Pololu Blog »
Pololu Blog (Page 29)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New SK9822 LED strips and panels
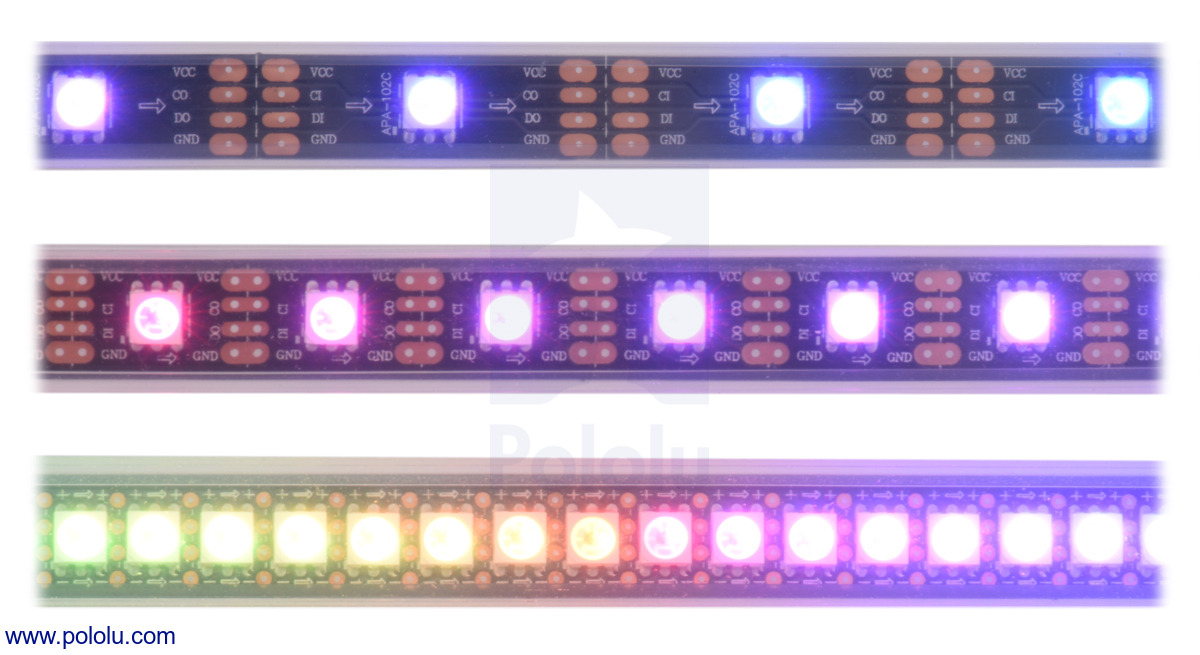 |
We’re excited to offer a series of addressable LED strips and addressable LED panels based on the new SK9822 integrated circuit. Like the APA102C, the SK9822 combines an RGB LED and driver into a single 5050-size package, allowing each pixel to be individually controlled using a simple two-wire SPI protocol.
The SK9822 is almost (see the notes below) a drop-in replacement for the APA102C and is better than it in a few ways, most importantly its built-in constant current control. If you’ve ever tried to power a long chain of LED strips and only connected power at one end, you might have noticed that the far end of the LED strip has a lower voltage across its power rails because of resistance in the long power connections. For LED strips based on the APA102C and WS2812B, the lower voltage makes the light dimmer and redder. With the SK9822, voltage drops like that are less likely to have a visible effect as long as the voltage stays above 3.5 V.
The SK9822’s protocol is very similar to that of the APA102C, but it updates the color that is being shown at a different time. If you replace APA102C LEDs with SK9822 LEDs in a low frame-rate application, you might have to update the code you are using to control the LEDs. The latest version of our APA102 Arduino library works with the SK9822 so you can either use it directly or use it as a reference when writing your own code. The colors generated by the SK9822 look different from the colors generated by the APA102C, so we would not recommend mixing the APA102C and the SK9822 in a single project.
We offer six different kinds of SK9822 LED strip with different LED densities and lengths:
- 1 meter, 30 LEDs (30 LEDs/m)
- 2 meters, 60 LEDs (30 LEDs/m)
- 5 meters, 150 LEDs (30 LEDs/m)
- 1 meter, 60 LEDs (60 LEDs/m)
- 2 meters, 120 LEDs (60 LEDs/m)
- 0.5 meters, 72 LEDs (144 LEDs/m)
We offer SK9822 LED panels in three different sizes:
These new SK9822-based products will replace our older APA102C-based products.
We continue to offer SK6812-based LED strips which also have constant current control but are controlled with a one-wire protocol.
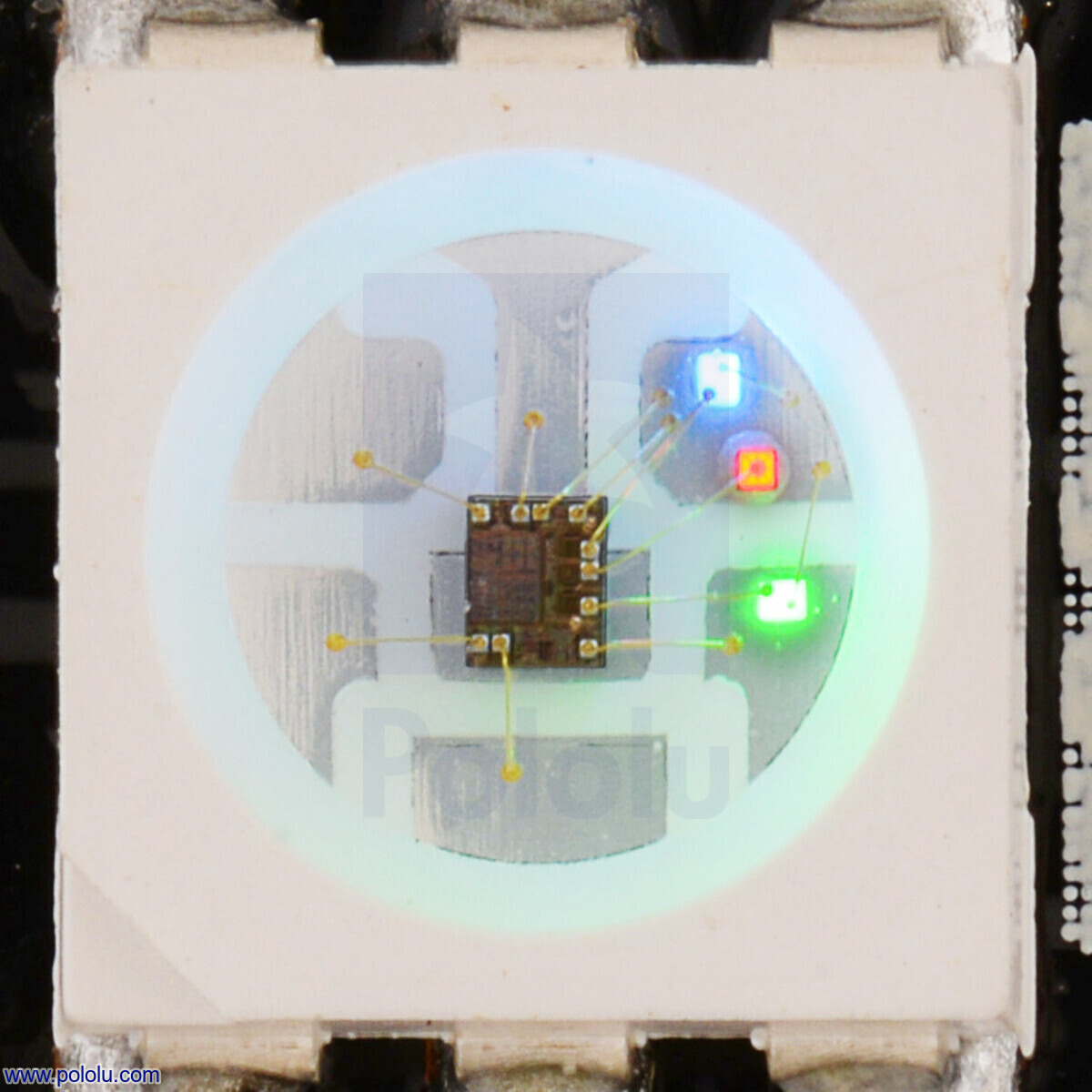 |
Close up of an SK9822, with the red, green, and blue LEDs on at a low brightness. |
|---|
 |
An addressable RGB LED strip (APA102C or SK9822) displaying a rainbow animation. |
|---|
Related products









Sanyo pancake stepper motors with encoders
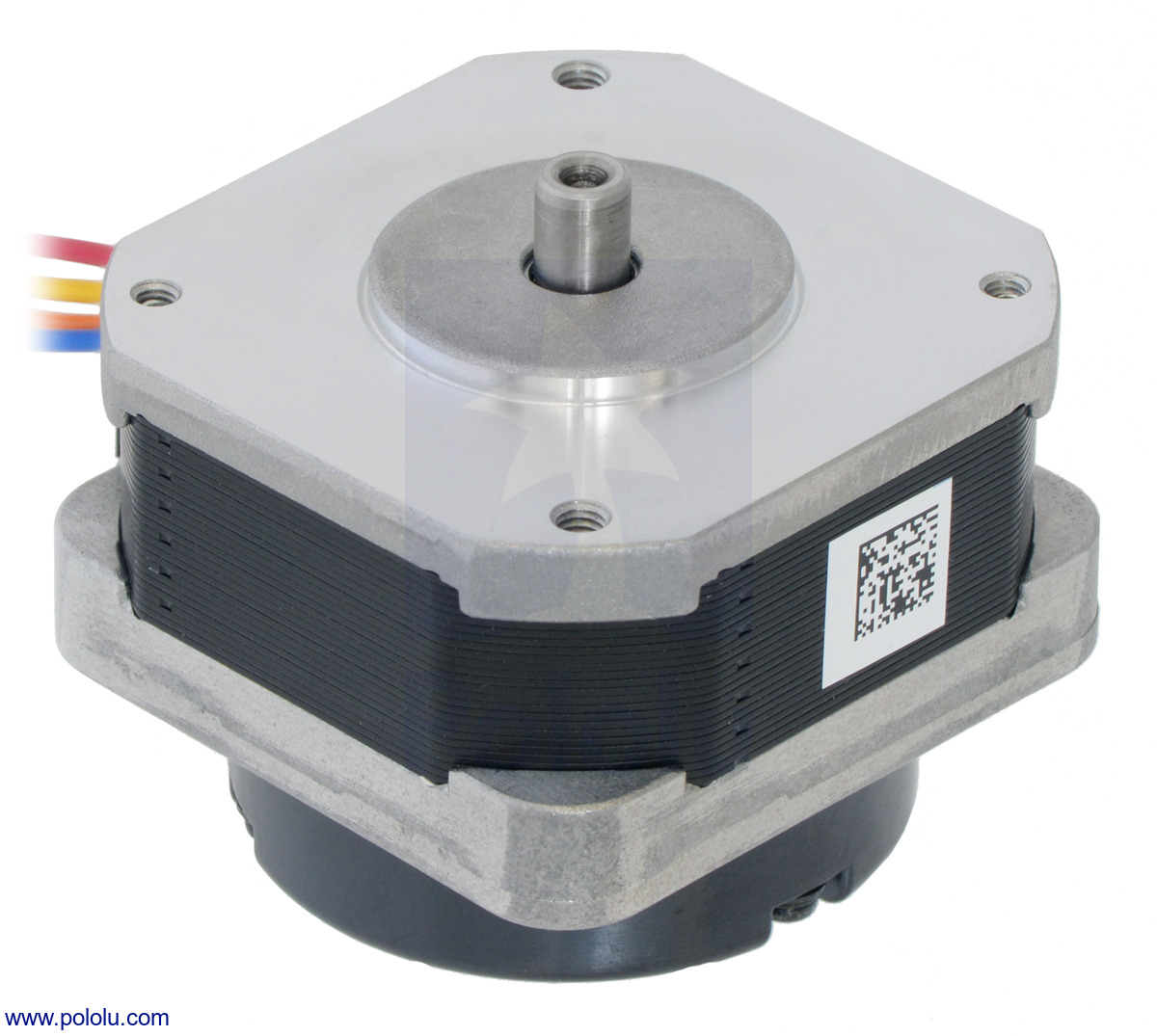 |
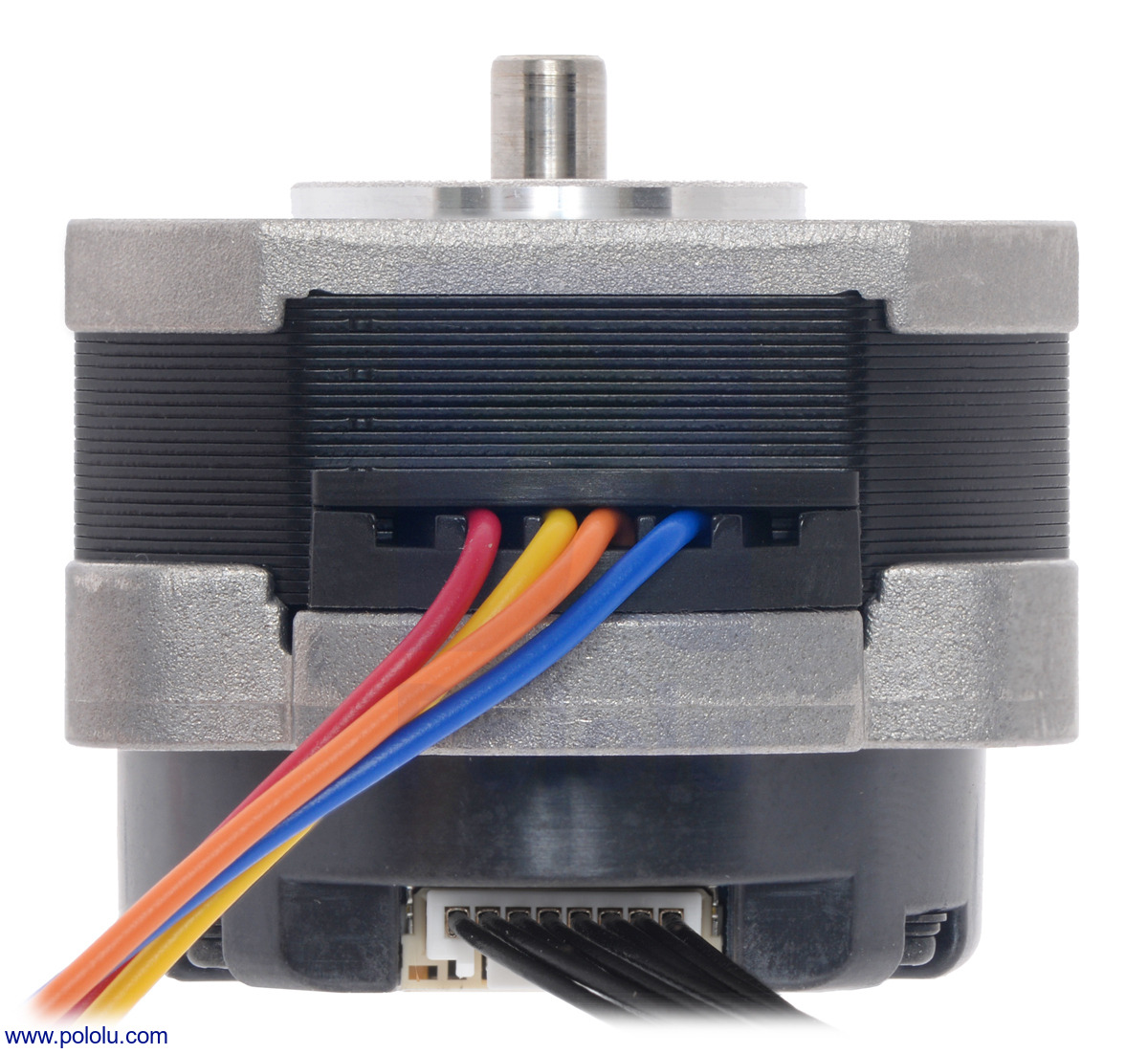
We are now offering two new NEMA 17-size pancake bipolar stepper motors from Sanyo, each featuring an integrated high-resolution quadrature encoder and home channel for absolute positioning.
| Stepper motor | Steps per revolution | Current rating (per coil) | Voltage rating | Resistance (per coil) | Holding torque |
|---|---|---|---|---|---|
| #2279 42×31.5mm | 200 | 1 A | 5.4 V | 5.4 Ω | 1.9 kg-cm (26 oz-in) |
| #2278 42×24.5mm | 200 | 1 A | 3.5 V | 3.5 Ω | 800 g-cm (12 oz-in) |
|
|
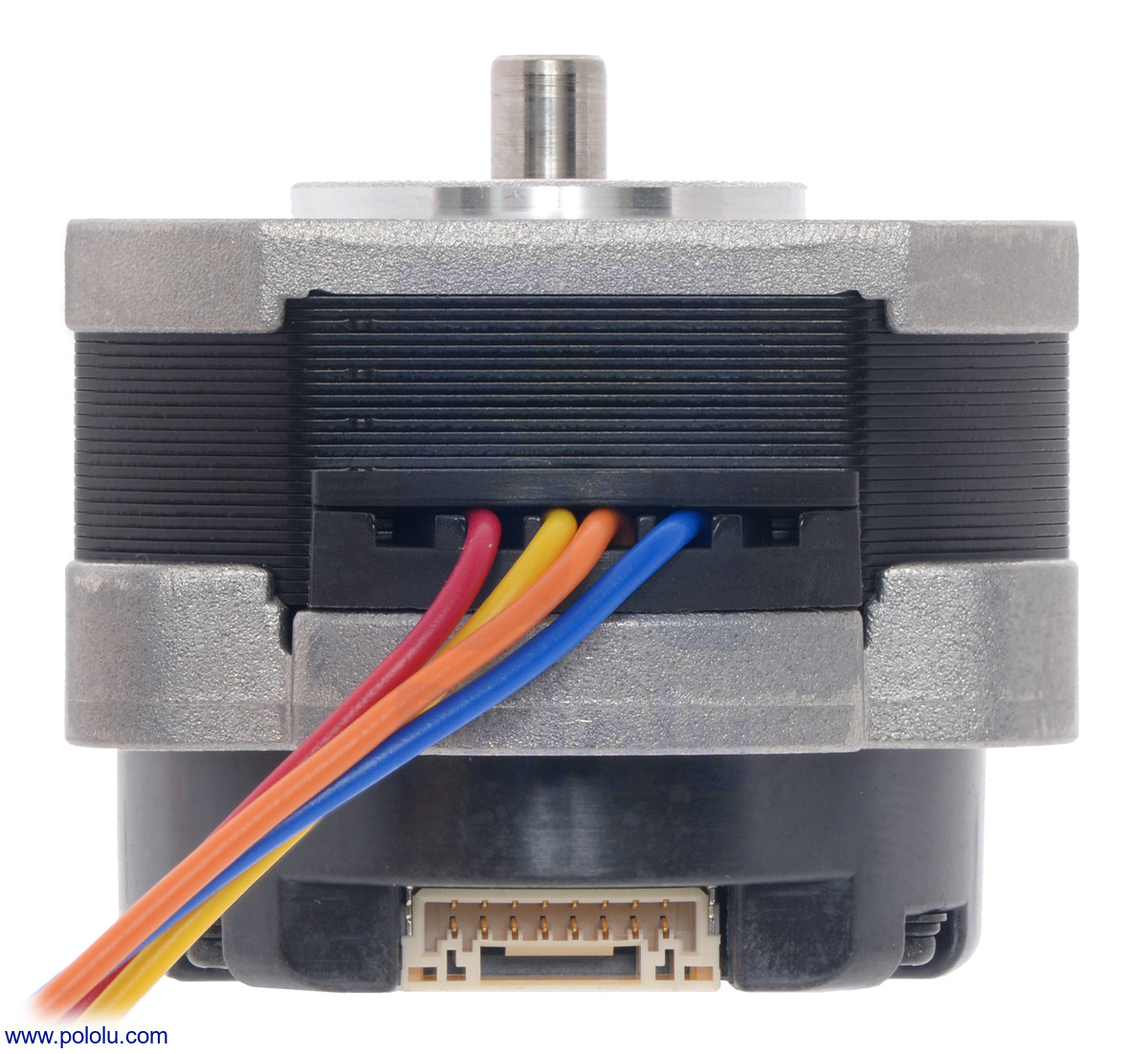
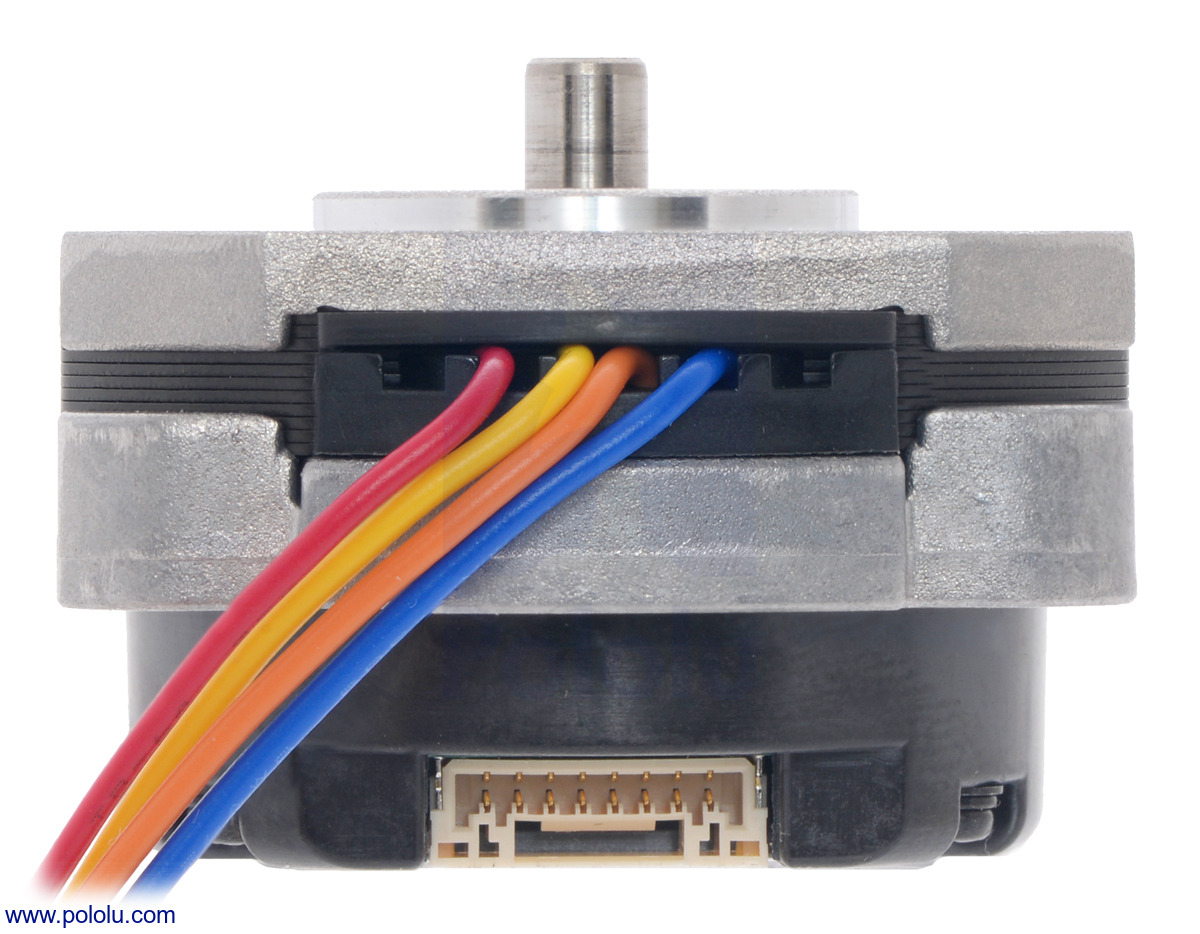
The integrated quadrature encoder operates from 5 V and has a resolution of 1000 P/R, which allows for 4000 counts per revolution (CPR) of the output shaft when counting both edges (i.e. rising and falling) of both channels (i.e. A and B). In addition to the A and B channel outputs, the encoder has a home channel, Z, that pulses once per revolution and can be used for absolute positioning. The encoder also has outputs for the inverse of A, B, and Z. A 15 cm (6″) encoder cable is included.
|
|
|


Related products


New 12V 1A wall power adapter
 |
We’ve replaced our original 12 V 1 A wall power adapter with a lighter, smaller version. This UL-listed 12 W, “wall wart”-style switching power adapter supplies up to 1 A at a regulated 12 VDC. The AC adapter works with input voltages of 100 to 240 VAC and has a 1.5 m (5 ft) DC power cord that is terminated by a center-positive, 5.5 × 2.1 mm barrel connector.

Free Circuit Cellar magazine April 2017
 |
Get a FREE copy of Circuit Cellar magazine’s April 2017 issue issue with your order, while supplies last. To get your free issue, enter the coupon code CIRCUIT0417 to your shopping cart, or click the link. The magazine will add 6 ounces to your order weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers.
Related products

Addressable through-hole RGB LEDs are back
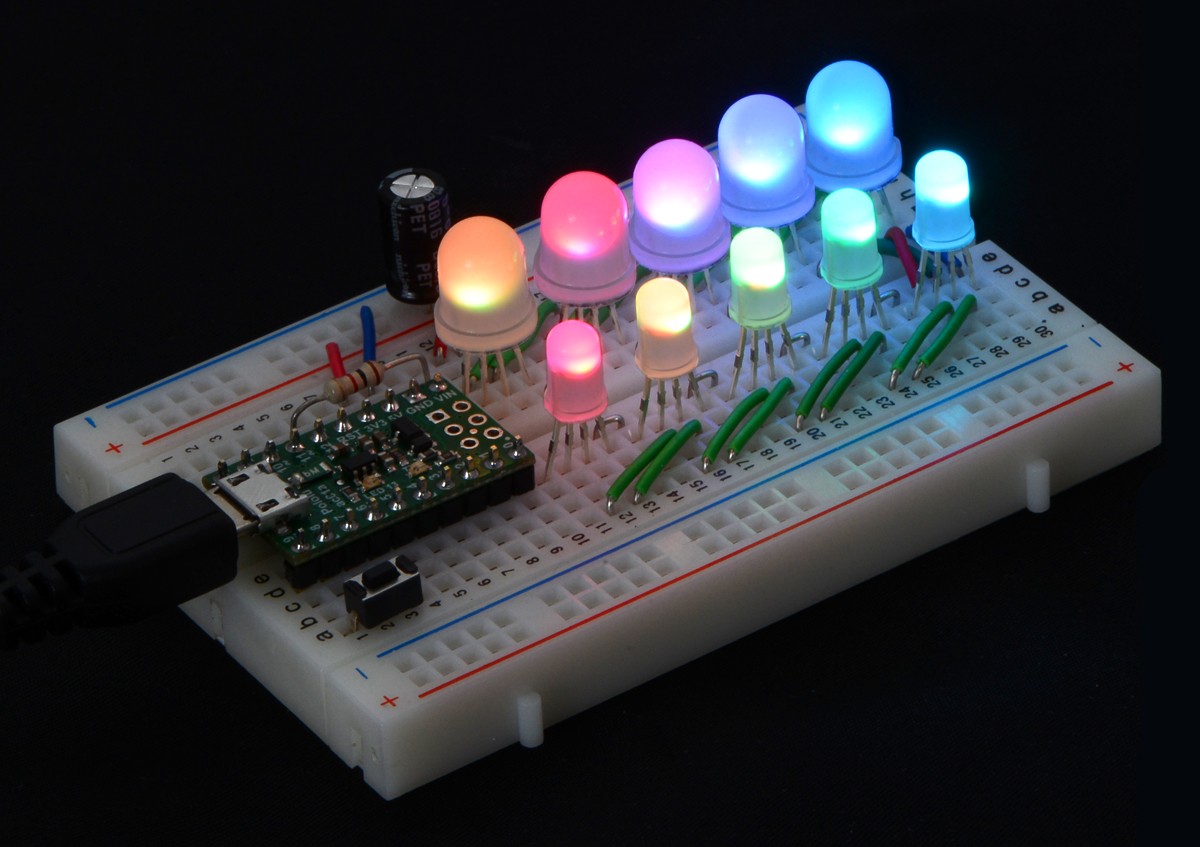 |
We’re happy to announce that our previously discontinued addressable through-hole RGB LEDs are once again part of our catalog and in stock! While these might look like ordinary RGB LEDs, each one contains its own integrated WS2811 LED driver that lets you chain them together and individually control them all with a single digital output from a microcontroller. The interface is very similar to that of our SK6812-based LED strips, so there is a variety of sample code available for the Arduino, AVR, and mbed microcontroller platforms.
The LEDs are available in two sizes: 5 mm and 8 mm.
 |
Two different sizes of addressable RGB LED. From left to right, their diameters are: 5 mm (#2535) and 8 mm (#2536). |
|---|
Related products


MechWarfare robot
Forum member jwatte posted about a robot he made for the RoboGames MechWarfare 2017 competition. The goal is to build a walking robot that tries to hit an opponent’s pressure sensors with airsoft pellets or melee weapons. The robots walk around in a scaled-down cityscape field. Autonomous operation and teleoperation are allowed, but teleoperators must view the field from cameras mounted on the robot.
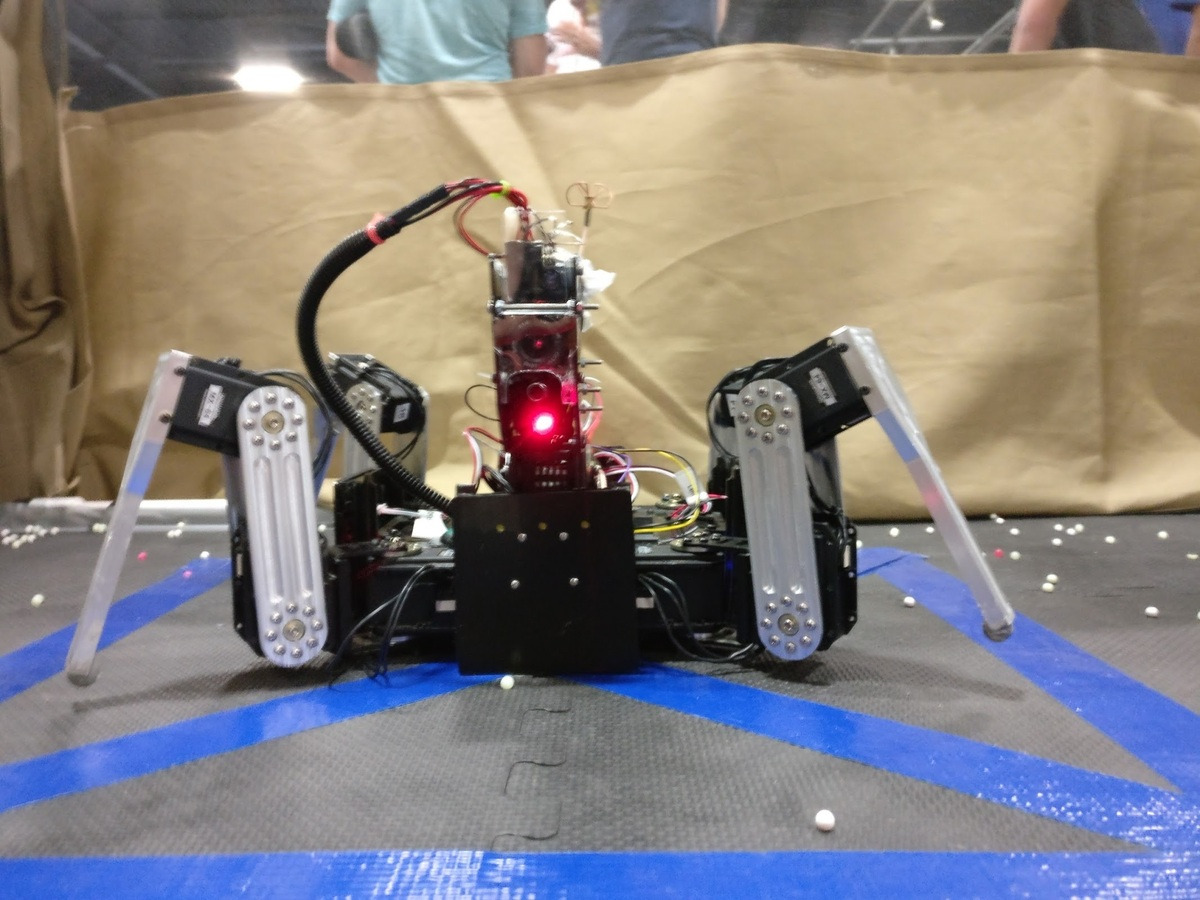 |
The mech uses a few Pololu voltage regulators: a 3.3 V, 1 A step-down regulator D24V10F3 powers a Xbee-Pro 900 XSC S3B wireless transciever and the laser pointer, a 6 V, 500 mA step-down voltage regulator D24V5F6 powers an OpenCM 9.04A robot logic board, and a adjustable step-down regulator D24V6ALV powers a 5.8 GHz wireless camera. A 250:1 Micro Metal Gearmotor LP 6V drives the plastic BB agitator that feeds the airsoft gun. The wiring harnesses used a lot of our pre-crimped wires.
For more details including a system block diagram see the forum post.
Related products




FEETECH Mini Servo FT1117M
 |
We added the FEETECH Mini Servo FT1117M to our expanding RC servo selection.This miniature-sized servo has a stall torque of 50 oz-in (3.5 kg-cm) and a speed of 0.11 sec/60° at 6 V. The pinion gear is plastic, but the rest of the gear train consists of all metal gears, allowing this servo to deliver the kind of speed and torque typically associated with larger servos.
Comparison to the Power HD 1711MG mini servo
This servo is a lower-cost alternative to the 1711MG from Power HD, which has nearly identical dimensions and performance. The two servos should be generally interchangeable for most applications. The picture below shows both the FT1117M and the 1711MG side by side:
 |
Expect more new FEETECH servos in the coming weeks!
Related products


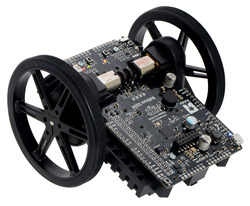
Video: Raspberry Pi robot with the Romi chassis
A few weeks ago I posted a tutorial on building a Raspberry Pi robot with the Romi 32U4 Control Board and Romi Chassis. Now we have a short video of the robot in action! For the full tutorial, see my earlier post.
Related products



How to make a Balboa robot balance, part 5: popping up and driving around
This is the fifth and final post in a series about how to make a Balboa 32U4 robot balance. In earlier posts I covered everything you need to get the robot balancing. In this post I will talk about how to get your Balboa to perform some fun and challenging maneuvers.
If you have been following along, you should now have your robot using its inertial sensors, motors, and encoders together to balance in place. Now it’s time to get it moving! Our first challenge will be to get it to “pop up” from a resting position into a balancing position. Then I will show how you can get the Balboa to drive around while balancing. Continued…
Ten-Tec 1254 Receiver Display Upgrade Kit
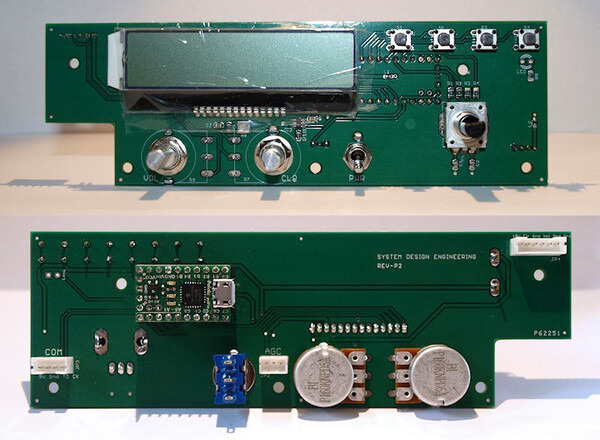 |
Edward Cholakian (call sign KB1OIE) makes and sells a Ten-Tec 1254 Receiver Display Upgrade Kit that is designed to upgrade a Ten-Tec 1254 shortwave radio receiver.
One of the main features of the kit is that it provides a backlit 2×20 character LCD to replace the receiver’s original 5-digit 7-segment display, allowing much more information to be shown. The kit includes a clear plastic window to replace the receiver’s original smoked dark plastic window, and a black plastic display mask. Edward gets both of these pieces made using our custom laser-cutting service.
 |
Two laser-cut pieces, a clear window and black display mask, shown on top of the Ten-Tec 1254 receiver’s original face plate. |
|---|
 |
Ten-Tec 1254 receiver with Edward Cholakian’s display upgrade kit installed. |
|---|
The display/control board in the kit uses the P-Star 25K50 Micro as its processor. Edward, a consulting engineer who designs embedded hardware and firmware, told us that he chose the P-Star because he was already using a Microchip processor similar to the P-Star’s PIC18F25K50 in one of his previous designs, and it was more economical to buy the P-Star than to hand-assemble his own board. He said the P-Star’s cross-platform USB firmware upgrade software was also a plus since his own bootloading software does not support Linux and macOS.
The kit comes with software for Windows that can control the receiver over USB. The software provides a graphical user interface and uses WinUSB to talk to the P-Star’s native USB interface.
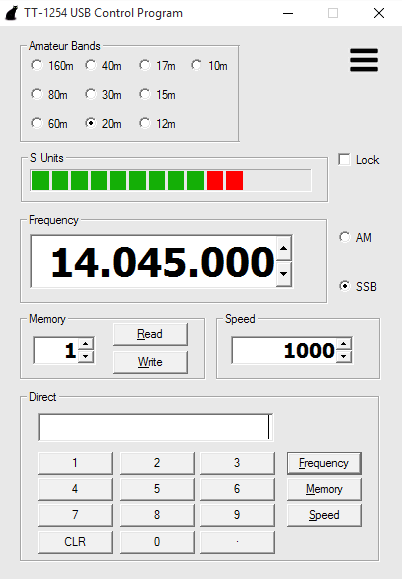 |
USB control program for the Ten-Tec 1254 Receiver Display Upgrade Kit |
|---|
For more information, see the Ten-Tec 1254 Receiver Display Upgrade Kit page.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










