Pololu Blog »
Pololu Blog (Page 4)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New product: Dobot MG400 Desktop Cobot Robotic Arm
 |
We are pleased to announce that Pololu is now an authorized Dobot distributor, and our first offering from their catalog is a robot arm that we are especially excited about: the Dobot MG400 Desktop Cobot Robotic Arm. The Dobot MG400 is a departure from products typically available from Pololu. While the 8 kg (17 lb) unit is small for the collaborative robot world, it is much larger than typical Pololu products, and the cost is correspondingly higher as well. However, the price is still very competitive for what the robot arm offers, as the high ±0.05 mm positional repeatability, collision detection, and drag-to-teach ability make this cobot a compelling option for serious automation applications. With a footprint of 19 cm (7.5 in) square, the small size and low cost also make the Dobot MG400 accessible to many education and research applications that need more than a toy or hobby product. The following video shows off some of the arm’s features:
The Dobot MG400 has a maximum reach of 44 cm and can rotate through 320°, and it can lift payloads up to 500 g (18 oz). Dobot makes a sliding track module that substantially expands the operating envelope of this robot and a vision system, which are also available through Pololu (product pages for those are coming soon).
|
|


The picture below shows all of the accessories included with the MG400:
 |
Accessories included with the Dobot MG400 Desktop Cobot Robotic Arm. |
|---|
Please note that this arm does not include any grippers, but it does include a general-purpose flange for mounting end effectors that can be purchased separately from Dobot or other suppliers, or you can 3D print your own. A suction nozzle is included, but it requires an external air supply (compressor not included) to function.
The MG400 can be programmed a variety of ways, including through drag-to-teach positioning, a graphical programming interface, and Lua scripting. The controller in the base has plenty of I/O that makes it easy to integrate the robot into a bigger system.
 |
The pictures below show example MG400 applications with custom 3D-printed electromagnet end effectors used to manipulate Micro Metal Gearmotors for packaging and testing.
|
|


Related products

New products: A5984 Stepper Motor Driver Carriers
 |
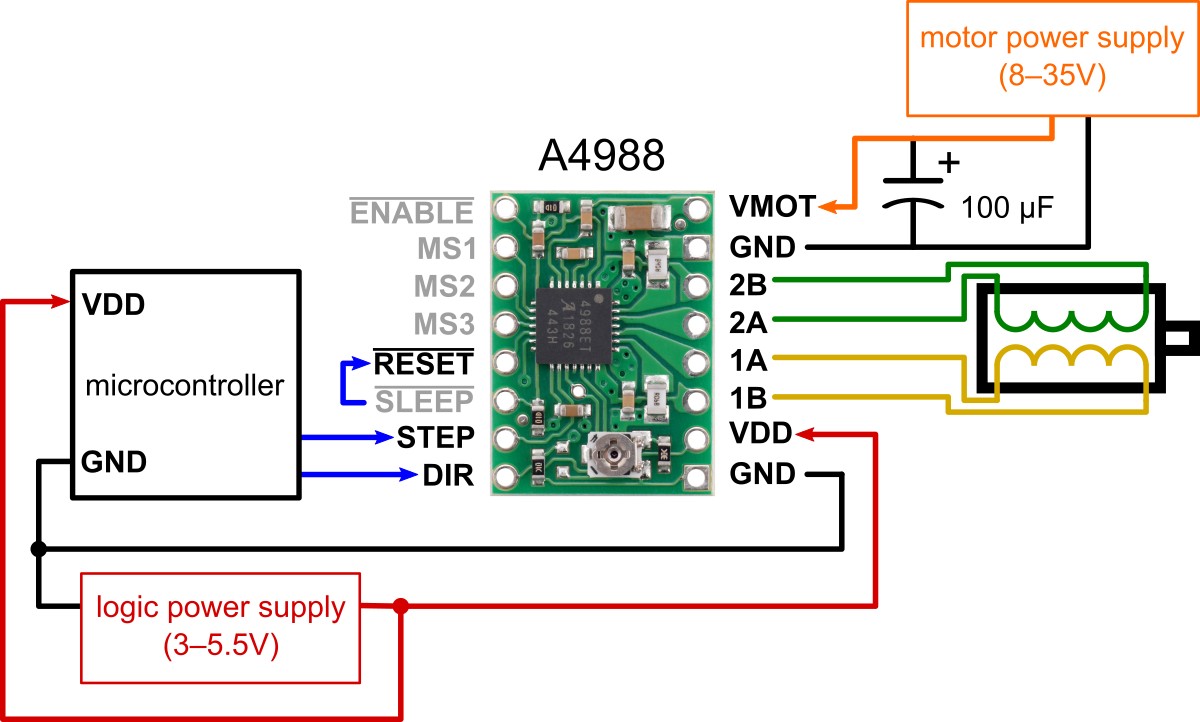
We are excited to introduce our new series of stepper motor drivers based on the Allegro A5984 that offer an easy way to control bipolar stepper motors from supply voltages between 8 V and 40 V (absolute max). It’s hard to believe it’s been 15 years since we introduced the original A4983 stepper motor driver carrier in the small 16-pin form factor that would become ubiquitous for stepper motor drivers. We updated the product in 2011 when Allegro released the newer A4988, but since then we have released boards for stepper motor drivers from other semiconductor manufacturers, including Texas Instruments (most notably the DRV8825, and DRV8834, and more recently the DRV8434 series), Monolithic Power Systems (MP6500), STMicroelectronics (STSPIN820 and STSPIN220), and Toshiba (TB67S249FTG and TB67S279FTG). The new Allegro A5984 carriers, which can be used as drop-in replacements for the A4983/A4988 in many applications, bring us full circle with those original drivers, and with support from Allegro, we are able to offer them at extra low prices.
|
|

As with our other stepper driver products, we are offering the A5984 carriers with small trimmer potentiometers for setting the current limit. However, these can be a little fiddly to work with, so we are also offering several fixed-current versions for cases where you just want a particular set point without having to tune each board (for volume applications, we can do custom production runs with whatever set point you need). We also have two PCB options—a standard 2-layer version that is most economical for lower-current applications, and a 4-layer “Blue Edition” for maximum performance that can deliver up to 1.2 A continuous per phase (heat sinks and active air flow can bump that higher). The following table shows all the options:
 Adjustable Current, Blue Edition |
 Adjustable Current |
 Fixed 1.5A@5V / 1A@3.3V, Blue Edition |
 Fixed 1A@5V / 660mA@3.3V, Blue Edition |
 Fixed 750mA@5V / 500mA@3.3V |
 Fixed 500A@5V / 330mA@3.3V |
|
|---|---|---|---|---|---|---|
| Current limit (VDD = 5 V): |
adjustable (potentiometer) 1.2 A max continuous 2 A peak* |
adjustable (potentiometer) 1 A max continuous 2 A peak* |
1.5 A* | 1 A | 750 mA | 500 mA |
| Current limit (VDD = 3.3 V): |
1 A | 660 mA | 500 mA | 330 mA | ||
| Available versions: | ||||||
| PCB layers: | 4 | 2 | 4 | 4 | 2 | 2 |
| Price without header pins: | $5.95 | $5.75 | $5.75 | $5.75 | $5.49 | $5.49 |
| Price w/headers soldered: | $6.95 | $6.75 | $6.75 | $6.75 | $6.49 | $6.49 |
| * This current exceeds what the module can deliver continuously and is only achievable for short durations or with sufficient additional cooling (e.g. adding heat sinks or active air flow). | ||||||
Compared to those original A4988s, the A5984 carriers offer a number of improvements, including a higher maximum operating voltage, more microstep options and higher-resistance current sense resistors for improved microstepping performance, a fault output for reporting over-current faults, and an adaptive decay current control algorithm that automatically adjust the amount of fast decay to optimize the motor current waveform.
Introductory special discount! To celebrate the release of the A5984 carriers, the first hundred customers to use coupon code A5984INTRO can 15% off up to five units of each!
The following tables show our full selection of 16-pin stepper motor drivers:
 STSPIN220 |
 DRV8834 |
 A4988 (original) |
 A4988, Black Ed. |
 MP6500, Pot. CC |
 MP6500, Digital CC |
 A5984 |
 A5984, Blue Ed. |
|
|---|---|---|---|---|---|---|---|---|
| Driver chip: | STMicro STSPIN220 |
TI DRV8834 |
Allegro A4988 | MPS MP6500 | Allegro A5984 | |||
| Min operating voltage: | 1.8 V | 2.5 V | 8 V | 4.5 V | 8 V | |||
| Max operating voltage: | 10 V | 10.8 V | 35 V | 35 V | 40 V | |||
| Max continuous current per phase:(1) | 1.1 A | 1.5 A | 1 A | 1.2 A | 1.5 A | 1 A | 1.2 A | |
| Peak current per phase:(2) | 1.3 A | 2 A | 2 A | 2.5 A | 2 A | 2 A | ||
| Microstepping down to: | 1/256 | 1/32 | 1/16 | 1/8 | 1/32 | |||
| Board layer count: | 4 | 4 | 2 | 4 | 4 | 2 | 4 | |
| Special features: | low input voltage |
low input voltage |
digital current control |
versions also available with fixed current limits |
||||
| Available with headers soldered?: | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| 1-piece price: | $10.95 | $9.95 | $8.95 | $9.95 | $9.95 | $9.95 | $5.75 | $5.95 |
| 1 On Pololu carrier board, at room temperature, and without additional cooling. 2 Maximum theoretical current based on components on the board (additional cooling required). |
||||||||
 STSPIN820 |
 DRV8825 |
 TB67S279FTG |
 TB67S249FTG |
 DRV8434 |
 DRV8434A |
 DRV8434S, Pot. Max. |
 DRV8434S, 2A Max. |
|
|---|---|---|---|---|---|---|---|---|
| Driver chip: | STMicro STSPIN820 |
TI DRV8825 |
Toshiba TB67S279FTG |
Toshiba TB67S249FTG |
TI DRV8434 | TI DRV8434A | TI DRV8434S | |
| Min operating voltage: | 7 V | 8.2 V | 10 V | 10 V | 4.5 V | 4.5 V | 4.5 V | |
| Max operating voltage: | 45 V | 45 V | 47 V | 47 V | 48 V(3) | 48 V(3) | 48 V(3) | |
| Max continuous current per phase:(1) | 0.9 A | 1.5 A | 1.1 A | 1.6 A | 1.2 A | 1.2 A | 1.2 A | |
| Peak current per phase:(2) | 1.5 A | 2.2 A | 2 A | 4.5 A | 2 A | 2 A | 2 A | |
| Microstepping down to: | 1/256 | 1/32 | 1/32 | 1/32 | 1/256 | 1/256 | 1/256 | |
| Board layer count: | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Special features: | Auto Gain Control, ADMD |
Auto Gain Control, ADMD |
6 decay modes with 2 smart tune options |
Stall detect, smart tune ripple control decay |
SPI control, stall detect, 8 decay mode options |
|||
| Available with headers soldered?: | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
| 1-piece price: | $18.95 | $15.95 | $11.75 | $13.95 | $10.95 | $13.95 | $13.95 | $13.95 |
| 1 On Pololu carrier board, at room temperature, and without additional cooling. 2 Maximum theoretical current based on components on the board (additional cooling required). 3 Not recommended for use with 48V batteries, which can be well above nominal when fully charged. |
||||||||
Related products












Labor Day Sale going on now!

We are having a Labor Day sale through Tuesday, September 3! Check out the sale page for more information. Please note that we will be closed Monday, so orders placed after 2 PM Pacific Time Friday, August 30 will be shipped on Tuesday, September 3.
So many new Allegro current sensor carriers (58 and counting)!
 |
|
|||||
|
|
|
|||




 |
ACS71240 Current Sensor Carrier pinout. |
|---|
We have released a ton of new current sensors! These boards, based on Allegro current-sensing ICs, have analog outputs with voltage proportional to the AC or DC current passing through the sensor while offering full electrical isolation of the current path from the sensor’s electronics. This isolation allows them to be inserted anywhere in the current path, including on the high side, and because the current path resistance is on the order of 1 mΩ or less, there is minimal effect on the rest of the system.
As with all our other carrier boards, we designed these current sensors to be usable in real-world applications rather than just as evaluation boards. To that end, we have released compact carriers for use in space-constrained systems and larger modules with more connection options available for higher-current applications. The large carriers offer better thermal dissipation thanks to their 6-layer PCBs and increased surface area, and the holes and slots for the current path connection points accommodate thicker wires along with a variety of high-current connectors (e.g. lugs, solderless ring terminals, and 4-pin terminal blocks).
We also want these modules to be usable as evaluation boards, so we have standardized our compact and large form factors, making it easier to swap among different boards to compare different sensor ICs. Additionally, having different form factors available for the same sensor IC makes it possible to evaluate how things like PCB area and the number of copper layers affects the sensor’s thermal performance.
|
|
|



Here is a quick summary of the four new sensor families:
- ACS71240: low-cost measurement of bidirectional currents ranging from 10 A to 50 A, with dedicated versions for 3.3 V and 5 V systems. A unidirectional 50 A, 5 V version is also available.
- ACS37220: low-cost measurement of bidirectional currents ranging from 100 A to 200 A, with dedicated versions for 3.3 V and 5 V systems. These have extra-low 0.1 mΩ current paths through the sensor IC and user-configurable overcurrent fault thresholds.
- ACS72981: high-bandwidth (250 kHz) measurement of unidirectional or bidirectional currents from 50 A to 200 A, with dedicated versions available for 3.3 V and 5 V systems.
- CT432/CT433: extra high-bandwidth (1 MHz), low response time (300 ns) measurement of unidirectional or bidirectional currents from 20 A to 70 A, with dedicated versions available for 3.3 V and 5 V systems. Unlike the other Allegro sensor families we carry, which use Hall effect sensing, the CT432/CT433 sensors use tunneling magnetoresistance (which Allegro calls XtremeSense™ TMR) and are optimized for high dV/dt applications.
Here’s our full list of active and preferred current sensors:
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
|---|---|---|---|---|---|---|---|---|---|
| ACS711 Current Sensor Carriers |
ACS71240 Current Sensor Carriers |
ACS724 Current Sensor Carriers |
ACS37220 Current Sensor Compact Carriers |
ACS37220 Current Sensor Large Carriers |
ACS72981 Current Sensor Compact Carriers |
ACS72981 Current Sensor Large Carriers |
CT432/CT433 TMR Current Sensor Compact Carriers |
CT432/CT433 TMR Current Sensor Large Carriers |
|
| Sensor IC | Allegro ACS711KEXT |
Allegro ACS71240 |
Allegro ACS724LLCTR |
Allegro ACS37220 | Allegro ACS72981xLR | Allegro CT432/CT433 | |||
| Sensing technology | Hall effect | Hall effect | Hall effect | Hall effect | Hall effect | XtremeSense™ TMR (tunneling magnetoresistance) |
|||
| Logic voltage range (V) | 3.0–5.5 | 3.3V versions: 3.0–3.6 5V versions: 4.5–5.5 |
4.5–5.5 | 3.3V versions: 3.15–3.45 5V versions: 4.5–5.5 |
3.3V versions: 3.0–3.6 5V versions: 4.5–5.5 |
3.3V versions: 3.0–3.6 5V versions: 4.75–5.5 |
|||
| Current range / sensitivity | Bidirectional:(1) ±15.5 A / 90 mV/A ±31 A / 45 mV/A |
3.3V Bidirectional: ±10 A / 132 mV/A ±30 A / 44 mV/A ±50 A / 26.4 mV/A 5V Bidirectional: ±10 A / 200 mV/A ±30 A / 66 mV/A ±50 A / 40 mV/A 5V Unidirectional: 0–50 A / 80 mv/A |
5V Bidirectional:(2) ±2.5 A / 800 mV/A ±5 A / 400 mV/A ±10 A / 200 mV/A ±20 A / 100 mV/A ±30 A / 66 mV/A ±50 A / 40 mV/A 5V Unidirectional:(2) 0–5 A / 800 mv/A 0–10 A / 400 mv/A 0–20 A / 200 mv/A 0–30 A / 133 mV/A |
3.3V Bidirectional: ±100 A / 13.2 mV/A ±150 A / 8.8 mV/A 5V Bidirectional: ±100 A / 20 mV/A ±150 A / 13.3 mV/A ±200 A / 10 mV/A |
3.3V Bidirectional: ±100 A / 13.2 mV/A ±150 A / 8.8 mV/A 5V Bidirectional: ±100 A / 20 mV/A ±150 A / 13.3 mV/A ±200 A / 10 mV/A |
3.3V Bidirectional:(1) ±50 A / 26.4 mV/A ±100 A / 13.2 mV/A ±150 A / 8.8 mV/A 3.3V Unidirectional:(1) 0–50 A / 52.8 mv/A 0–100 A / 26.4 mv/A 0–150 A / 17.6 mv/A 0–200 A / 13.2 mv/A 5V Bidirectional:(2) ±50 A / 40 mV/A ±100 A / 20 mV/A ±150 A / 13.3 mV/A ±200 A / 10 mV/A 5V Unidirectional:(2) 0–100 A / 40 mv/A 0–150 A / 26.7 mv/A |
3.3V Bidirectional:(1) ±50 A / 26.4 mV/A ±100 A / 13.2 mV/A ±150 A / 8.8 mV/A 3.3V Unidirectional:(1) 0–50 A / 52.8 mv/A 0–100 A / 26.4 mv/A 0–150 A / 17.6 mv/A 0–200 A / 13.2 mv/A 5V Bidirectional:(2) ±50 A / 40 mV/A ±100 A / 20 mV/A ±150 A / 13.3 mV/A ±200 A / 10 mV/A 5V Unidirectional:(2) 0–100 A / 40 mv/A 0–150 A / 26.7 mv/A |
3.3V Bidirectional: ±20 A / 50 mV/A ±30 A / 33.3 mV/A ±50 A / 20 mV/A 3.3V Unidirectional: 0–50 A / 40 mv/A 0–65 A / 30.8 mv/A 5V Bidirectional: ±20 A / 100 mV/A ±30 A / 66.7 mV/A ±50 A / 40 mV/A ±65 A / 30.8 mV/A 5V Unidirectional: 0–50 A / 80 mv/A 0–70 A / 57.1 mv/A |
3.3V Bidirectional: ±50 A / 20 mV/A 3.3V Unidirectional: 0–50 A / 40 mv/A 0–65 A / 30.8 mv/A 5V Bidirectional: ±50 A / 40 mV/A ±65 A / 30.8 mV/A 5V Unidirectional: 0–50 A / 80 mv/A 0–70 A / 57.1 mv/A |
| IC path resistance | 0.6 mΩ | 0.6 mΩ | 0.6 mΩ | 0.1 mΩ | 0.2 mΩ | 1 mΩ | |||
| PCB | 2 layers, 2-oz copper |
2 layers, 2-oz copper |
2 layers, 2- or 4-oz copper(4) |
2 layers, 2-oz copper |
6 layers, 2-oz copper |
6 layers, 2-oz copper |
6 layers, 2-oz copper |
2 or 4 layers(5), 2-oz copper |
6 layers, 2-oz copper |
| Max bandwidth | 100 kHz | 120 kHz | 120 kHz(3) | 150 kHz | 250 kHz | 1 MHz | |||
| Size | 0.7″ × 0.8″ | 0.7″ × 0.8″ | 0.7″ × 0.8″ | 0.7″ × 0.8″ | 1.4″ × 1.2″ | 0.7″ × 0.8″ | 1.4″ × 1.2″ | 0.8″ × 1.1″ | 1.4″ × 1.2″ |
| Overcurrent fault output | User-configurable threshold | ||||||||
| Common-mode field rejection | |||||||||
| Non-ratiometric output | |||||||||
| 1-piece price | $4.85 | $5.25 | $9.95 – $11.49 | $6.95 | $10.95 | $13.95 | $16.95 | $12.95 | $16.95 |
(1) Sensitivity when Vcc = 3.3 V; sensitivity is ratiometric.
(2) Sensitivity when Vcc = 5 V; sensitivity is ratiometric.
(3) Bandwidth can be reduced by adding a filter capacitor.
(4) ±50A version uses 4-oz copper PCB; all other versions use 2-oz copper.
(5) 50A and higher versions use 4-layer PCB; all other versions use 2-layer PCB.
More sensors are coming, and we will be releasing them as they become available. Do you have a favorite current sensor? Let us know in the comments!
New product: Pololu H2 High-Power Motor Driver 36v11 CS
 |
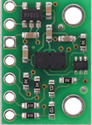
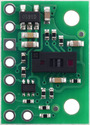
We’re excited to introduce our new 60V-max H2 High-Power Motor Driver 36v11 CS, which joins our lineup of high-power motor drivers as the new highest-voltage option. Like our other high-power motor drivers, this board is a discrete MOSFET H-bridge that is designed to drive large brushed DC motors. The H2 36v11 can supply a motor with continuous currents up to 11 A over a wide 5 V to 60 V (absolute maximum) operating range. The board also features reverse-voltage protection and an on-board bidirectional current sensor that provides a direct measurement of the motor current.
|
|


The H2 driver is designed to be a near drop-in replacement for its predecessor and for our lower-voltage G2 drivers, with an identical form factor and a similar pinout. Compared to its predecessor, the H2 version adds improvements such as reverse-voltage protection, current sensing, and compatibility with 3.3V systems (as well as 5V). Compared to the newer G2 drivers, the main differentiator is the wider operating voltage range, but the H2 36v11 CS also adds an on-board bidrectional current sensor that provides a direct measurement of the motor current, even when the driver isn’t actively driving. There are also differences in the pinout, control interface, and some aspects of the operation, so please see the H2 product page for more information on compatibility between it, its prececessor, and the G2 versions.
Introductory special discount! To celebrate the release of the H2 36v11 CS, the first hundred customers to use coupon code H236V11CSINTRO can get up to three units for just $34.95 each!
New product: VL53L4CD Time-of-Flight Distance Sensor Carrier
 |
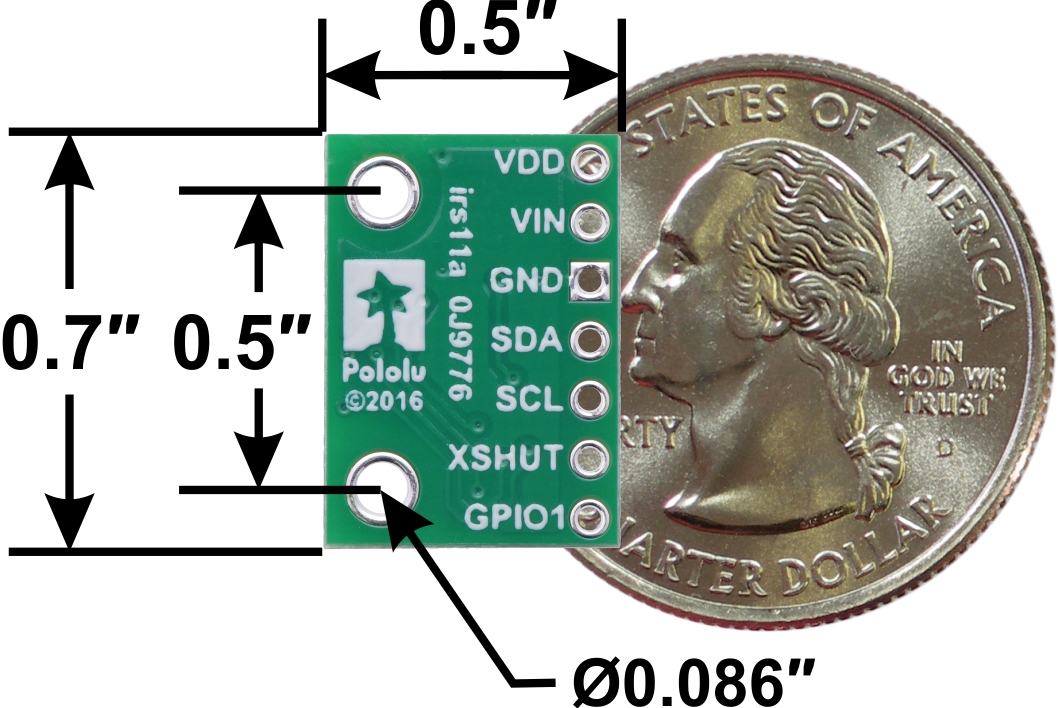 |
We are pleased to announce the release of our new low-cost time-of-flight distance sensor featuring ST’s VL53L4CD. The VL53L4CD has a detection range of 1 mm to 120 cm (4 ft) with a resolution of 1 mm and an update rate of up to 100 Hz. This distance sensor is notable for being able to accurately measure the distances to objects even as they are almost touching the sensor face.
One interesting feature of the VL53L4CD is its Ultra-Low Power mode, which allows it to act as a basic proximity detector with greatly reduced average current consumption (less than 100 μA in some cases). In this mode, the sensor does not output distance and other data as usual; it simply raises an interrupt when a target is detected. This functionality is enabled with ST’s VL53L4CD ULP API (application programming interface), and the ULP and standard drivers can be used together to let the VL53L4CD switch from low-power proximity detection to accurate ranging once it sees a target. (ULP drivers are now available from ST for the VL53L1X and VL53L3CX as well.)
Introductory special discount! With the release of the VL53L4CD carrier, we are also bringing back introductory special discounts, which was how we celebrated the release of new products prior to the pandemic and ensuing parts shortages. The first hundred customers to use coupon code VL53L4CDINTRO can get up to five units for just $8.88 each!
The VL53L4CD is the new lowest-cost member of the ST FlightSense ToF sensor family, which includes higher-performance alternatives with longer ranges and capable of multi-target detection:
 VL6180X carrier |
 VL53L4CD carrier |
 VL53L0X carrier |
 VL53L1X carrier |
 VL53L3CX carrier |
 VL53L5CX carrier |
 VL53L7CX carrier |
 VL53L8CX carrier |
|
|---|---|---|---|---|---|---|---|---|
| Maximum range:(1) | 60 cm | 120 cm | 200 cm | 400 cm | 500 cm | 400 cm | 350 cm | 400 cm |
| Minimum range: | ~10 mm | 1 mm | ~30 mm | 40 mm | 10 mm | 20 mm | ||
| Field of view: | 25° | 18° | 25° | 15° to 27° diagonal, programmable |
25° | 65° diagonal, up to 8×8 zones |
90° diagonal, up to 8×8 zones |
65° diagonal, up to 8×8 zones |
| Other features: | ambient light sensing, low memory footprint(2) |
low memory footprint(2), ultra-low power mode |
low memory footprint(2) | low memory footprint(2), ultra-low power mode |
multi-target detection, ultra-low power mode |
multi-target detection | multi-target detection | multi-target detection, improved performance in ambient light |
| Maximum update rate:(1) | ~150 Hz | 100 Hz | 50 Hz | 100 Hz | 125 Hz | 60 Hz | ||
| Operating voltage range: | 2.6 V to 5.5 V | 2.5 V to 5.5 V | 3.2 V to 5.5 V | |||||
| Regulator voltage: | 2.8 V | 3.3 V | 1.8 V and 3.3 V | |||||
| Typical active-ranging supply current: |
25 mA | 25 mA | 20 mA | 20 mA | 20 mA | 100 mA | ||
| Peak supply current: | 40 mA | 150 mA | ||||||
| Interface: | I²C | I²C, SPI | ||||||
| Dimensions: | 0.5″ × 0.7″ | 0.5″ × 0.9″ | ||||||
| 1-piece price: | $19.95 | $13.95 | $19.95 | $22.95 | $19.95 | $19.95 | $19.95 | $24.95 |
| 1 Effective range and update rate depend on configuration, target, and environment. 2 Suitable for use with typical 8-bit MCUs. |
||||||||

Customer video: Replace your POWER SWITCH on your Arduino or ESP32 projects without reinventing the wheel
Electrical engineer and content creator Dave Crabbe recently released a video demonstrating his use of our pushbutton power switch to control power to his ESP32 remote-controlled toy dump truck. He has an open-source, custom-designed PCB for the electronics, and the Gerber files and schematic are linked from the video description.
If you like Dave’s content, be sure to subscribe to his YouTube channel so you don’t miss his latest videos.
Related products




Independence Day sale going on now!

We are having an Independence Day sale starting now through Monday, July 8! Check out the sale page for more information. Please note that we will be closed Thursday, July 4 in observance Independence Day, so orders placed after 2 PM Pacific Time Wednesday, July 3 will be shipped on Friday, July 5.
New products: 1.4-7V fine-adjust D30V3xMALx step-down voltage regulators
|
|


We are now offering lower-voltage versions of our D30V3x step-down voltage regulators with a precision-adjustable 1.4 V to 7 V output. As with the rest of the D30V3x line, these new regulators work with input voltages between 3.3 V and 45 V and can deliver between 1 A and 4.5 A of output current, depending on the input and output voltages. They have very low dropout voltages and feature a power-good output for identifying when the output voltage is not being maintained. They also feature an enable pin with a precise threshold for turning off the regulator, and some of the versions have additional circuitry to offer a precision-adjustable low-voltage cutoff.
 |
 |
Four versions are available with this new 1.4 V to 7 V output range:
- D30V30MAL – compact (0.6″ × 1.0″), double-sided assembly with precision-adjustable output and no low-voltage cutoff.
- D30V30MALCMA – compact (0.6″ × 1.0″), double-sided assembly precision-adjustable output and precision-adjustable low-voltage cutoff.
- D30V33MAL – larger (0.9″ × 1.2″), single-sided assembly with precision-adjustable output and no low-voltage cutoff. The increased heat dissipation from the larger boards let this version deliver slightly more current than the D30V30MAL.
- D30V33MALCMA – larger (0.9″ × 1.2″), single-sided assembly with precision-adjustable output and precision-adjustable low-voltage cutoff. The increased heat dissipation from the larger boards let this version deliver slightly more current than the D30V30MALCMA.
 |
 |
The following table shows all of the members of the D30V3x family:
| Regulator | Output voltage | Typical max output current1 |
Input voltage2 | Adjustable low-voltage cutoff |
Size | Price |
|---|---|---|---|---|---|---|
| #4891: D30V30F3 | 3.3 V | 3.7 A | 3.3 V – 45 V | – | 0.7″ × 0.8″ | $19.95 |
| #4892: D30V30F5 | 5 V | 3.4 A | 5 V – 45 V | $19.95 | ||
| #4893: D30V30F6 | 6 V | 3.3 A | 6 V – 45 V | $20.95 | ||
| #4894: D30V30F7 | 7.5 V | 3 A | 7.5 V – 45 V | $20.95 | ||
| #4895: D30V30F9 | 9 V | 2.9 A | 9 V – 45 V | $20.95 | ||
| #4896: D30V30F12 | 12 V | 2.8 A | 12 V – 45 V | $20.95 | ||
| #4897: D30V30F15 | 15 V | 2.7 A | 15 V – 45 V | $20.95 | ||
| #4873: D30V30MAL | 1.4 V – 7 V | 3.4 A | 3.3 V – 45 V | – | 0.6″ × 1.0″ | $25.95 |
| #4872: D30V30MALCMA | $29.95 | |||||
| #4875: D30V30MAS | 4.2 V – 15 V | 3 A | 4.2 V – 45 V | – | $25.95 | |
| #4874: D30V30MASCMA | $29.95 | |||||
| #4853: D30V33MAL | 1.4 V – 7 V | 3.8 A | 3.3 V – 45 V | – | 0.9″ × 1.2″ | $25.95 |
| #4852: D30V33MALCMA | $29.95 | |||||
| #4855: D30V33MAS | 4.2 V – 15 V | 3.3 A | 4.2 V – 45 V | – | $25.95 | |
| #4854: D30V33MASCMA | $29.95 | |||||
| 1At 30 V in. Actual achievable continuous output current is a function of input and output voltages and is limited by thermal dissipation. | ||||||
| 2Operating voltage must be higher than the set output voltage and is subject to dropout voltage considerations. | ||||||
Memorial Day sale going on now!

We’re having a big Memorial Day Sale that includes over 1000 products from robots to regulators to sensors to motors, and more! Check out the sale page for more information. Please note that we will be closed Monday, so orders placed after 2 PM Pacific Time Friday, May 24 will be shipped on Tuesday, May 28. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










