series as steps up in power from their light-duty series that we have been offering for many years now.
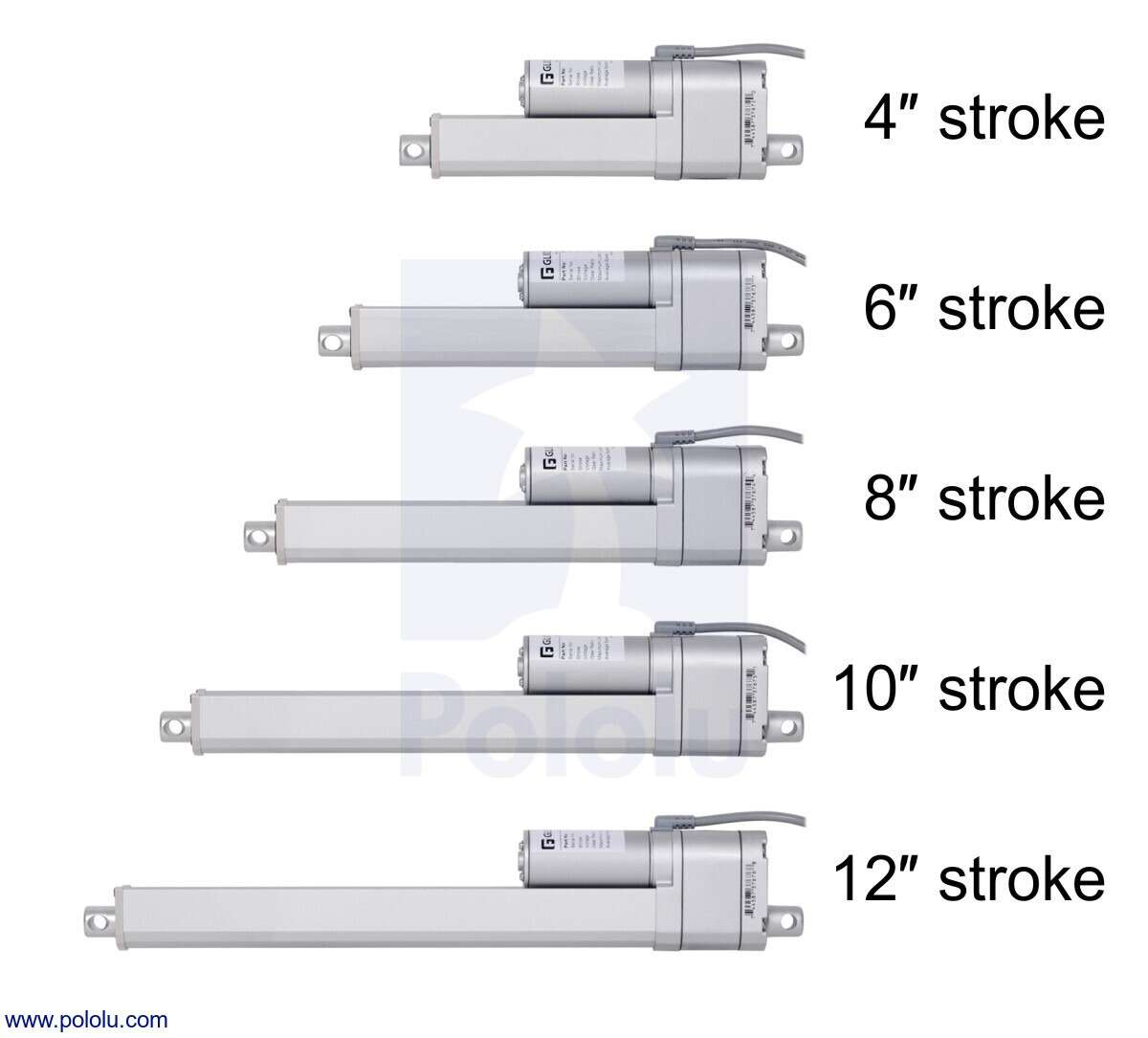
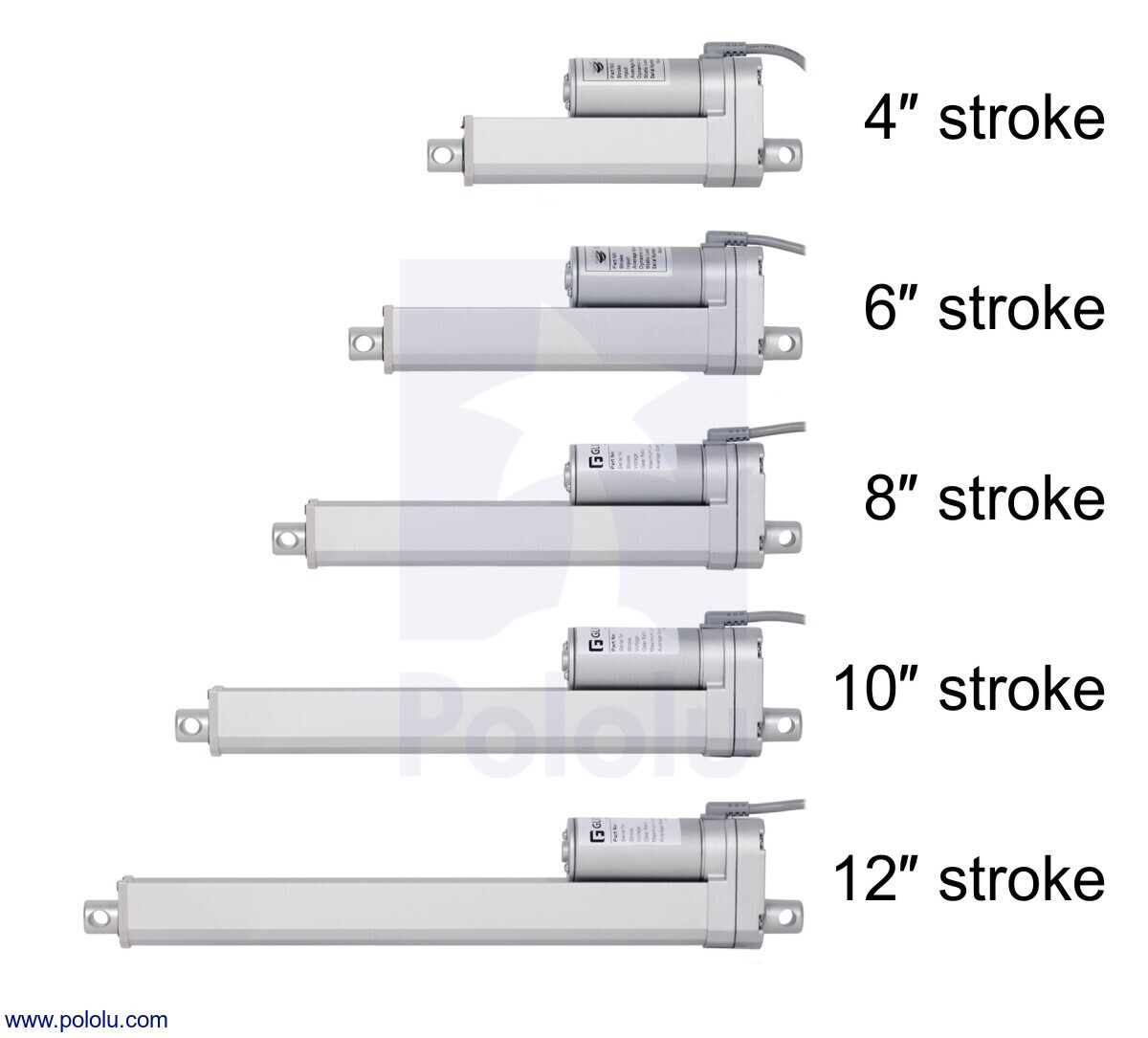
The medium-duty actuators are available in five different stroke lengths ranging from 4″ to 12″ and with or without feedback potentiometers, and they have a dynamic load rating of 225 lb, which means they can handle twice the load of their light-duty counterparts:
|
|
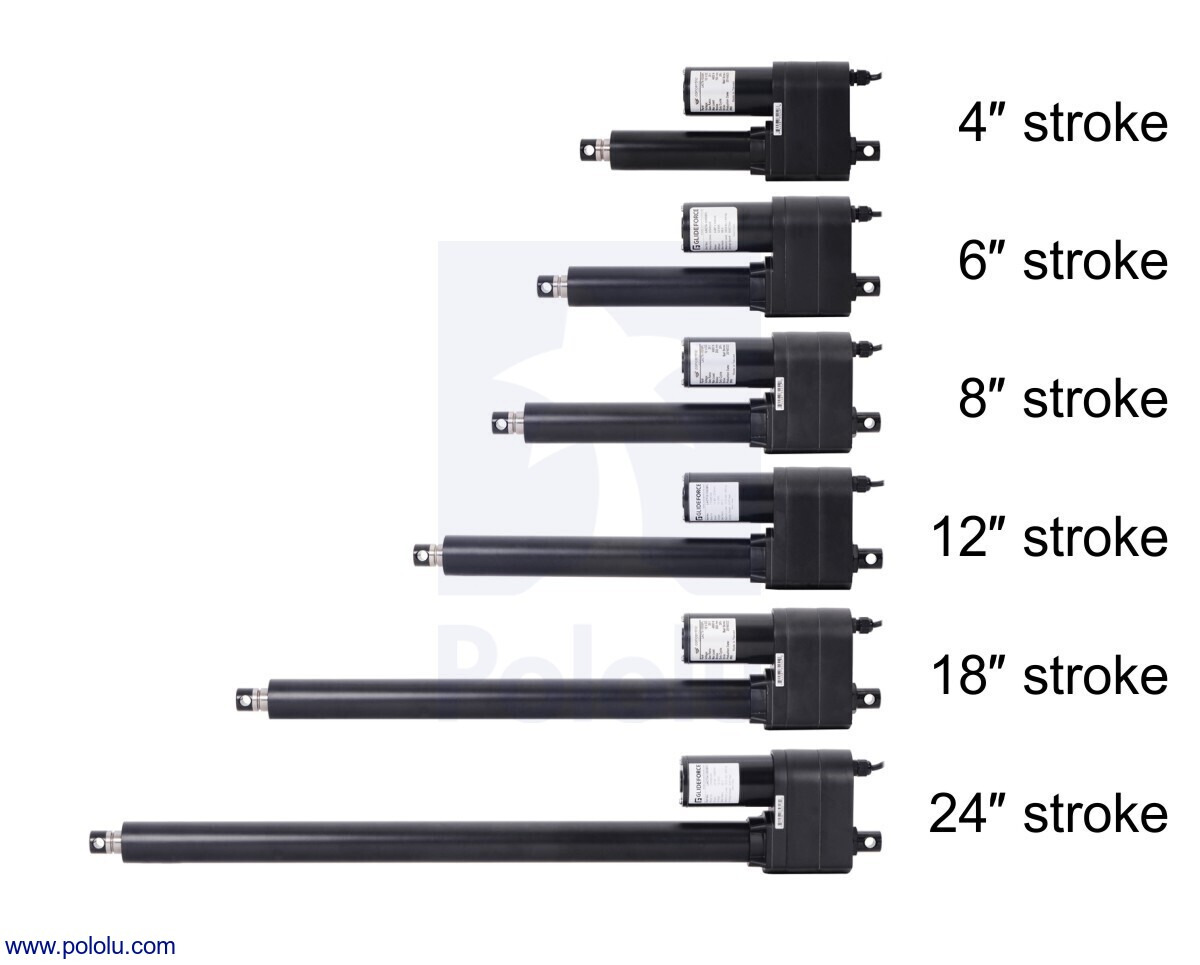
The industrial-duty actuators are real monsters compared to the medium-duty and light-duty units. The versions with an acme screw drive can handle dynamic loads up to 550 lb, and the versions with a ball screw drive (which is much more efficient than an acme screw) can handle dynamic loads up to a 1000 lb. Each drive option is available in six different stroke lengths ranging from 4″ to 24″ and with or without feedback potentiometers:
|
|

The following lets you compare all of our Glideforce linear actuator options:
| Actuator Type |
Max Dynamic Load |
No-Load Speed @ 12 V |
Current Draw @ 12 V |
Nominal Stroke Length |
With Feedback | Without Feedback | Approx. Weight |
|---|---|---|---|---|---|---|---|
| Light-Duty (LD) |
15 kgf [34 lbs] |
4.4 cm/s [1.7″/s] |
1.2 A – 3.2 A |
4″ | LACT4P-12V-05 | LACT4-12V-05 | 1.3 kg |
| 12″ | LACT12P-12V-05 | LACT12-12V-05 | 1.6 kg | ||||
| 50 kgf [110 lbs] |
1.5 cm/s [0.57″/s] |
2″ | LACT2P-12V-20 | LACT2-12V-20 | 1.2 kg | ||
| 4″ | LACT4P-12V-20 | LACT4-12V-20 | 1.3 kg | ||||
| 6″ | LACT6P-12V-20 | LACT6-12V-20 | 1.4 kg | ||||
| 8″ | LACT8P-12V-20 | LACT8-12V-20 | 1.5 kg | ||||
| 10″ | LACT10P-12V-20 | LACT10-12V-20 | 1.5 kg | ||||
| 12″ | LACT12P-12V-20 | LACT12-12V-20 | 1.6 kg | ||||
| Medium-Duty (MD) |
100 kgf [225 lbs] |
1.5 cm/s [0.58″/s] |
1.1 A – 4.6 A |
4″ | MD122004-P | MD122004 | 1.1 kg |
| 6″ | MD122006-P | MD122006 | 1.2 kg | ||||
| 8″ | MD122008-P | MD122008 | 1.3 kg | ||||
| 10″ | MD122010-P | MD122010 | 1.4 kg | ||||
| 12″ | MD122012-P | MD122012 | 1.5 kg | ||||
| Industrial-Duty (ID) with Acme screw drive |
250 kgf [550 lbs] |
1.7 cm/s [0.66″/s] |
2.4 A – 13.2 A |
4″ | LACT4-500APL | LACT4-500AL | 4.2 kg |
| 6″ | LACT6-500APL | LACT6-500AL | 4.4 kg | ||||
| 8″ | LACT8-500APL | LACT8-500AL | 4.7 kg | ||||
| 12″ | LACT12-500APL | LACT12-500AL | 5.3 kg | ||||
| 18″ | LACT18-500APL | LACT18-500AL | 6 kg | ||||
| 24″ | LACT24-500APL | LACT24-500AL | 7 kg | ||||
| Industrial-Duty (ID) with ball screw drive |
450 kgf [1000 lbs] |
1.7 cm/s [0.66″/s] |
2.4 A – 13.2 A |
4″ | LACT4-1000BPL | LACT4-1000BL | 4.6 kg |
| 6″ | LACT6-1000BPL | LACT6-1000BL | 4.9 kg | ||||
| 8″ | LACT8-1000BPL | LACT8-1000BL | 5.1 kg | ||||
| 12″ | LACT12-1000BPL | LACT12-1000BL | 5.6 kg | ||||
| 18″ | LACT18-1000BPL | LACT18-1000BL | 6.5 kg | ||||
| 24″ | LACT24-1000BPL | LACT24-1000BL | 7.4 kg | ||||
Note that we are currently out of stock of many of the industrial-duty versions, but we will be getting more as Concentric makes them available. For units where the expected lead time is several months, we have disabled backorders; please contact us if you are interested in placing an order now for one of those units.
To see all of our linear actuators, visit our linear actuator category.
Free USA shipping on hundreds of Pololu metal gearmotors
 |
Since my last post about free shipping in the USA, we expanded the program to include orders consisting of $40 or more in free add-on shipping items. And today, we added almost 300 different metal gearmotors to our selection of products that ship for free in the USA. (Don’t worry, we don’t pile up actual good production motors like we did in that picture; those were returned by an infamous, once-skyrocketing startup.)
Closed December 25 and January 1
 |
We will be closed for Christmas on Monday, December 25 and for New Year’s Day on Monday, January 1. Orders placed after 2 PM Pacific Time on December 22nd or 29th will be shipped on the following Tuesdays.
And last call for our Christmas sale — only about 15 hours to go!

Merry Christmas and happy New Year!


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










