Pololu Blog »
Pololu Blog (Page 24)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
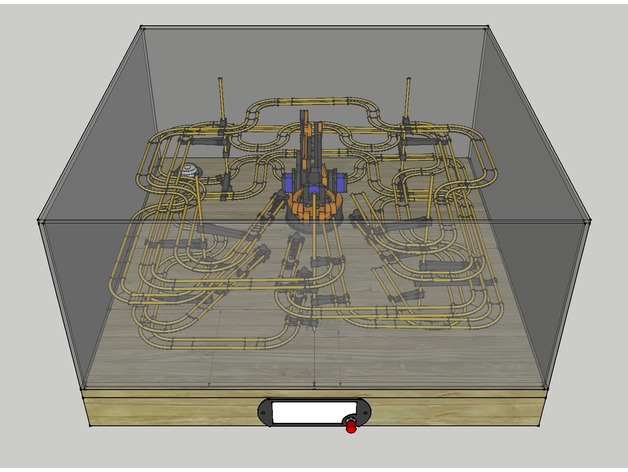
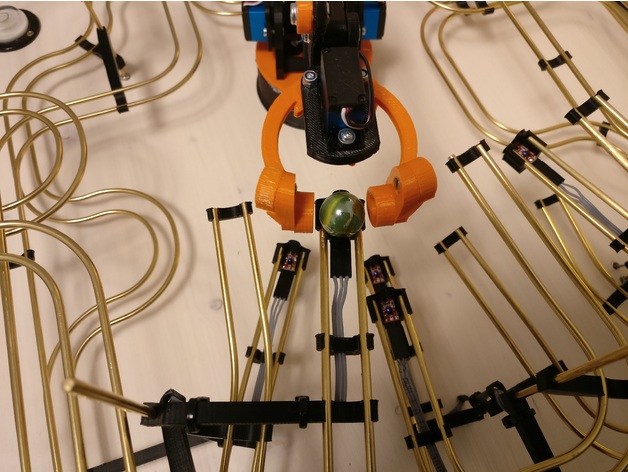
Maestro-controlled robot arm conducts rolling ball kinetic sculpture
Erik Pettersson’s interactive sculpture, Roball, is a gripping take on the classic rolling marble kinetic sculpture. Roball uses a robotic arm to pick up a small ball and randomly place it on one of five tracks, where it twists and turns as it rolls down the track, eventually coming to rest at a holding station. The input to the system is a single pushbutton, and when the user presses the button, the arm picks the ball up wherever it stopped. Then, the device randomly selects another path, moves the marble to the start of that track, and releases it. A 12-channel Maestro controls the whole system and analog sensors (which might be our QTR-1A) at each holding station at the end of each track help not only detect the ball, but help the Maestro randomize its next move. Because of the ball’s non-uniform surface, the analog sensor will read different values depending on how the ball is positioned. That reading is then used in a calculation to determine what track to roll the ball on next.
You can learn more about this project on its Thingiverse page.
|
|
Related products


New product: Tic T500 USB Multi-Interface Stepper Motor Controller
Our Tic stepper motor controllers are pretty awesome, and the new Tic T500 we released today should make stepper motors even more accessible for your next project. This latest version features a broad 4.5 V to 35 V operating range that covers everything from small 2-cell lithium battery packs up to 24 V batteries or power supplies while costing just $20 in single-piece quantities. This video gives you a quick overview of what the Tic stepper motor controllers offer:
The Tics make basic speed or position control of a stepper motor easy, with support for six high-level control interfaces:
- USB for direct connection to a computer
- TTL serial operating at 5 V for use with a microcontroller
- I²C for use with a microcontroller
- RC hobby servo pulses for use in an RC system
- Analog voltage for use with a potentiometer or analog joystick
- Quadrature encoder input for use with a rotary encoder dial, allowing full rotation without limits (not for position feedback)
The Tic T500 is available with connectors soldered in or without connectors soldered in. Here is a handy comparison chart with all three Tic stepper motor controllers:
 Tic T500 |
 Tic T834 |
 Tic T825 |
|
|---|---|---|---|
| Operating voltage range: | 4.5 V to 35 V(1) | 2.5 V to 10.8 V | 8.5 V to 45 V(1) |
| Max current per phase (no additional cooling): |
1.5 A | 1.5 A | 1.5 A |
| Microstep resolutions: | full half 1/4 1/8 |
full half 1/4 1/8 1/16 1/32 |
full half 1/4 1/8 1/16 1/32 |
| Automatic decay selection: |  |
||
| Price (connectors not soldered): | $32.95 | $42.95 | $42.95 |
| Price (connectors soldered): | $34.95 | $44.95 | $44.95 |
1 See product pages and user’s guide for operating voltage limitations.
Basically, the new T500 does not offer the finer microstep resolutions of the T834 and T825, and the T834 supports very low operating voltages while the T825 supports higher operating voltages.
For those of you interested in more of the details of the stepper motor driver, the Tic T500 uses the new MP6500 from MPS, which we also offer on some low-cost MP6500 breakout boards with analog (small trimmer potentiometer) and digital (via PWM) current limit setting options.
In keeping with the tradition we started this year, we are offering an extra discount for the first customers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code T500INTRO can get up to two units for just $15.53! (Click to add the coupon code to your cart.) And we’ll even cover the shipping in the US! Note that this introductory offer applies only to the units without connectors soldered in.
Related products


We're having a Pi Day sale, and it starts tonight!
Pi Day is nearly upon us, and to celebrate, we are discounting a variety of exciting products that can be loosely associated with “Pi”. The sale starts tonight at 8:36 PM PDT and runs through the end of the 15th. And in case you are wondering about the strange start time, that makes the sale 3.14159 days long in yet another tribute to this wonderful irrational number (if it bothers you that 3.14159 is not irrational, you can pretend that the sale lasts exactly π days).
Check out the sale page for more information (and check out piday.org for more information on Pi Day)!
Five Mini Maestros control an interactive array of 98 mirrors
MIRR, which stands for Mobile Interactive Responsive Reflector, is an interactive installation that responds to people’s movement by independently rotating elements in its array of 98 mirrored panels. A FEETECH Mini Servo FT1117M actuates each panel and a total of five Mini Maestros control the servos. People can also use a custom box of arcade buttons to independently move each panel. You can read more about how MIRR works in this post on our forum.
|
|


Related products


February 2018 new equipment wrap-up: 3D AOI
 |
My posts last month (here, here, and especially here) about the new electronics manufacturing equipment we installed focused on our new pick and place machine and stencil printer. This post is about the other major new machine we got at the same time, an automated optical inspection (AOI) machine from Mirtec.
AOI machines have cameras that move around over an assembled board to take a bunch of pictures that then get processed to determine whether or not the board is assembled correctly. The machines often have several cameras that enable taking pictures from various angles, along with fancy lighting to variously illuminate the boards and components being inspected. Our AOI machines have rings of LEDs of different colors at different angles, so that, for example, red light highlights a different portion of a solder fillet than blue light. This picture shows a panel of our Dual G2 High-Power Motor Drivers in one of our older AOI machines:
 |
A panel of Dual G2 High-Power Motor Drivers illuminated by blue LEDs during automated optical inspection (AOI). |
|---|
The tricks with lighting are basically attempts to generate more three-dimensional information than you can get with just 2D pictures out of a camera. What is exciting about our new machine is that in addition to the traditional lighting and cameras, it also has a sophisticated sensor for doing precise height measurements everywhere along a component. Machines with this kind of sensor are called 3D AOI machines.
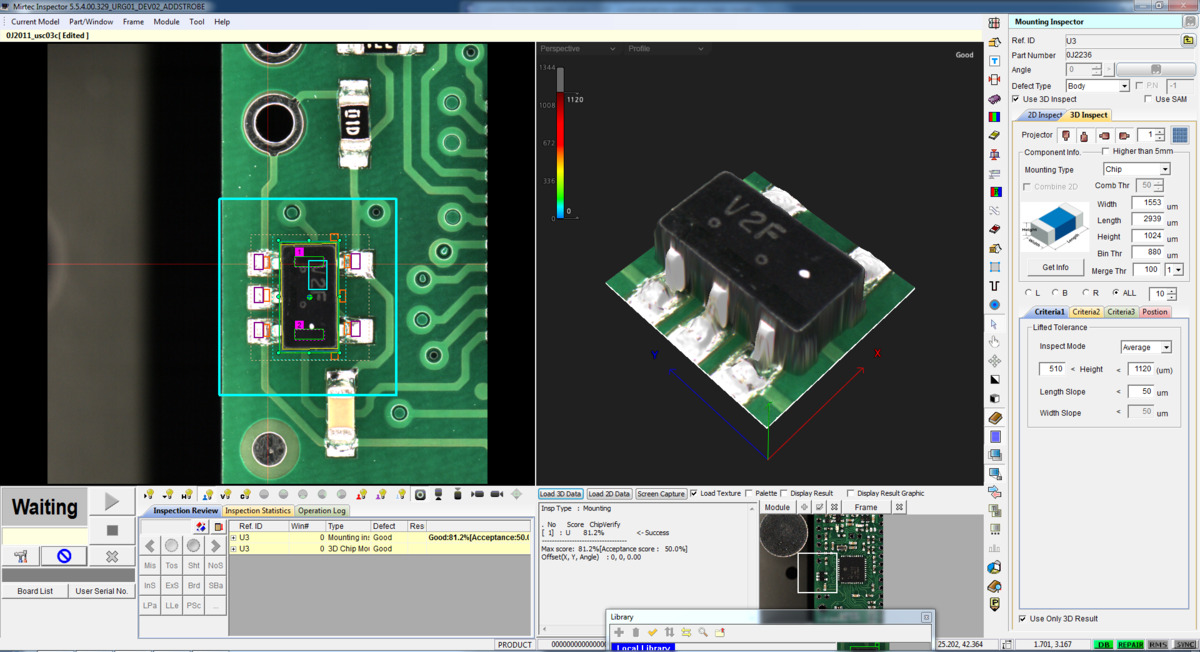 |
5-pin SOT-23 component getting set up for 3D automated optical inspection (AOI). |
|---|
The machine we got is Mirtec’s latest AOI machine, the MV-3 OMNI, which is a desktop or batch version of their inline inspection machine that has the same technology. I ordered the machine with the optional stand, which turned out to be a good thing because for a desktop machine, this thing is huge. The crate was much larger than I expected, and while not requiring a 10,000 pound forklift rental like the pick and place machine, we did have to use our fork extensions.
 |
 |
Out of the crate, the machine and stand are quite a bit smaller. Something to keep in mind for anyone considering such a machine is that this one is too big to fit through a single three-foot door.
 |
We had an especially busy week, with the installation and training for the AOI machine happening at the same time we were doing the Europlacer pick and place machine and stencil printer installation that I wrote about earlier.
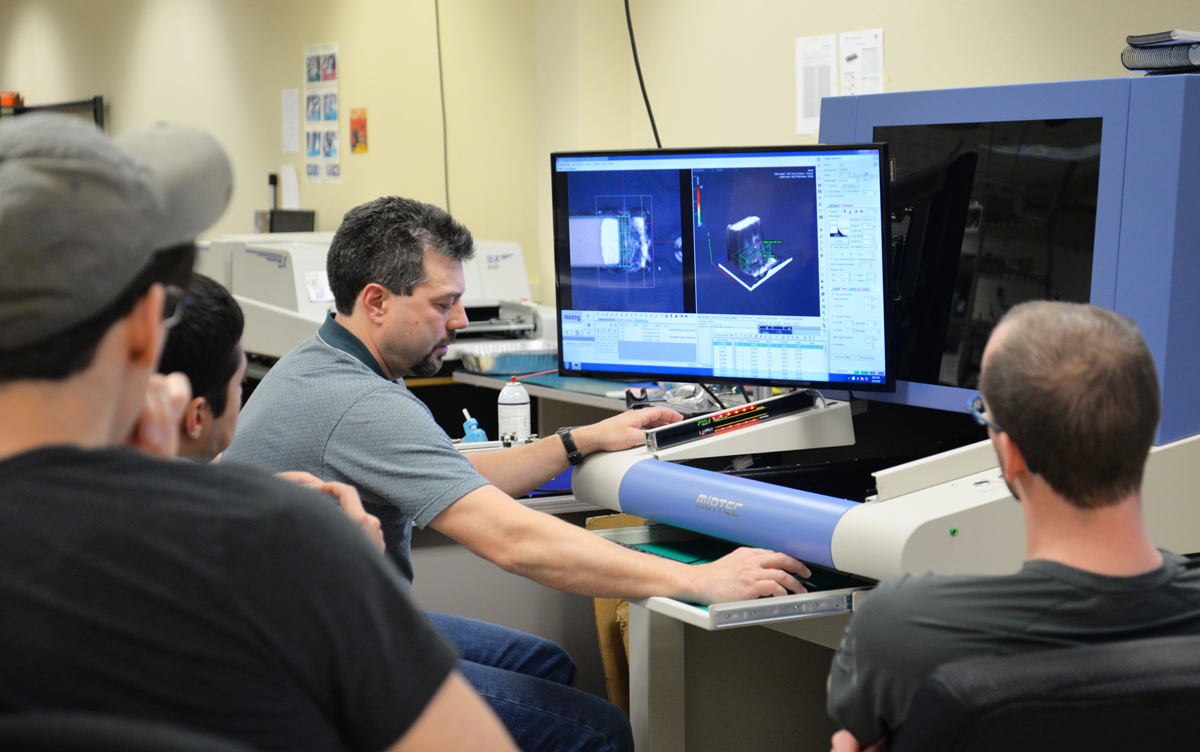
 |
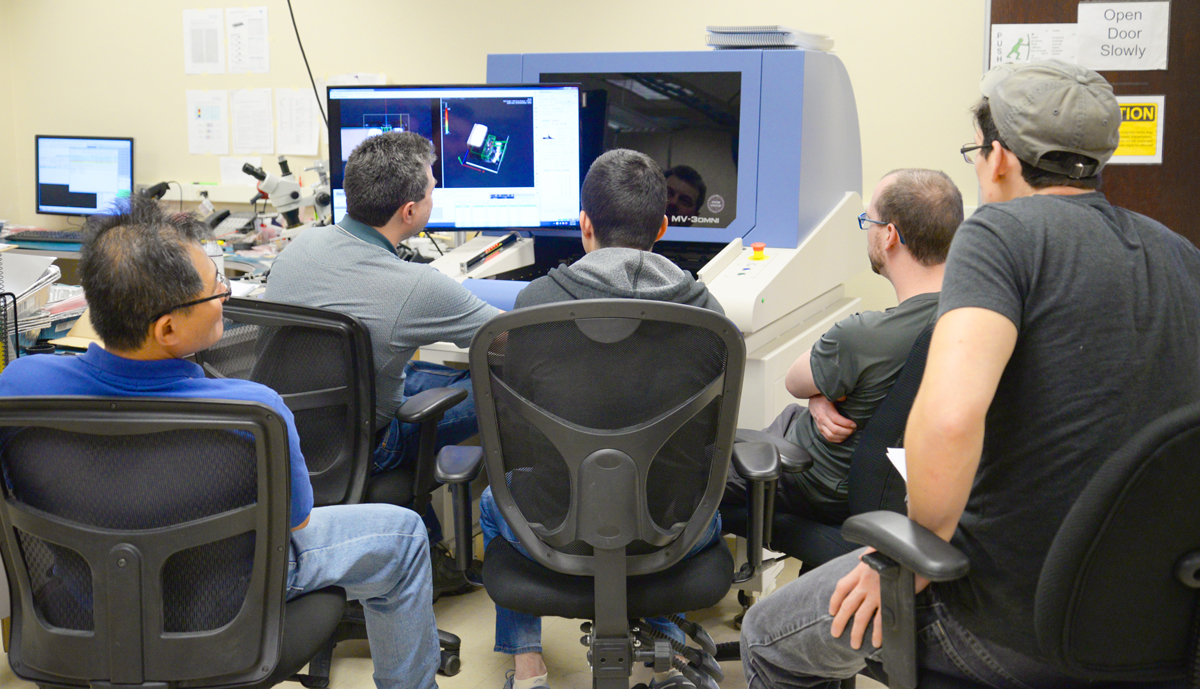 |
Mirtec MV-3 OMNI 3D AOI machine training. |
|---|
 |
Our Yestech AOI machines are visible in the background of that last training photo. (They are also featured in our The Manufacturing of A-Star 32U4 Micro video.) We already performed 100% AOI on every board we made before we got this latest machine. We are happy with those machines, and since we had two, capacity and redundancy were not primary motivations for getting this new one. With any piece of equipment like this, the challenge is to find every possible defect without generating a lot of false positives. If the settings are too lax, or the machine is not capable enough, defects will make it through, but it’s not enough to just flag every mismatched pixel since the ultimate authority is still the human operator that inspects every spot the machine identifies as suspect. If the machine inundates the operator with a thousand possible defects for every actual defect, the operator is likely to miss the one actual problem. It’s difficult to characterize this since there are many different components and every design is different, plus how we set up or train the machines also matters a lot.
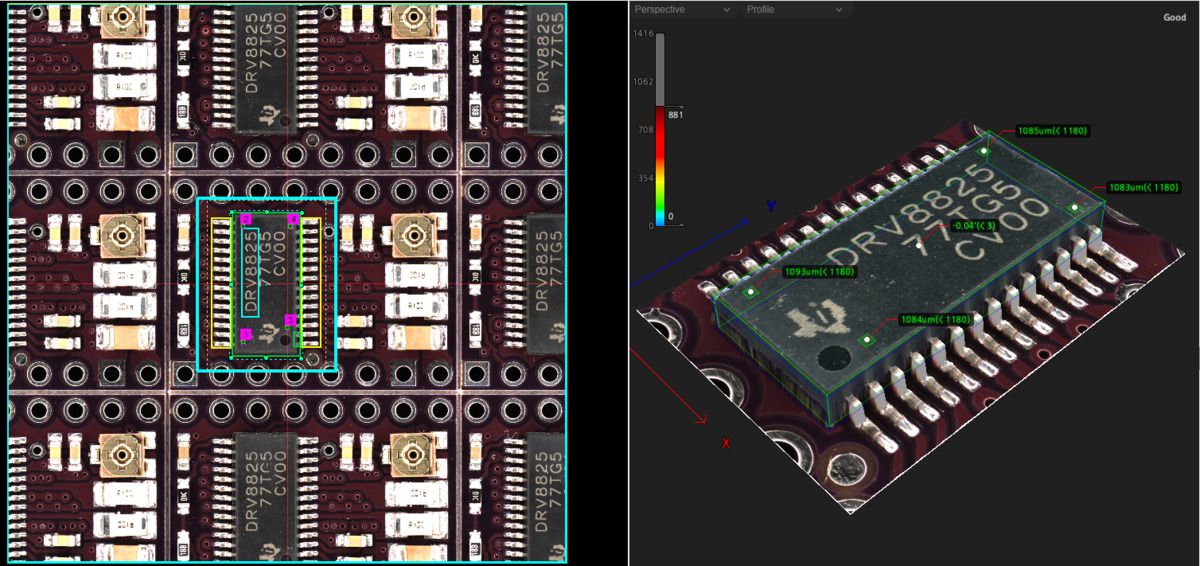
|
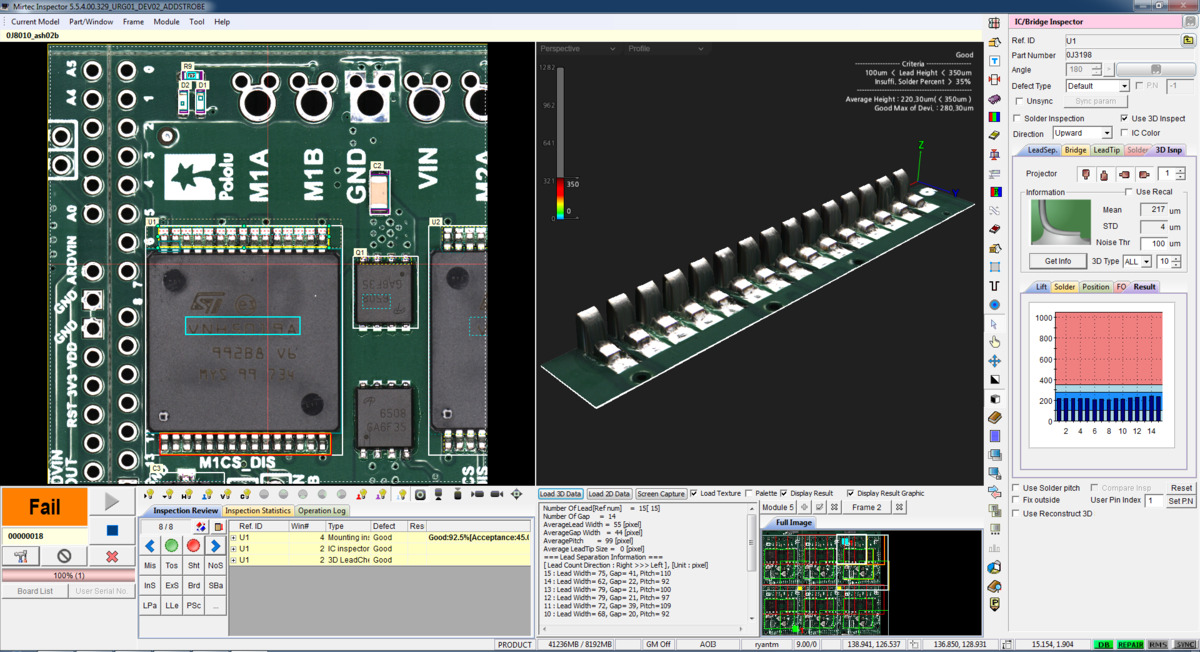
3D automated optical inspection (AOI) setup for Pololu DRV8825 stepper motor driver carrier. |
|---|
So, the main motivation for getting this new machine was the hope that it will give us more capabilities going forward to have the highest possible confidence in the quality of our products. The new machine is almost twice the cost of the older ones, and especially with the 3D capability, it should be able to deliver that. Our first impressions have been very positive, but to really know, it will take some time to get familiar with the machine’s strengths and weaknesses and to integrate it well into our manufacturing processes.
 |
3D automated optical inspection (AOI) setup for Pololu Dual VNH5019 Motor Driver Shield for Arduino. |
|---|
Maestro animated pilot in RC model aircraft
 |
A Maestro commands this Luftwaffe pilot to direct his steely-eyed gaze out into the wild blue yonder. |
|---|
Klaus Herold, who makes RC models of World War II aircraft, used one of our Maestro servo controllers to elevate one of his German Luftwaffe models to new heights. A 6-channel Micro Maestro adds a touch of reality to his model by animating the movement of the head of the pilot. The movement has two degrees of freedom: the head rotates side to side and tilts up and down. Additionally, the cockpit canopy extends and retracts. You can see the pilot in action in the video below:
Related products

Video: Introducing the Tic Stepper Motor Controllers
Our Tic Stepper Motor Controllers make basic control of stepper motors easy. This quick video shows you all the control interfaces you can use with our Tics to add stepper motors to your projects:
Making this video was actually the first time I’ve had a chance to play around with the Tics, and I was pleasantly surprised at how quickly I was able to set up the Tic with each interface option. Once I had everything connected, it only took a few minutes using the control software to get things moving for each setup.
This video also gives a sneak peek of our new Tic T500 (the red Tics in the opening shot). Like our new stepper motor drivers, the T500s are based on the MPS MP6500 bipolar stepper motor driver. Keep an eye on this blog for their release in the coming weeks.
Related products




Element14 begins pre-sales of the TI Robotics System Learning Kit (TI-RSLK)
 |
TI Robotics System Learning Kit banner courtesy of university.ti.com. |
|---|
As we posted a few weeks ago, Texas Instruments recently announced that they were launching a new curriculum designed for university students and based upon our Romi robot platform.
Today, element14 announced pre-order sales of the three kit options. We hear interest has been very strong, so make sure to reserve yours right away if you want to get one from the initial production run. If you do get one, let us know what you think of it!


Purchasing electronics components in America
 |
I am a little proud (but mostly embarrassed) that I still do basically all of the electronics component purchasing for Pololu. Today I am writing about buying components because their prices have a huge impact on the end price of our products, especially when we work to cut down other costs as I have been discussing lately. Buying parts when trying to compete globally is more frustrating than you might think, and I hope that writing this will help trigger some conversations that will help us do better and also encourage component manufacturers and distributors to better support small electronics manufacturers in the United States.
I buy almost all of the electronic components that go into our products from suppliers in the United States. That includes integrated circuits, discrete semiconductor products like transistors and diodes, resistors, capacitors, inductors, and so on. The only parts I do not buy in America are components like connectors and electromechanical devices like switches and buzzers. This post is mostly about buying components in the US from US suppliers, but I will briefly touch on the non-US components to provide some background and comparison.
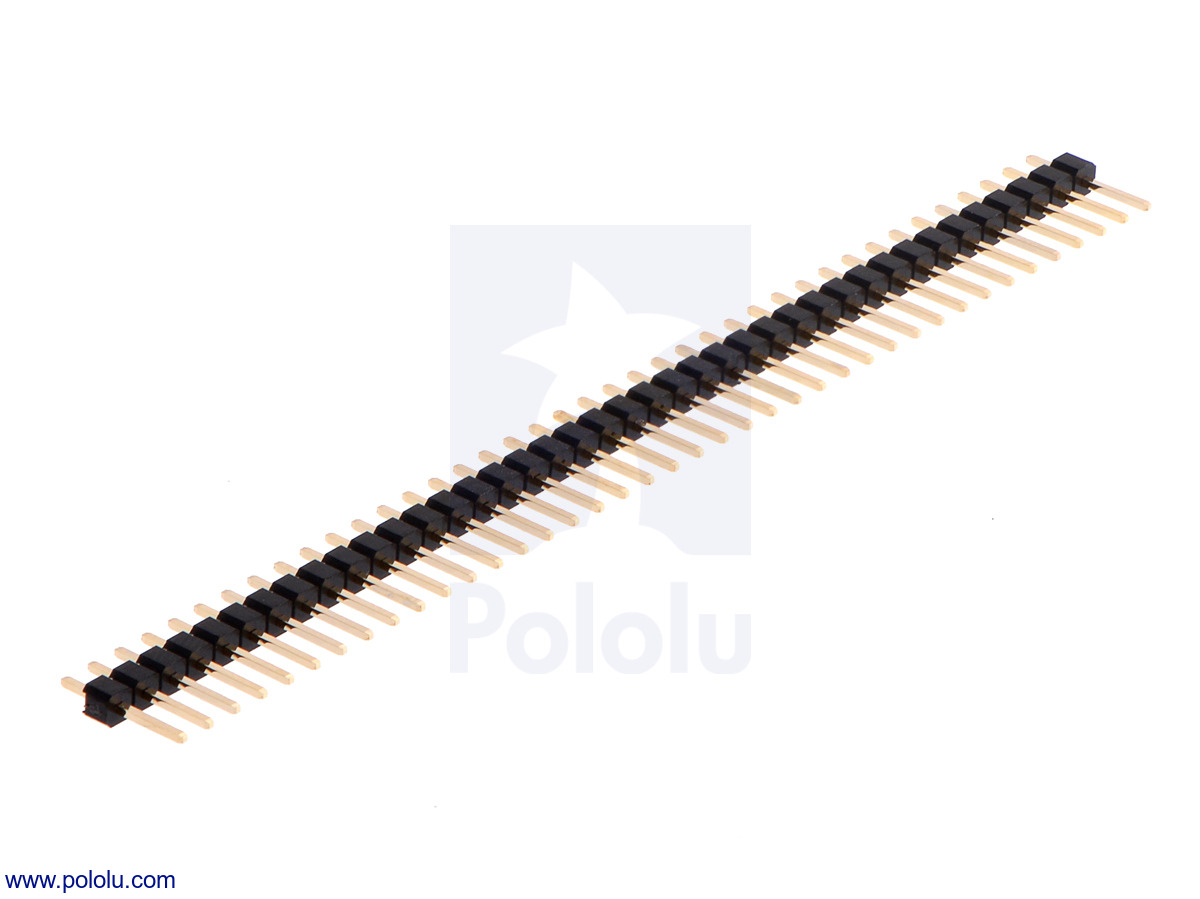 |
There are two main reasons for those non-US components: they are much cheaper than similar parts in the US and we can evaluate that they are good enough. That second reason is important because counterfeits and fake parts are a big problem in the electronics industry. We can look at something like a 0.1" male header or an electromagnetic buzzer and see basically what it is. Once we can be confident that a component or supplier is good enough for the level of performance and reliability we need from our products, we can look at prices to see whether it’s worth the extra hassle (and that amount of hassle keeps going down) to get the components overseas, which pretty much means China (and Taiwan, in case that distinction is meaningful). And that price difference can be huge. When I started getting connectors directly from Taiwan over ten years ago, the price difference was approaching a factor of ten, meaning that for around a thousand dollars I could buy what would cost me ten thousand domestically. Some of the price differences seem to be getting smaller, but the components still seem to be easily three to five times cheaper in China. Early on (around 2005), local salespeople would ask me what prices I was getting in China, thinking they had some better deal or connection than I knew of; nowadays, they don’t even ask or try to compete.
With all the other component types, even for the most basic parts like resistors and capacitors, we are not really qualified to evaluate them, and I would not want to be responsible for doing quality control for millions of units even if we could analyze one particular instance of a resistor or capacitor and conclude that it is good enough. So, I only buy components from reputable brands through their authorized distributors, which means I buy basically all our components through American companies (with one exception I’ll get to soon that almost doesn’t feel like an exception, anyway). Those companies also tend to be the biggest electronic parts distributors in the world.
I still buy some components from the catalog-type sources that are probably familiar even to most students and hobbyists, like Digi-Key, Mouser, and Newark. Once upon a time, these companies printed large catalogs that were the best way to find out what kinds of components even existed (especially when I was growing up in Hawaii). Digi-Key stopped printing catalogs a few years ago; Newark apparently still does. In any case, these kinds of sources now have good online resources for finding parts, they tend to have a lot of parts in stock, and they are set up for small quantities, which is why they are great resources for individuals, too. Usually, it’s very easy to buy components from these sources, and I rarely interact with anyone when I do since I usually just place the orders through the web sites at their listed prices.
 |
However, the prices usually are not the best at those most convenient sources, especially when my minimum quantities tend to be full reels with thousands of parts rather than a few individual parts. So for most of my electronics purchasing, I go with big distributors like Arrow, Avnet, and Future Electronics. These companies have local offices (though for Las Vegas, “local” tends to mean in Phoenix, Arizona or somewhere in Southern California) that have salespeople that I can talk to that can help me get lower prices. Future Electronics, being a Canadian company, is the exception that I mentioned earlier; but, working with them is basically the same as working with Avnet or Arrow since they have the local staff and things like a distribution center near Memphis, Tennessee (here is a video about it).
Back when I was a student and before I started Pololu, I thought electronics distributors just bought components from manufacturers and then sold them with some markup on their cost. I think some of that did happen and still happens today, but it’s less common and less practical now because there are so many different, specialized components that they cannot all just be sitting in stock somewhere, waiting for the unlikely scenario that someone would come along and buy them. When I buy from distributors like Digi-Key and Mouser, I am almost always buying something they have in stock; when I buy from Arrow and Future, it’s almost never something they have in stock (or it’s something they have in stock because they had good reason to expect me to order).
But there was a much bigger misconception in my naive view than just the timing of when a distributor bought some parts relative to when the end customer ordered them. The major thing I learned in the early years of running Pololu is that component manufacturers charge the distributors different prices for the same components, based on the end customer! In some ways, that’s frustrating because it means I have to do a lot more work to get a good price. I have to convince each distributor and each manufacturer to give me a good price, and sometimes I have to do that with each component. It can also be a good thing in that if I do establish a good relationship with some manufacturer and distributor, the hassle per part goes down over time as they get to know our business and what factors are important to us. And some of them probably do give me a globally competitive price sometimes.
The difficulty, and what prompted me to write this post, is with those manufacturers that do not. (That or counterfeits, which is sometimes the explanation or excuse I get back from manufacturer’s representatives.) Well, the really specific thing that led me to write this post is the AVR Freaks thread about my last post, in which I introduced our new A-Star 328PB Micro:
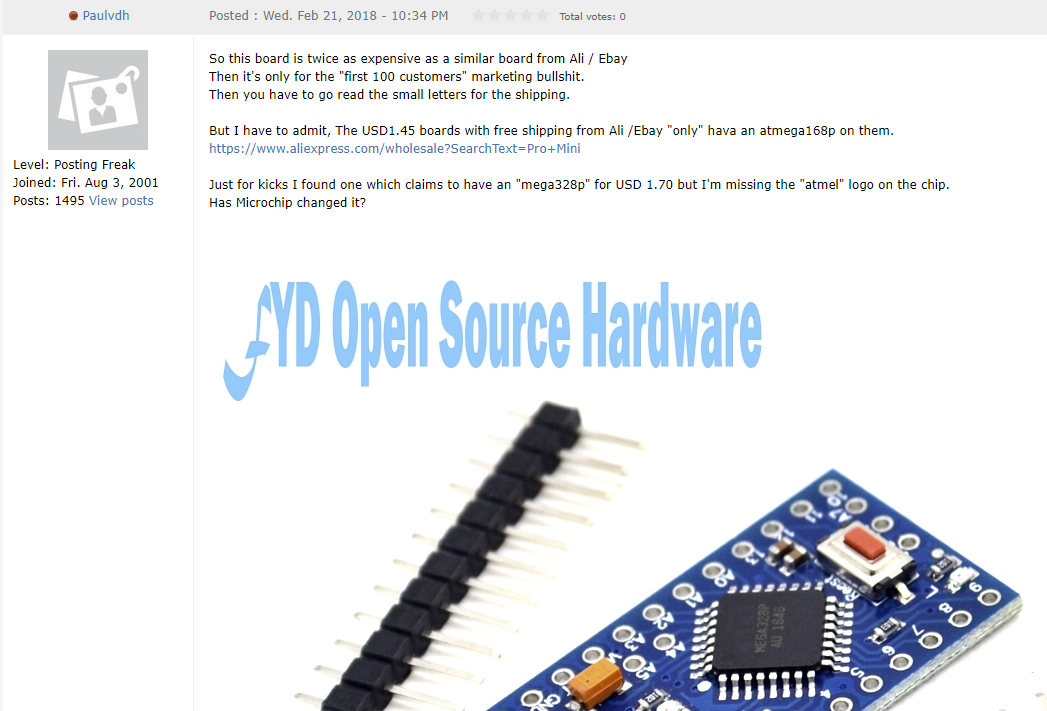 |
AVR Freaks post about A-Star 328PB Micro announcement, the motivation for this blog post. |
|---|
The poster mentions a board similar to Pololu’s with an ATmega328P for $1.70 (and wonders about the chip authenticity). I went to look at the part price on Digi-Key, and this is what I saw:
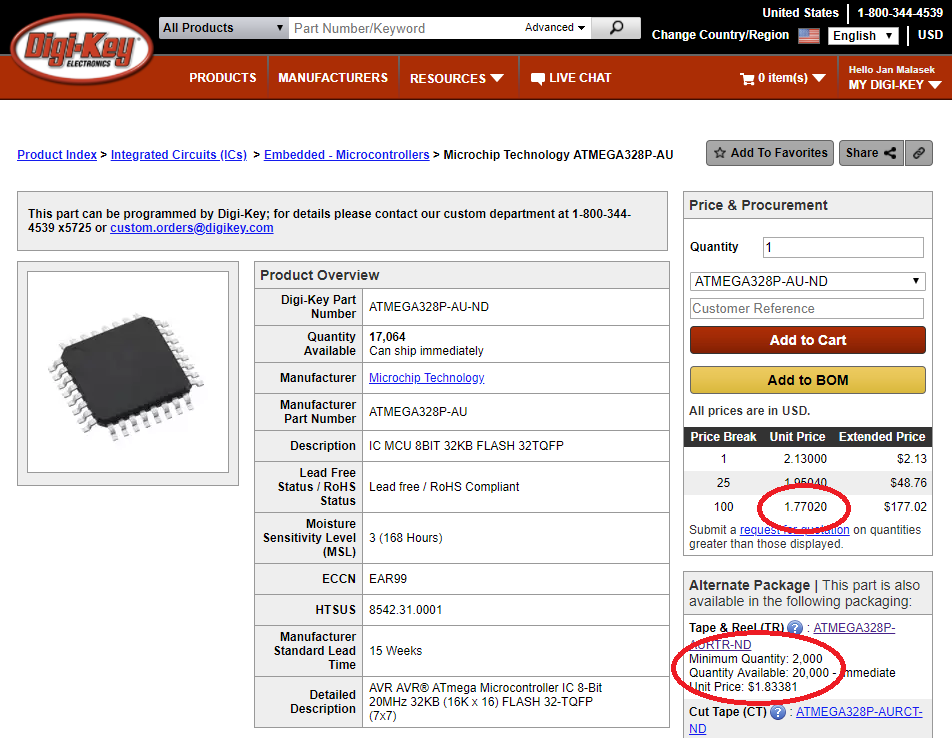 |
Screenshot of Digi-Key price for ATmega328P with prices highlighted, retrieved 25 February 2018. |
|---|
I have highlighted the relevant fields, which are the lowest prices: $1.77 each at 100 pieces, and alternately, on a reel of 2000 pieces for $1.83. 100 pieces is kind of low for a highest price break. A long time ago, I tried out the higher volume quote request option that is suggested under the 100-piece price, and after some back-and-forth, Digi-Key gave me an official volume quote for higher quantities with the exact same price as at the 100-piece break:
 |
Excerpt from quantity price quote from Digi-Key (from around 2010) |
|---|
I tried it a few more times with some other parts, but it was basically the same result every time, so I have not tried special pricing with Digi-Key since. That was close to ten years ago, so maybe it’s different now, and maybe it would be different if I had asked for 10k or 100k pieces.
Back to the original point: you can get the whole assembled board from China, in single-piece quantities, for less than the price of just the one component, even in volume quantities. And this Atmel/Microchip example is far from atypical or anywhere near the worst case. Here is an AliExpress listing for a small development board for the STM32F103C8T6 microcontroller:
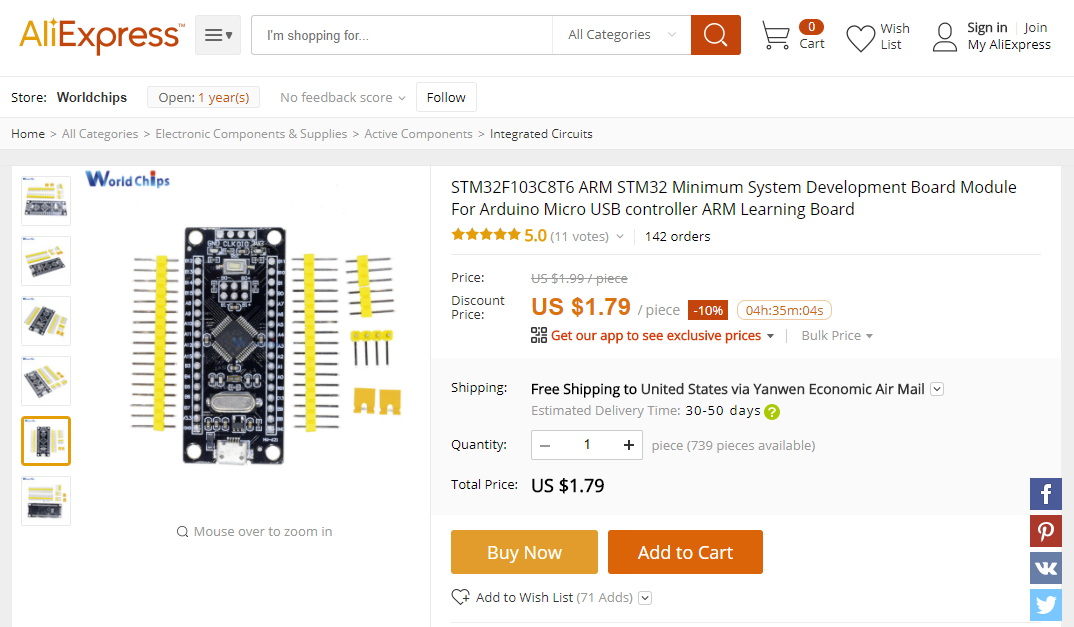 |
AliExpress listing for an STM32F103 development board for $1.79 including shipping, captured 25 February 2018. |
|---|
In this case, Digi-Key has prices listed for higher quantities than in the earlier example, and the 2400-piece reel has the best unit price of $3.04:
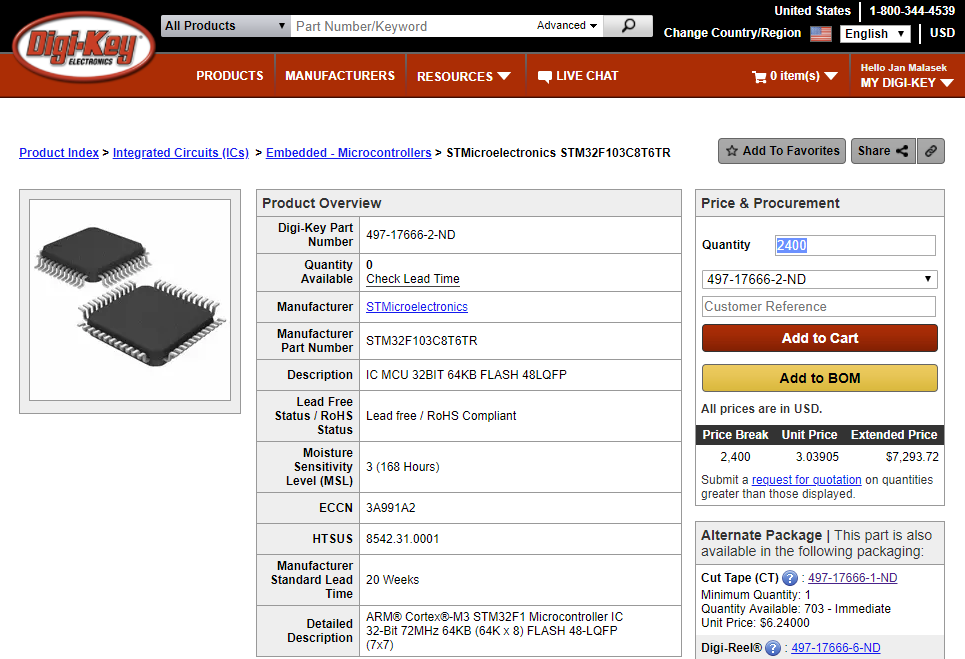 |
Screenshot of Digi-Key price for STM32F103C8T6, retrieved 25 February 2018. |
|---|
I have been working on pricing for similar STM32 parts, and even at twenty thousand pieces (not through Digi-Key), they are not getting to the prices of just one of these complete boards, with double-sided assembly and a bunch of additional components (and free shipping!—though that is some separate scam that I do not blame the electronics component manufacturers and distributors for). Something clearly doesn’t add up, right?
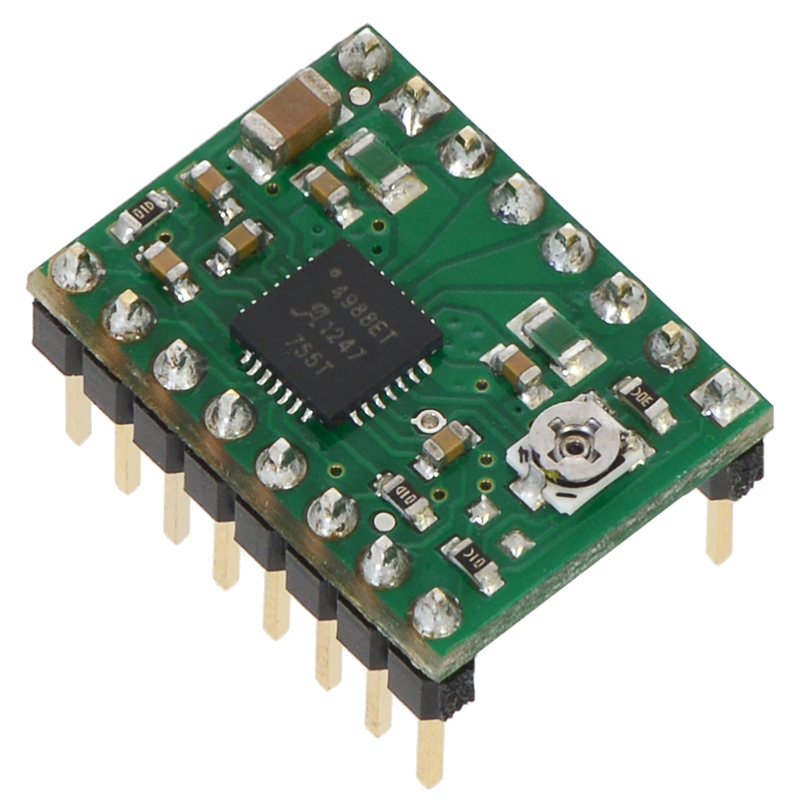 |
As I mentioned earlier, some manufacturers will say the parts in the cheap boards from China are counterfeits. I believe that is the explanation in some cases, and we have our share of frustrations with knock-offs and counterfeits of our own products. But I had one experience around five years ago that makes me very skeptical that that is anywhere near the whole story. One of our more successful early products, at least by number of units sold, was a basic carrier for Allegro’s A4988 stepper motor driver. I remember being frustrated because Allegro seemed to have some deal in place with Digi-Key that gave them the best prices (and unlike the examples above, Digi-Key did have volume breaks up to many tens of thousands on that part). Digi-Key has been getting better on prices, but still, paying “Digi-Key prices” seemed like an insult when I was buying tens of thousands of these parts at a time.
It became more of a problem when the knock-offs of our boards started appearing on eBay and other sites for basically the same prices as just our component costs. I kept trying to get my suppliers to help me with my prices until I got the parts from Asia via Future Electronics. They assured me these were genuine parts through their global partners or subsidiaries, and they could do that for me because they were not authorized distributors for Allegro in the United States. So, that alone was a good indication that these parts were out there, through reputable sources, at lower prices than I could get in the US. But the conclusion to this story gets better: someone who could do something about it at Allegro finally got word that I was getting these parts elsewhere (they noticed the sales abruptly went away, and they wanted to see my invoices from other vendors) and reduced my authorized price, through Arrow, to almost half of what it had been.
This was over the course of maybe two years, and while it did help and we lowered our prices, I believe we missed out on a lot of potential sales because it took so long to get the prices down. The sad thing is that there are probably many more missed opportunities, not even just for Pololu, because of how components get priced in the US. The manufacturers seem more willing to cut prices after demand is proven and they start losing sales rather than up front to make the sales happen in the first place. And to be clear, I am not talking about small quantities like broken reels and cut tape that require extra handling and processing. I also understand that these modern 32-bit microcontrollers like the STM32 are such amazing achievements that it seems really unappreciative to complain about one costing $2. It’s just that when the same parts are costing one dollar somewhere else, we need to figure out how to get that price if we want to be globally competitive with our products.
Since I know many of you are also interested in open-source hardware, I should mention the ramifications component pricing has for openness with our designs. One of the factors that goes into how much information we release is how good I think our component price is. It’s easier to share key components that we use if I think we can keep making our products competitively.
Back to some of the comments that led me to start writing on this topic. I hope I have shown you a different kind of behind-the-scenes view than just the machines that go into making our products. Some of that “twice as expensive as a similar board from Ali / Ebay” goes all the way down to the basic component level. I hope you can see that I am working on addressing that. I would be interested in what other small manufacturers in America (and in other countries besides China) do. Should I just start sourcing more components from China? Should I be using smaller distributors in the US? (I am skeptical that would make a big difference because of my understanding that manufacturers are basically setting the prices). Or is there something else I’m completely missing? I know some of you who read my posts work for the electronics manufacturers and distributors; can you help push for getting better component pricing in the US? For all of you who like making electronics, wouldn’t it be nice to have the option (or for your kids to have the option) to do that without having to live in China or being limited to industries like aerospace and military where components costs might not matter as much?
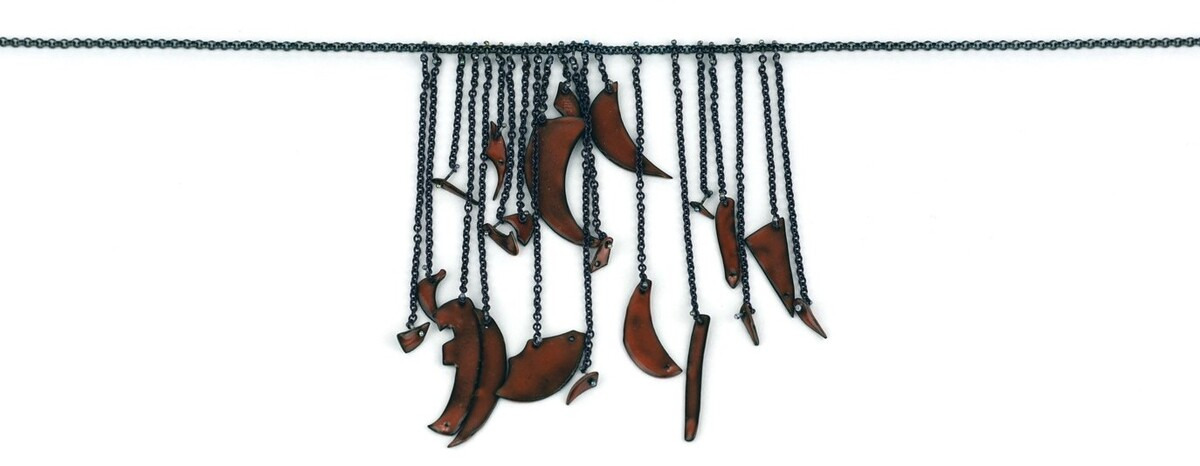
Laser-cut jewelry by Melissa Cameron
Laser cutting is an excellent way to make intricate parts for jewelry or decorations. These fantastic jewelry art pieces were designed by Melissa Cameron, an Australian-born artist based in Seattle, WA, who has work displayed in the collections of multiple art galleries, including the National Gallery of Australia. These pieces were cut from birch plywood and stainless steel using our laser cutting service. To get started on your own laser cutting project, submit a quote request here!
|
|
||
|
|||


|
|
|
|||
|
|
|






Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










