Pololu Blog »
Pololu Blog (Page 38)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Animatronic tentacle mechanism using Pololu Universal Mounting Hubs
|
|

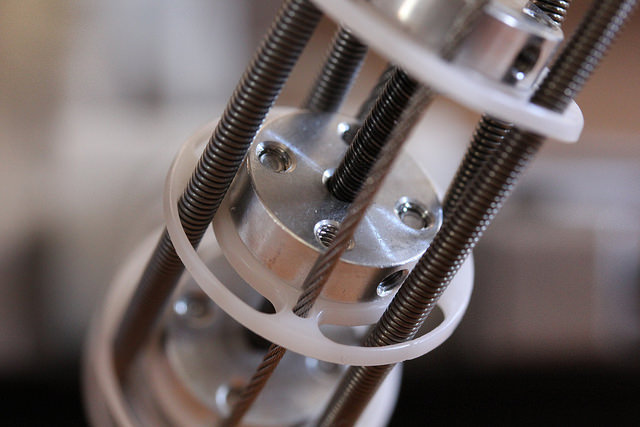
While our Universal Mounting Hubs are mainly intended as general-purpose adapters for motor shafts, it seems that they can also be used to help build a cable-actuated animatronic tentacle. Joshua Vasquez posted an article on Hackaday about his two-stage tentacle mechanism with “vertebrae” made from Universal Mounting Hubs and laser-cut Delrin pieces. (We didn’t do the laser cutting for this project, but our custom laser cutting service might be interesting for anyone wanting to make similar parts.) If you want to simultaneously impress and creep out your friends this Halloween, this seems like an interesting project to try!
Read more about Joshua’s project on Hackaday.
Related products


Video: Romi chassis assembly






Control a GoPro remotely using a CamDo Bullet and RC switch
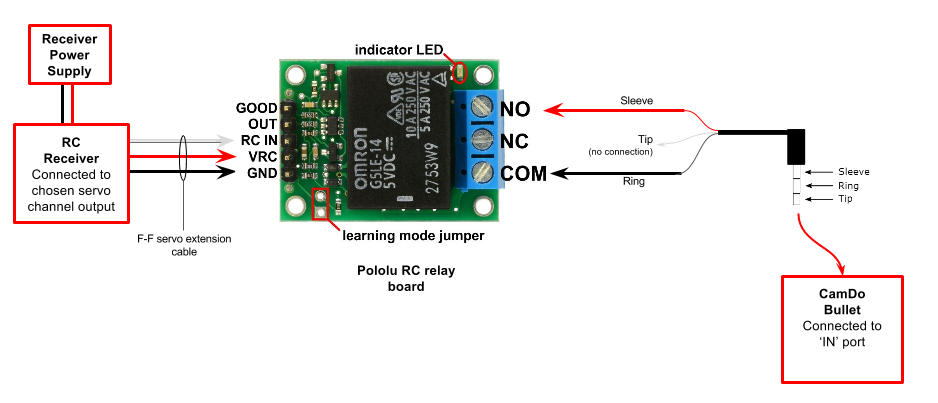 |
When capturing photographs of wildlife, it is not always feasible to be close enough to trigger your camera with a standard wired remote. In these cases, using an RC transmitter and receiver pair would be ideal, but most cameras and their remotes do not accept hobby RC signals. This blog post, written by CamDo, explains how to use one of our RC switches with a built-in relay and their Bullet wired remote interface to trigger a GoPro camera from an RC transmitter from hundreds of meters away. The setup can be used with any standard RC transmitter and receiver pair, and you only need one pair and one RC switch to control several cameras at once.


New Romi chassis
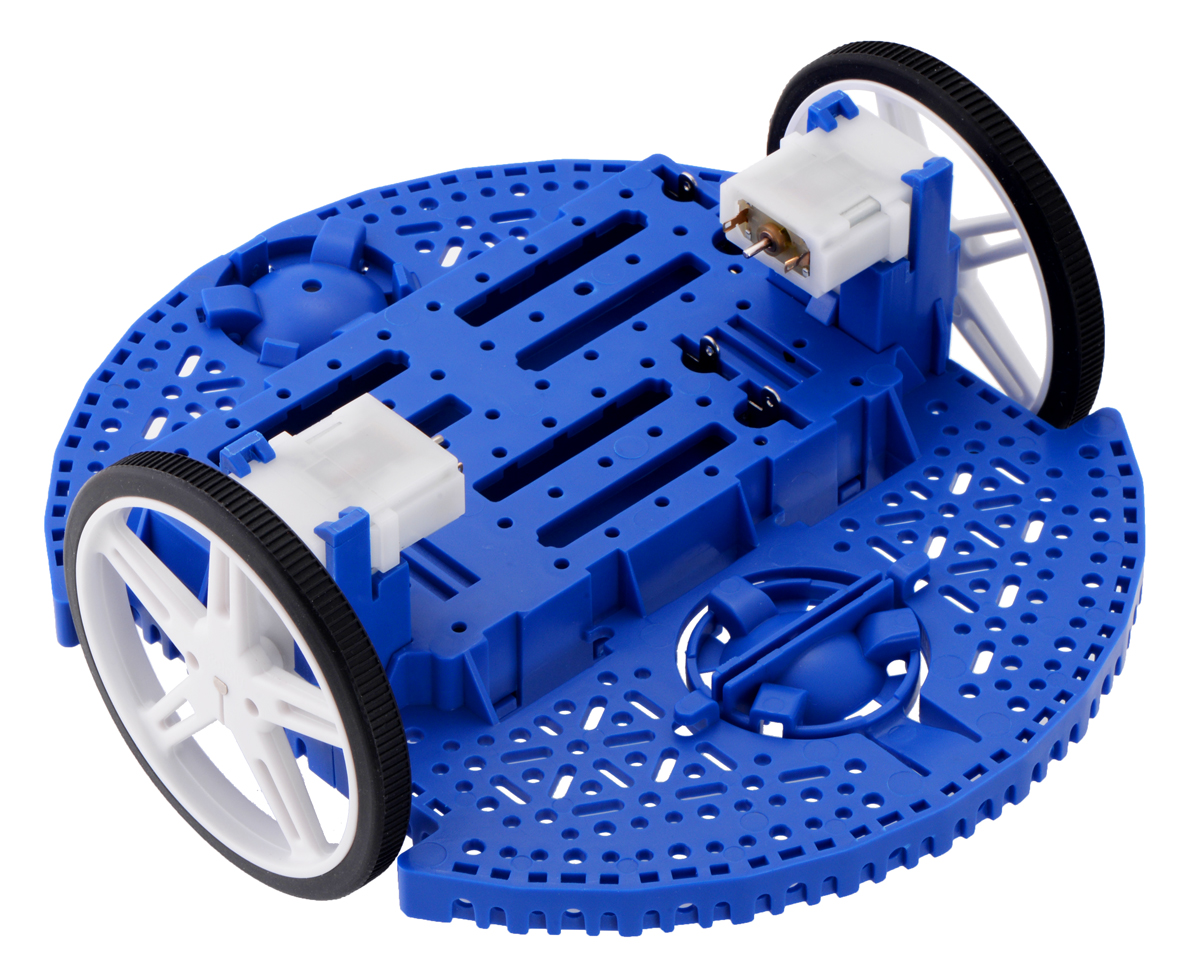 |
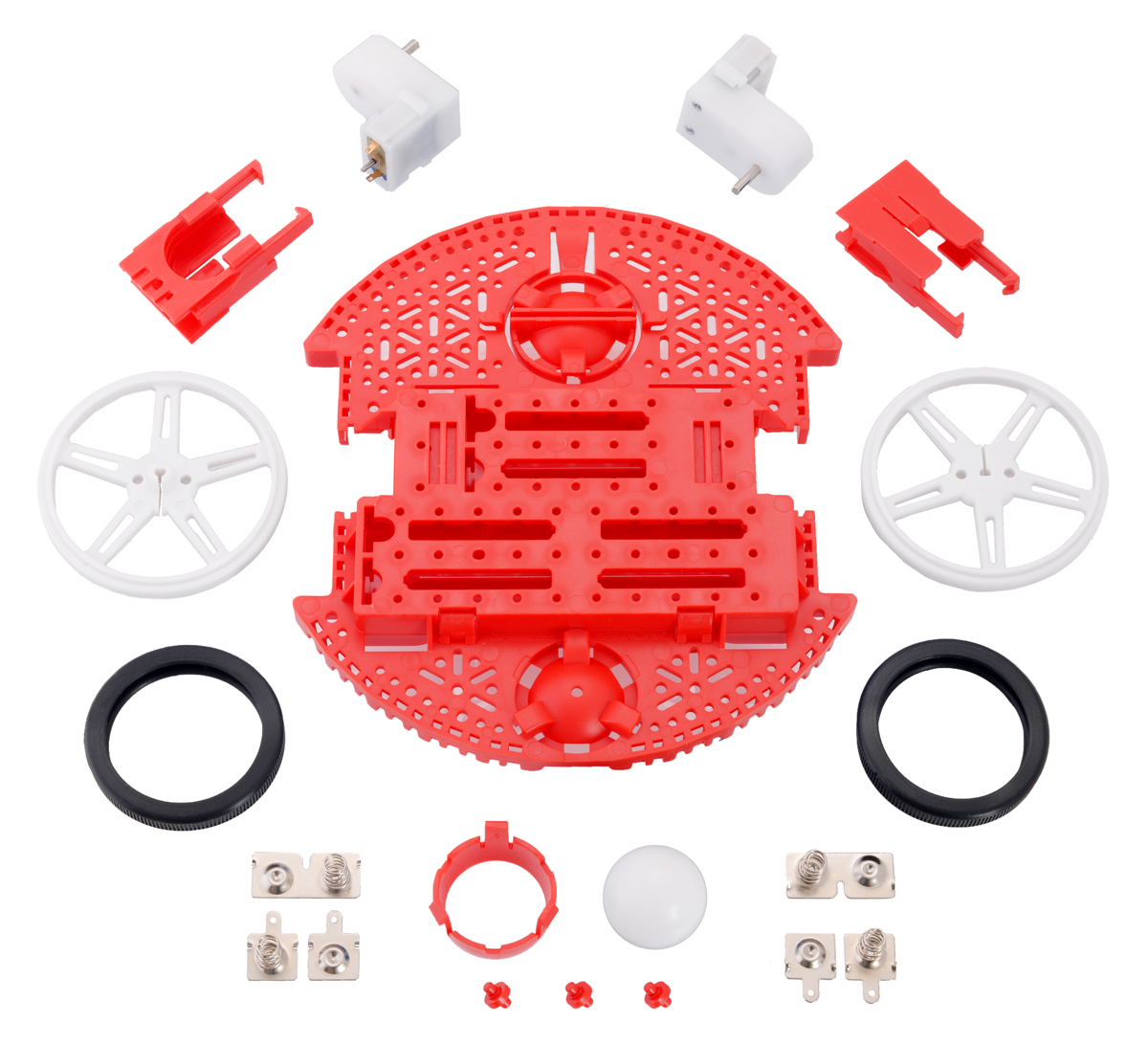
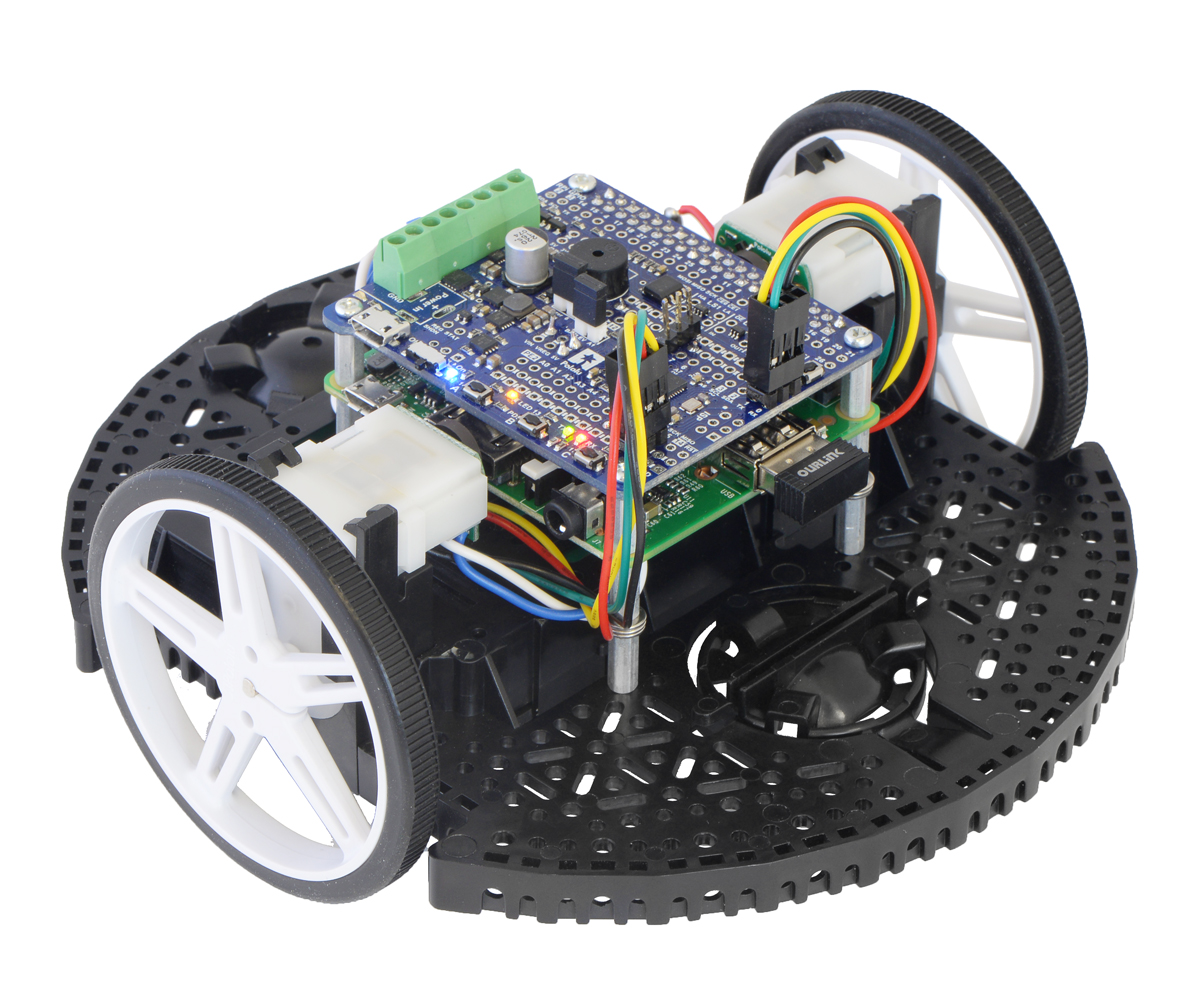
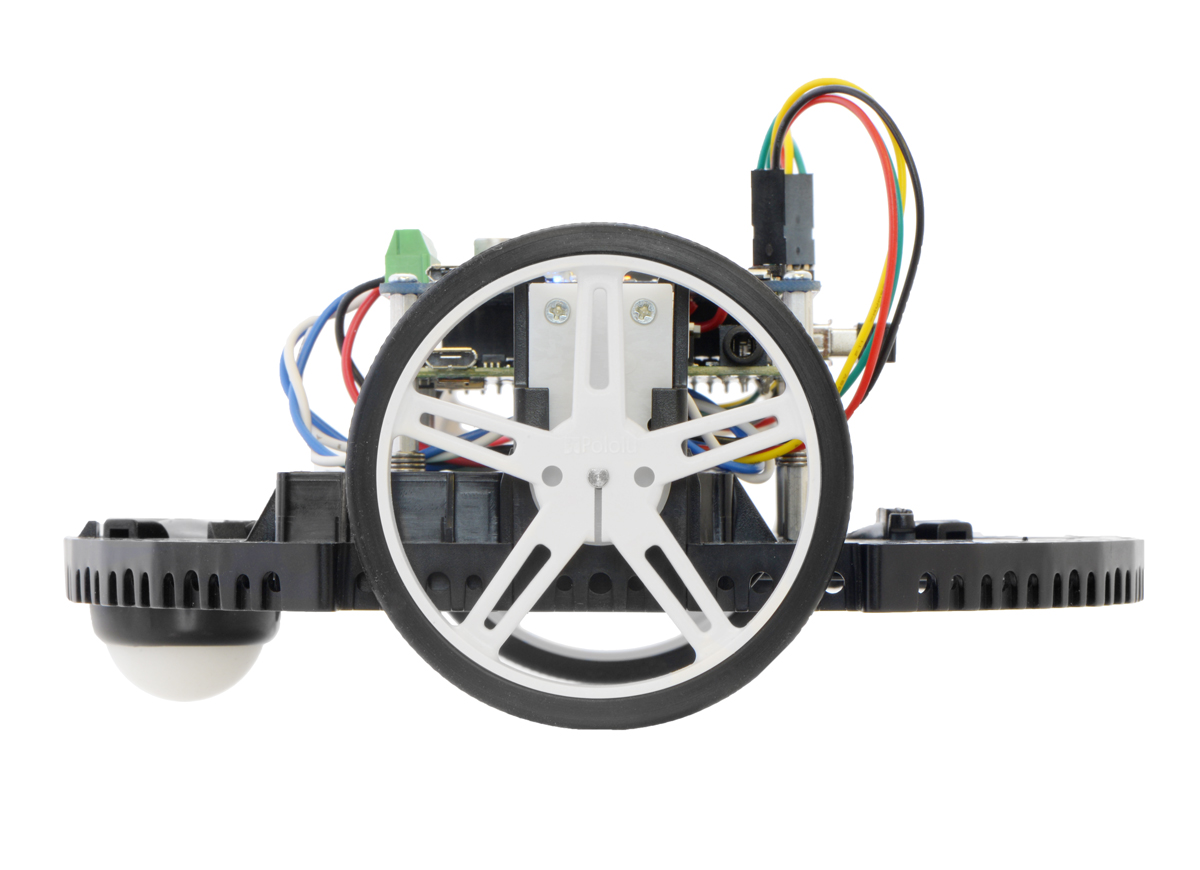
I am excited to announce the release of the Romi chassis, our new platform for mobile robotics. Romi is a 6.5″-diameter round chassis that includes all the basic mechanical parts that you need for a mobile robot: a base plate with integrated battery holder, motors and motor brackets, wheels with silicone tires, and a ball caster as a third point of contact.
 |
The Romi chassis is designed to be extended. It includes numerous mounting holes and slots, including specific spots for Arduino and Raspberry Pi and a place in front for a second ball caster. The motors have extended shafts for use with Romi encoders in applications requiring precision. For power, you can choose between four and six AA cells; we recommend the Romi power distribution board for access to battery power.
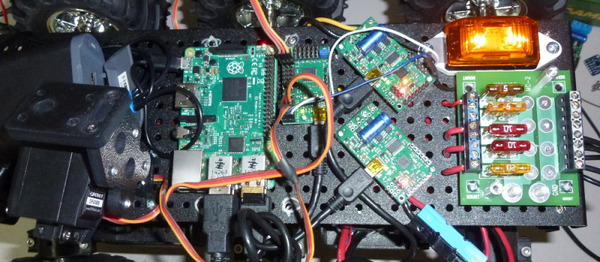
As an example of what you can do, here is the chassis with a Raspberry Pi A+ and our A-Star Robot Controller mounted on top, with power, motors, and encoders all fully connected and operational:
|
|
The chassis is available in six different colors, and if you want to mix and match, you can head over to our Romi Chassis Components category and select the parts you want.
Related products
Video: Smart lane changing Zumo robot
Forum member WaterBoy23 recently shared his robot which expanded upon the line following capabilities of our Zumo Robot for Arduino by adding in lane changing capabilities. The robot changes lanes when it detects a vehicle ahead of it, and is programmed to either pass the vehicle or return quickly to its original lane if it detects oncoming traffic. His robot uses two Arduino Uno boards, one for following the line and the other for reading ultrasonic position sensors. More information about the robot can be found in WaterBoy23’s post on our forum.
Related products

Pololu Labor Day weekend sale

We are having a big Labor Day sale throughout the weekend, with 15% discounts on over 800 products when you use the coupon code LABORDAY16. Note that we will be closed on Monday, so orders placed after 2 PM Pacific Time on Friday, September 2 will be shipped on Tuesday, September 6.
For more information, including all of the sale items, see the sale page.
New product: T1-3/4 (5mm) RGB LED with Diffused Lens (5-pack)
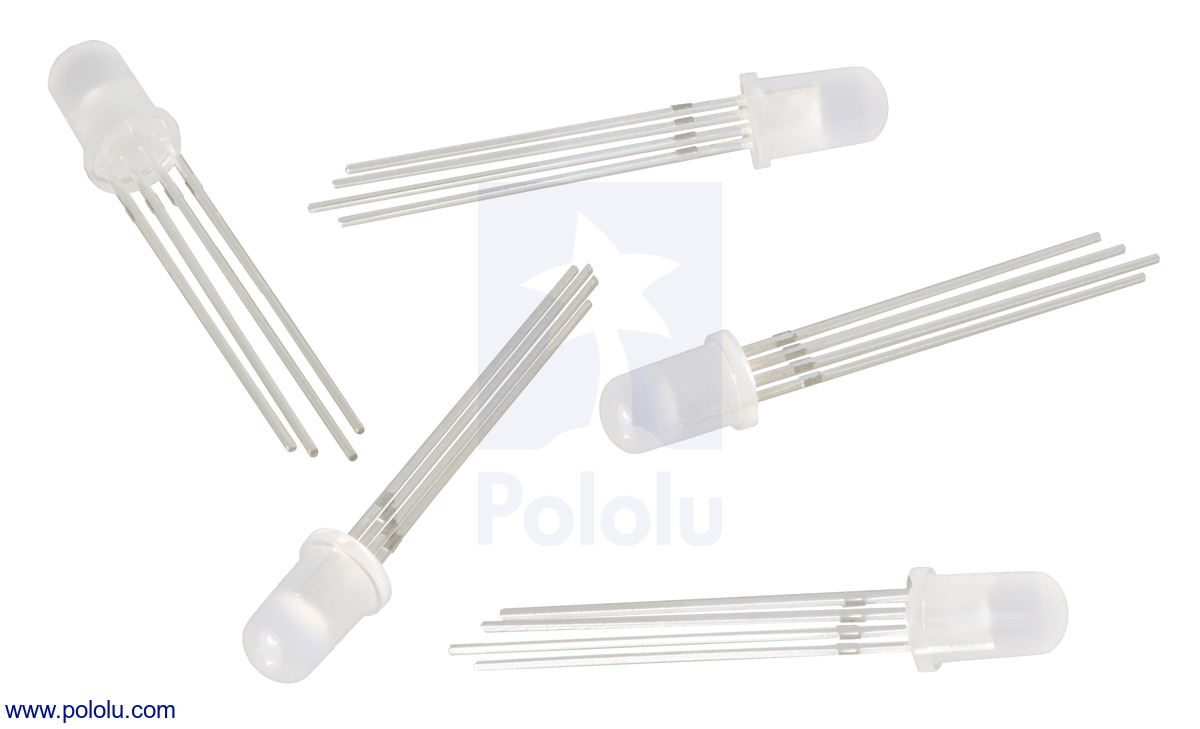 |
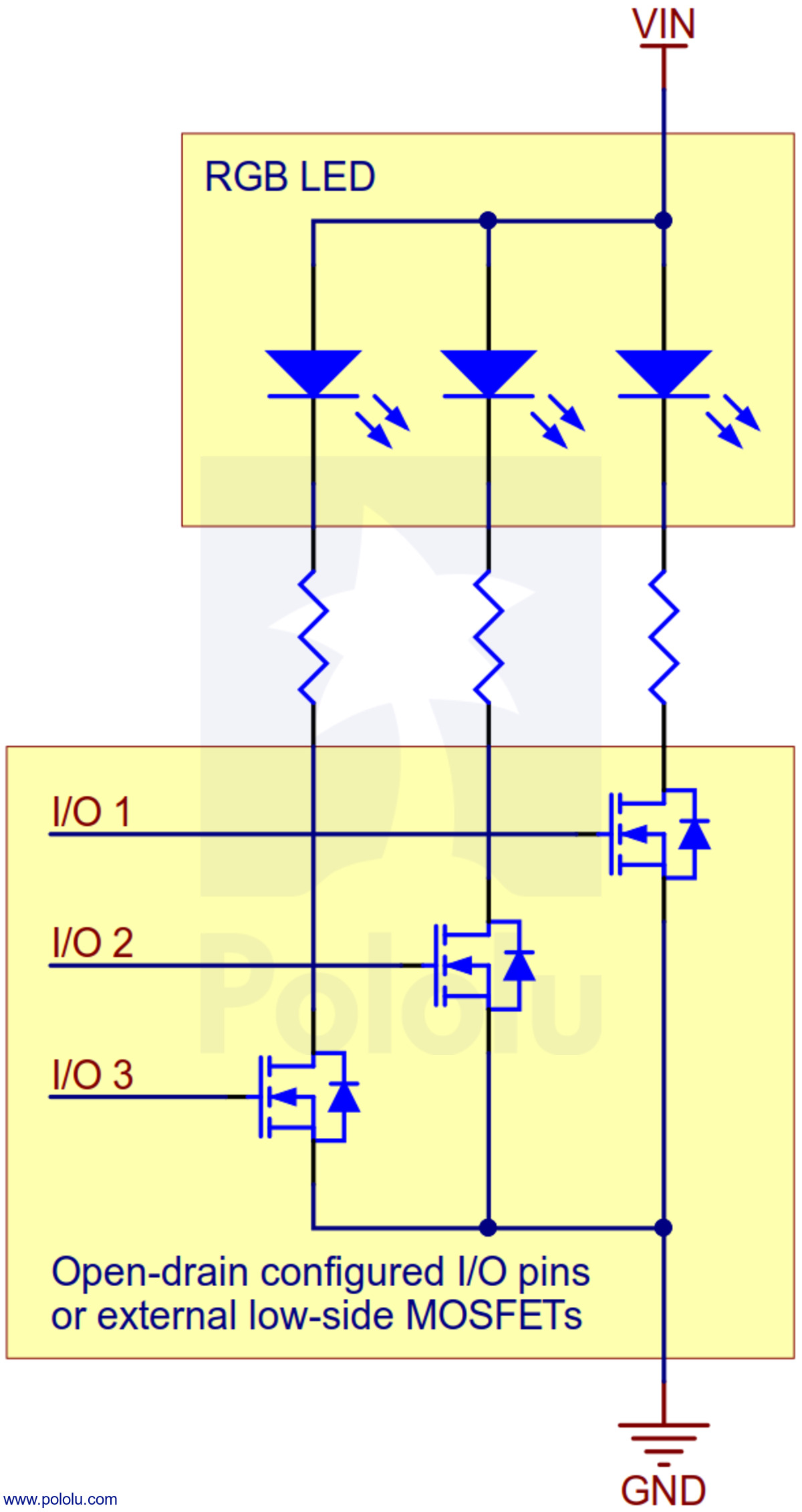
We are now selling T1-3/4 (5mm) common anode RGB LEDs! These multi-color LEDs contain red, green, and blue (RGB) elements that can be mixed to produce different colors. The three color elements share a common anode and are encased in a diffused white lens that blends the colors and widens the viewing angle. This product is a pack of five (5) RGB LEDs.
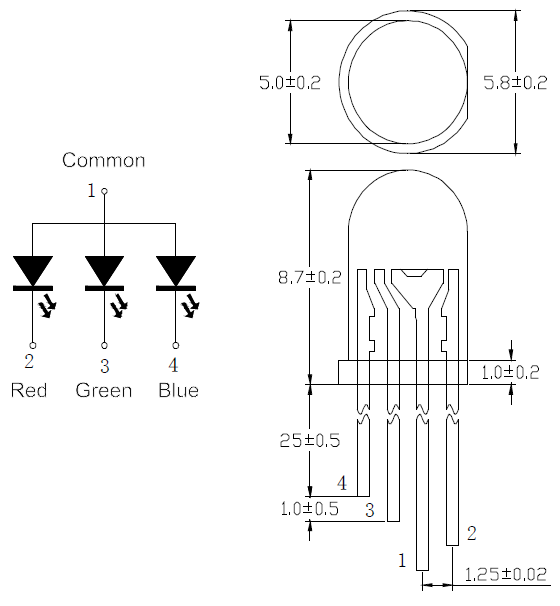 |
These LEDs replace the RGB LEDs with a common cathode that we used to sell. The common-anode setup of the new ones is nice because you can drive the LEDs with a low-voltage microcontroller I/O pin in an open-drain configuration (provided the pins can handle the current and are tolerant of the LED supply voltage). If you need to build your own drive circuit, you just need one low-side transistor per LED.
 |
Here are some other posts on our blog about LEDs:
Related products

New product: Magnetic Encoder Pair Kit for Mini Plastic Gearmotors
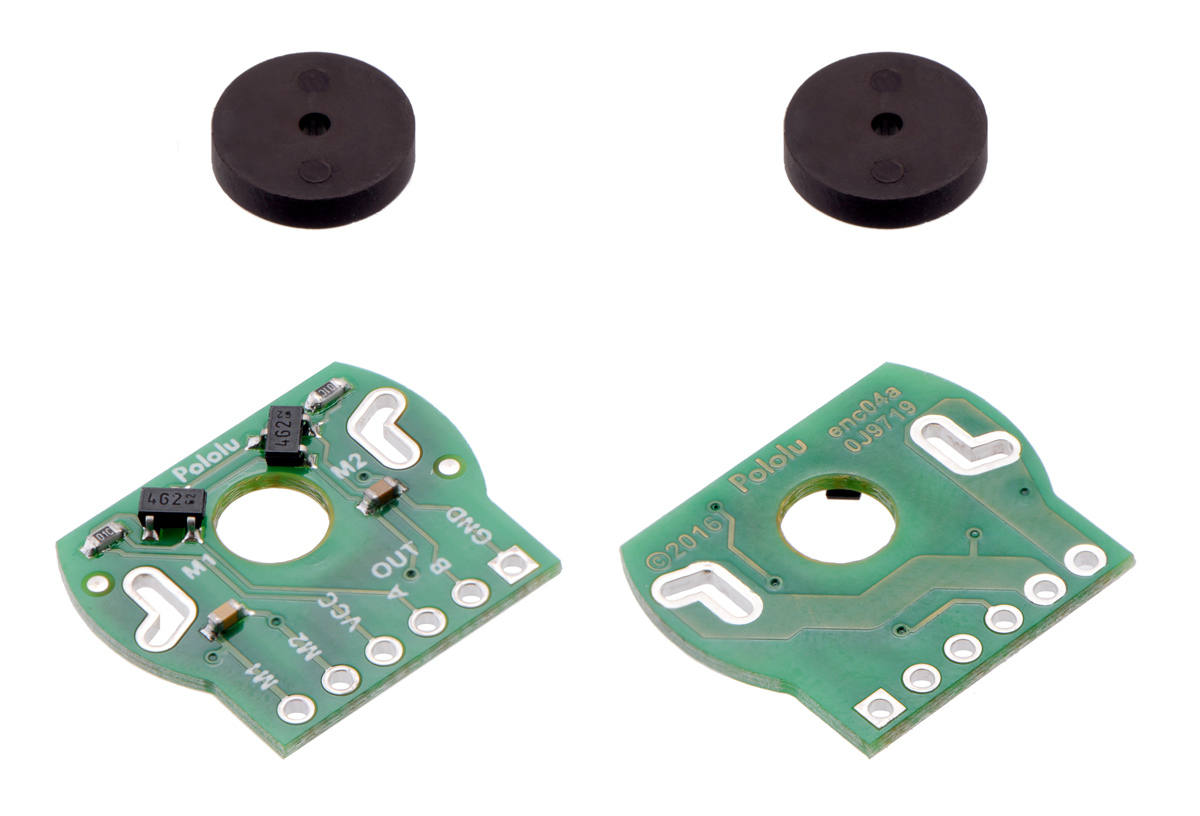 |
We now have a magnetic encoder pair kit available for our mini plastic gearmotors with extended back shafts. Like our encoder kit for micro metal gearmotors, these kits consist of Hall effect sensor boards that mount to the back of the motors and magnetic discs that fit on the motors’ back shafts. The encoders provide a resolution of 12 counts per revolution of the motor shaft (when counting both edges of both channels); in terms of counts per gearbox output shaft revolution, the resolution is multiplied by the corresponding gear ratio.
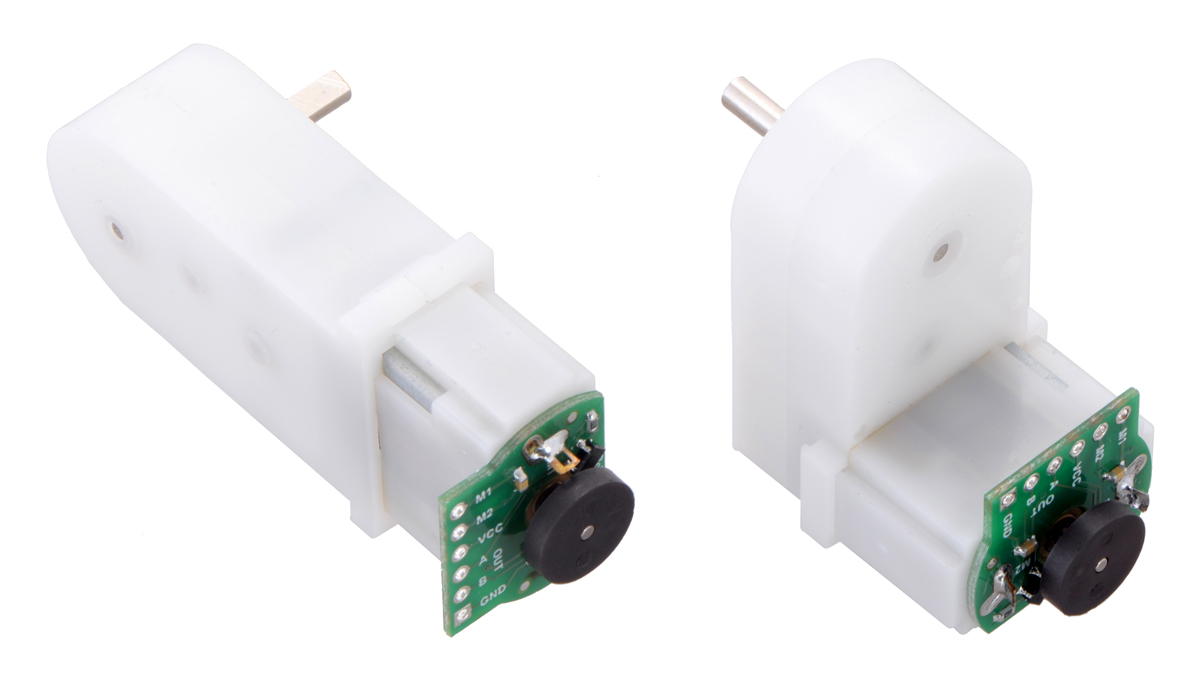 |
For more details about the encoder kit, see the product page.
Related products



A Raspberry Pi robot without a HAT
 |
Using an Arduino shield or Raspberry Pi add-on board is often a quick and convenient way to get started on a robotics project, but for maximum flexibility, nothing beats building your own system from standalone boards. Rud Merriam’s Hackaday article describes the design of his Raspberry Pi-controlled robot, for which he opted to use separate modules instead of daughterboards on the Pi, and mentions some of the trade-offs involved in making that decision.
The robot is built on a Wild Thumper chassis and uses a Maestro USB servo controller and two Simple Motor Controllers to interface the Raspberry Pi with the robot’s motors and actuators. In Rud’s writeup, he explains how he made use of some of the more advanced features of the Maestro and SMCs, like using servo channels for general-purpose I/O and setting up daisy-chained serial communications. Check out the full article for all of the details.
Related products



New product: VL53L0X Time-of-Flight Distance Sensor Carrier
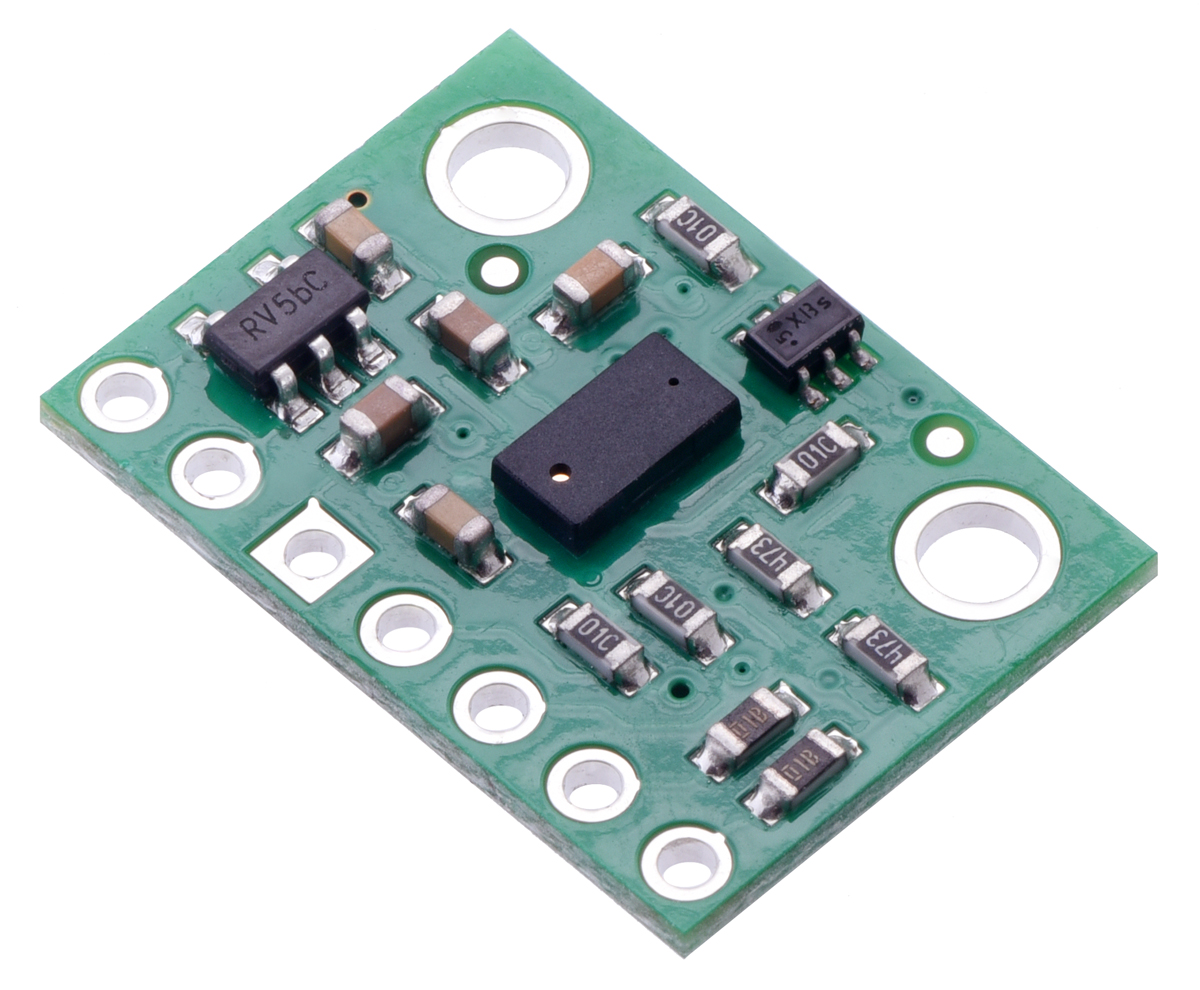 |
We’ve just released our VL53L0X Time-of-Flight Distance Sensor Carrier. With its ability to measure distances up to 2 m depending on configuration, target, and environment, the VL53L0X is a longer-range version of the VL6180X (but without ambient light sensing functionality) that operates using the same principles. This integrated lidar module times how long it takes for pulses of infrared light to reach a target, reflect off it, and arrive back at the sensor. It uses this information to report the range to the target with a resolution of 1 mm and accuracy as good as ±3%, minimizing the effect of the target’s reflectance on the measured distance.
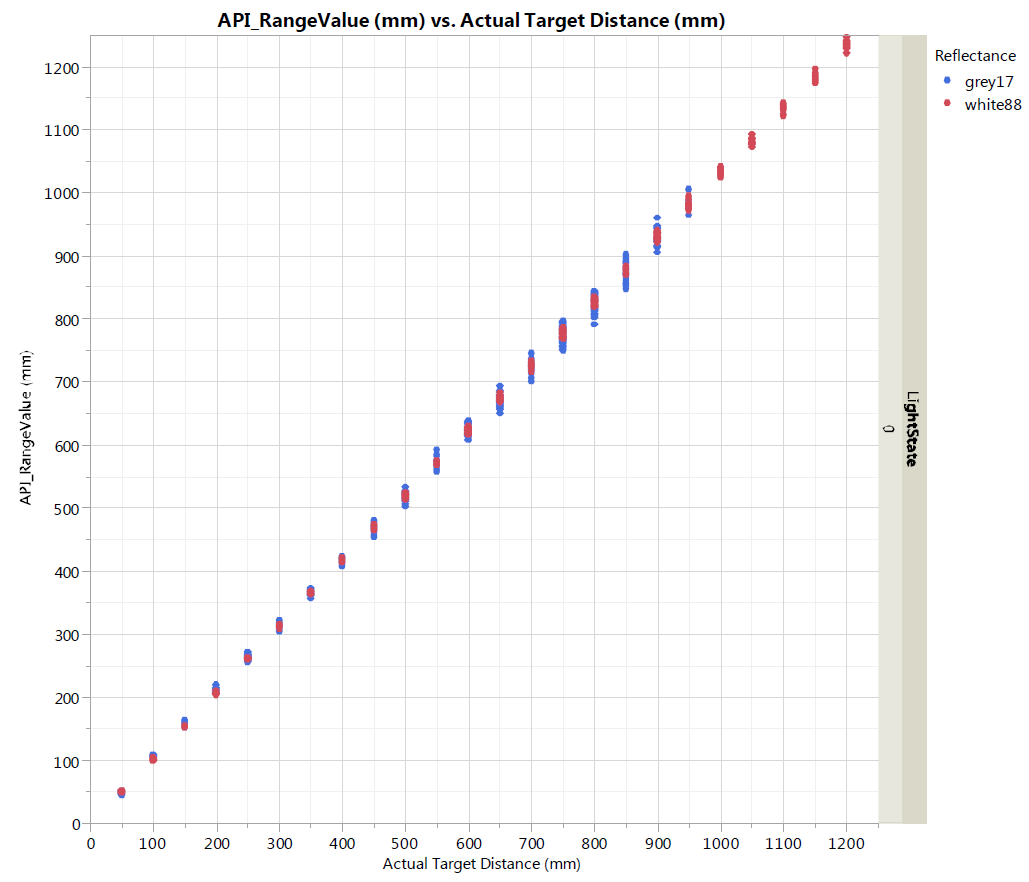 |
VL53L0X datasheet graph of typical ranging performance (in default mode). |
|---|
As usual, our breakout board adds a 2.8 V regulator and level shifters to help interface with 3.3 V and 5 V systems, as well as a breadboard-compatible pinout and mounting holes. We are also working on an Arduino library for the VL53L0X that we expect to release in the next few days.
For more information about the VL53L0X carrier, see its product page.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










