Pololu Blog »
MechWarfare robot
Forum member jwatte posted about a robot he made for the RoboGames MechWarfare 2017 competition. The goal is to build a walking robot that tries to hit an opponent’s pressure sensors with airsoft pellets or melee weapons. The robots walk around in a scaled-down cityscape field. Autonomous operation and teleoperation are allowed, but teleoperators must view the field from cameras mounted on the robot.
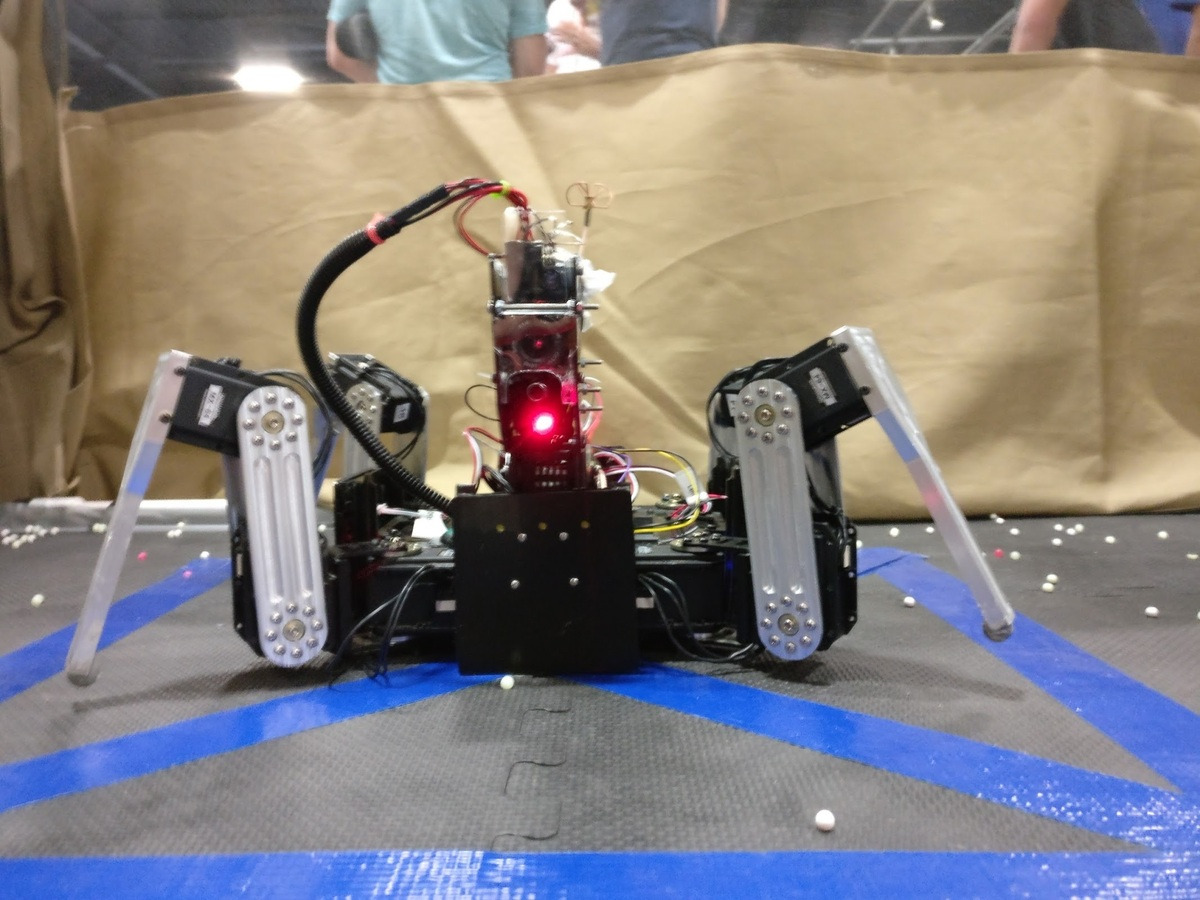 |
The mech uses a few Pololu voltage regulators: a 3.3 V, 1 A step-down regulator D24V10F3 powers a Xbee-Pro 900 XSC S3B wireless transciever and the laser pointer, a 6 V, 500 mA step-down voltage regulator D24V5F6 powers an OpenCM 9.04A robot logic board, and a adjustable step-down regulator D24V6ALV powers a 5.8 GHz wireless camera. A 250:1 Micro Metal Gearmotor LP 6V drives the plastic BB agitator that feeds the airsoft gun. The wiring harnesses used a lot of our pre-crimped wires.
For more details including a system block diagram see the forum post.
Related products




-

FEETECH Mini Servo FT1117M
- 4 May 2017We added the FEETECH Mini Servo FT1117M to our expanding RC servo selection.This miniature-sized servo has a stall torque of 50 oz-in (3.5 kg-cm)...
-

Addressable through-hole RGB LEDs are back
- 10 May 2017We’re happy to announce that our previously discontinued addressable through-hole RGB LEDs are once again part of our catalog and in stock! While...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
