Pololu Blog » User Profile: Claire » Posts by Claire »
Posts by Claire (Page 2)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Pololu at the Las Vegas Mini Maker Faire 2016
The local Las Vegas hackerspace, SYN Shop, hosted the third Las Vegas Mini Maker Faire at the Henderson Convention Center recently. The event showcased a wide variety of projects and skills: drones, sand casting metal using aluminum cans, woodworking, taiko drumming, and of course robots. At our booth, Pololu showed off some older demos, like our Simple Motor Controller demo and our jrk treasure chest; some newer demos, like the motion tracking skull from Halloween; and some fun robots, like the Zumo 32U4 and Paul’s Raspberry Pi Robot. Above is a short video with highlights from the event.
Room mapping robot based on the Rover 5 chassis
This robot, created by theophil on Let’s Make Robots, uses a Rover 5 chassis with encoders, a MinIMU, sonar sensors, and a few expansion plates to do room mapping. Theophil modified the chassis to use Dagu Wild Thumper wheels, and made a custom 3D-printed adapter for connecting the wheels in a compact way. The program for the robot, which is available on GitHub, collects data from the sonar sensors about how far away objects are and creates a grayscale map where the darkness of a pixel corresponds to the robot’s confidence that an obstacle exists in that spot.
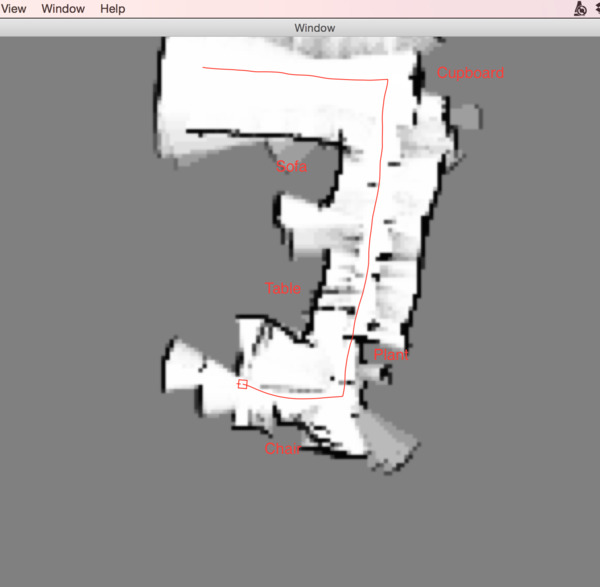 |
Example map made by theophil’s mapping rover. |
|---|
The program also includes a movement algorithm meant to drive the robot along paths that take it close to many obstacles to increase the accuracy of the sonar sensors. More about theophil’s room mapping robot can be found in his Let’s Make Robots post.
Related products






S3 Pilot board robot
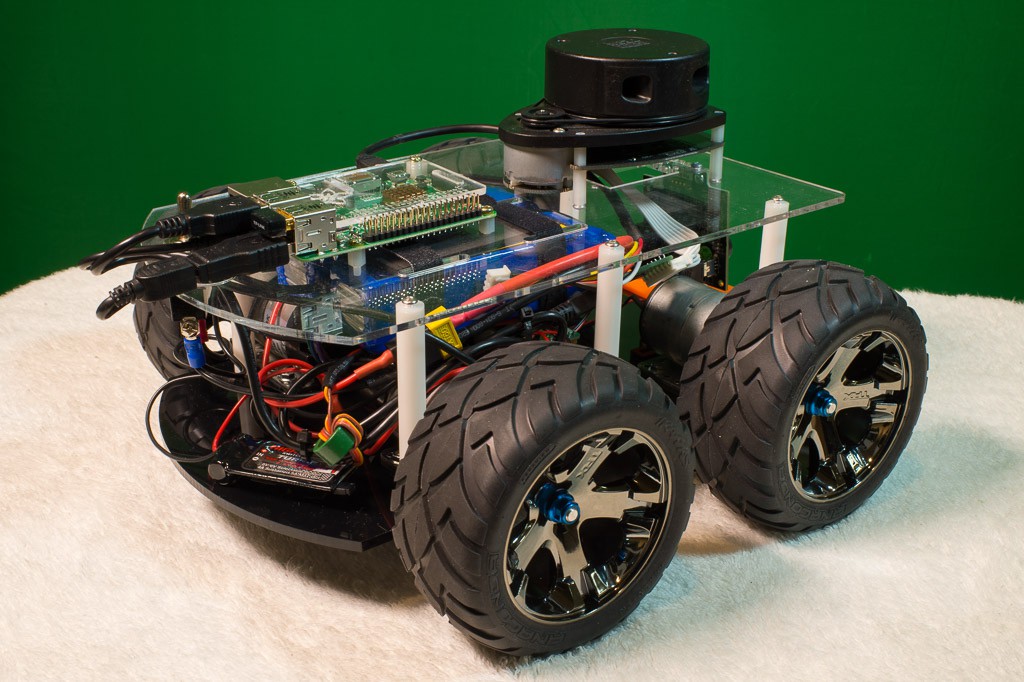 |
Forum member spiked3, whom we previously posted about, has shared another robot with a custom laser cut chassis. The new robot uses his own custom Arduino shield, the S3-Pilot, which has sockets for an IMU and two of our MC33926 Motor Driver Carriers.
 |
Custom Arduino shield created by forum member spiked3. |
|---|
The MC33926 drivers control two 37D motors with encoders, and the encoder signals are processed by the Arduino. The robot also includes a lidar, PIXY Cam, and Raspberry Pi. The on-board IMU and encoders allow the robot to keep track of where it is and what direction it is facing, so spiked3 was able to implement a high-level interface for the robot that accepts movement commands like “go forward three meters” or “turn a certain number of degrees to the right”.
You can find out more about this robot and see some videos of it being tested on spiked3’s blog.
Related products




Claire's line following robot: Oddish
A few weeks ago the local robotics club, LVBots, hosted a line following competition here at Pololu, and like many of the engineers here, I built a robot, which I named Oddish, for the competition. I really only started seriously working on my robot about a week before the competition, so when I made the final decisions about what components to use I aimed for simplicity. In the last year we have come out with several A-Star microcontroller boards that include switching regulators, so I thought it would be fun and simple to make a line follower using an A-Star as the brain and its built-in 5 V regulator to power all the other components. I chose the A-Star 32U4 Mini LV for its operating voltage range and size. Continued…
Video: Setting the Current Limit on Pololu Stepper Motor Driver Carriers
One of my many roles here at Pololu is overseeing technical support, and I have seen countless cases of customers who have problems with their stepper motor systems because they have not properly set the current limit on their stepper motor driver. To address the issue, we have made a new video that demonstrates how to set the current limit on our stepper motor driver carriers. The video also provides helpful tips and points out a few common pitfalls.
A DRV8825 carrier is used for the demonstration, but the video also applies to our A4988, DRV8824, and DRV8834 stepper motor driver carriers. In the demo, signals for the driver are provided by an Arduino-compatible A-Star 32U4 Prime SV. Here is a simplified version of the Arduino code from the video that can be used to step a motor in both directions:
/* Simple step test for Pololu stepper motor driver carriers
This code can be used with the A4988, DRV8825, DRV8824, and
DRV8834 Pololu stepper motor driver carriers. It sends a pulse
every 500 ms to the STEP pin of a stepper motor driver that is
connected to pin 2 and changes the direction of the stepper motor
every 50 steps by toggling pin 3. */
#define STEP_PIN 2
#define DIR_PIN 3
bool dirHigh;
void setup()
{
dirHigh = true;
digitalWrite(DIR_PIN, HIGH);
digitalWrite(STEP_PIN, LOW);
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
}
void loop()
{
// Toggle the DIR pin to change direction.
if(dirHigh)
{
dirHigh = false;
digitalWrite(DIR_PIN, LOW);
}
else
{
dirHigh = true;
digitalWrite(DIR_PIN, HIGH);
}
// Step the motor 50 times before changing direction again.
for(int i = 0; i < 50; i++)
{
// Trigger the motor to take one step.
digitalWrite(STEP_PIN, HIGH);
delay(250);
digitalWrite(STEP_PIN, LOW);
delay(250);
}
}
Related products









GPS puzzle box
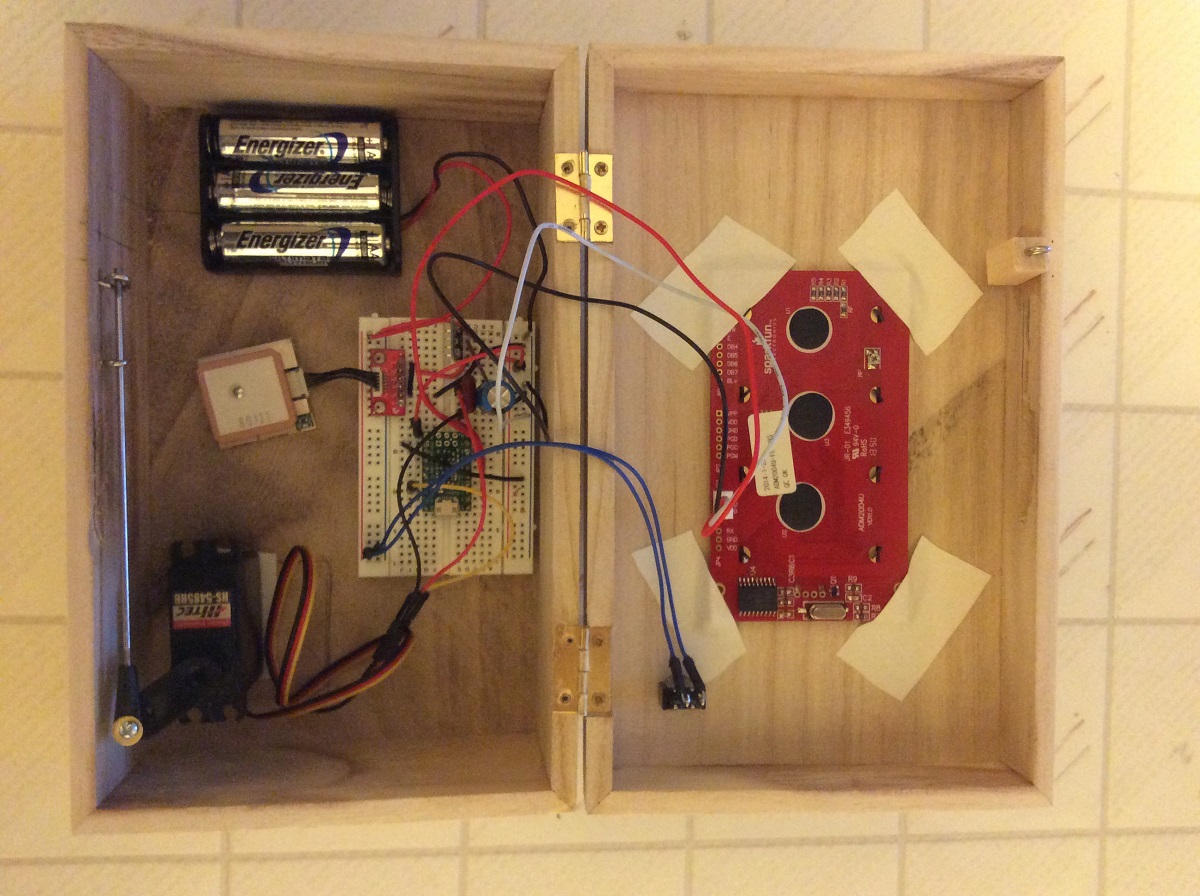 |
Forum user Bob Day shared his GPS puzzle box, which uses an A-Star 32U4 Micro, USGlobalSat EM-506 GPS Receiver, servo, and LCD to open a box only at a specific location. It also uses our S7V8F5 step-up/step-down regulator to provide power the A-Star and GPS module. In his post, Bob says that he got the idea from Mikal Hart’s “Reverse Geocache Puzzle Box”, which you can see in action in this video.
 |
Top of GPS puzzle box by forum user Bob Day. |
|---|
Pictures, connections, and the code used for the box can be found in Bob’s forum post.
Related products


New product: iMAX B6AC V2 Balance Charger and Discharger
 |
We have carried the iMAX B6AC charger from SkyRC for many years and often use it to charge batteries for our own projects and robot contests, so we are happy to now be carrying the upgraded iMAX B6AC V2 Balance Charger and Discharger. Both versions of the iMAX B6AC are capable of charging or discharging NiMH, NiCd, Pb, LiPo, Li-ion, and LiFe batteries and can be powered either from AC mains power or a DC input. The new version of the charger has all the same advanced features as the original, like individual cell balancing for up to 6 lithium cells, delta-peak sensitivity, and cyclic charging and discharging. In addition, version two of the charger is more accurate, more stable, and has many new features. Some of the new features include a Micro-USB connection for interfacing with SkyRC’s ChargeMaster PC software and upgrading the firmware, user control over the final battery voltage when charging, individual lithium cell voltage display, and an internal resistance meter.
 |
Bottom view of the iMAX B6AC V2 showing the holographic label with scratch-and-reveal security code. |
|---|
There are many counterfeit chargers that look almost identical to SkyRC products, so as with the first version, we buy these directly from SkyRC and take care to ensure that our units are genuine. If you would like to double check the authenticity of the iMAX B6AC V2 that you receive, you can reveal the security code under the scratch-and-reveal portion of the holographic label on the bottom of the charger and enter it on the SkyRC web site.
Need batteries for your charger? While we do carry some basic NiMH cells and packs, we recommend that you check out the options at local stores and online, since government restrictions, shipping, and storage issues make this a tough area for a small business to compete in. For larger packs and lithium batteries in particular, there are a number of hobby supply stores shipping from Hong Kong or China that provide excellent options.
For more information about the iMAX B6AC V2 and its features, please see its product page.
Related products


Sparky the assistive companion robot
Forum member jr1985 posted about Sparky, a robot that uses a Micro Maestro and custom Visual Basic software running on a laptop. The goal is for sparky to one day become an assistive companion robot that entertains and helps elderly or disabled people. Currently, Sparky is able to avoid obstacles and navigate through rooms while logging movements to map the areas it encounters. And it has some dancing skills:
For all the Sparky videos, take a look at jr1985’s YouTube channel.
Related products

Scary shaking tombstone
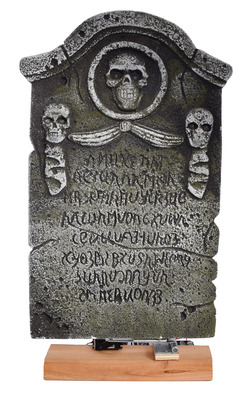
Before we started our Halloween projects, several of the Pololu engineers took a trip to a local Halloween store to get inspired. At the store there was a wall lined with the polystyrene foam tombstones that are meant to be stuck into your front lawn. They immediately made me think of the graveyard outside the haunted mansion at Disneyland, and I knew that I wanted to make one of them shake and scream. For added effect, I also picked one that had a few skulls on it, so I could place red LEDs in the eyes. Below are some of the details that went into making the project so far. Continued…
New Product: 5V, 5A Step-Down Voltage Regulator D24V50F5
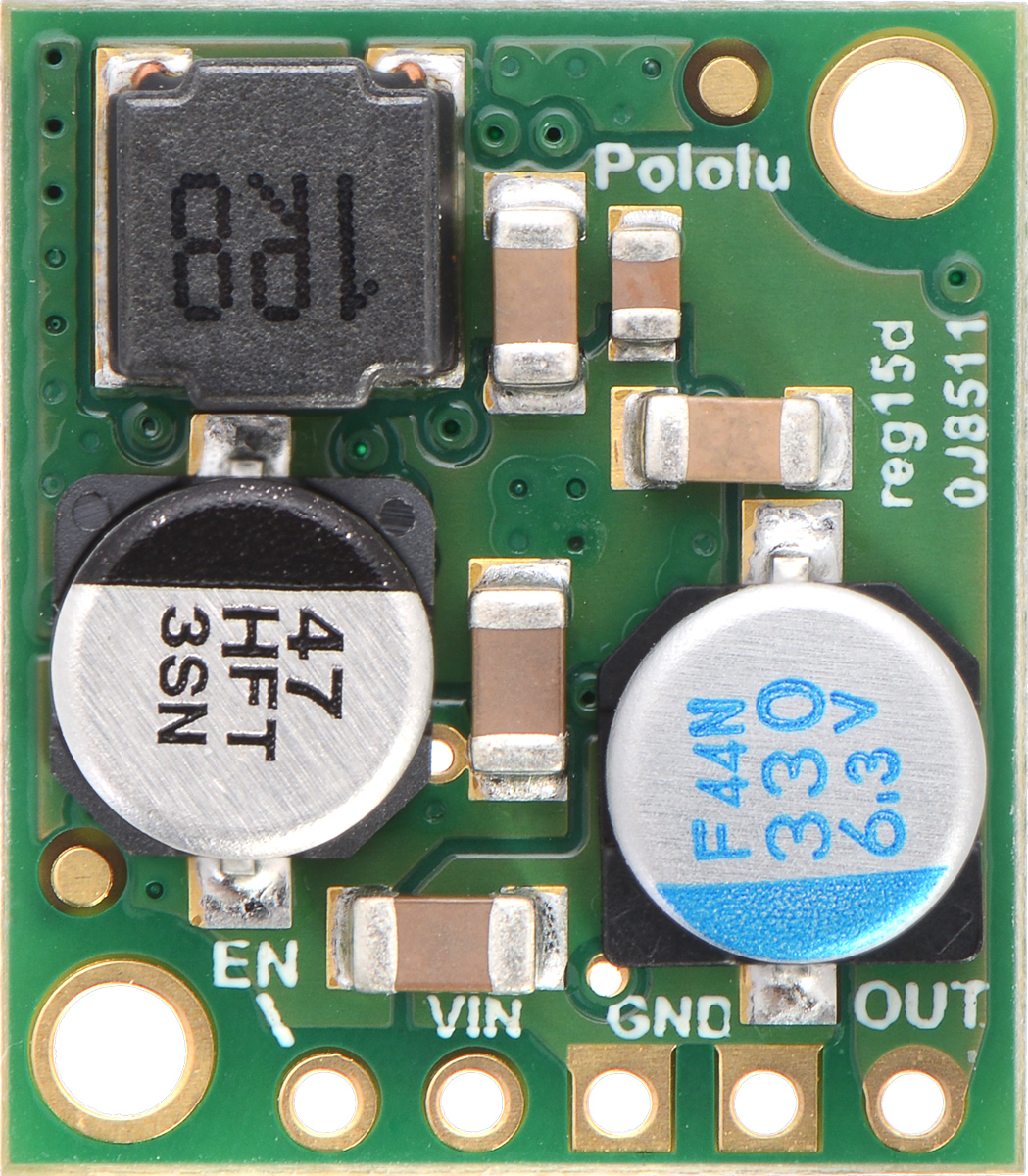 |
Remember the post I wrote two weeks ago about our tiny D24V25F5 voltage regulator and some of the testing that we did on it? Well, we were so happy with how that regulator turned out that we decided to make a higher-power version with a larger inductor and beefier MOSFETs. This new regulator is the D24V50F5, and while it is only 0.1″ bigger than its 2.5 A cousin, it can deliver 5 amps!
 |
Side-by-side comparison of the 2.5A D24V25Fx (left) and 5A D24V50F5 (right) step-down voltage regulators. |
|---|
You can see the bigger MOSFETs on the bottom side:
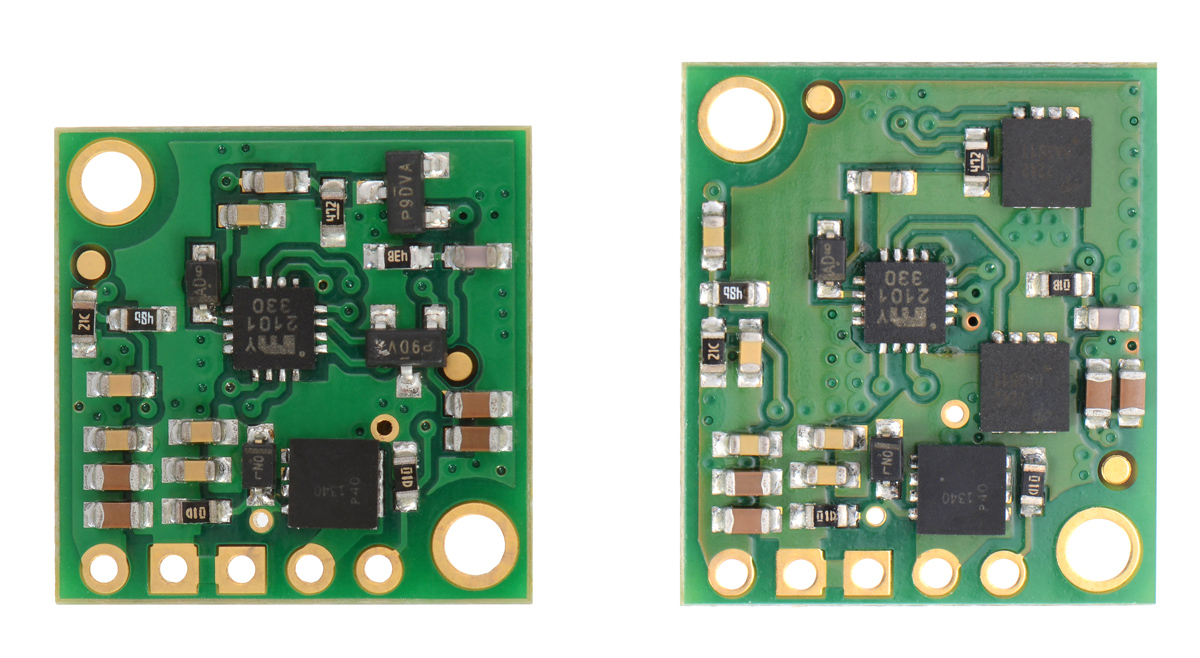 |
Comparison of the D24V25Fx (left) and D24V50F5 voltage regulators showing larger MOSFETs on the higher-power board. |
|---|
The D24V50F5 can also take inputs up to 38V and has typical efficiencies of 85% to 95%. It’s amazing how much power these little 3×3 mm MOSFETs can handle, and with its compact size and high power, this regulator is our new favorite.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










