Pololu Blog »
Pololu Blog (Page 26)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Pololu and LVBots CES Open House 2018
 |
Are you attending CES or in Las Vegas on Wednesday, January 10th? You can join Pololu and LVBots any time from 5 p.m. to 8 p.m. for CES Open House 2018! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide food. Registration and other details are on the LVBots Meetup page.
(A Little More Than) Twelve Days of Christmas Sale

If you missed our Black Friday sale or realize you didn’t quite get everything you wanted, don’t fret: we have all active Pololu-brand and PCX products on sale for 12% off, and we are offering 20% off twelve broad categories of our products. The sale runs through noon PST on Friday, December 22, but be careful to order early for delivery before Christmas. Save on your Christmas shopping, or stock up now on robot parts for the new year. Check out the sale page for all the discounts and coupon codes. Merry Christmas!
New adjustable voltage regulators with multi-turn fine adjustment
 |
 |
I am excited to announce our first voltage regulators with multi-turn trimmer potentiometers! I have wanted to add multi-turn pots to our products for a long time, but the problem has been that they are really expensive. They also tend to be quite big, at least compared to many of our boards, which we try to keep compact, and the smaller, surface-mounted ones are especially expensive. My latest round of looking for lower-cost options did not pan out, but I decided to just give it a try with the expensive parts.
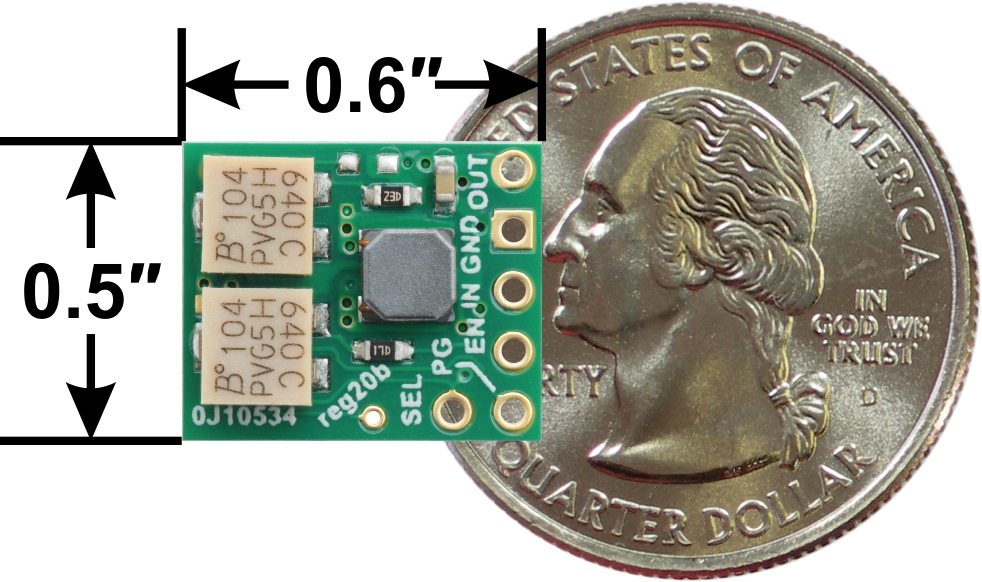
The new S9V11x regulators that feature these potentiometers are buck-boost regulators that can output a voltage that is lower, the same, or higher than the input voltage. There are also versions with a multi-turn pot for adjusting the undervoltage cutoff threshold, so that if you use these with batteries, you can prevent overdischarging them. With twelve turns of adjustment available, it’s much easier to precisely set the voltages on the modules than with the single-turn potentiometers we have used on other adjustable regulators.
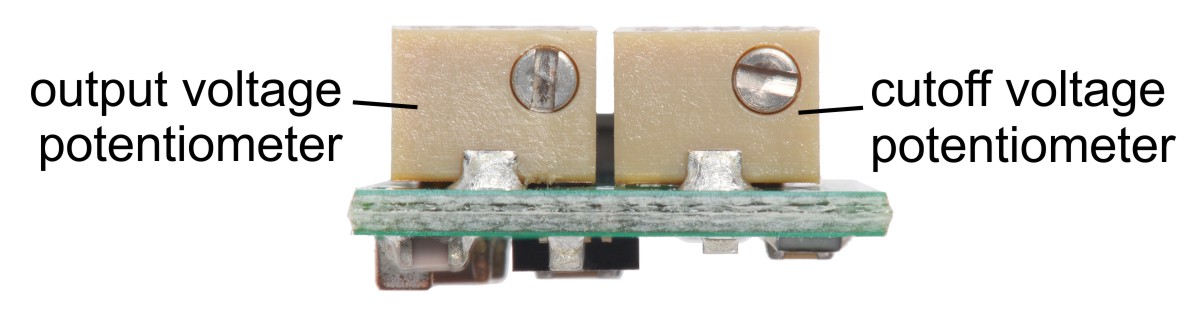 |
The output and cutoff multi-turn adjustment potentiometers on the S9V11x voltage regulators. |
|---|
While I have been talking mostly about the potentiometers, the main regulator is pretty magical, too, giving you quite a bit of power over a broad operating input range in a small size.
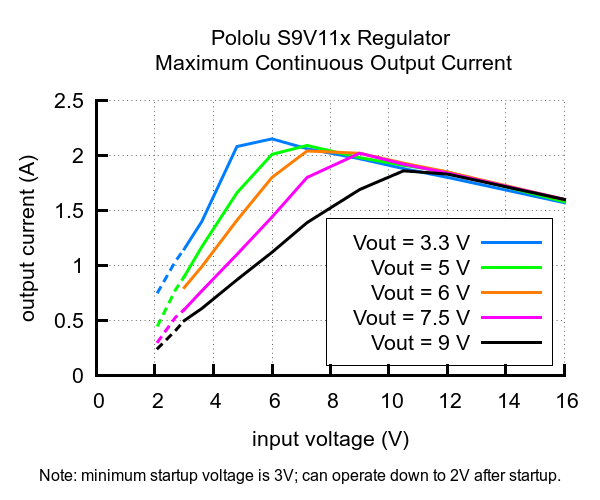 |
Typical maximum continuous output current of Step-Up/Step-Down Voltage Regulator S9V11x |
|---|
Our stock products are available in several combinations of adjustable and fixed output voltage and cutoff. If you have a higher-volume application, we can make them with fixed voltages wherever you need them. You could initially prototype your design with the adjustable version and then get fixed ones made once you know exactly what voltage you need.
| Regulator | Input (V) | Output (V) | Low-voltage cutoff | Size | Price | |
|---|---|---|---|---|---|---|
 |
#2868 S9V11MACMA | 2* – 16 | 2.5 – 9 (fine-adjust) | fine-adjust | 0.50″ × 0.60″ × 0.25″ | $13.95 |
 |
#2869 S9V11MA | 2.5 – 9 (fine-adjust) | – | $10.95 | ||
 |
#2870 S9V11F5S6CMA | 5 (6 V selectable) | fine-adjust | $10.95 | ||
| #2871 S9V11F3S5CMA | 3.3 (5 V selectable) | fine-adjust | $10.95 | |||
 |
#2872 S9V11F3S5 | 3.3 (5 V selectable) | – | 0.50″ × 0.60″ × 0.17″ | $7.95 | |
| #2873 S9V11F3S5C3 | 3.3 (5 V selectable) | 3 V (fixed) | $7.95 | |||
 |
#2836 S9V11F5 | 5 | – | 0.30″ × 0.45″ × 0.17″ | $8.95 | |
| * The regulator has a minimum start-up voltage of 3 V, but it can operate down to 2 V after startup. It is disabled when the input voltage is below the low-voltage cutoff. | ||||||
I am very interested to see what people think of the multi-turn adjustment feature. If these new regulators sell decently or customers ask for it, we will add the multi-turn potentiometers to our other regulator offerings. Is the extra expense worth it? Or do you know of a good, low-cost, multi-turn potentiometer we could consider for future products like this?
Related products







Our 20D gearmotors with long-life carbon brushes are now available with extended motor shafts
|
|
|
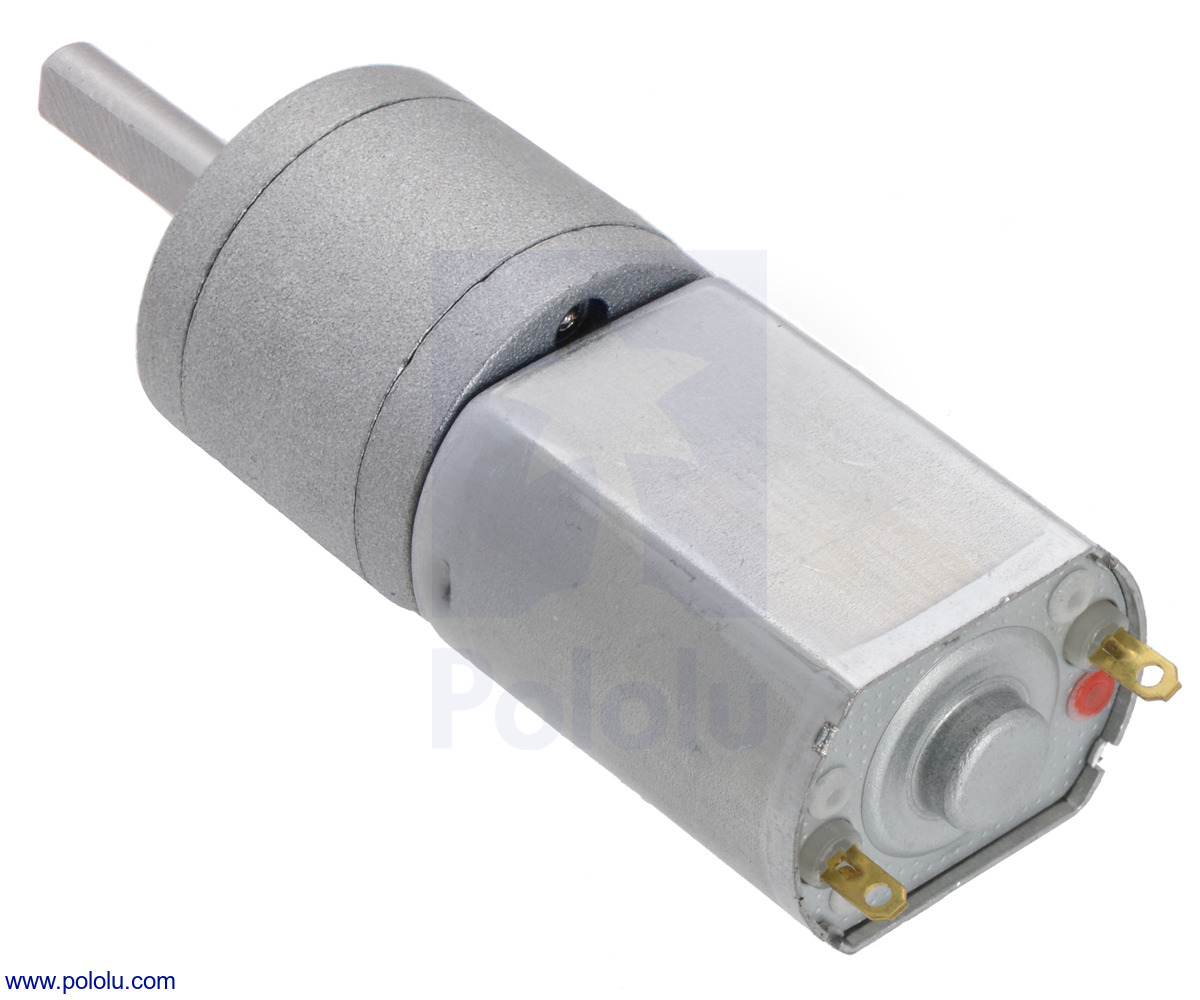

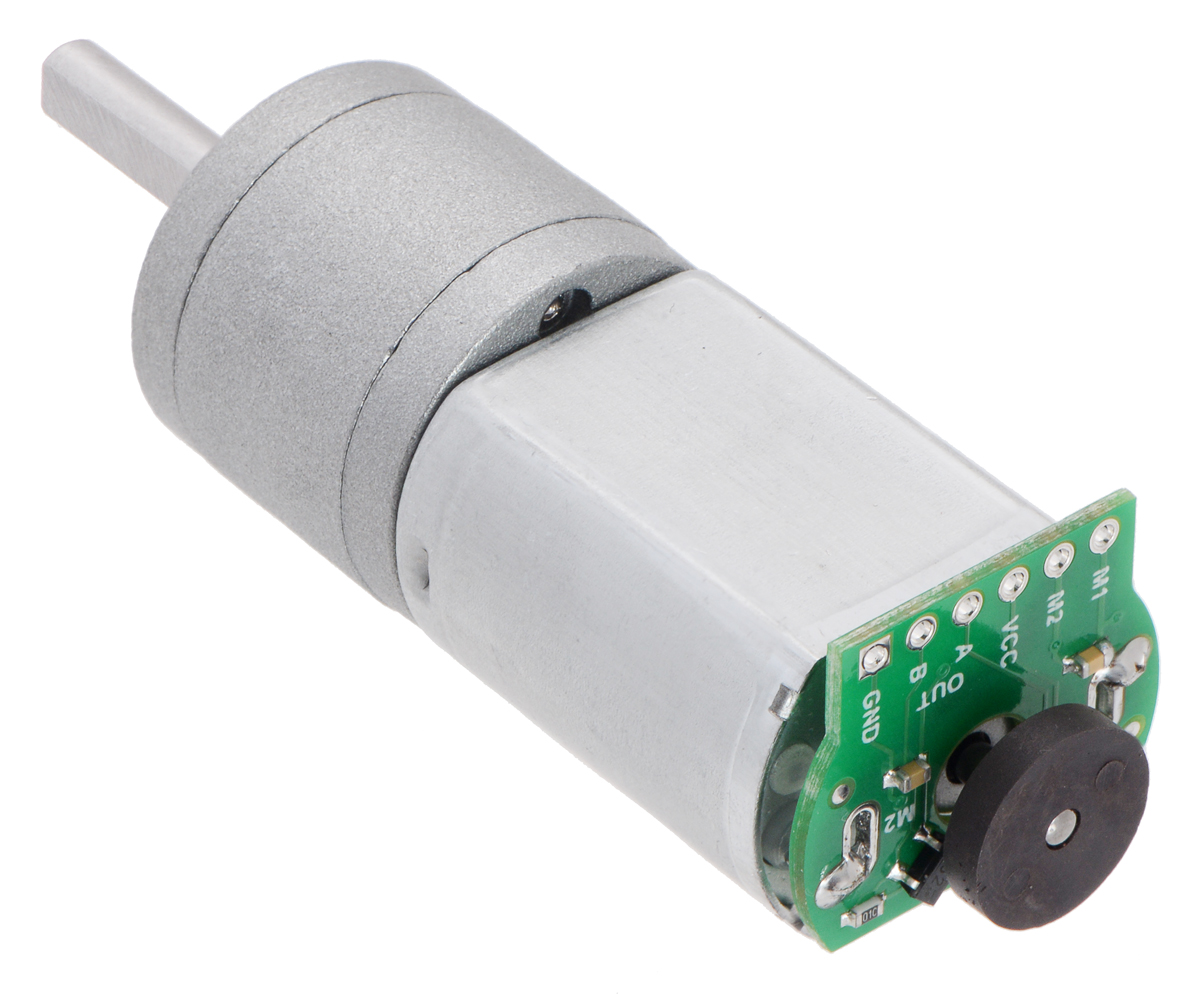
Last month when we introduced versions of our 20D gearmotors with long-life carbon brushes, we mentioned units with extended motor shafts were in the works. Well, I’m happy to announce that option is now available for both the 12V CB and 6V CB 20D gearmotors, making it possible to use them with encoders like our magnetic encoder kit. The following table shows our full selection of 20D gearmotors, which has now grown to 72 options:


Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. In order to avoid damaging the gearbox, we recommend keeping continuously applied loads under 50 oz-in (3.5 kg*cm) for the versions with precious metal brushes and under 70 oz-in (5 kg-cm) for the versions with carbon brushes (the ones with “CB” in the name). Stalls can also result in rapid (potentially on the order of a second) thermal damage to the motor windings and brushes, especially for motors like this that can deliver a lot of power for their size; a general recommendation for brushed DC motors is to limit continuous current to approximately 25% of the stall current.

Cyber Monday doorbusters and deals revealed!
 |
Tomorrow is Cyber Monday and the final day of our sale; you can check out the Monday deals on our sale page now. The weekend deals are still active until midnight Pacific, so this is your chance to pick out what you want from those and what you want to get on Monday!
 |
Black Friday deals keep coming from Pololu and from Adafruit

 |
Our Black Friday/Cyber Monday Sale is nearing the halfway point; thank you to all of those who have already ordered! Today’s doorbusters are gone, but the rest of the daily specials are still active, and a lot more great deals are still coming your way, including the weekend deals we just released. We’re not doing any doorbusters Saturday and Sunday, just lots of extra discounts on big categories, so take your time looking around.
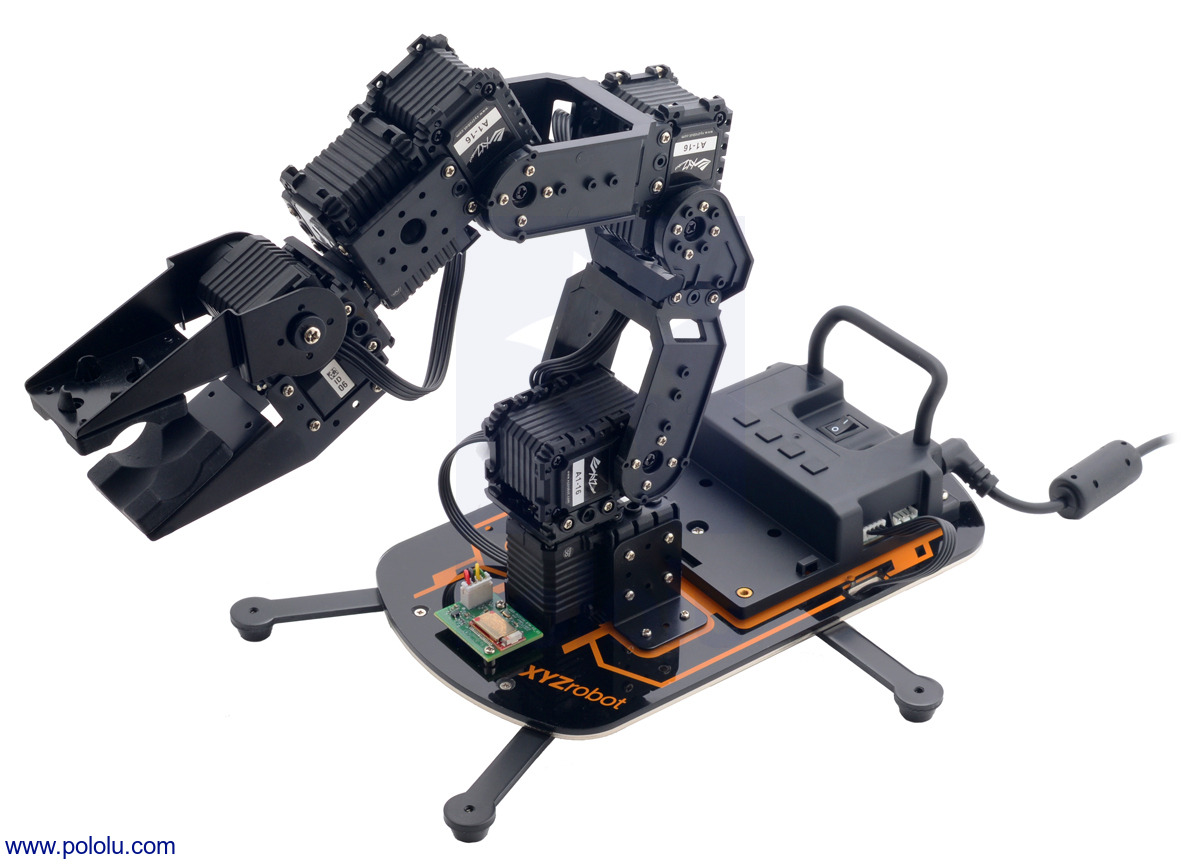
The weekend deals include two items we have never had on sale before: smart servos from XYZrobot and a 6DOF robot arm based on those servos. We recently released an Arduino library for the A1-16 smart servos and arm, making them especially easy to expand beyond their preconfigured sequences for use in your own advanced projects.
 |
 |
Our doorbusters will return starting at 6 AM on Cyber Monday, and rumor has it that might be a prime opportunity to snag one or two of our new Balboa balancing robots!
By the way, our friends at Adafruit are having their own Black Friday sale this weekend, with 15% off their entire catalog and 20% off their Feathers and accessories, plus free items for orders over certain amounts. You can find all the details on the Adafruit blog.

Friday deals - Romi, motor drivers, and more
 |
Twelve hours until the Black Friday doorbusters start!
You can check out Friday’s deals and doorbusters flyer on our sale page now; complete details will be available later tonight.
Happy Thanksgiving and Thursday deals revealed!
 |
Thursday’s deals and doorbusters are now shown on our Black Friday sale page. It’s going to be a Zumo-themed day, with a big sale on the Zumo robots and kits as well as the motors you need to build them. Or you can take advantage of Thursday’s discounts on microcontroller and motor controller boards to build your own sumo bot! Like Wednesday, Thursday’s doorbusters start at 6:00 AM Pacific, and there will be many more deals available all day, including site-wide discounts and free items.
Please note that we will be closed Thursday, and have a happy Thanksgiving!
Thanksgiving and preview of our upcoming Black Friday/Cyber Monday sale!
 |
Some of my happiest memories of building Pololu, and therefore of my life, are of my friends Ben and Paul moving to Las Vegas to work on it with me. Ben was my best friend in high school, but we had not stayed in touch well after that. I met Paul at MIT, and he was involved with Pololu from the beginning, in 2000, and after he graduated, he visited Candice and me in Massachusetts and then in Las Vegas from time to time. Ben and I reconnected in late 2006, and he moved to Las Vegas shortly thereafter; Paul finally joined us (with his wife Fang) full time after the summer of 2007.
So we have been at this as a team for over ten years now. It’s long enough that it’s difficult to remember things being different. As I started writing this, I figured that our first Black Friday sale must have been in 2007, too. But apparently we did not have our first one until 2009 (though Ben pointed out, with a hint of resentment, that he might have been pushing for it sooner). I have happy memories of last-minute sale preparations and then staying up past midnight to watch the sales come in, wondering how long the doorbuster deals would last. Some years we were at home, instant-messaging each other; other years, we were at the office making sure everything worked as expected.
Even now, our Black Friday/Cyber Monday sale is probably the project Paul, Ben, and I work on together most intensely. There are of course others involved in getting ready for the sale, and there are lots of other projects the three of us all work on. But there’s a really hard deadline, which we typically do not have to deal with, which leads to late nights together. And preparing for the sale involves deciding which products we care about a lot and that we want to highlight, and since it’s our company, it’s our call on how much we want to push by offering products at or sometimes below cost, in the spirit of not only merchandising but also good fun. It’s a time to look back on the products we have released this year, and, as I am doing now, reminisce about Black Friday sales past.
 |
(We do not recommend actually running a Balboa in the snow.) |
|---|
I am giving this background not only to share some of what I am thankful for, but to give our customers and newer employees some understanding of our perspective and what goes into these sales. It’s personal. It’s something fun for me, a kind of reversal of the excitement of looking for good deals as a shopper on Black Friday. When I used to be more directly involved in getting things made and shipped, I would usually go to stores in the evening, to see what deals might be left that other shoppers weren’t interested in. In the past few years, I’ve had the luxury of doing some brick and mortar Black Friday shopping in the morning, though usually I’m still shopping for things like vacuum cleaners for Pololu at stores like Home Depot.
We listen to what our customers say, and we try to put something in our deals for everyone. Of course, part of the point is to offer some extreme discounts, so we limit the quantities and the durations on those deals. But we still try to set the limits such that the doorbusters will last at least a few hours, so if you care and try a little, they should be available. If you’re one of those people who don’t like waking up early or sorting through special offers, I remind you that we work hard to offer good prices to begin with, and we are offering discounts site wide for the duration of the sale. And if you are a student or parent who really had your heart set on a Zumo or Balboa robot for Christmas but miss out on the doorbuster for some reason, and that extra discount makes the difference in being able to afford it, let us know. We want deserving people to have these robots, and we’ll try to help you out.
Now, on to details about the sale this year, since we will be making some big changes from years past. In a break from past years, when we had a single set of doorbuster coupons that went active on the first day of the sale and the same items were on sale for the duration of the sale (Wednesday before Thanksgiving through Cyber Monday), we will have different door busters for different days. We have also upgraded our coupon system so that we can control the time they are active, not just the day, so that we can make doorbusters go active at a time more appropriate for our customers in the United States.
Our new free shipping system should allow many of the sale items to ship for free or at a low cost, which should make it practical to make several orders over the course of the sale. We might combine some orders into single shipments to reduce our shipping expenses, but please note that because of the volume of orders we get during the sale, we will not be able to accommodate requests to combine orders to reduce shipping charges.
I hope you get to spend the holidays doing things that bring meaning to your life, with the people you love.
Oh, and if you were expecting to see a preview of the sale, it’s up on the Black Friday/Cyber Monday sale page now. Keep checking back throughout next week as we reveal more great deals!
Now for Raspberry Pi too: Dual G2 High-Power Motor Drivers
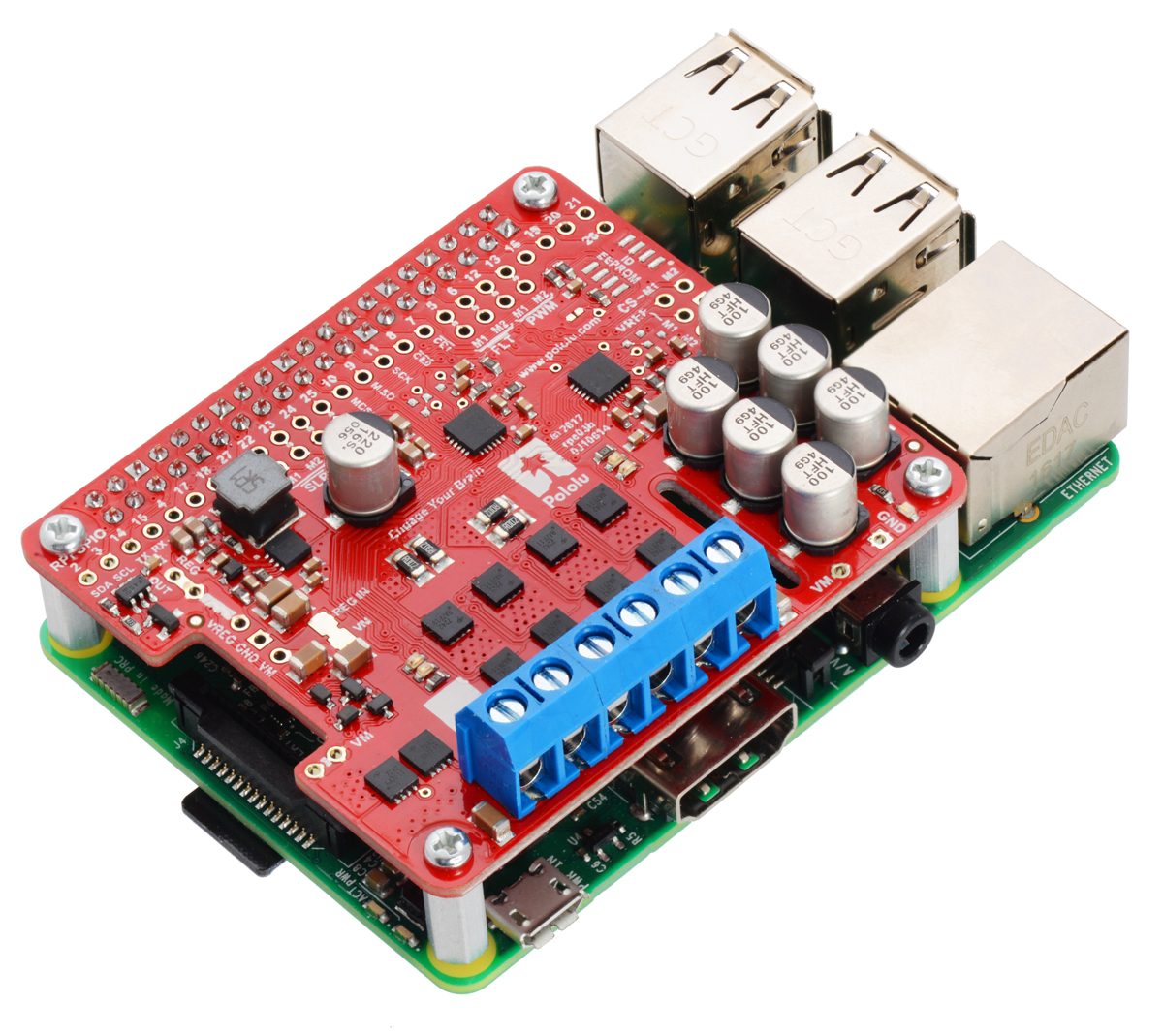 |
As Jan promised yesterday, our new dual motor drivers are now also available as Raspberry Pi expansion boards! The Dual G2 High-Power Motor Drivers for Raspberry Pi feature two discrete MOSFET H-bridges on a board designed to plug directly into a Raspberry Pi (Model B+ or newer), and they also include an integrated 5 V, 2.5 A switching step-down regulator that allows a single power supply to power both the motors and the Raspberry Pi. We provide a Python library for Raspberry Pi to make it easy to get started using the drivers.
|
|
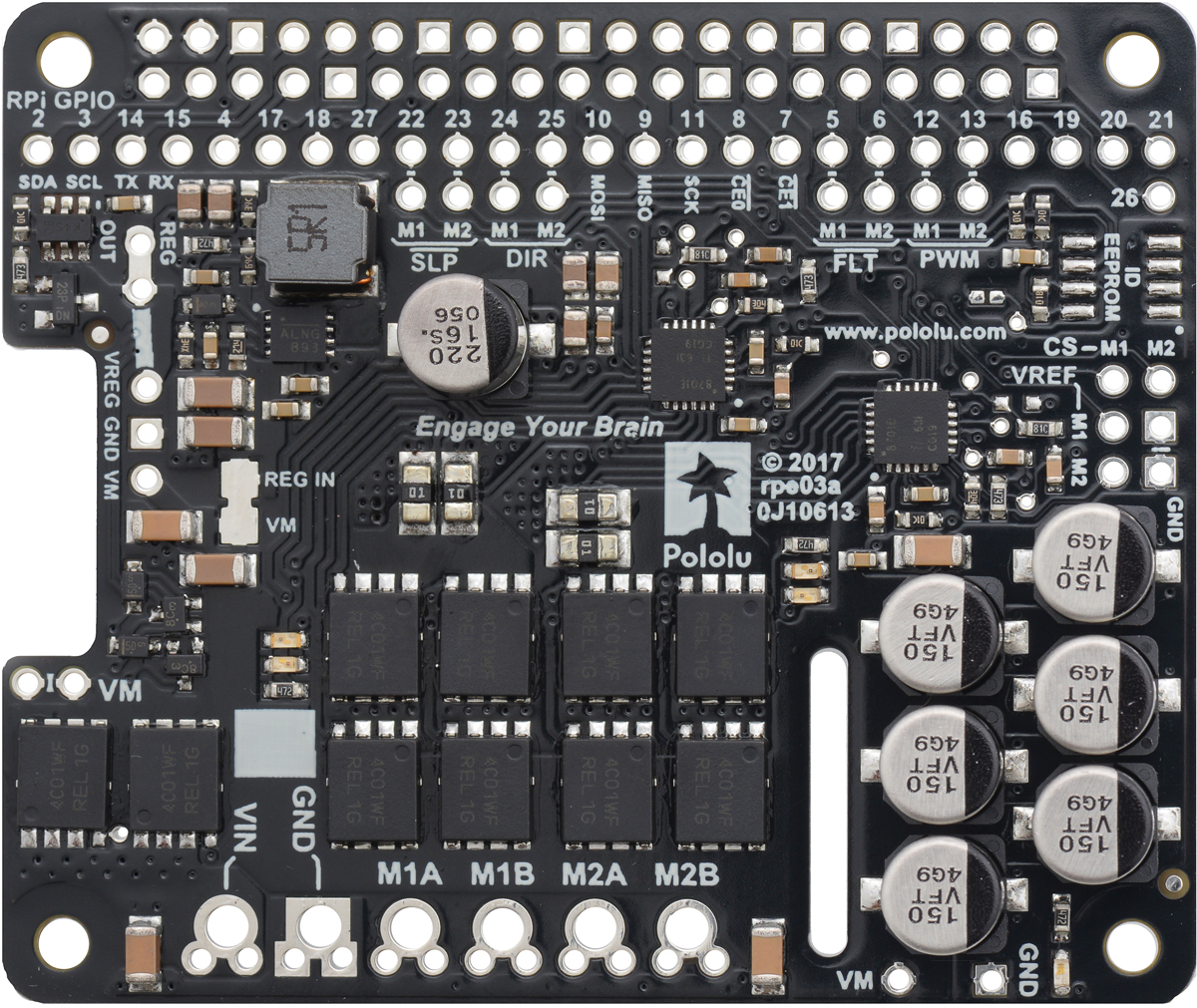
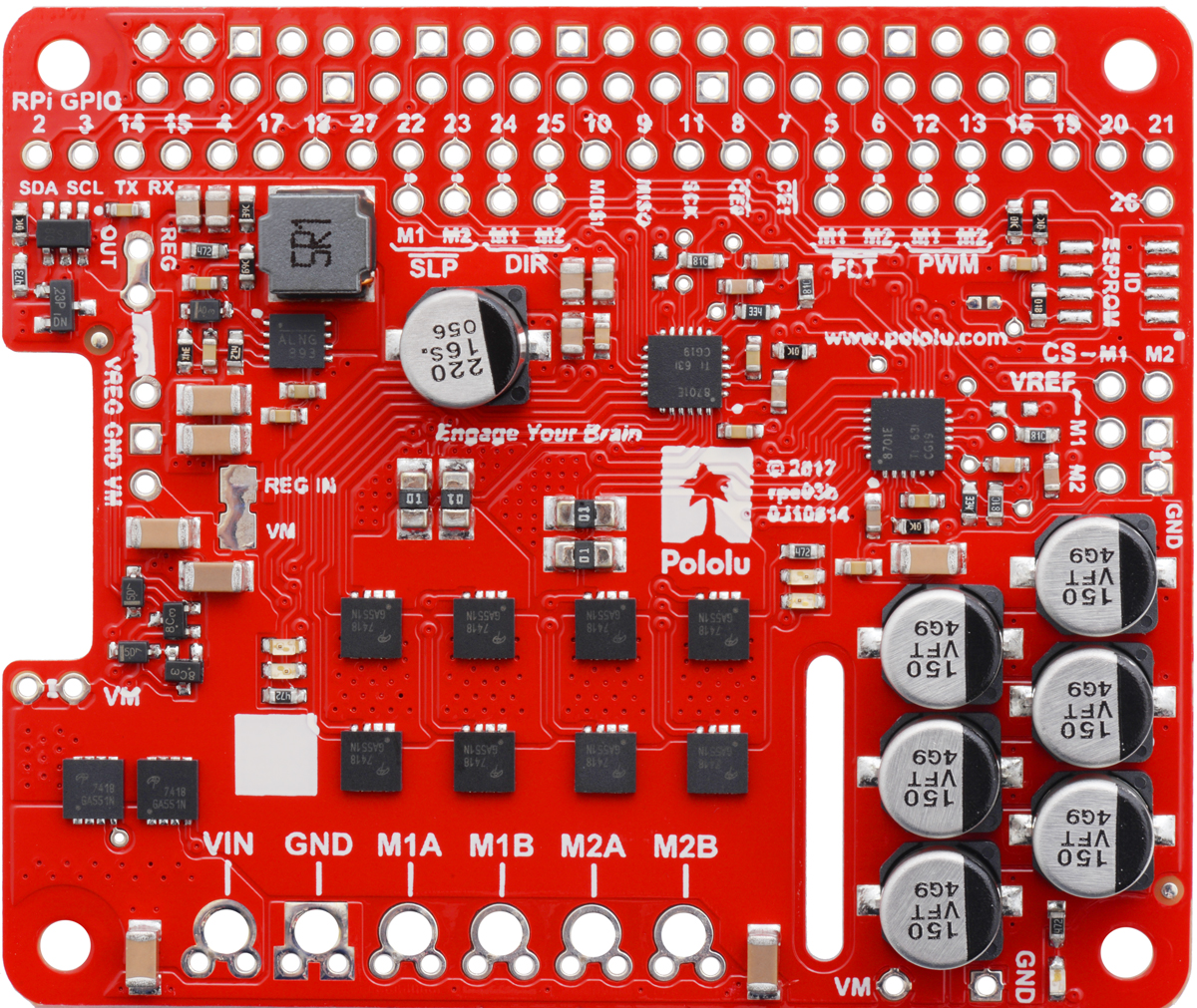
As with the Arduino shield (or standalone) versions, two different PCBs are used for these drivers: the black board has 5×6 mm MOSFETs and the red board has 3×3 mm MOSFETs. Again, each board is available with 30 V or 40 V MOSFETs for a total of four options:
 Dual G2 High- Power Motor Driver 18v22 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 18v18 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 24v18 for Raspberry Pi |
 Dual G2 High- Power Motor Driver 24v14 for Raspberry Pi |
|
|---|---|---|---|---|
| Absolute max input voltage: |
30 V | 36 V* | ||
| Max nominal battery voltage: |
18 V | 28 V | ||
| Max continuous current per channel: |
22 A | 18 A | 18 A | 14 A |
| Default active current- limiting threshold: |
60 A | 50 A | 40 A | |
| Available with connectors installed? |
No | Yes | No | Yes |
* 40 V if regulator is disconnected
Unlike the Arduino, the Raspberry Pi does not have analog inputs, so there isn’t an easy way to do current sensing with these boards. However, the current sensing pins are exposed for advanced users who might want to add an external ADC or otherwise make use of the current sense feedback.
Until now, our motor driver offerings for the Raspberry Pi have been limited to our dual MC33926 and DRV8835 add-on boards, which handle much less current. One of our other favorite integrated motor drivers, the VNH5019, would have been a nice step up in power from the MC33926, but it has one big downside…literally. Its footprint measures around 17 mm by 19 mm, and you can see that on our dual VNH5019 Arduino shield, the two driver ICs take up most of the width of the board:
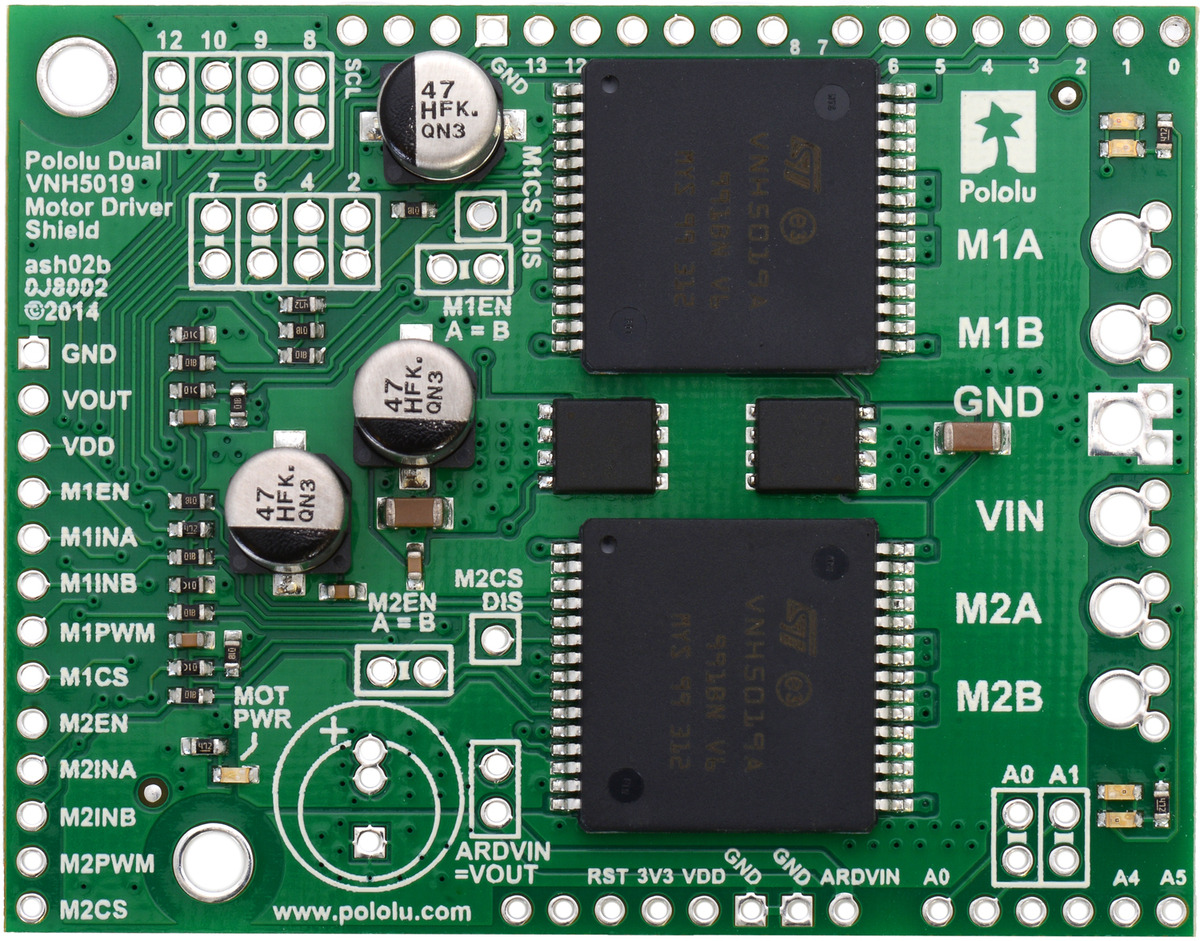 |
Pololu dual VNH5019 motor driver shield for Arduino. |
|---|
We try to make our Raspberry Pi expansion boards conform to the HAT (Hardware Attached on Top) mechanical specification when we can, and that spec recommends including a slot in the middle of the board to accommodate a flex cable plugging into the Raspberry Pi’s camera connector.
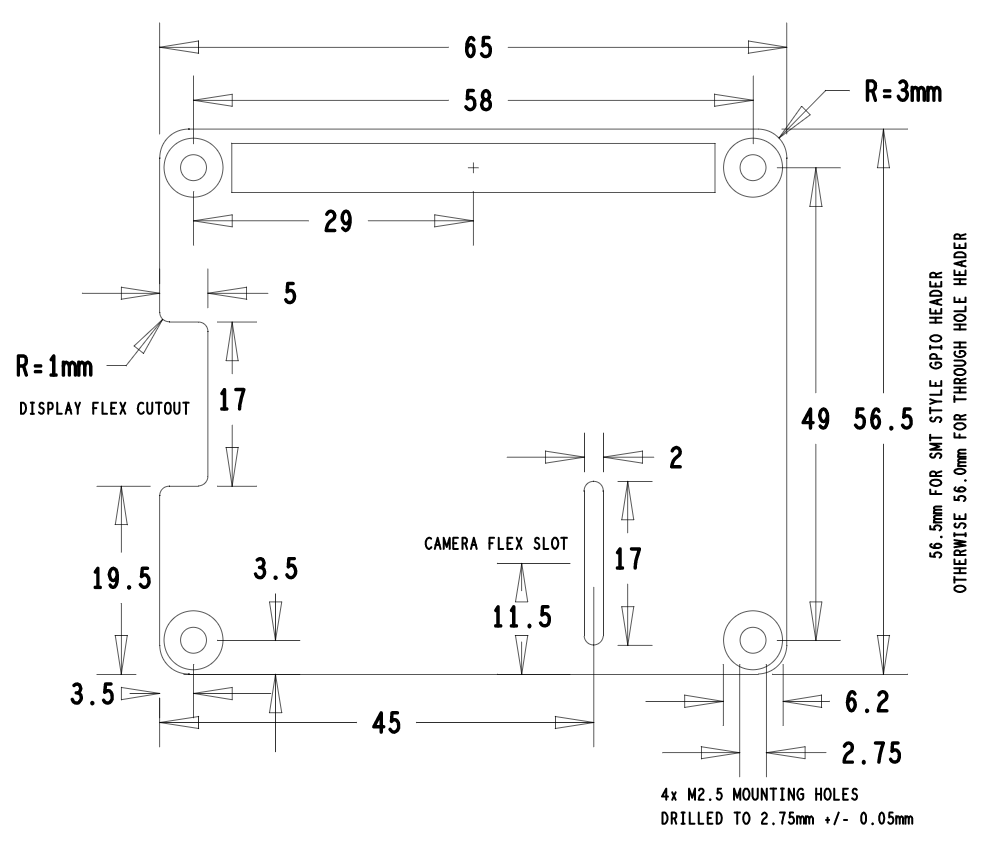 |
Raspberry Pi HAT mechanical specification drawing. |
|---|
Combined with the cutout for the other flex connector, this space limitation means that it would be difficult—if not impossible—to make a VNH5019 motor driver expansion board for the Raspberry Pi that is not annoyingly obstructive. So we are excited that the G2 design, with its discrete MOSFET H-bridges, provided enough layout flexibility for us to create these high-power dual motor driver expansions without making such compromises. We hope that they will open up new possibilities for bigger and more powerful Raspberry Pi robots!
 |
Related products








Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










