Pololu Blog »
Room mapping robot based on the Rover 5 chassis
This robot, created by theophil on Let’s Make Robots, uses a Rover 5 chassis with encoders, a MinIMU, sonar sensors, and a few expansion plates to do room mapping. Theophil modified the chassis to use Dagu Wild Thumper wheels, and made a custom 3D-printed adapter for connecting the wheels in a compact way. The program for the robot, which is available on GitHub, collects data from the sonar sensors about how far away objects are and creates a grayscale map where the darkness of a pixel corresponds to the robot’s confidence that an obstacle exists in that spot.
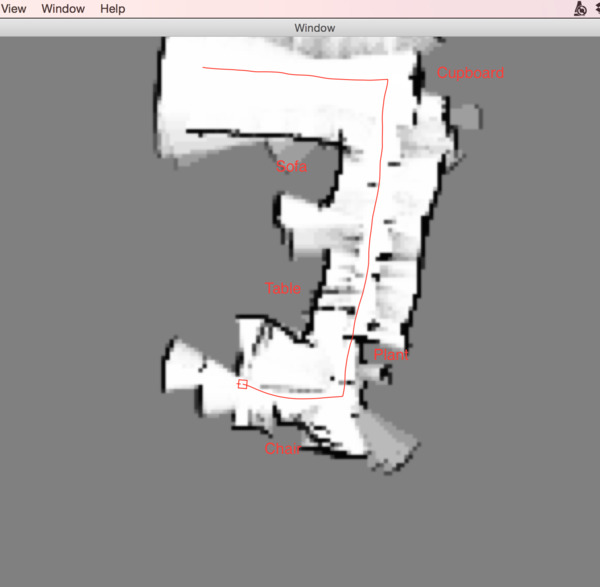 |
Example map made by theophil’s mapping rover. |
|---|
The program also includes a movement algorithm meant to drive the robot along paths that take it close to many obstacles to increase the accuracy of the sonar sensors. More about theophil’s room mapping robot can be found in his Let’s Make Robots post.
Related products






-

Building a Raspberry Pi robot with the A-Star 32U4 Robot Controller
- 16 February 2016In this post I will show you how to build an expandable robot platform based on a Raspberry Pi and an A-Star 32U4 Robot Controller. With this...
-

New products: G2 High-Power Motor Driver 18v25 and 24v21 (and price drops for other G2 drivers)
- 3 March 2016Our second-generation family of high-power motor drivers continues to grow with the release of our G2 High-Power Motor Driver 18v25 and G2...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
