Pololu Blog »
Pololu Blog (Page 34)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Steel custom laser cutting available
 |
We’ve been offering quick-turn custom laser cutting service ever since “we” were just Candice and Jan operating a tabletop Epilog out of their home. Since then we’ve cut a wide assortment of customer designs including jewelry, engraved control panels, robot chassis, Christmas ornaments, and wedding invitations.
We started out mostly cutting acrylic, gradually moving into cutting a wider variety of plastics and wood. All along we’ve been improving our processes and increasing our capabilities by buying machines with bigger beds, better control systems, and more power. Without announcing it officially, we’ve been cutting metal for customers and ourselves over the past few years. For example, we cut our Basic Sumo Blade for the Zumo Chassis and the SMT stencils for our in-house electronics assembly. We’ve been refining our metal cutting processes and finding the best cut settings to minimize the chance of burring and dross, so most parts come out relatively clean and smooth to the touch.
The process quality has gotten to the level where we are comfortable announcing that metal laser cutting is generally available to customers!
|
|
|
||||||
|
|
|
||||||
|
|
|
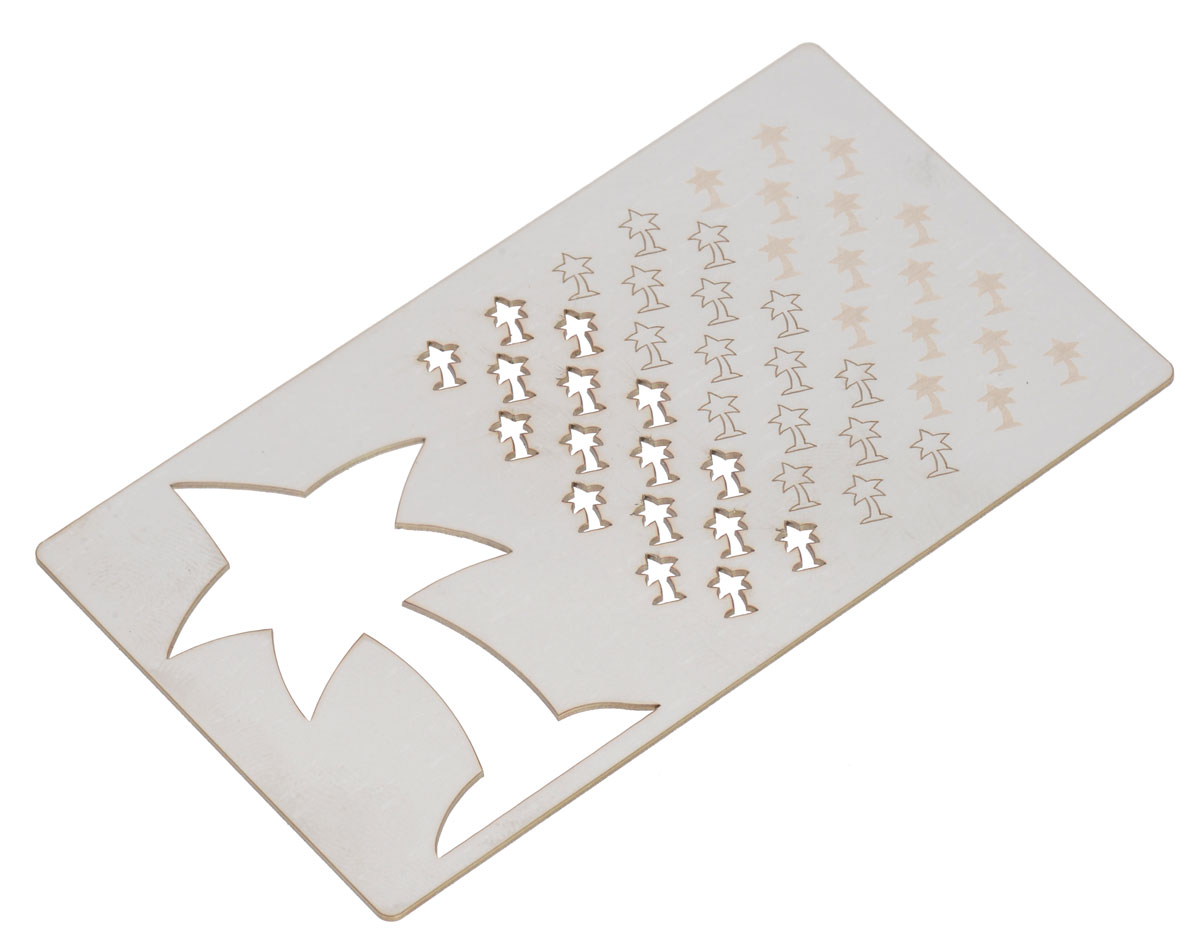
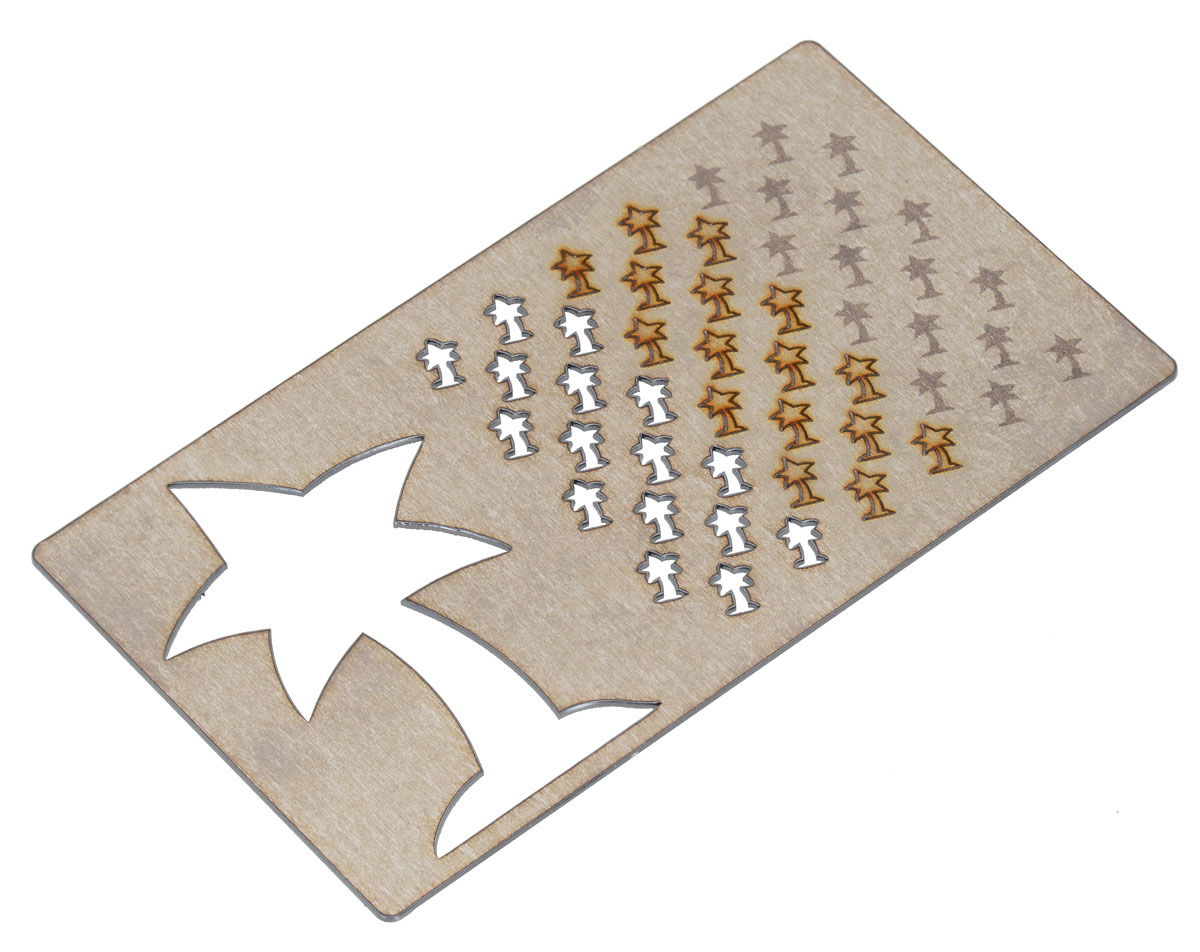
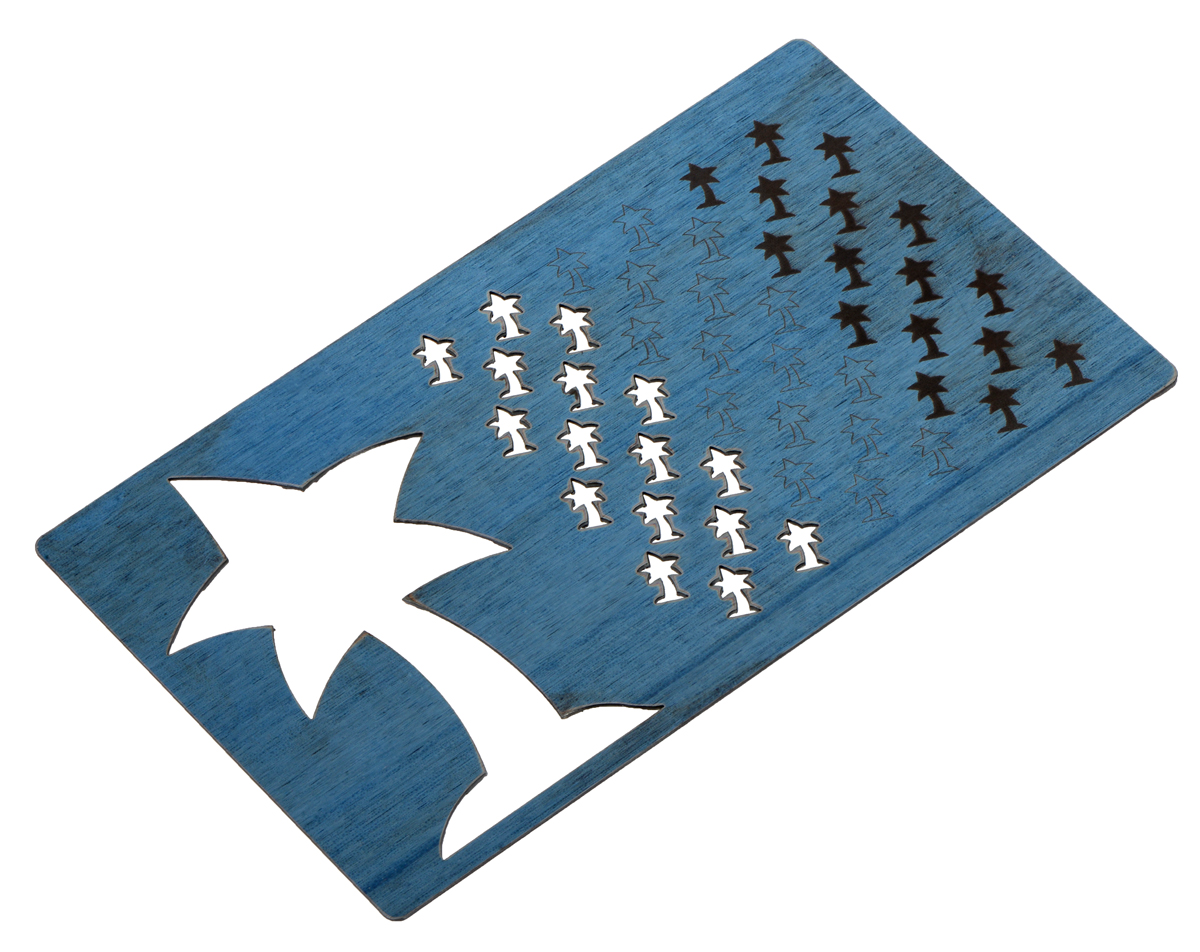
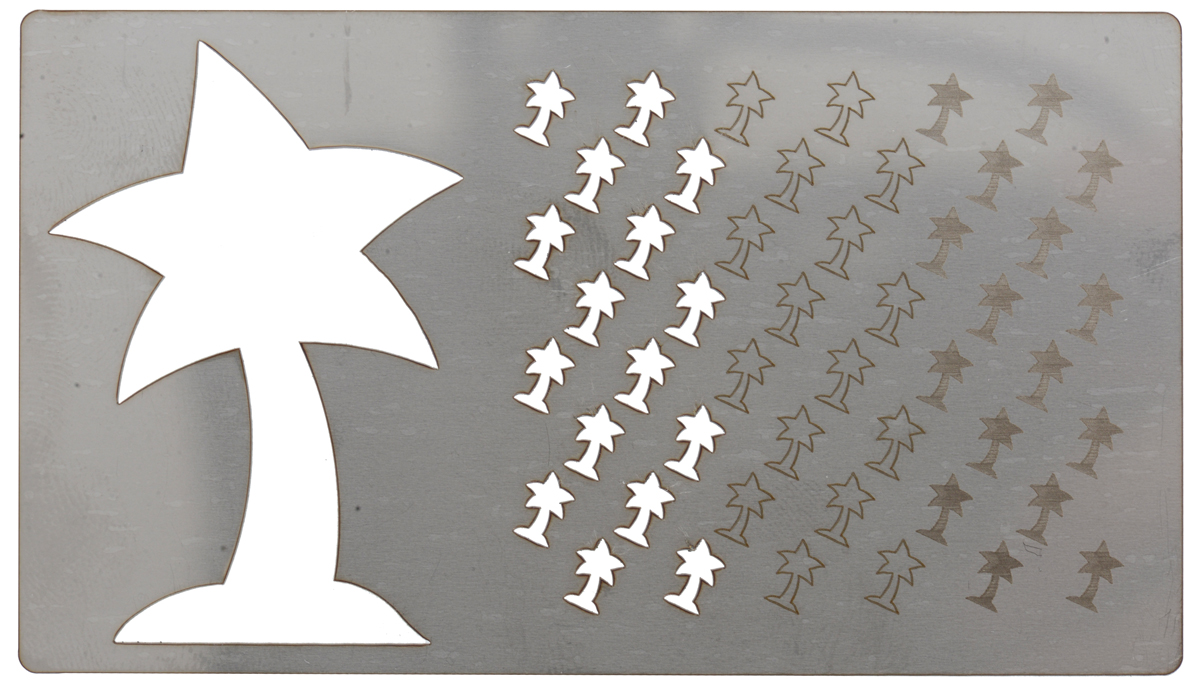
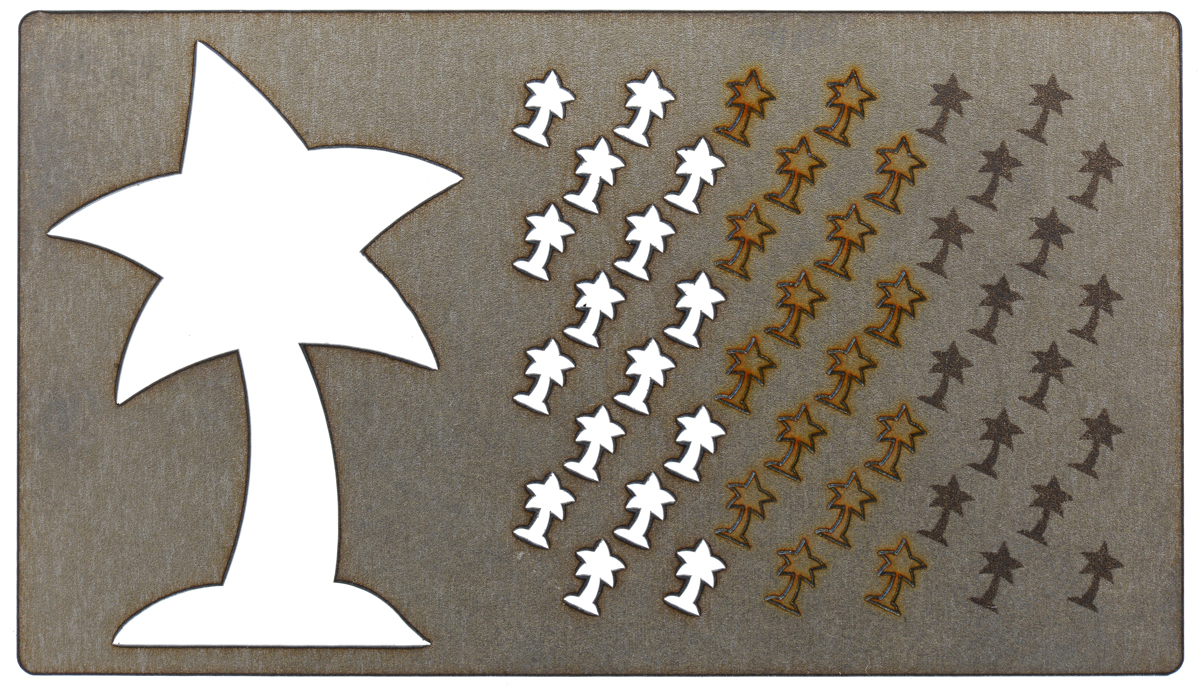

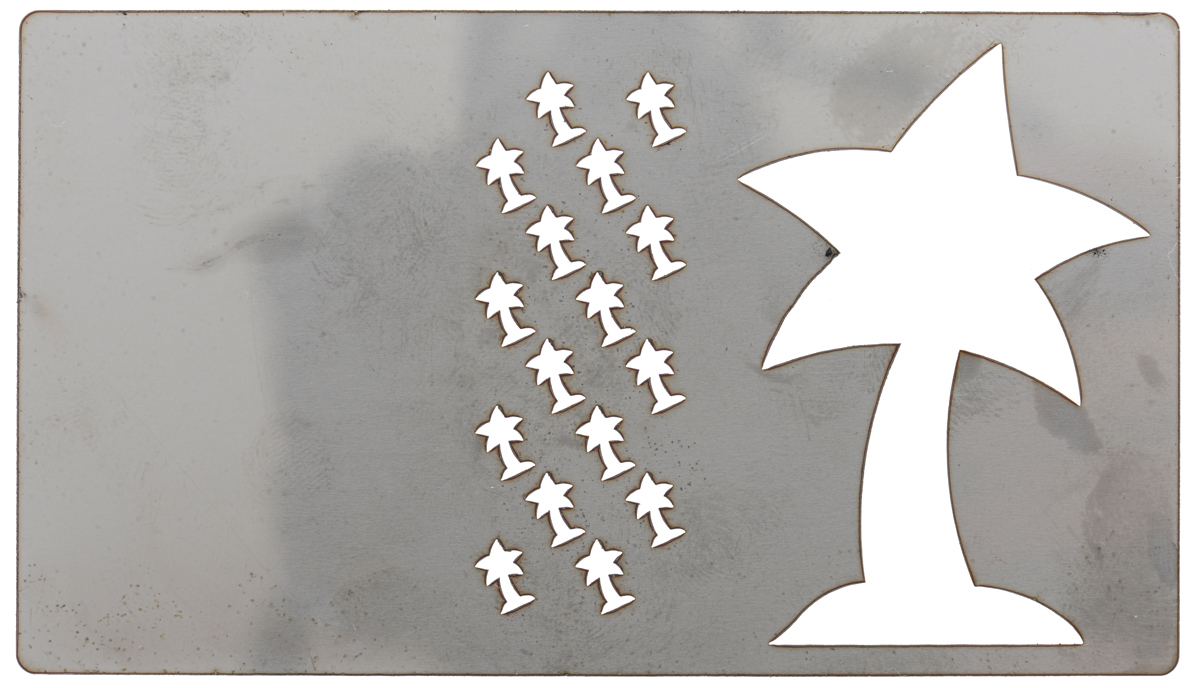
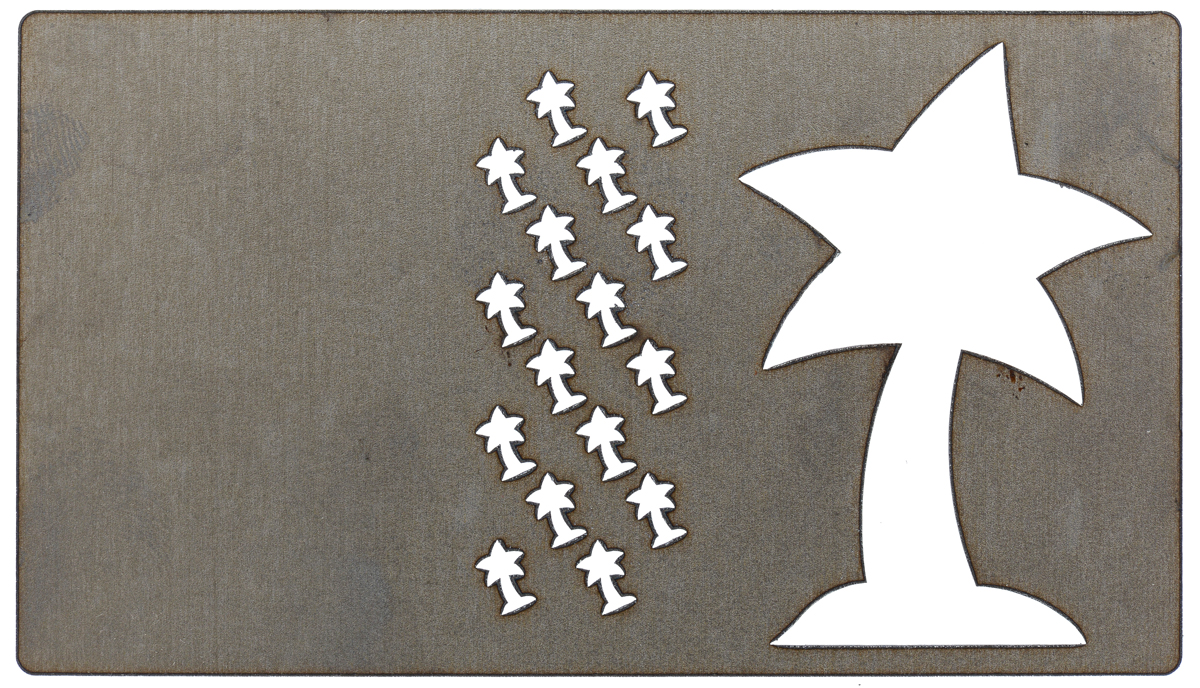
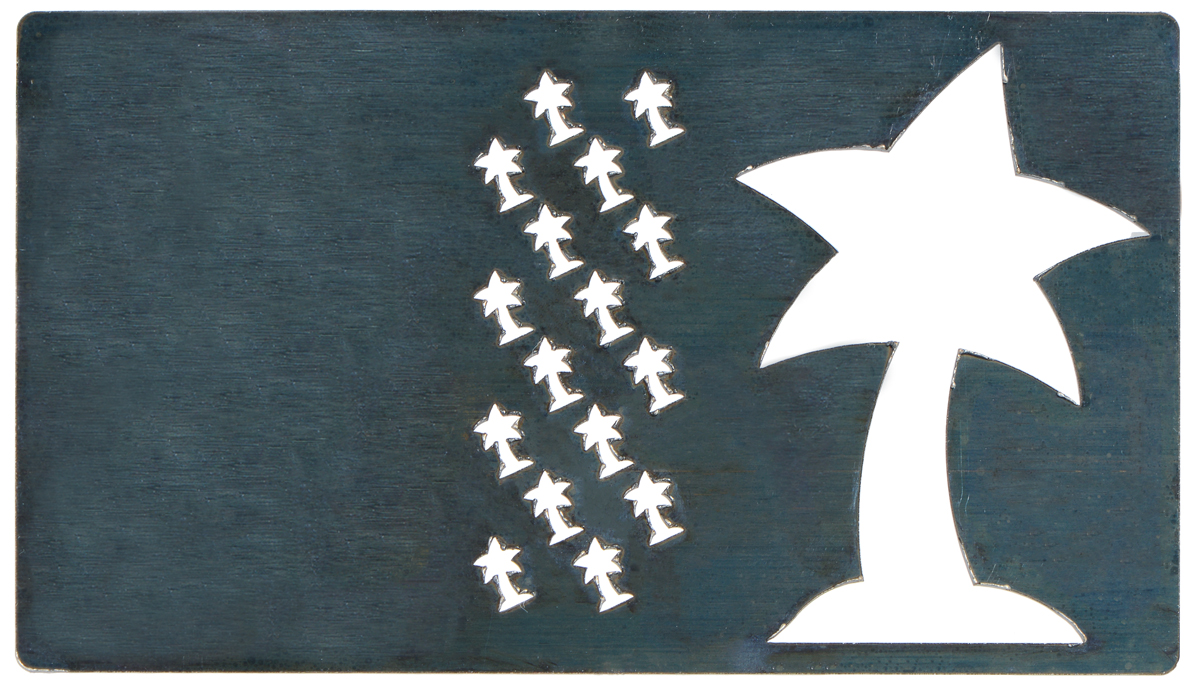
You can see in the pictures above that laser-cut steel parts have a slight discoloration along the laser-cut edges caused by the chemical reaction that takes place when cutting. Depending on the steel type and whether the cuts are through the material, vector-etched line art, or raster-engraved filled-in areas, the discoloration is different (some tend to be brownish while others are a dark gray). We do not guarantee that parts will be free of blemishes; we ship the parts without any post processing, and we currently do not offer additional services such as deburring, tumbling, or bending.
As stocked materials (shown on our quote request page), we carry #304-2B stainless steel in 0.024″, 0.030″, 0.036″, 0.048″, 0.060", and mild steel in 0.030″ and 0.060″. We can arrange to use material you ship to us, but keep in mind that steel is the only metal we can cut. We cannot cut copper, brass, titanium, aluminum, or precious metals.
To get started on having your laser-cut steel parts cut, submit a quote request here.
Related products


Web-based control of a telescope using Raspberry Pi
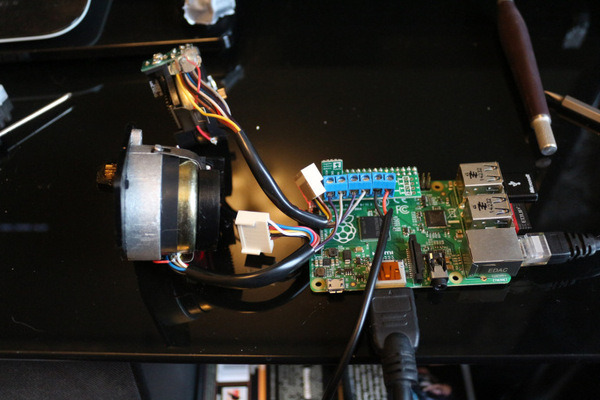 |
@MarcisShadow is working on a project using a Raspberry Pi with a Pololu DRV8835 Dual Motor Driver Kit for Raspberry Pi to control a Celestron NexStar GoTo Mount, allowing web-based control of a telescope. He also uses a Pololu 5V Step-Up/Step-Down Voltage Regulator S7V7F5 connected to the motor driver to power the Raspberry Pi from the motor power supply.
The project is being documented in a multi-part series on DirtyAstro.com. Part 1 covers the electronics that come with the telescope mount, part 2 is about assembling and testing the DRV8835 driver kit and motors, part 3 tackles setting up the Raspberry Pi and using an SSH client (PuTTY) to connect to it remotely via a PC, and part 4 is about getting Node-Red running to program the Raspberry Pi graphically using a web interface from any machine on the network.
He is not finished with the project, but I have a couple of suggestions for him or anyone doing something similar: First, since his 12 V supply exceeds the maximum operating voltage of both the motor driver (11 V) and the regulator (11.8 V), I would recommend using different ones. Keep in mind that “wall-wart” DC power supplies, especially older transformer-based ones, can have a voltage significantly higher than the rated voltage. Second, a board running a full operating system is usually not great for timing-sensitive operations like counting encoder ticks. If it can’t keep up with the pulse rate, I would recommend using a secondary microcontroller for the encoders. One possibility would be to use the A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge, which incorporates a more appropriate 5.5 V – 36 V regulator, an Arduino-compatible microcontroller, and dual motor controllers.
Related products




New distributors in the Americas
Last week, I wrote about our new distributors in Europe. We’ve also added some new distributors in the Americas since our last round of new distributor introductions:
 |
 |
 |
 |
 |
See the full list of over 200 distributors to find one in your area.
Animatronic C-3PO replica
This animated C-3PO replica, made by one of our customers, moves its eyes, arms, head, and—in true C-3PO fashion—tells tasteless jokes. The movements are animated by a Pololu Mini Maestro 18-channel USB servo controller. A Pololu RC switch with relay (controlled by the Maestro, not an RC transmitter) shuts off the power to the head to avoid servo humming noises. (You can achieve a similar result with most servos by not sending RC servo pulses, which a Maestro does when the servo target is zero.)
 |
The customer’s C-3PO web page has more videos and extensive documentation on how the replica was built.
Related products


RC multiplexer for quadcopter operator mode switching
 |
One of our customers, “Bartman” on the dronevibes.com forum, has made a video of himself planning his build and a forum post that explains how he built his quadcopter. He was inspired by the DJI Inspire 1, which raises its struts to get them out of the camera’s way. Bartman proposes a lighter and cheaper arrangement: when flying the quadcopter in its semi-autopilot “carefree” mode, he switches yaw control from the pilot to the camera operator. This gives the camera operator panning (via the entire copter’s yaw motion) without the need for a separate panning mechanism. He uses a Pololu RC multiplexer to achieve the control switching.
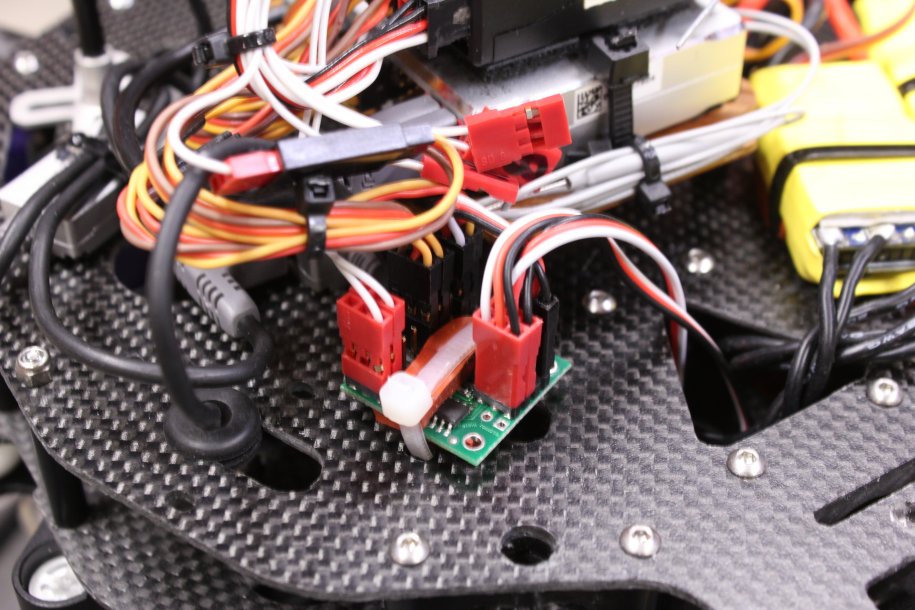 |
A close-up of the RC mux on Bartman’s multi-rotor. |
|---|
More details and discussion are in the forum thread.
Related products

Automatic rotating arcade cabinet display
It only took two years but finally the automatic monitor is PERFECT pic.twitter.com/NTG5CiShqT
— Raph Koster (@raphkoster) February 19, 2017
Customer Raph Koster made this slick automatic rotating arcade cabinet display, which allows the arcade cabinet to easily switch from landscape to portrait depending on the game. The monitor is rotated by a servo controlled by a Micro Maestro 6-Channel USB Servo Controller. The Maestro is especially convenient for this type of project, because you can connect it to the computer using USB then control the servo using our command line utility usccmd.
Raph shares his usccmd scripts for automating the rotation along with a full parts list and extensive step-by-step build information in his forum post at ArcadeControls.com.
Related products

TwoPotatoe and ThreePotatoe compete at AVC
 |
I am happy to bring some overdue attention to our customer who created TwoPotatoe, a balancing robot that I first wrote about on this blog a few years ago. This past fall, TwoPotatoe and his new robot ThreePotatoe competed in the Sparkfun AVC Competition. TwoPotatoe won first place for the 10 lb to 25 lb weight class. Check out the AVC video below! TwoPotatoe starts its run at about 53:00. ThreePotatoe won second place in the 25 lb to 40 lb weight class. Considering all the weight classes together, TwoPotatoe and ThreePotatoe scored third and fourth place overall, which is very impressive considering they were competing against four-wheeled robots that didn’t have to balance. ThreePotatoe’s run starts at about 1:08:30.
You can find more pictures and information about TwoPotatoe and ThreePotatoe in the AVC competition on the TwoPotatoe website.
Related products



GoonieBox: a puzzling piece of interactive furniture
Customer Guido Bonelli Jr., who is also the creator of the Dr.Duino Arduino shield, had us laser cut pieces of baltic birch for a unique piece of furniture for his home: a large, interactive puzzle. An Arduino Mega 2560 R3 controls the various puzzles and contraptions packed into this piece. His article in Design News goes into more detail including a parts list and more pictures.
Related products

New distributors in Europe
We’ve added a bunch of new distributors since we last did new distributor introductions, and we are excited to welcome these new European distributors in order from east to west:
 |
 |
 |
These two bring the total distributors in France to 14!
 |
 |
See the full list of over 200 distributors to find one in your area.
Raspberry Pi balancing robot
One of our customers posted about his balancing robot on our forum. A Raspberry Pi Model B is the central controller for the robot. It communicates with a RoboClaw motor controller for motor control and measures the angle and angular velocity with a MinIMU v2. The RoboClaw also decodes quadrature encoder signals for measurements of position and velocity. The drivetrain is made entirely of Pololu parts: 37D metal gearmotors with encoders, brackets, mounting hubs, and wheels.
 |
The robot’s control algorithm allows it to correct for both positional and angular disturbances, and it can be controlled wirelessly. To develop the control system, this robot builder measured the step response of the motors using the encoders.
For more details about how the control system was developed, see the forum post.
Related products








Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










