Pololu Blog »
Posts tagged “lvbots”
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Video: LVBots May 2018 line following competition
LVBots held a line following competition at Pololu on May 24th. This time we had our “classic” line following course like in previous competitions, and an “advanced” course with gaps, intersections, tighter turns, and shortcuts. Continued…
Pololu and LVBots CES Open House 2018
 |
Are you attending CES or in Las Vegas on Wednesday, January 10th? You can join Pololu and LVBots any time from 5 p.m. to 8 p.m. for CES Open House 2018! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide food. Registration and other details are on the LVBots Meetup page.
Pololu and LVBots CES Open House 2017
|
Are you attending CES or in Las Vegas this Friday evening? You can join Pololu and LVBots on January 6 any time from 5 p.m. to 8 p.m. for CES Open House 2017! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide pizza. Registration and other details are on the LVBots Meetup page.
Grant's mini sumo robot: Rattata

Remember my super cool sumo robot? My sumo robot is different from regular sumo robots. It’s like my sumo robot is in the top percentage of mini sumo robots. Continued…
Pololu and LVBots CES Open House 2016
|
Are you attending CES or in Las Vegas this Thursday evening? You can join Pololu and LVBots on January 7 any time from 5 p.m. to 8 p.m. for CES Open House 2016! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide pizza. Registration and other details are on the LVBots Meetup page.
Patrick's mini sumo robot: Covert Ops

Hi, my name is Patrick. I am an engineering intern at Pololu and am studying at the University of Nevada, Las Vegas to earn a mechanical engineering degree. I decided to build a custom robot to compete in the recent LVBots mini-sumo competition here at Pololu. It was my first competition at LVBots. I started out by watching a compilation video of the previous sumo competition at LVBots since I had never competed in a mini-sumo competition before. My goal was to create a robot that could out maneuver other robots and had as few vulnerabilities as possible. To achieve this goal, I decided to build a robot that would be high speed and able to push opponents from both sides of the robot with a lot of force. The result of my efforts is the robot I call Covert Ops. Continued…
Kevin's mini-sumo robot: Roku
My robot, Roku, was the champion of LVBots’ August mini-sumo competition. While I didn’t have the time or inspiration to make it look like anything more interesting (like a Star Wars droid) or make use of especially innovative tactics, I think I managed to build a robot that not only is effective but also looks fairly clean and well put together. In addition, it’s a good demonstration of how the Pololu A-Star 32U4 Robot Controller can be used as a standalone main board for a small robot. Continued…
Brandon's mini sumo robot: Black Mamba
Before I started designing my entry into this year’s LVBots mini sumo competition, I watched several videos of other competitions. I noticed a majority of the victories came from engaging the opponent from the side or back; a pattern I also noticed during the last LVBots mini sumo competition. For that competition, I made a robot that used a blade and sensors on the front and back of the robot (basically making the robot have two fronts and no back). However, my strategy in that competition was to roam the ring and search for the opponent, which I suspect increased the chances of the opponent engaging from a suboptimal angle. This time, I wanted to try having my robot spin in place looking for the opponent and striking once it was found. This ultimately resulted in my newest mini sumo robot, Black Mamba. For those unfamiliar, a black mamba is a snake with a reputation for being highly aggressive and is one of the longest and fastest-moving snakes in the world. A black mamba’s venom is highly toxic, and it is capable of striking at considerable range, occasionally delivering a series of bites in rapid succession. Black Mamba is also Kobe Bryant’s self-appointed nickname (yes, I am a Lakers fan). Continued…
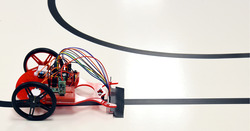
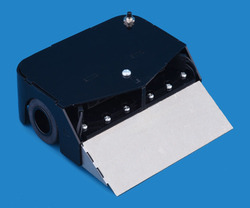
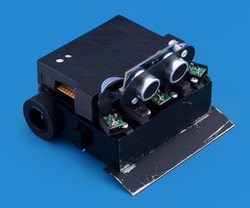
Sumo ring border angle detection
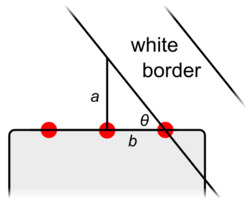
My robot from the last LVBots mini-sumo competition has a feature which I think is pretty interesting and sets it apart from a lot of other robots: when it detects the border of the sumo ring, it measures the angle of the border and uses that information to try to get to the center. Continued…
Video: LVBots August 2015 mini-sumo competition
LVBots held a mini-sumo competition at Pololu on August 20. The goal of mini-sumo is to make an autonomous robot that pushes the other robot out of a 30″ ring, but this is not BattleBots: the robots cannot be controlled by a human, and they are not supposed to damage one another. Eighteen robots faced off in our head-to-head double elimination tournament. The video above shows some of the more entertaining matches and the full results of the contest.
The robots have become more sophisticated since our previous mini-sumo competition. Our new Zumo 32U4 Robot, which came out in the meantime, improves on the Zumo Robot for Arduino by adding IR sensors and encoders. This allowed some entries to do well just by programming a Zumo 32U4 robot (for example David’s Zumo Red). Also, people generally have gotten better at fabricating and programming their robots. Some people used 3D CAD programs to design 3D-printed and laser-cut chassis.
Kevin’s Roku won the competition, with the consensus being that Kevin won because he did not have enough time to make a gimmicky robot (like his line following hovercraft). His compact design used our new A-Star 32U4 robot controller and Sharp GP2Y0A60SZ 10 to 150 cm analog distance sensors, which kept the wiring minimal and the sight range long. Ben’s robot, The Big Ben, was unchanged since competing in the previous contest, yet it managed to do much better this time around, taking second place (though Brian was operating the robot in Ben’s absence, so he might want to claim some of the credit). Paul’s reigning champion, Paul Sumo 2, took third place despite also remaining unchanged since the last competition.
 |
Update: Here are posts about some of the robots in the contest:
- Grant’s mini sumo robot: Rattata
- Patrick’s mini sumo robot: Covert Ops
- Kevin’s mini-sumo robot: Roku
- Brandon’s mini sumo robot: Black Mamba
Are you in the Las Vegas area? Check out the LVBots Meetup page to get involved.
Related products






Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










