Pololu Blog »
Pololu Blog (Page 49)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Memorial Day weekend sale
 |
We are having a big Memorial Day sale now through Monday, with discounts on over 600 products when you use the coupon code MEMORIALDAY15. Stock up on robot parts now so you can build cool things all summer long! Note that we will be closed on Monday, so orders will not ship until Tuesday, May 26.
For more information, including all of the sale items, see the sale page.
New high-current stepper driver carrier with SPI: AMIS-30543
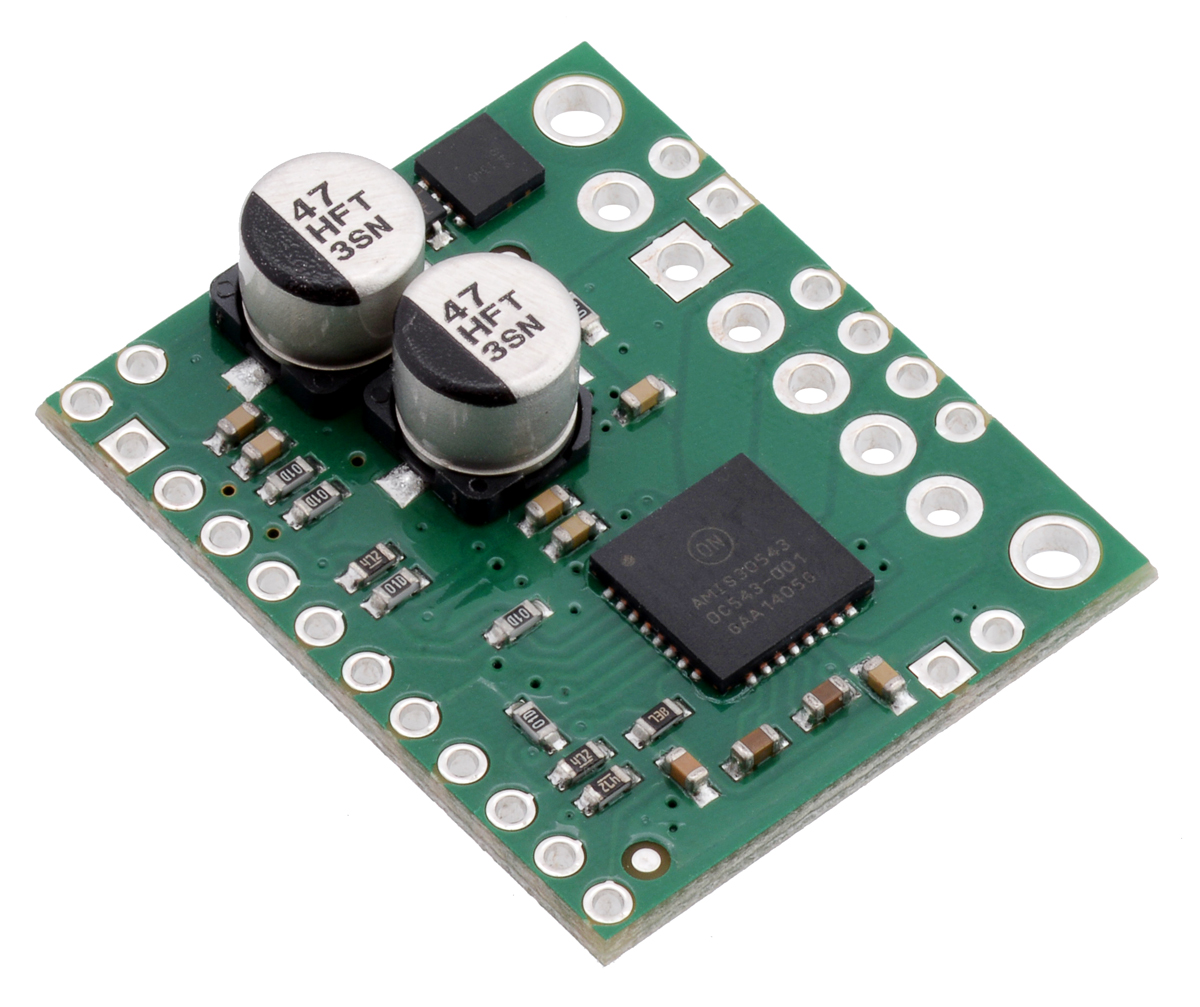 |
This new board is a Pololu carrier for ON Semiconductor’s AMIS-30543 Micro-Stepping Motor Driver, which is a high-performance stepper motor driver with advanced features not found on our other stepper motor driver carriers.
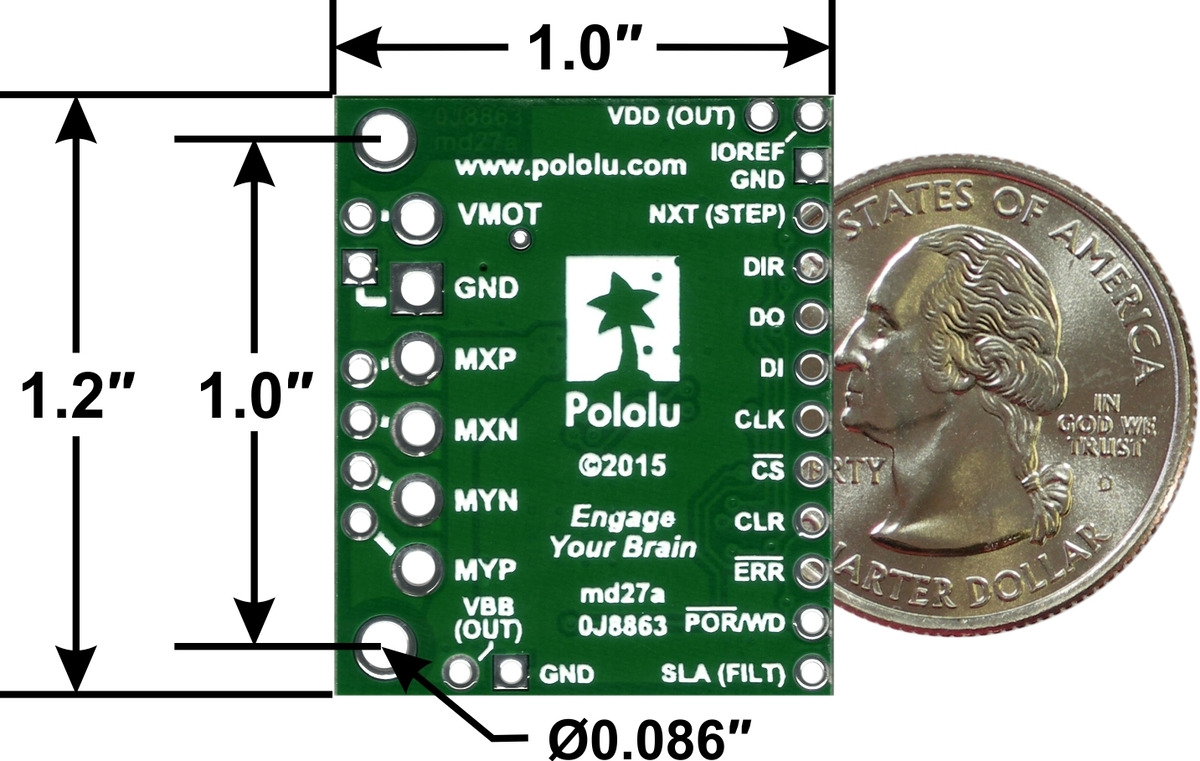 |
AMIS-30543 stepper motor driver carrier, bottom view with dimensions. |
|---|
The Pololu AMIS-30543 Stepper Motor Driver Carrier breaks out all of the important pins of the driver onto breadboard-compatible 0.1"-spaced pins, with optional terminal blocks for the power and motor connections and mounting holes for a more robust setup. Our board supplies reverse protection and all the necessary circuit components for interfacing to a microcontroller.
The AMIS-30543 is rated up to 30 V and 3 A, but (as with other stepper drivers) the current rating is a theoretical maximum assuming excellent cooling. Using our board at room temperature without a heatsink, the chip can practically supply about 1.8 A per coil, more than any of our other stepper motor driver carriers.
The SPI interface of the AMIS-30543 provides many exciting features: it lets you configure microstepping (down to 1/128-step), set the current limit, select voltage slopes, change direction, disable the outputs or put the driver to sleep, monitor the micro-step position and errors, and more. Please note, however, that you cannot step the motor over SPI.
Many of our customers have asked for software current limit control, since it allows better power management. For example, consider that stepper motors counter-intuitively use their maximum current when stopped, even if there is no holding torque required. This wastes a lot of power and generates undesirable heat in the drivers and motors. In a typical application like a 3D printer, where you don’t need much holding torque, you would want to reduce the current limit to a low value during pauses. You might use a higher limit (above the continuous limit) when accelerating and an intermediate value for constant-speed motion. The SPI current limit control on the AMIS-30543 lets you do all of this in your code.
Another advanced feature is the SLA (speed and load angle) output that indicates the level of the back-EMF voltage of the motor. This is an analog signal that can be used for stall detection or closed-loop control of the torque and speed:
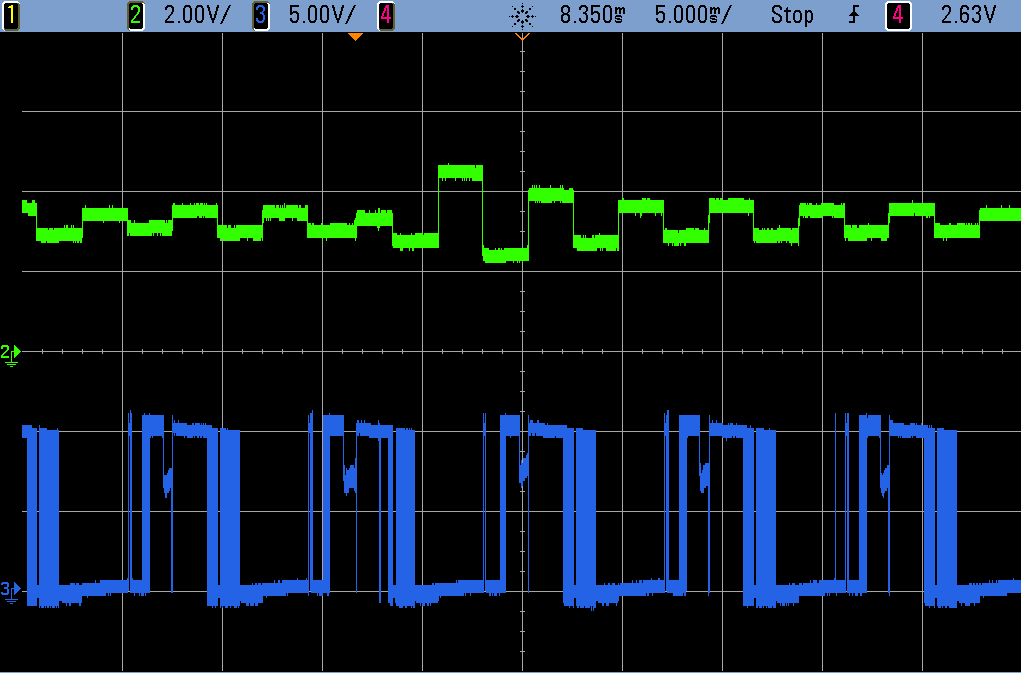 |
AMIS-30543 stepper motor driver SLA output (green) and motor output (blue). |
|---|
It is easy to get started using our Arduino library on GitHub, which provides basic functions for configuring and operating the driver as well as access to many of the advanced features. Please visit the product page for a detailed description, wiring diagrams, the AMIS-30543 datasheet, and more.
Related products

More new distributors
 |
 |
 |
 |
See the full list of over 200 distributors to find one in your area.
New 0.1″ male header strips
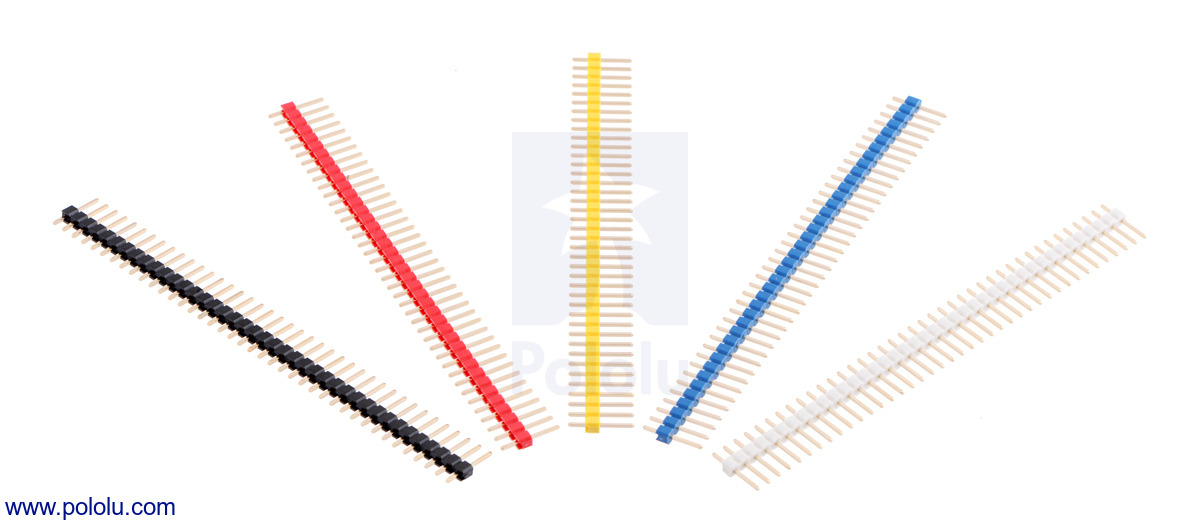 |
Make your next project more colorful with our new red, white, blue, and yellow breakaway male header strips. You can use them to add some personal flair to an otherwise boring PCB, or you can use them to color-code connections, like on this custom-assembled 24-channel Mini Maestro:
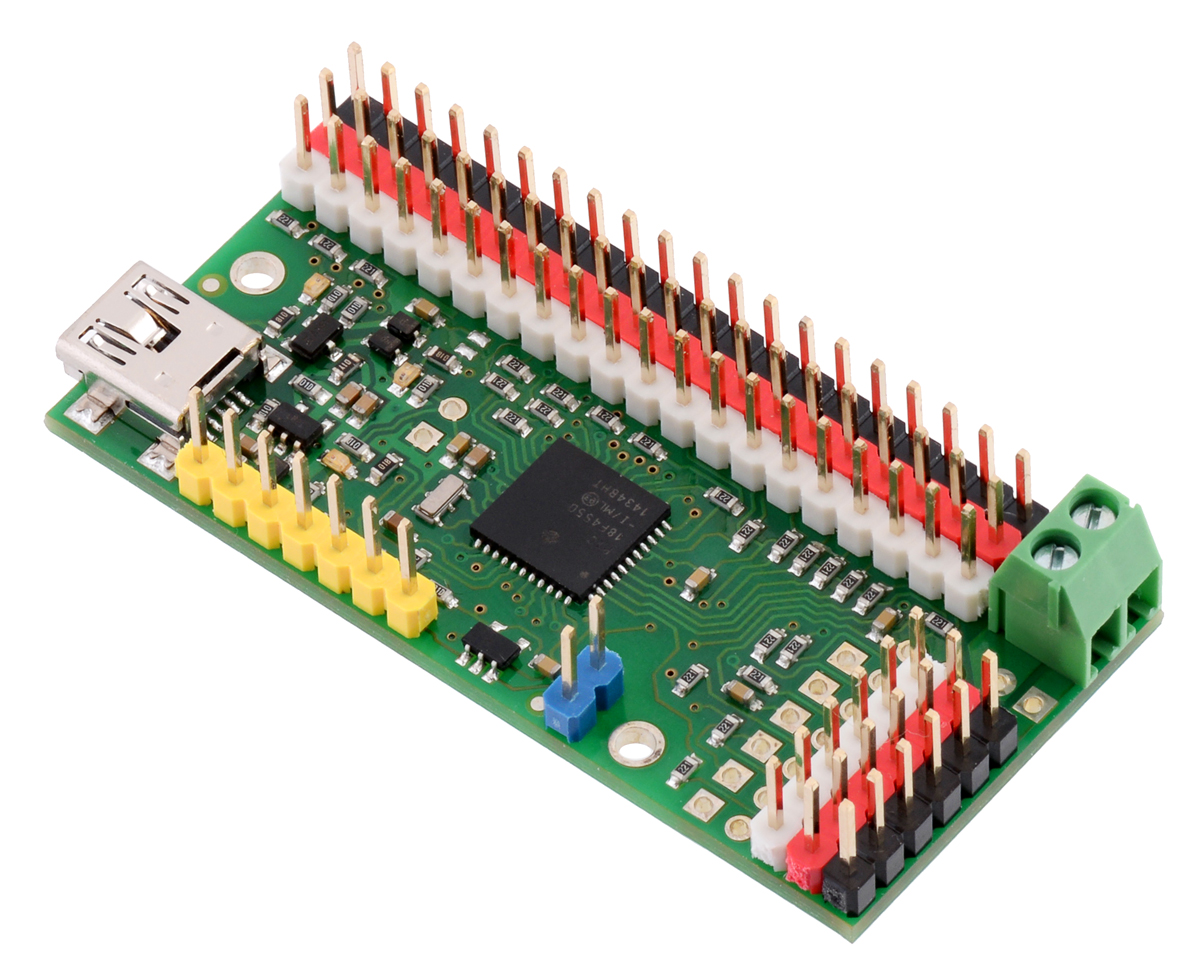 |
Like our venerable black breakaway male header strip, these strips are 40 pins long, but they can easily be cut or broken into smaller strips that work with standard 0.1″-pitch through-holes, female connectors, and breadboards.
We also now have right angle male header strips available in 2 rows or 3 rows:
|
|


We are particularly excited about the 3×40 right angle header because it can be used with the partial kit versions of our Maestro servo controllers to make low-profile modules where the servos plug in from the side rather than the top.
Related products











Jeremy's line following robot: Zumo Slim
I recently competed in the LVbots line following robot challenge, where I took third place with the fourth fastest robot (due to lucky placement in the bracket). This was my second line following competition. I learned some valuable lessons from my first competition, such as bigger motors are not always good for going faster, so I focused my build on making a lightweight robot this time. Continued…
New distributors in Turkey
We have not been keeping up with announcing our new distributors on the blog, and I will be trying to catch up over the next week or two. To start with, I am excited to welcome two new Pololu distributors located in Istanbul, Turkey!
 |
 |
Robot Kutusu (officially Robkut Robot Teknolojileri Elektronik ve Otomasyon) is a distributor of Arduino, Raspbery Pi, and many other electronics and robotics products. They are now carrying a number of Pololu products, including wheels, motors, stepper motors, and the Zumo and 3pi robots.
F1 Depo and Robot Kutusu join our five other Turkish distributors. See the full list of over 200 distributors to find one in your area.
MyoWare muscle sensor Kickstarter
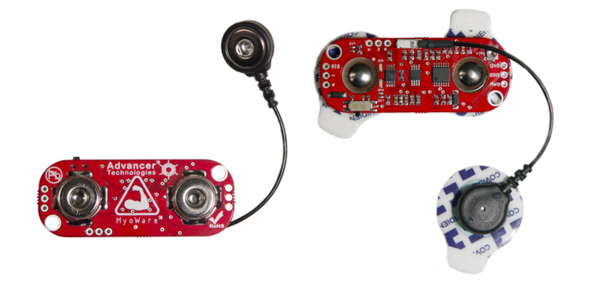 |
Advancer Technologies has launched a Kickstarter campaign for their MyoWare muscle sensor. Like its predecessor, the Muscle Sensor v3 (which we started carrying last year), the 4th-generation MyoWare is designed to measure the electrical activity of a muscle and output an analog signal that indicates how hard the muscle is being flexed. It will feature a number of improvements compared to the older sensor, including single-supply operation (no need for a negative voltage supply) and built-in snap connectors for electrodes.
These sensors create interesting possibilities by enabling muscle-controlled interfaces to be added to various projects. They have notably been used in prosthetic arms made for and donated to children by Limbitless Solutions, who received some attention recently as one of their arms was delivered to its recipient by none other than Tony Stark (actor Robert Downey Jr.)! To help their mission, Advancer Technologies plans to donate a MyoWare sensor to Limbitless for every five backers of the Kickstarter project.
To learn more about the MyoWare sensor and support the project, visit its Kickstarter page.
Claire's line following robot: Oddish
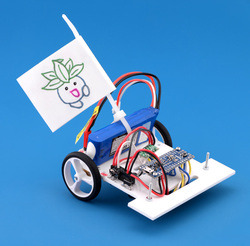
A few weeks ago the local robotics club, LVBots, hosted a line following competition here at Pololu, and like many of the engineers here, I built a robot, which I named Oddish, for the competition. I really only started seriously working on my robot about a week before the competition, so when I made the final decisions about what components to use I aimed for simplicity. In the last year we have come out with several A-Star microcontroller boards that include switching regulators, so I thought it would be fun and simple to make a line follower using an A-Star as the brain and its built-in 5 V regulator to power all the other components. I chose the A-Star 32U4 Mini LV for its operating voltage range and size. Continued…
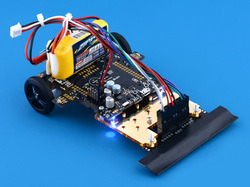
Brandon's line following robot: The Chariot

For the recent LVBots line following competition, my first instinct was to try to come up with some unique alternative design for a robot that would be competitive with the traditional differential drive robots. However, I knew the winning robot from the last LVBots line following competition (Mostly Red Racer) would be returning, and it had an impressive time to beat. I also remembered spending so much time designing and assembling the hardware for my last line following robot, that I ended up not having enough time to tune the PID coefficients and get the performance I was hoping for. After brainstorming a few ideas, I ended up deciding to keep it simple and make sure I had enough time to get a robot I was happy with, which I ultimately named “The Chariot” because of its shape. The Chariot ended up winning second place in the competition, which I was very happy with. Instead of focusing this blog post on how you can make your own version of The Chariot, I will try to explain my thought process throughout the design and build process, In other words, my hope is that after reading through this post, it will be clear why I chose the parts that I did. Continued…
Jon's line following robot: Usain Volt 2.0

Like other developers and engineers here, I made a robot for the LVBots Line Following Contest. This post describes my robot, Usain Volt 2.0, and details some of what I was thinking when I designed it. If you want to know more about the competition rules and how it was judged, see the LVBots line following rules. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










