Pololu Blog »
Pololu Blog (Page 41)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Room mapping robot based on the Rover 5 chassis
This robot, created by theophil on Let’s Make Robots, uses a Rover 5 chassis with encoders, a MinIMU, sonar sensors, and a few expansion plates to do room mapping. Theophil modified the chassis to use Dagu Wild Thumper wheels, and made a custom 3D-printed adapter for connecting the wheels in a compact way. The program for the robot, which is available on GitHub, collects data from the sonar sensors about how far away objects are and creates a grayscale map where the darkness of a pixel corresponds to the robot’s confidence that an obstacle exists in that spot.
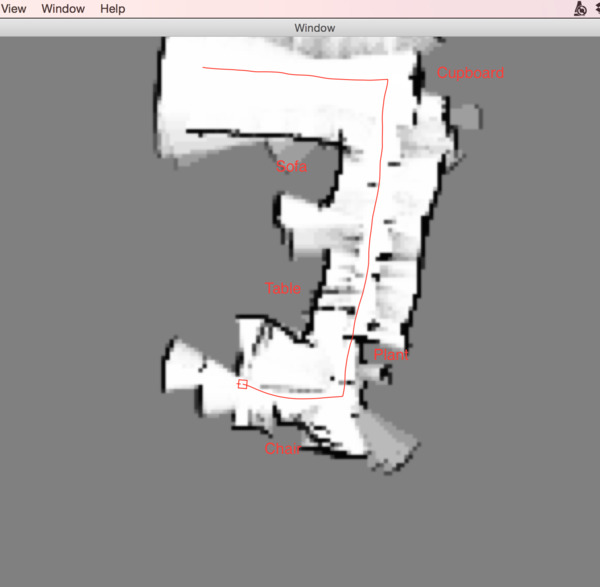 |
Example map made by theophil’s mapping rover. |
|---|
The program also includes a movement algorithm meant to drive the robot along paths that take it close to many obstacles to increase the accuracy of the sonar sensors. More about theophil’s room mapping robot can be found in his Let’s Make Robots post.
Related products






Building a Raspberry Pi robot with the A-Star 32U4 Robot Controller
In this post I will show you how to build an expandable robot platform based on a Raspberry Pi and an A-Star 32U4 Robot Controller. With this platform, the powerful Raspberry Pi can take care of high-level tasks like motion planning, video processing, and network communication, while the A-Star, which mounts to the Pi’s GPIO header, takes care of actuator control, sensor inputs, and other low-level tasks that the Pi is incapable of. The total cost of the parts I used is about $120. Continued…
3D-printed mecanum wheel rover
One of our forum members, gchristopher, posted about his 3D-printed mecanum wheel rover. The rover uses our D24V10F5 5V regulator and some of our TB6612FNG dual motor drivers.
You can find more information on his blog. Additionally, you can find the CAD files on the Thingiverse page, and his original forum post on our forum.
Related products


New product: A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge
 |
Our A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge is now available, joining the LV version we released six months ago.
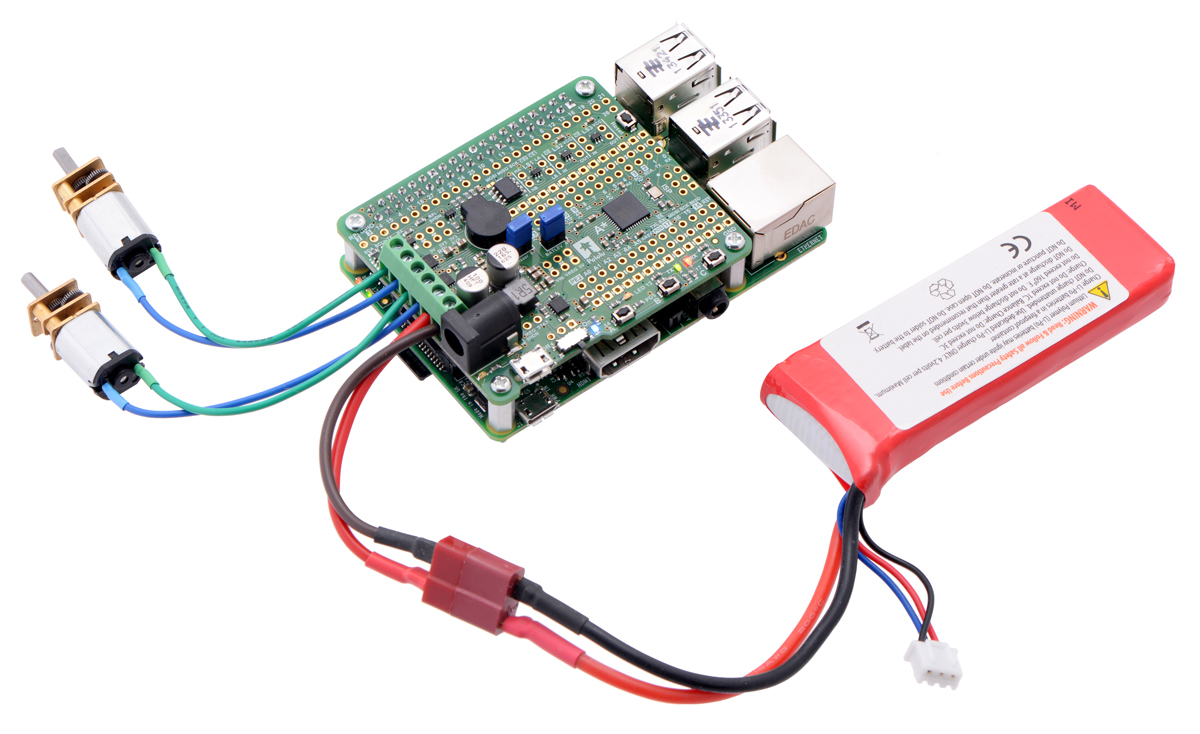
Similar to its lower-voltage sibling, the Robot Controller SV is a general-purpose robot controller that includes dual motor drivers and other useful peripherals like pushbuttons and a buzzer. It also has the same level shifters and power circuit that allow it to easily power and communicate with a Raspberry Pi when mounted as an auxiliary controller. Like our other A-Star controllers, the A-Star Robot Controller SV built around an ATmega32U4 microcontroller and ships preloaded with an Arduino-compatible USB bootloader.
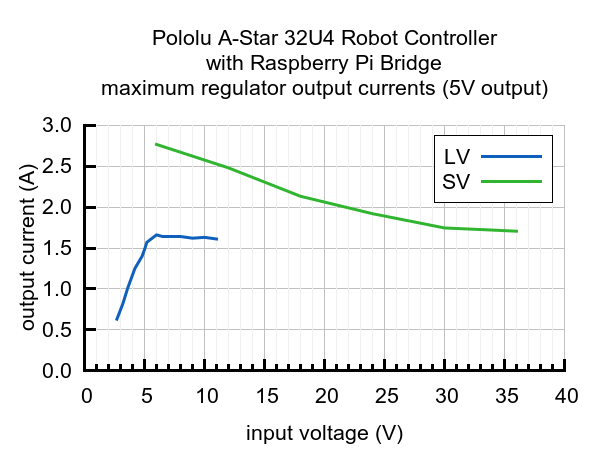
This SV version of the A-Star Robot Controller uses an efficient step-down switching regulator, enabling it to operate (and optionally supply power to an attached Raspberry Pi) with input voltages from 5.5 V to 36 V. Compared to the LV version, the Robot Controller SV can also supply substantially more current across its wide operating voltage range:
 |
We’ve been working on some (long-awaited) I²C software to allow the A-Star to be used as a slave controller with a Raspberry Pi master, as well as an example project that shows how to build a robot with this setup. They’re nearly ready, so watch for them on the blog in the coming weeks. But don’t forget that the A-Star board can also be used by itself as a capable robot controller, as my recent sumo robot demonstrates.
To facilitate both of these uses, the A-Star 32U4 Robot Controller SV is available either assembled for use as a Raspberry Pi add-on or in a more barebones configuration that is suitable for customized assembly or standalone use. See those product pages and the user’s guide for more information about the robot controller.
Related products




New products: MinIMU-9 and AltIMU-10 v5 IMU boards
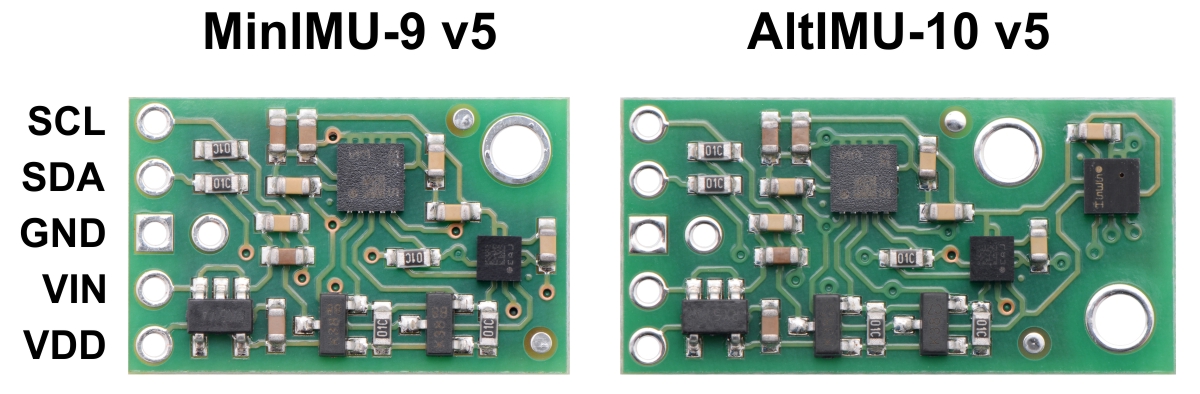 |
We have released new versions of our MinIMU-9 and AltIMU-10 inertial measurement unit (IMU) modules, which use an I²C interface to provide nine independent rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s absolute orientation (the AltIMU also includes an altimeter). These v5 editions feature ST’s new LIS3MDL 3-axis magnetometer and LSM6DS33 3-axis accelerometer and gyro, which allow them to offer improved performance over previous versions at lower prices. The new versions are pin-compatible with the previous ones, though software written for older IMU versions will need to be changed to work with the v5 since the sensor ICs have changed.
We think these new boards combine the best ST MEMS sensors into compact boards at great prices. However, our older MinIMU-9 v3, AltIMU-10 v3, and AltIMU-10 v4 are still available for now at reduced clearance prices, so if you don’t absolutely need ST’s newest sensors on your IMU, these previous versions are still very good sensor boards to consider.
Here’s an updated version of our diagram showing where the new v5 modules fit in:
 |
Evolution and release dates of Pololu carriers for ST’s MEMS sensors through January 2016. |
|---|
Related products






Grant's mini sumo robot: Rattata

Remember my super cool sumo robot? My sumo robot is different from regular sumo robots. It’s like my sumo robot is in the top percentage of mini sumo robots. Continued…
Video: Phone-controlled BB8 droid build tutorial
TechBuilder’s life-size phone-controlled BB8 droid uses a Pololu dual VNH5019 motor driver shield to drive two 19:1 37D metal gearmotors.
For step-by-step instructions for building this droid, see his DIY BB8 Instructables page.
Video: Rubik's Cube-solving robot
This “World’s Fastest” Rubik’s Cube-solving robot uses six DRV8825 stepper motor driver carriers, one for each face.
New products: 12V 25D mm gearmotors with encoders
|
|
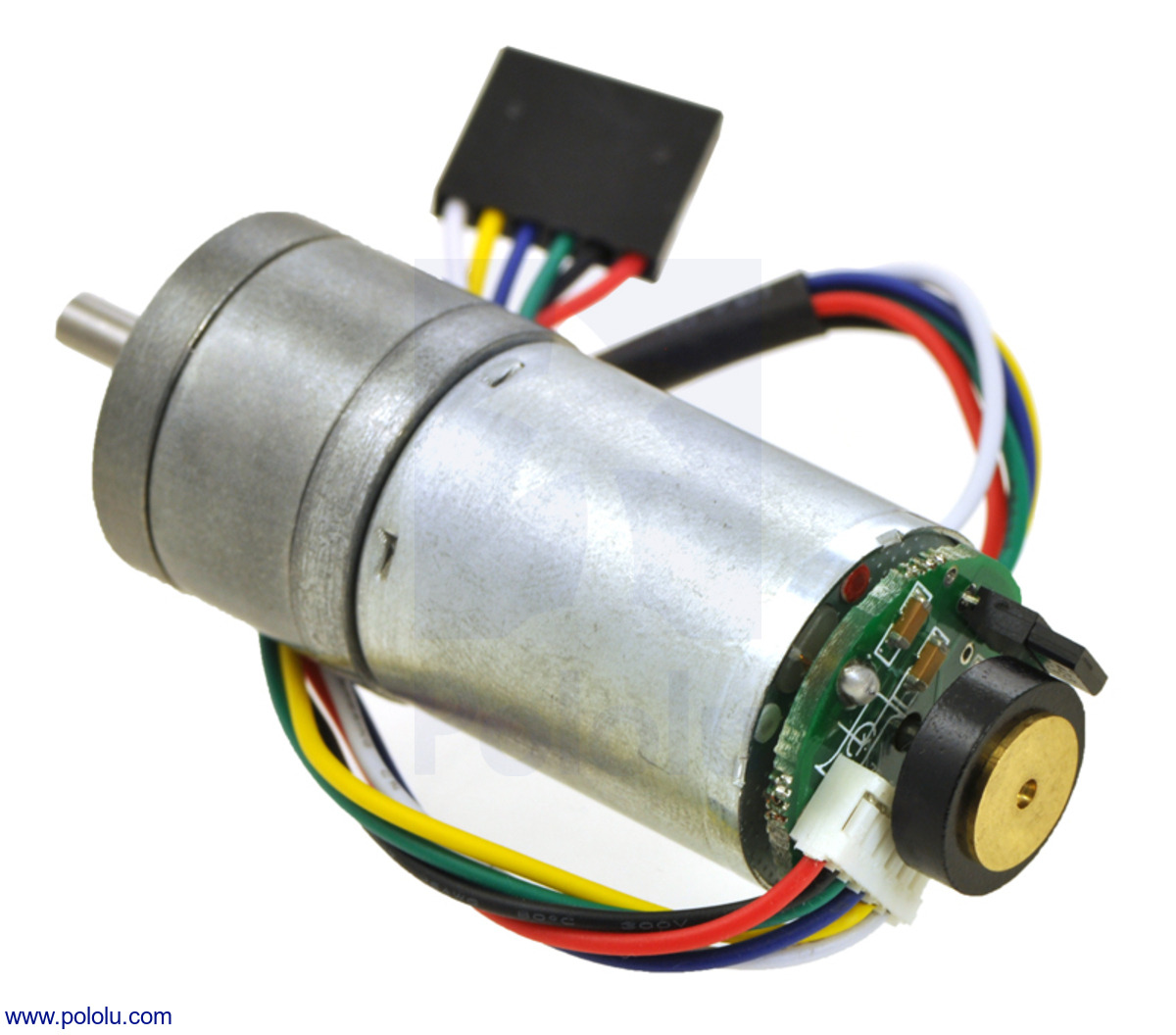

All of our 25D mm metal gearmotors, including the newest versions with 12V motors, are now available with quadrature encoders. That’s 37 new products in all! With five different motor winding options and gear ratios available from 4.4:1 through 499:1, our total selection of 25D mm metal gearmotors has grown to nearly 100 options:


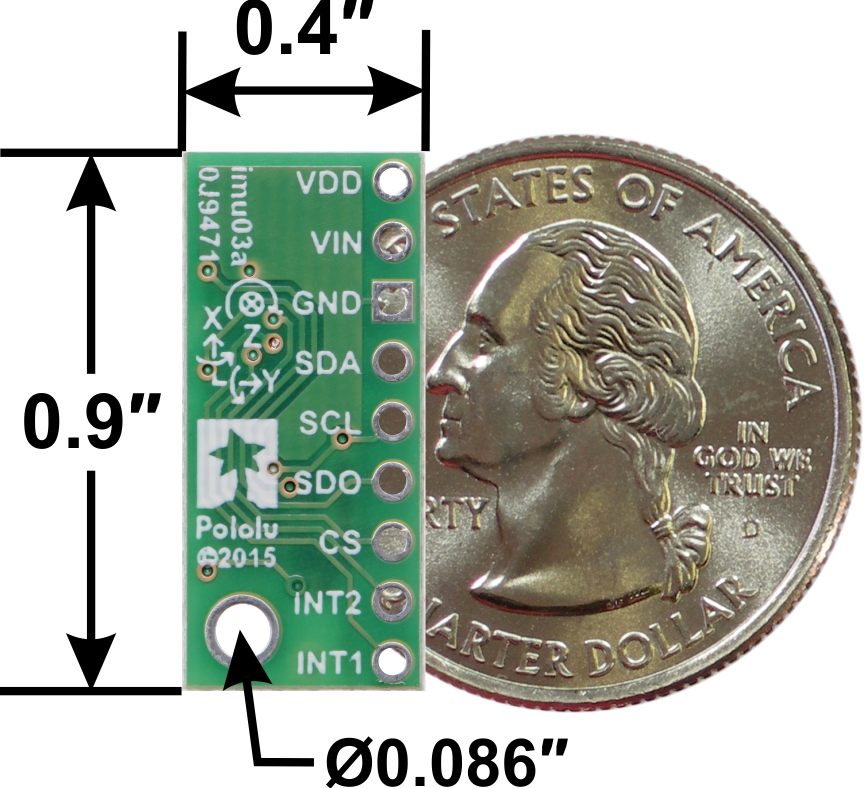
New products: LSM6DS33 accelerometer/gyro and LIS3MDL magnetometer carriers
|
|

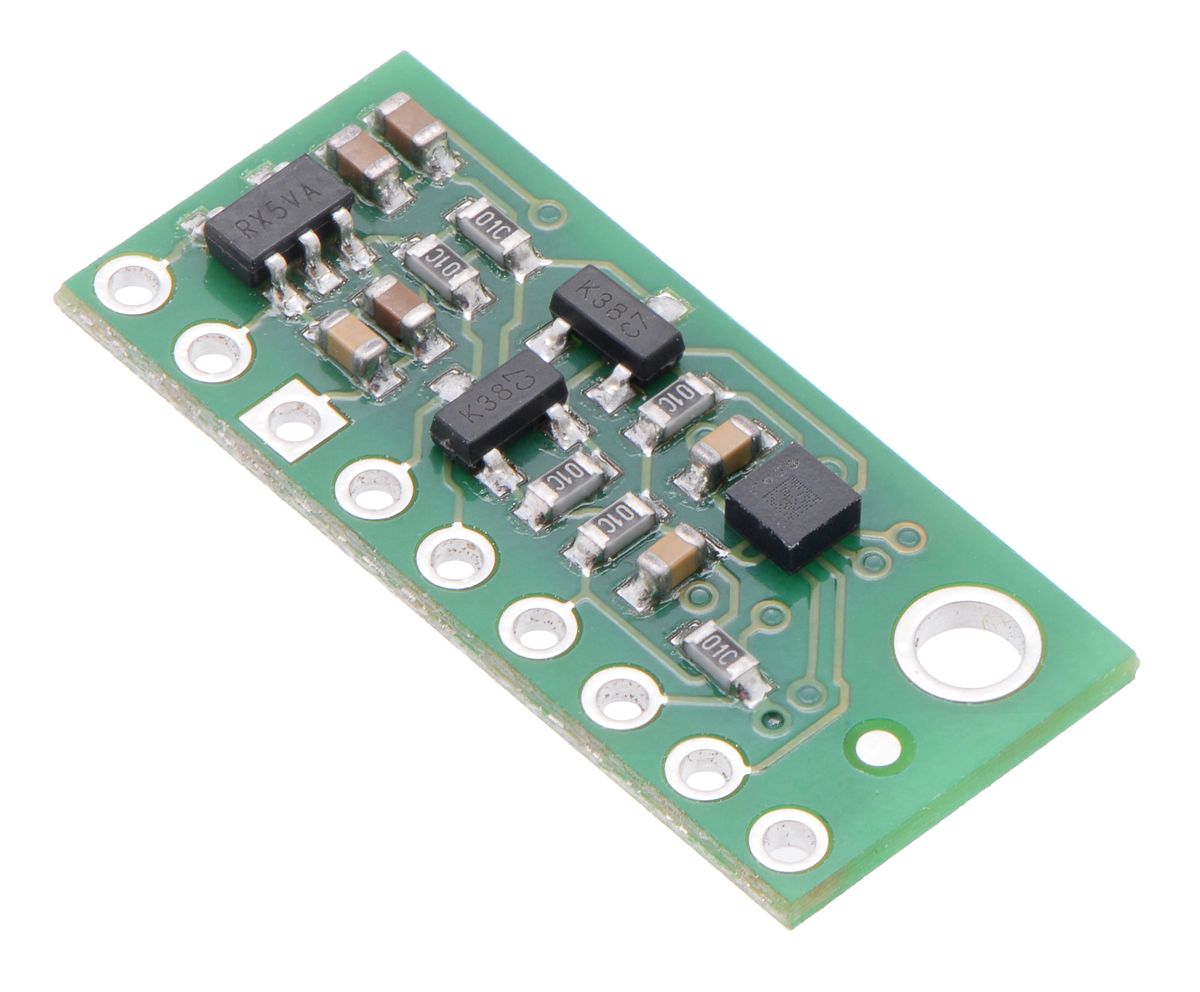
We’re getting 2016 started with the release of two new products: an LSM6DS33 3D accelerometer and gyro carrier and an LIS3MDL 3-axis magnetometer carrier.
As with other ST sensors, these chips can be configured and read through I²C or SPI interfaces, and our compact breakout boards incorporate voltage regulators and level shifters to make them easier to use with 5 V systems. Compared to the inertial and magnetic sensors we’ve used previously (most recently the LSM303D accelerometer and magnetometer and the L3GD20H gyro), these two new ICs offer different combinations of capabilities: the LSM6DS33 integrates an accelerometer and rate gyroscope into a single package, while the LIS3MDL is a standalone magnetometer.
|
|
For more information about these boards, see their product pages at the links below.
Related products


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










