Pololu Blog »
Pololu Blog (Page 36)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Laser cut 6-string banjo frame
Here is a brief video a customer just sent us showing how he used our custom laser cutting service to create the frame on his custom 6-string banjo.
Pololu and LVBots CES Open House 2017
 |
Are you attending CES or in Las Vegas this Friday evening? You can join Pololu and LVBots on January 6 any time from 5 p.m. to 8 p.m. for CES Open House 2017! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide pizza. Registration and other details are on the LVBots Meetup page.
Closed December 26 and January 2
 |
We will be closed for Christmas on Monday, December 26 and for New Year’s Day on Monday, January 2, so orders placed after 2 PM Pacific Time on the 23rd or 30th will be shipped on the following Tuesday. Additionally, FedEx Ground does not ship on the 23rd (today).
Merry Christmas and happy New Year!
“Knock knock unlock” puzzle box
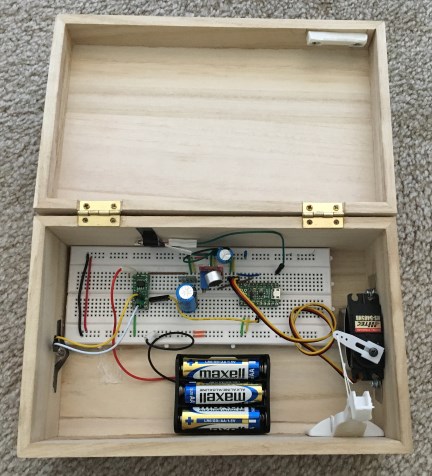 |
With the holiday season upon us, many are on the hunt for interesting projects that we can give as gifts. This year, why not make your project about unveiling your gift? You would still have to get an actual gift to put inside the box, but you’d win major style points. Forum member Bob Day’s knock knock unlock puzzle box has no visible way of opening it, but given the right combination of knocks will unlatch itself with the help of a servo and several other electronic components inside. The puzzle box is controlled by an A-Star Micro, which is powered by our S7V8F5 voltage regulator and a mini LV pushbutton power switch. The power switch is turned on by a mercury tilt switch and turned off by the A-Star if no knocks are received for about 30 seconds. This power switch circuit allows power to be completely turned off, which should extend the battery life tremendously over just leaving the A-Star on. (For advanced microcontroller programmers, another option would be to put the A-Star into a low-power mode.) A list of the parts and connections used and some example code for the box are given on Bob’s blog.
 |
“Knock Knock Unlock” Puzzle Box outside view. |
|---|
If you found this project interesting, you might also like a similar GPS puzzle box, also created by Bob, that we featured on our blog last year. That box unlocked when brought to a specific location and included a simpler toggle switch for power and an LCD screen.
Related products




Breakout Bros review of the Zumo 32U4 Robot
 |
Here at Pololu, we think our Zumo 32U4 Robot is great! It’s one of our flagship products – a compact little robot packed full of features and tailored for mini-sumo. Whether you are a high school or college student learning to program through the Arduino IDE, or you are a C++ programming god and want to dabble in hardware for mortals, we think it’s a fantastic robot that you’d really enjoy. But, hey, you don’t have to take our word for it! Josh over at Breakout Bros has started a review series on robot kits, and recently posted his review of the Zumo 32U4. Check it out!
 |
Have an opinion about that review? Maybe you have existing reviews of our products that you haven’t already shared with us? Feel free to post a comment about any of that below, or share your opinion on our forum. If you prefer, you can also contact us directly.
Automated typewriter that takes dictation using Maestro
Forum user ZipZaps shared a fantastically charming project that uses a 24-channel Maestro servo controller to automate a Smith Corona typewriter using the speech recognition built into Windows. The Maestro controls a mechanism consisting of multiple rows of servos on some small linear rails to strike the keys in a manner resembling the way a person would normally interact with the typewriter. An Arduino paired with a Big Easy driver controls the stepper motor used to slide the carriage return system.
 |
You can find more pictures and information about this project in ZipZaps forum post.
Related products

Cyber Monday 2016

We have had a lot of fun with this year’s Black Friday/Cyber Monday sale so far, and I hope many of you have, too. The sale isn’t over yet, but it will be soon, so make sure you get any last-minute orders placed in the next eight hours!
Also, a big thank-you to the shipping department for getting all the orders out (especially to those who came in on the weekend to make sure everything went smoothly)!
 |
Black Friday 2016
Our Black Friday / Cyber Monday sale is going strong, and we have been working hard to make and ship the products that people are getting great deals on. If you have already placed an order, thank you! If you are still trying to decide if you want to take advantage of our amazing deals, don’t wait too long—the sale ends Monday night.
Act now to get free-ish shipping during our Black Friday/Cyber Monday Sale!

We’re less than two days away from our annual Black Friday/Cyber Monday sale, our biggest sale of the year! This year, in addition to our usual doorbuster deals (limited total quantity promotions at extreme discounts) and large discounts, we are offering up to $7 off of shipping for those who claim their coupon before the sale begins. For many of our smaller items shipping within the US, that discount will be enough to make shipping free, and it should also make a meaningful reduction in shipping costs for our international customers who want to participate in this American tradition. To take advantage of this offer, just log in to your account and follow this link, which will generate a coupon code just for you. You must get your coupon before the sale begins, and you can then use it during our sale, which will run from Wednesday, November 23 through Monday, November 28. Keep an eye on our Black Friday/Cyber Monday sale page for all the latest about the sale!
New product: Raspberry Pi Model A+ 512MB RAM
 |
We are now carrying the Raspberry Pi Model A+ 512MB, which is just like the previous Model A+ but with double the RAM, so it also works with our various Raspberry Pi expansion boards. In particular, it can be combined with our A-Star 32U4 Robot Controller with Raspberry Pi Bridge to make a powerful control center for a small robot (check out this tutorial).
 |
A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge on a Raspberry Pi Model A+. |
|---|
And speaking of small robots, stay tuned for some fun new products that will also work with the Raspberry Pi!
 |
Related products





Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation











{kind=link}