Pololu Blog » Posts tagged “lvbots” »
Posts tagged “lvbots” (Page 4)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
LVBots March 2014 dead reckoning competition
On March 6, LVBots held another competition at Pololu. This time, it was a dead reckoning contest: each robot had to find a line course and follow it to its end while keeping track of its position, then try to return to its starting position without any external navigational aids. Scoring was based on how close to the starting position the robot ended up, as well as how quickly it got there. The complete rules are available here (23k pdf). You can see a selection of the entries in this video compilation from the contest.
David has already posted about his entry. My robot was R2-DR, the miniature astromech droid, and I’ll be writing a post about it soon, too.
Are you in the Las Vegas area? Check out the LVBots Meetup page and drop by this Thursday, March 20, to see the robots in person!
Updates: You can read more about each of our robots in these blog posts:
- David and Fang’s dead reckoning robot based on the mbed LPC1768
- Brandon’s dead reckoning robot
- R2-DR, Kevin’s dead reckoning robot
- Claire’s dead reckoning robot
- Paul’s dead reckoning robot
- Jon’s dead reckoning robot
- Jamee’s dead reckoning robot
David and Fang's dead reckoning robot based on the mbed LPC1768
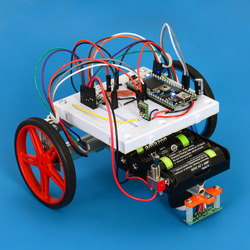
Several people here at Pololu made robots to compete in the LVBots dead reckoning competition last week. This post is about the robot I made along with another engineer here.
Dead reckoning is the process of continuously calculating your position using internal sensors that tell you something about what speed and direction you are going. In our dead reckoning competitions, robots demonstrate that they are capable of dead reckoning by following a long, twisting line drawn on the floor and then driving back to their starting point. The line functions as a user interface that directs the robots through a sequence of moves for which it was not preprogrammed. The robots are scored based on the time they took and how close they were to the starting point at the end. Continued…
Highlights from the LVBots September 2013 mini-sumo competition
LVBots held a mini-sumo competition at Pololu on September 19. With a total of 19 robots participating, we got to see a lot of different strategies, from passive to aggressive to deliberately misleading. Sensing technology was of key importance, with robots using everything from sonar and optical rangefinders to accelerometers. See the range of designs for yourself in this video compilation from the contest:
Do you live in Las Vegas, or are you passing through? Stop by this evening to see the robots in person! You can find out more about LVBots or sign up on our Meetup page.
Featured link: http://www.youtube.com/watch?v=biiSHoyjBzY


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










