Pololu Blog »
Pololu Blog (Page 33)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Balboa is here!
 |
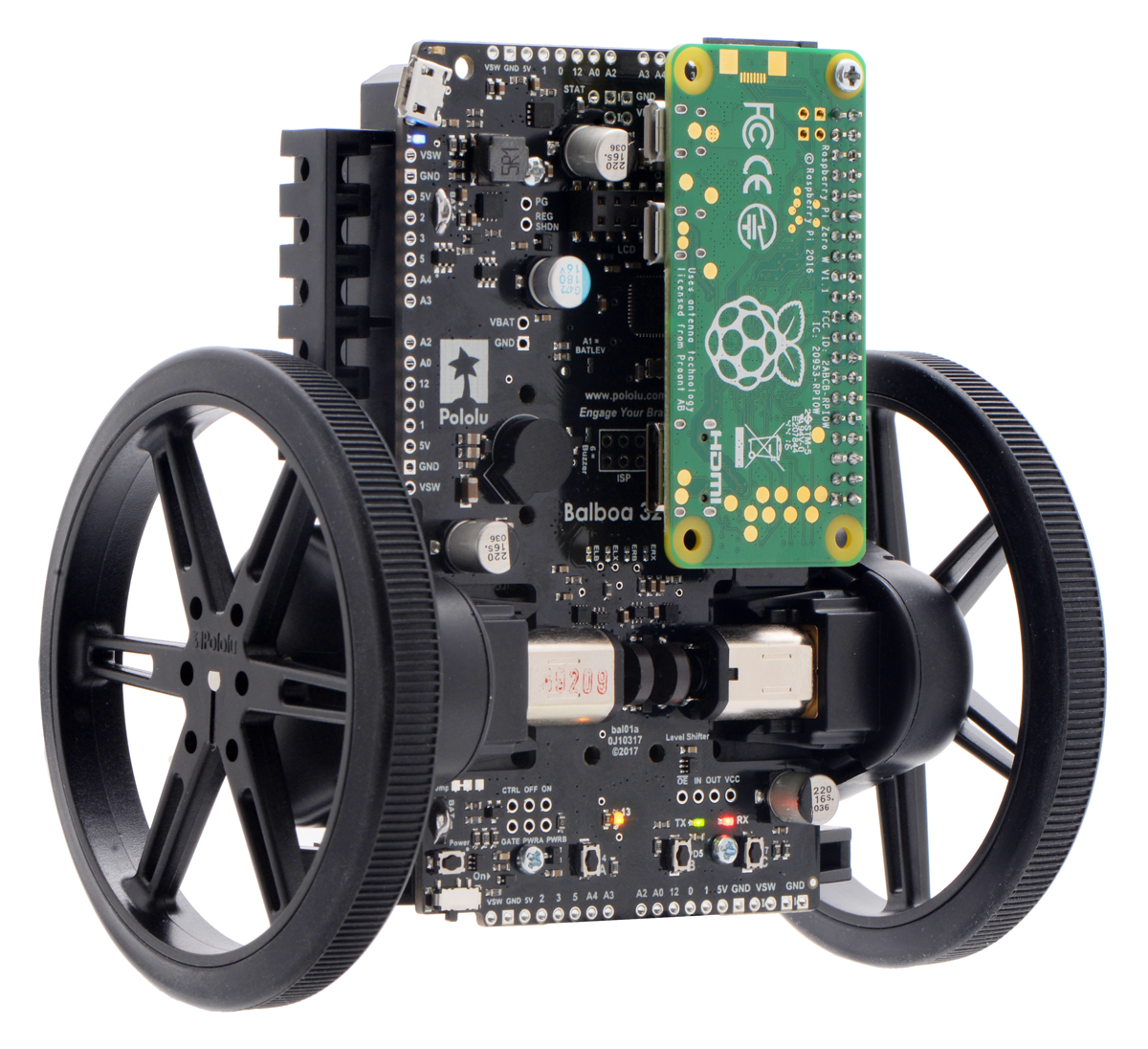
I am excited to announce the release of the Balboa robot! The Balboa is a two-wheeled balancing robot platform that is small enough to tempt you to run it on a desktop, but it’s quick enough that you should probably stick to bigger, softer surfaces. Or at least put a safety net or foam pit around your desk. Here is a short video showing it kicking up into balancing position and driving around:
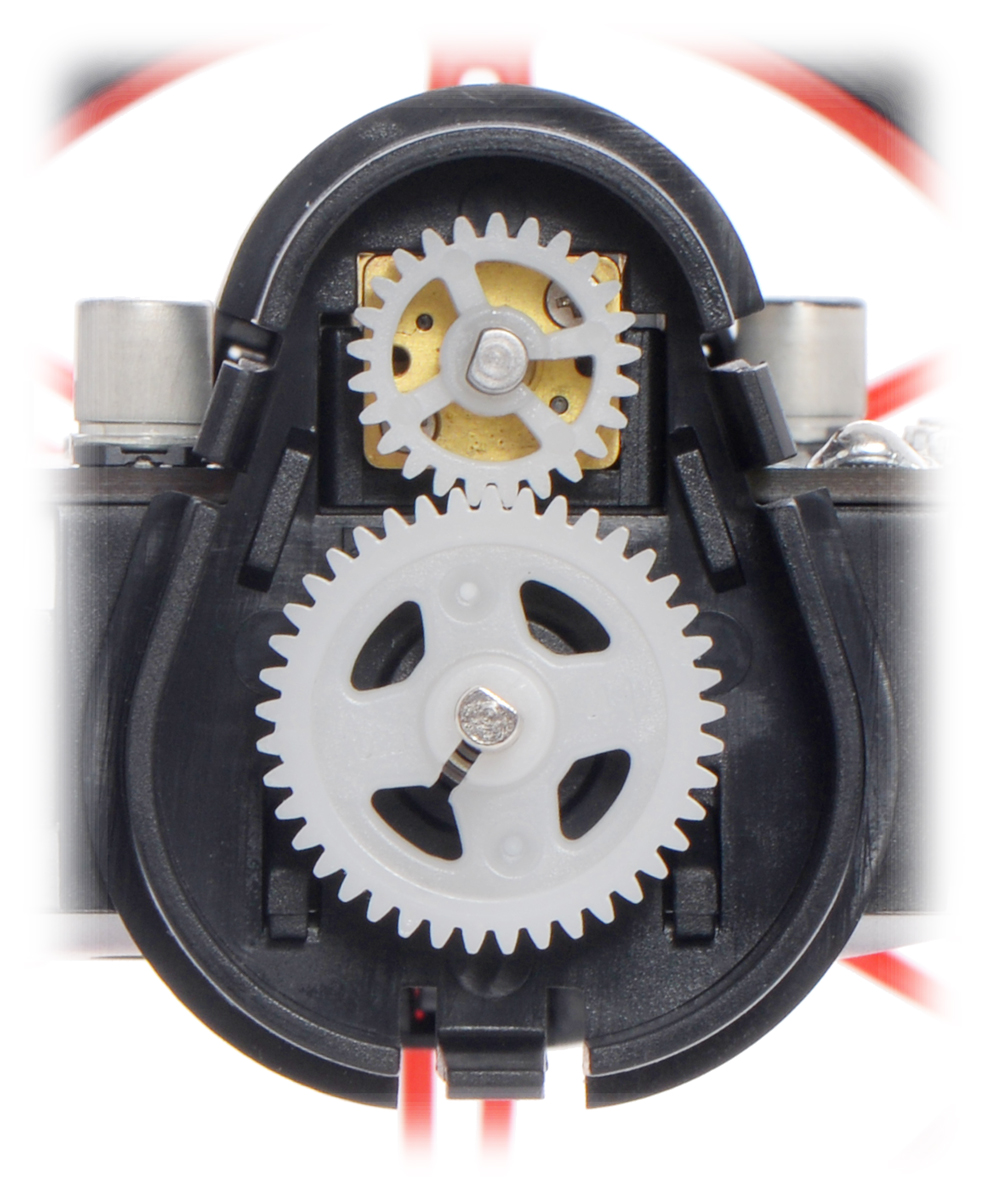 |
A look inside the external gearbox on the Balboa 32U4 Balancing Robot. |
|---|
One of our main goals in designing our robots is to make them complete and engaging on their own while making them open and expandable enough for all kinds of projects. We also don’t want them all to be the same. Most of the Balboa robots in our pictures have 80 mm wheels, but the chassis can also work with our 90 mm wheels (and to a lesser, barely practical extent, our 70 mm wheels). Because the chassis is made for our micro metal gearmotors, you have a few options for gear ratios as with our Zumo sumo robots, but what’s really exciting about the Balboa design is that there is an extra stage of gear reduction for which you get five different options (all included, and you can easily change the gear ratio from whatever you initially choose). The design also allows the drive wheels to be supported on ball bearings, reducing the stress on the micro metal gearmotor output shafts.
The Balboa chassis has a built-in battery holder for six AA cells, which typically give you several hours of run time, even if you add some extra power-hungry electronics like a Raspberry Pi.
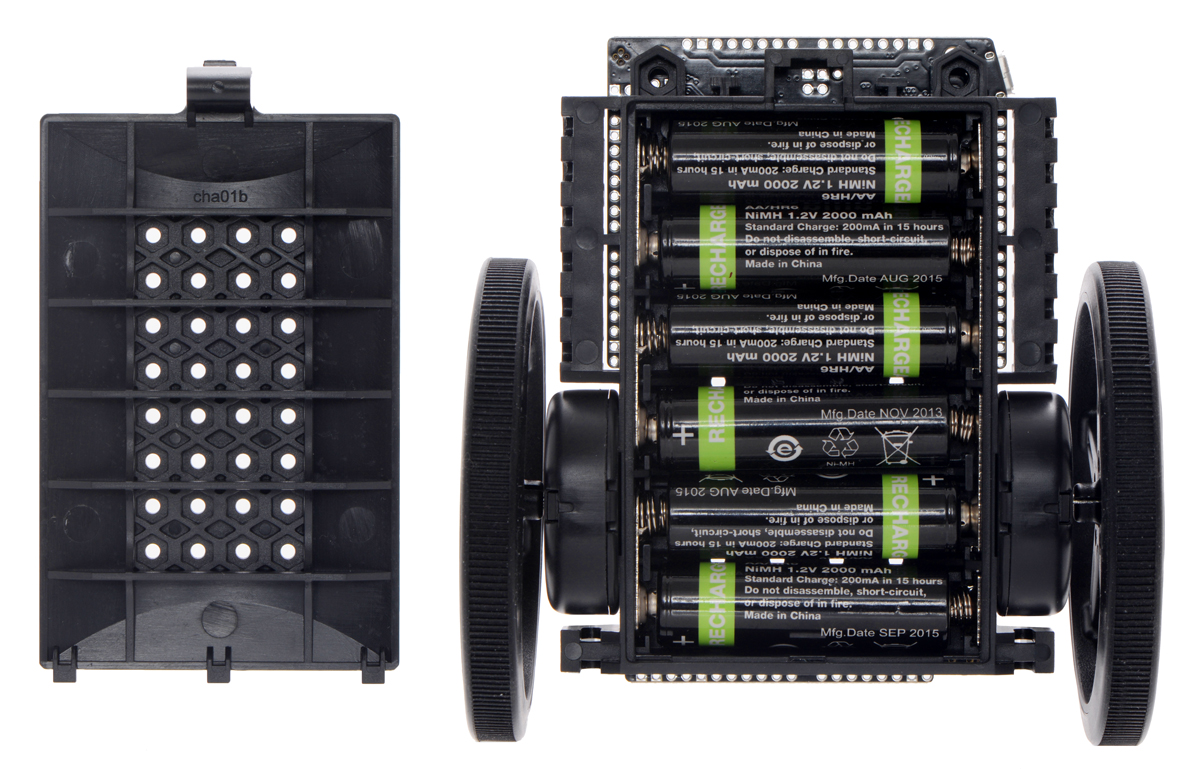 |
Balboa 32U4 Balancing Robot with battery cover removed. |
|---|
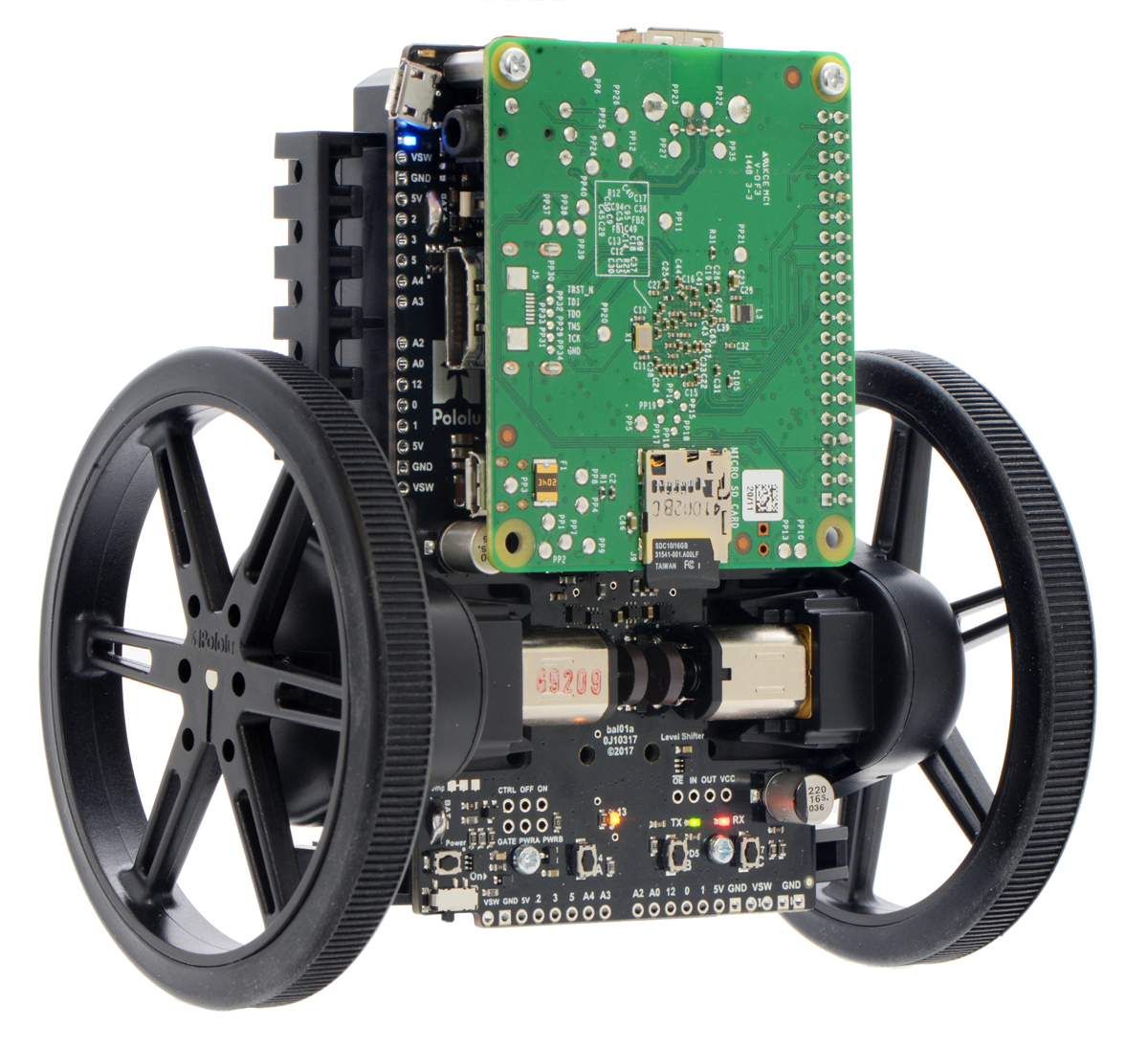
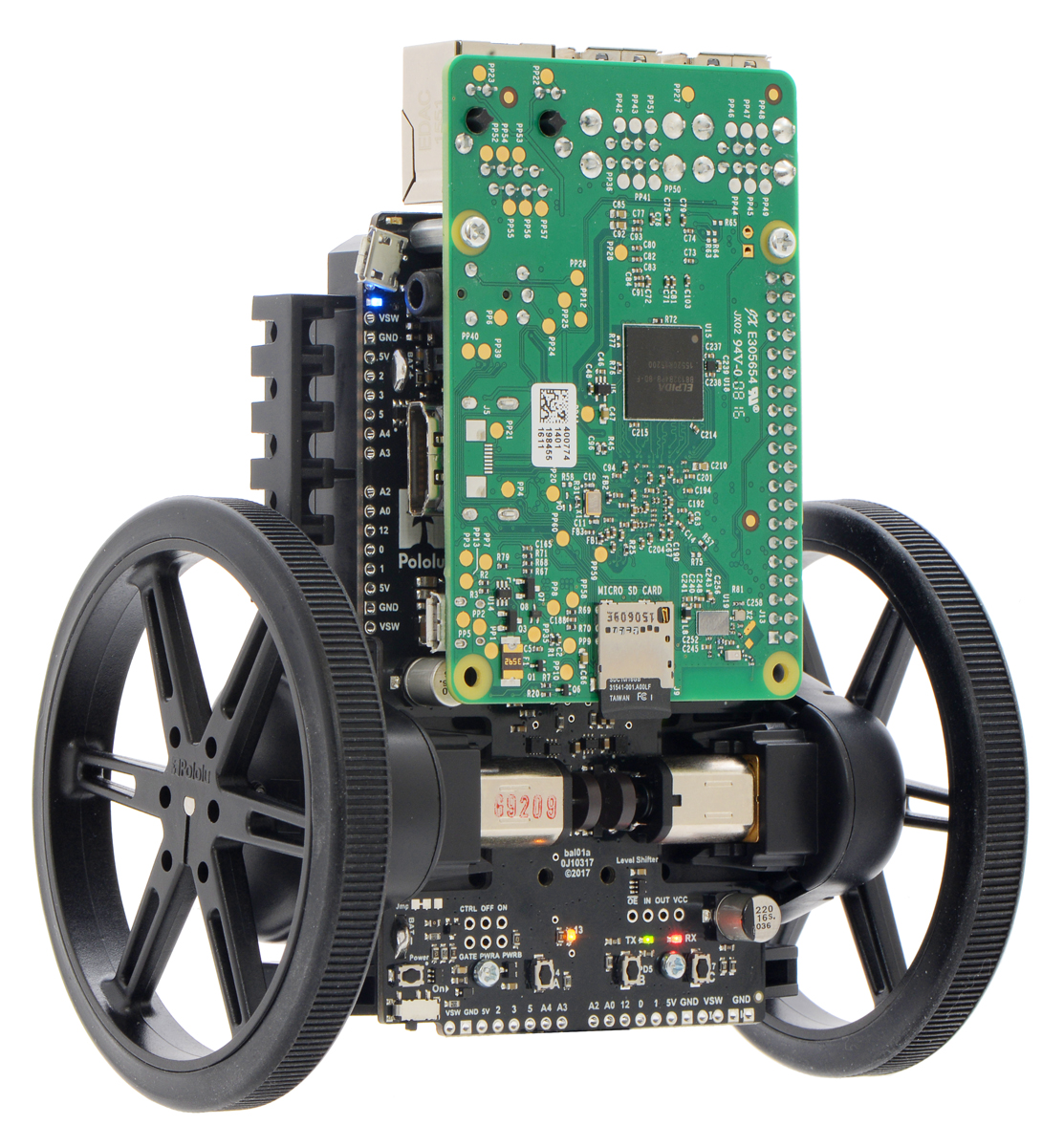
The main microcontroller is an Arduino-compatible ATmega32U4, which is powerful enough to read the on-board IMU sensors and encoders and to control the motors to balance the robot; it’s also great for introductory projects like line following or reading an RC receiver to make a radio-control balancing robot. For advanced projects, the Balboa is ready for you to add a Raspberry Pi computer to perform high-level algorithms while the ATmega32U4 microcontroller takes care of low-level tasks like motor control.
|
|
|
We will be adding more content to the Balboa’s product page and user’s guide, and we will have more blog posts about the Balboa robot. For today, we’ll end with some slow-motion footage of Balboa popping up on its own and then recovering when Paul knocks it around a bit:
Related products

Rainbow baby Eve

It’s been more than two years since my last post. I thought I would post an update a year ago, when Eve was born, but that didn’t go very well, and the uncertainty about how things would turn out with her made it difficult to rally around her birth as some celebratory point from which to start moving on. I feel at once as if I have lost two years of my life, making no progress, and yet that my life has completely transformed in that time. But I know things have gotten better because I am usually free of the sadness and fear that still filled me a year ago, around Dez’s first birthday. Continued…
Custom Mini Sumo robot
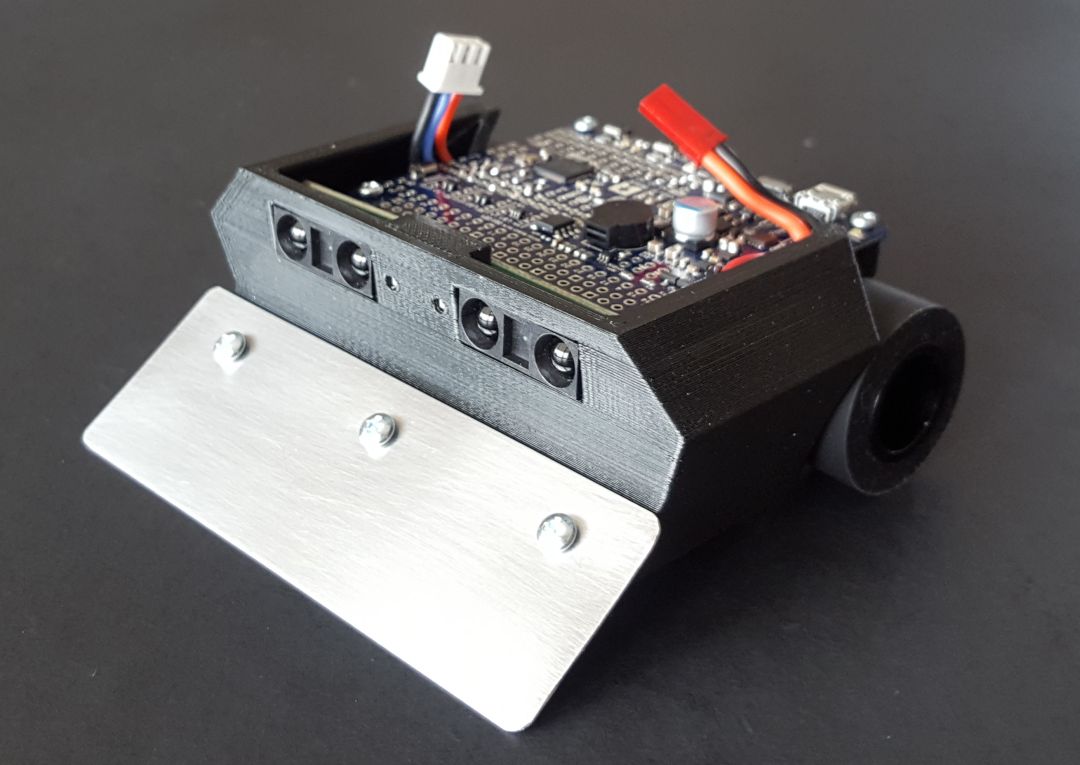 |
Forum user DrGFreeman has been posting about his custom Mini Sumo robot. He designed the chassis in CAD and 3D printed it; the model is available on Thingiverse. An A-Star 32U4 robot controller reads the QTR-1RC reflectance and Sharp GP2Y0A60SZLF analog distance sensors while powering the motors with its dual onboard motor drivers. DrGFreeman plans to build two copies of the robot: one with 75:1 micro metal gearmotors and one with 50:1 micro metal gearmotors so he can pit them against each other and figure out whether more speed or torque does better. This video shows the behavior he’s programmed so far:
The whole build log along with more pictures and discussion is in the forum post.
Related products







Continuous testing for Arduino libraries using PlatformIO and Travis CI
 |
At Pololu we maintain around thirty open-source Arduino libraries, and we keep adding new ones whenever we make a new carrier board or Arduino shield. People typically use these libraries with Arduino-compatible boards, such as our A-Star programmable controllers or Arduinos. We also have Arduino libraries for our user-programmable robot kits like the Romi 32U4 robot, Balboa 32U4 robot and Zumo 32U4 robot.
Sometimes we need to make changes to a lot of libraries at once, like when we wanted to add all of our libraries to the Arduino Library Manager. For us, library manager compatibility requires changing the directory layout, but doesn’t require changing the library or example code. With this many libraries to change, there is a risk of potentially breaking a working library by misspelling or moving a file incorrectly. Fortunately, customer Walt Sorensen introduced us to PlatformIO and Travis CI, which let us test compiling Arduino libraries every time they are pushed to GitHub.
Setting this up is easy enough that we encourage you to do it on your Arduino libraries! First, sign up for Travis CI (a testing service, free for open-source projects) and enable it for the GitHub repository you want to test. Now, every time you push new code to your repository, Travis CI will try to see if there is a .travis.yml file in the top level with instructions for running tests.
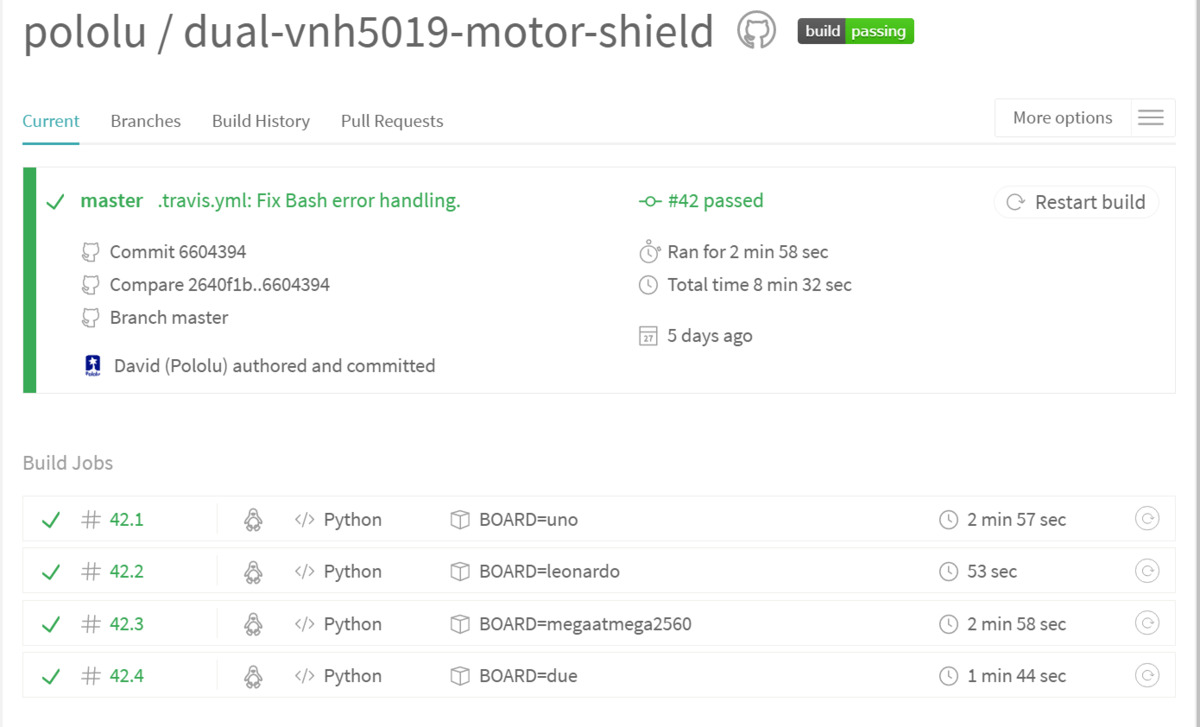
If your project has the structure of an Arduino Library Manager project and you have at least one example sketch, our short .travis.yml file should work. This file instructs Travis CI to compile the library and its examples against all the supported Arduino boards (specified in the “env” list of the .travis.yml file). The results can be seen on Travis CI’s website (for example, here is Pololu’s Travis CI page). The Arduino compiler is provided by PlatformIO, an open source ecosystem for internet-of-things development, which supports a long list of Arduino-compatible boards.
You can share your Travis CI build status by embedding a badge into your GitHub readme page:
 |
Of course, for most library changes, we still have to test on actual hardware, but now every time we update our libraries (or a contributor submits a pull request), we can be sure they will at least compile on every supported board.
Bohlebots win West German Robocup soccer 2017
Congratulations to the Bohlebots teams for winning all four open categories of the West German Robocup soccer 2017! Robocup soccer is a competition where two autonomous robots on each side play soccer in a walled arena. We covered them winning multiple times in the past on this blog. Their robots use Pololu 20D mm metal gearmotors and VNH5019 motor driver carriers.
 |
Bohlebots junior team winning West German Robocup 2017 soccer open 1v1. |
|---|
Related products

ZumoMotors library for Netduino
|
|
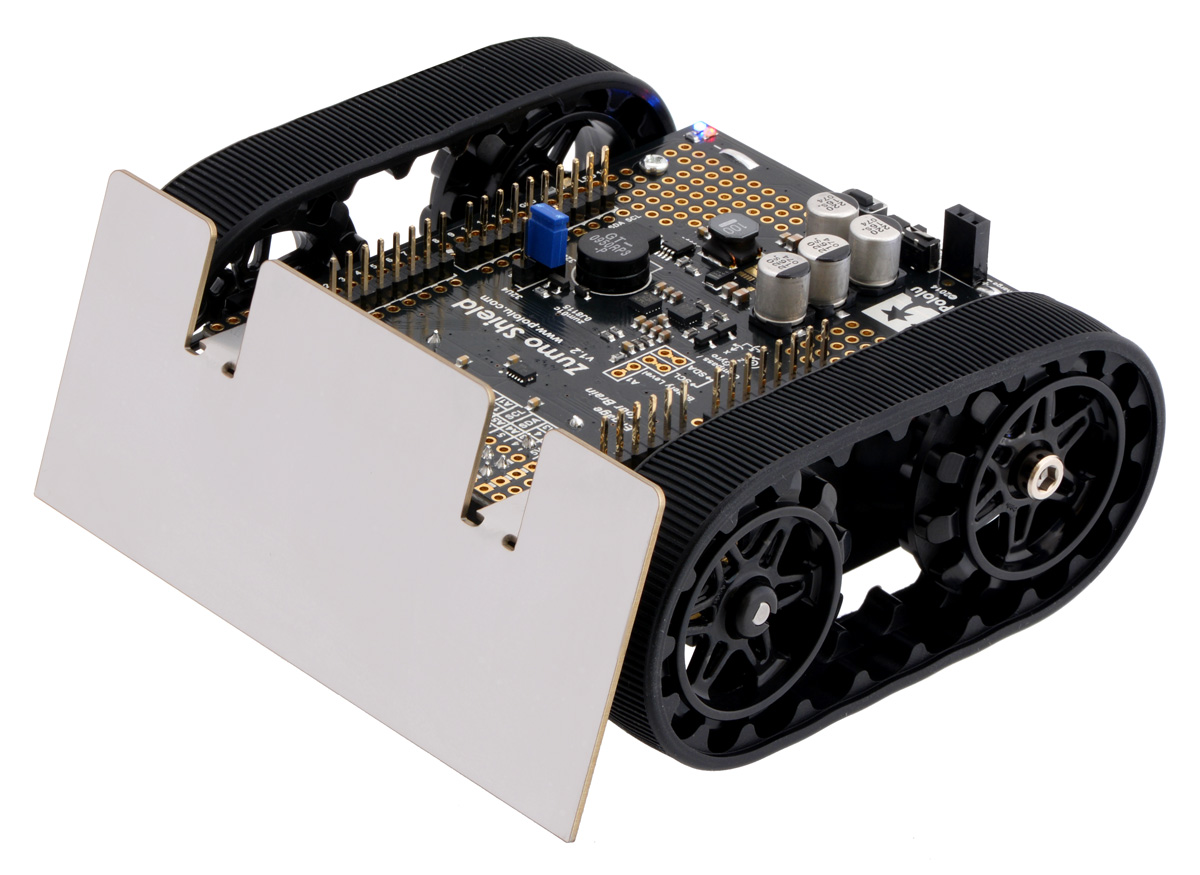
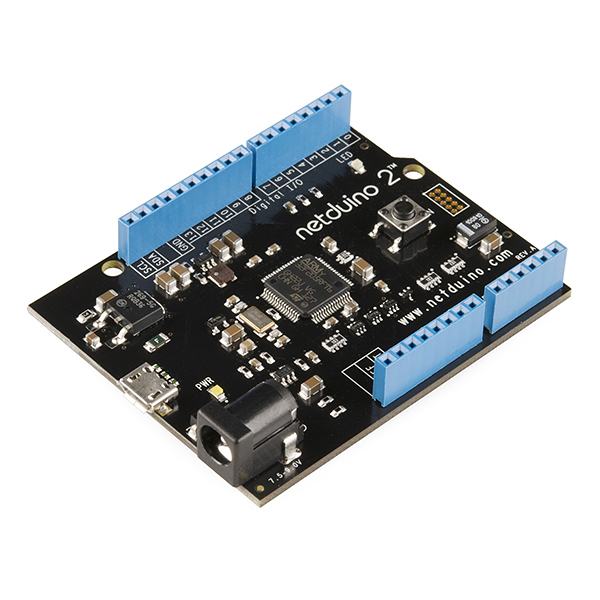
The Pololu Zumo Robot for Arduino is designed to be essentially a shield for the A-Star 32U4 Prime, Arduino Uno or Arduino Leonardo. Other Arduino boards that conform to the Arduino interface might work too. For example, customer Omar Elabd ported the ZumoMotors library to his Netduino 2! The Netduino is a 32-bit microcontroller board similar to Arduino that runs the .NET Micro Framework instead of using the Arduino environment.
He posted his code on GitHub and announced it on his blog. He is thinking of expanding his library to include ZumoBuzzer and ZumoReflectanceSensorArray libraries. The library is written in C#, which is exciting since I’m a C# programmer myself! If others would like to expand on these libraries, Omar is open to code contributions.
Related products

Ball-balancing robot
One of our customers, Jochen Alt, built a robot that balances on top of a ball by driving around on it with omni-wheels. Even better, he very thoroughly documented the project on GitHub! The robot uses a number of parts from Pololu including 37D mm metal gearmotors with encoders, stamped aluminum L-brackets for 37D mm metal gearmotors, and three VNH2SP30 motor driver carriers.
A good overview of the robot and the control system are on his Hackaday project page.
Related products


New distributors in Asia and Australia
Last week, I wrote about our new distributors in the Americas. We’ve also added three new distributors in Asia and Australia since our last round of new distributor introductions:
 |
ToolParts is an online store in Seoul, South Korea, bringing our total number of distributors in Korea to five! They carry a selection of Pololu products including voltage regulators, motor drivers, and sensors.
 |
Tronixlabs Australia is an online store located near Melbourne. They offer $5 flat rate shipping for all of Australia, and they do same-day shipping (a service we are also proud to offer at Pololu). They join our six other Australian distributors. Visit their Pololu products category to see what they carry.
 |
See the full list of over 200 distributors to find one in your area.
Cedarville University Solar Boat Team
 |
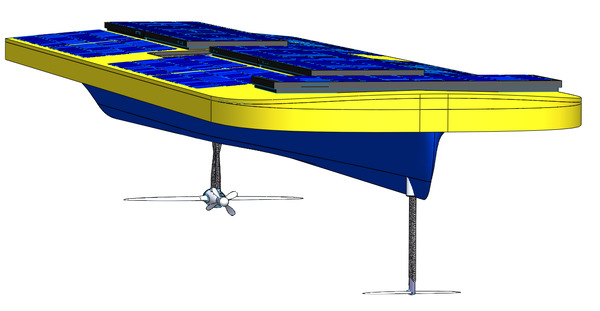
A technical paper about hydrofoil design by members of the Cedarville University Solar Boat Team won a $1,000 Honorable Mention in the 2016 Mandles Prize for Hydrofoil Excellence from the International Hydrofoil Society. The boat they’ve been building uses a few Pololu Jrk 12v12 USB motor controllers to drive linear actuators that control the hydrofoil angle of attack which controls the boat’s flight. (Yes, flight: a hydrofoil boat uses wing-like hydrofoils that lift up the hull as they “fly” through the water.) They plan to enter this boat in the “Top Class” of the Dutch Solar Challenge. The “Top Class” provides entrants the opportunity to design every aspect of their solar-powered boat, which they will use in a series of sprint and endurance races over the course of five days. They also plan on racing in the Solar1 Solar Boat World Championship at the Yacht Club de Monaco.
 |
Related products

Science Olympiad 2017 robot arm competition
Congratulations to Matthew Siracusa and William Rule who placed first in the Robot Arm competition of the Science Olympiad SE PA Regional Tournament last Wednesday! They used our custom laser cutting service to cut the base and structural components of the robot arm out of black ABS. We wrote about another one of Matthew’s projects on this blog when he made a 6-string banjo (that has a frame we also laser cut) as part of the 2014 Science Olympiad.
The Science Olympiad website has more information about the Robot Arm competition.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










