Pololu Blog »
Pololu Blog (Page 52)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Charlie, the cricket
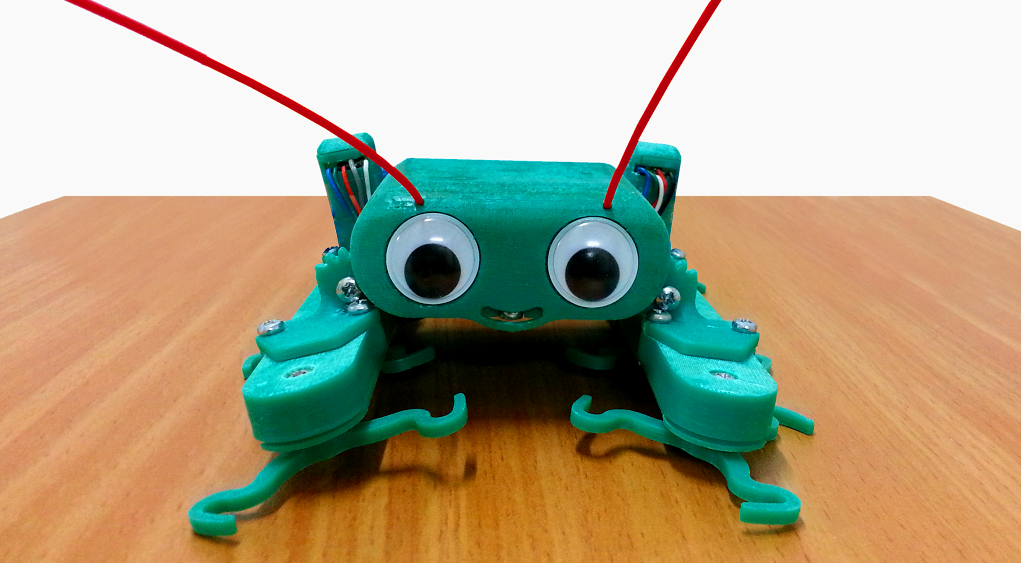 |
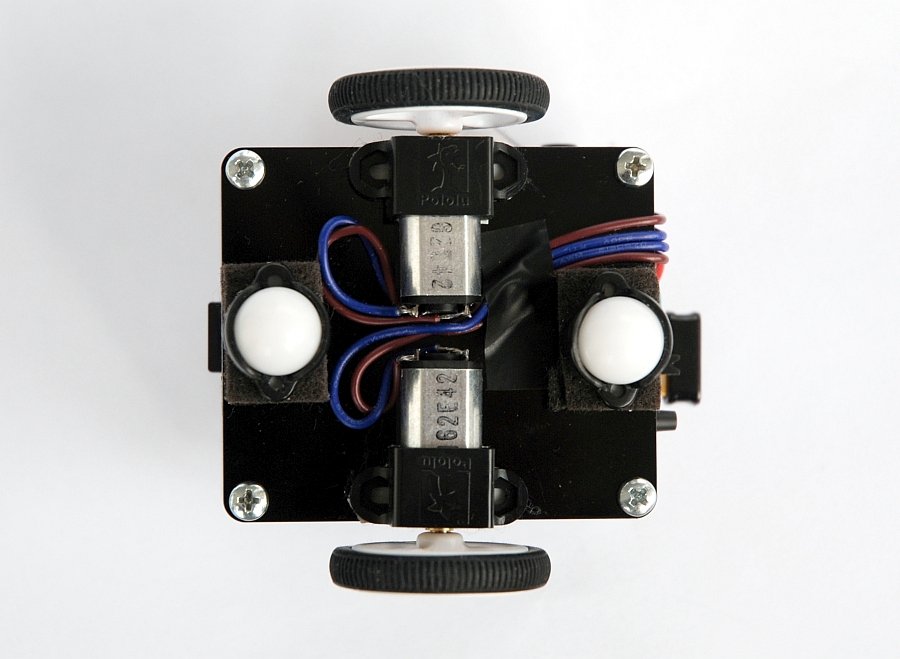
Jonathan Spitz made a fun robot he calls Charlie, the cricket. In his LinkedIn post, Jonathan explains that Charlie uses four motors. Two of the motors are used for walking and the other two are used for sprawling. The four motors are controlled by two Baby Orangutans, which also handle the closed-loop feedback from encoders to free up processing on the Arduino Micro.
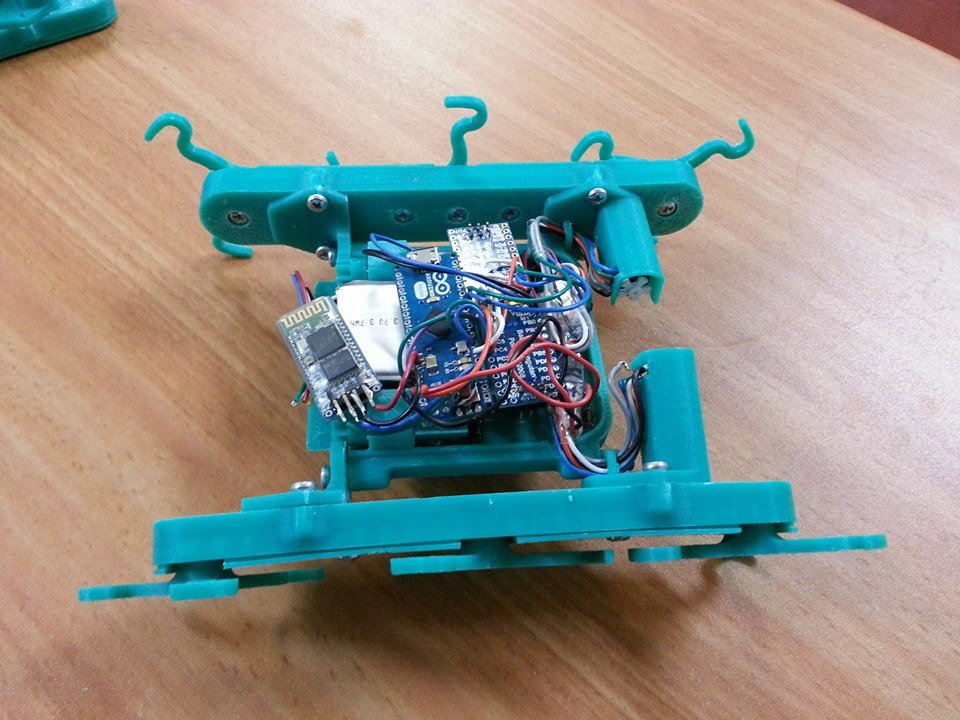 |
The insides of Jonathan Spitz’s Charlie, the cricket. |
|---|
Charlie’s novel propulsion system of spinning legs that can be tilted was inspired by one of Jonathan’s colleagues. They allow Charlie to traverse difficult terrain as shown in this video:
Charlie is a follow-up design on an earlier robot Jonathan made named Billy, the blue beetle, which was larger and lacked the ability to sprawl. Charlie also was designed to have the ability to drive on its back, which is something Billy could not do. You can read about Jonathan Spitz’s experiences with Billy in his LinkedIn post.
Related products

On losing my baby

This blog post is about some personal difficulty I’m going through: last month, my baby died unexpectedly a day or two before he was born. I could just collect my thoughts in my private journal, but I am sharing my experience here on the Pololu blog because most of the people I interact with and care about are related to Pololu, be they friends, employees, vendors, or customers. Just about everyone at Pololu knew of my eager anticipation of this new baby, and any visitors were aware that I might miss our meetings with short notice depending on when the baby arrived. Continued…
PiBot-A: mobile robot with a Raspberry Pi
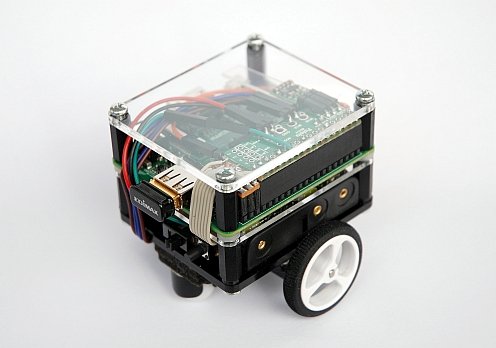 |
Thomas Schoch, who previously built the PiBot-B we blogged about, built another robot with a Raspberry Pi. His robot, the PiBot-A, uses our DRV8835 Dual Motor Driver Kit for Raspberry Pi B+ with a Raspberry Pi Model A+ to control two 100:1 Micro Metal Gearmotors. The robot also uses our S7V7F5 Switching Step-Up/Step-Down Regulator to supply the Raspberry Pi with 5 V from the motor power supply, allowing the whole robot to be powered form a single source.
|
|
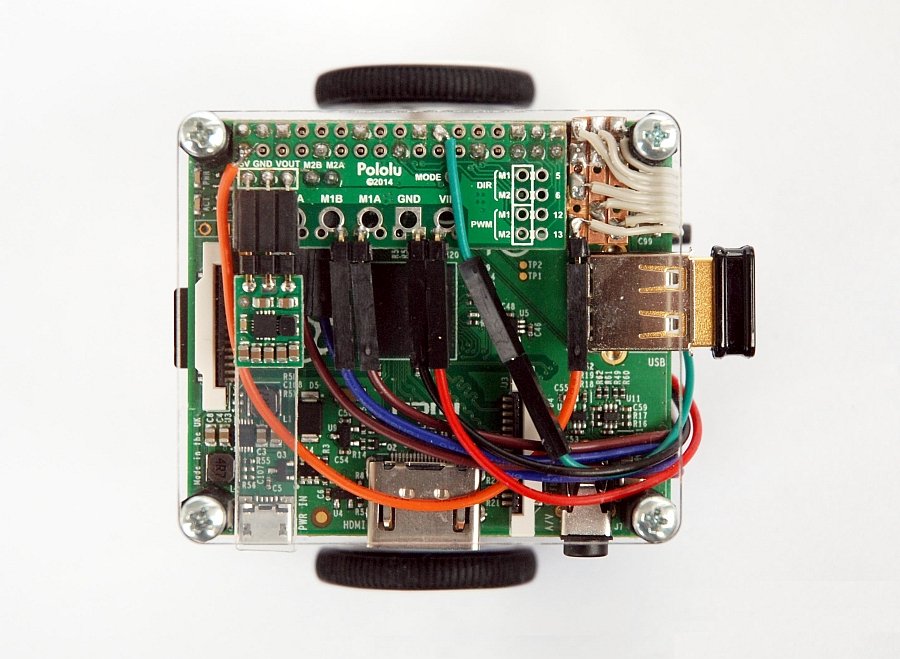
The PiBot-A is controlled by a Web-App from Thomas’s iPhone. It communicates over WiFi to the Raspberry Pi, which is running lighttpd and PHP. The Python program on the PiBot-A uses the WiringPi library to send signals to the motor driver kit to drive two 100:1 Micro Metal Gearmotors that are connected to the chassis with our Micro Metal Gearmotor Brackets. Thomas also added an array of Sharp digital distance sensors to give the robot obstacle detection. You can find a video of the PiBot-A avoiding boxes below:
For a complete write-up of the robot, check out the PiBot-A page. It is written in German, but it has a link at the top to translate it into English using Google Translate.
11 February 2015 update: Thomas added support for our QTR-3A Reflectance Sensor Array to his PiBot-A to make a line follower and posted about it on Let’s Make Robots. The sensor array is interchangeable with the array of Sharp digital sensors used for obstacle detection. You can find a video of his robot following a line below:
Related products


New product: iMAX B6AC V2 Balance Charger and Discharger
 |
We have carried the iMAX B6AC charger from SkyRC for many years and often use it to charge batteries for our own projects and robot contests, so we are happy to now be carrying the upgraded iMAX B6AC V2 Balance Charger and Discharger. Both versions of the iMAX B6AC are capable of charging or discharging NiMH, NiCd, Pb, LiPo, Li-ion, and LiFe batteries and can be powered either from AC mains power or a DC input. The new version of the charger has all the same advanced features as the original, like individual cell balancing for up to 6 lithium cells, delta-peak sensitivity, and cyclic charging and discharging. In addition, version two of the charger is more accurate, more stable, and has many new features. Some of the new features include a Micro-USB connection for interfacing with SkyRC’s ChargeMaster PC software and upgrading the firmware, user control over the final battery voltage when charging, individual lithium cell voltage display, and an internal resistance meter.
 |
Bottom view of the iMAX B6AC V2 showing the holographic label with scratch-and-reveal security code. |
|---|
There are many counterfeit chargers that look almost identical to SkyRC products, so as with the first version, we buy these directly from SkyRC and take care to ensure that our units are genuine. If you would like to double check the authenticity of the iMAX B6AC V2 that you receive, you can reveal the security code under the scratch-and-reveal portion of the holographic label on the bottom of the charger and enter it on the SkyRC web site.
Need batteries for your charger? While we do carry some basic NiMH cells and packs, we recommend that you check out the options at local stores and online, since government restrictions, shipping, and storage issues make this a tough area for a small business to compete in. For larger packs and lithium batteries in particular, there are a number of hobby supply stores shipping from Hong Kong or China that provide excellent options.
For more information about the iMAX B6AC V2 and its features, please see its product page.
Related products


Custom car ventilation system with Pololu servo controller
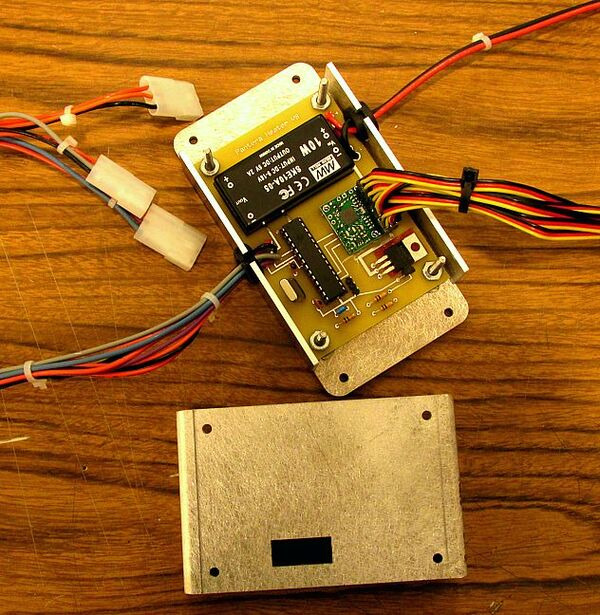 |
One of our customers, Gary, made a heater box and ventilation system for a custom car and posted about it on our forum. His system uses several servos controlled by one of our Micro Serial Servo Controllers. The servos actuate the different valves in his air system to allow him to control the air source as well as things like the defog/defrost system.
 |
Some of the actuated valves on a custom heater box made for a custom car by Gary. |
|---|
Gary chose to use our board because it allowed him to stop sending signals to the servos when they are not moving. For others considering using our Micro Serial Servo Controller in their next project, we recommend using our Maestro servo controllers instead. They have the ability to stop sending signals to the servos like the Micro Serial Servo Controller and are newer and better in almost every way.
You can find more pictures and read more about Gary’s heater box and ventilation system in his post on our forum.
Related products

Maestro Servo Controller Arduino library
It has always been possible to control your Maestro Servo Controller from your Arduino-compatible controller with the Maestro’s serial interface, but now it is easier to get started using our new Arduino library. The library implements (and documents) all of the serial commands available on the Maestro controllers and supports all three sub-protocols (Compact, Pololu, and MiniSSC). Continued…
Odin sculpture and laser-cut model
DeWitt Godfrey, a sculptor and professor at Colgate University, used our custom laser cutting service to create a 15% scale polystyrene prototype model before moving on to the final full-sized sculpture. The final installation, located on the Colgate campus, measures approximately 40′ × 20′ and weighs 13 tons. In the video above, the styrene model appears at 2:10, and again at 2:40. You can also see a time-lapse video of the sculpture’s installation here.
 |
15% scale model of Odin, a sculpture by DeWitt Godfrey. |
|---|
 |
Interior photo of a 15% scale model of Odin, a sculpture by DeWitt Godfrey. |
|---|
Related products

Maestro-controlled Spider Dress 2.0 at CES 2015
 |
This week at the Consumer Electronics Show, some of our engineers got to see Spider Dress 2.0, which was being exhibited by its designer, Anouk Wipprecht, at the Intel booth. The dress is designed to react to invasions of the wearer’s personal space with threatening insect-like legs controlled by servos. Two Maxbotix proximity sensors are used to detect movement, and two 12-channel Maestro servo controllers (one under each shoulder pad) control the response of the legs. The whole dress is controlled by an Intel Edison.
|
|


Anouk explains the dress in detail in this video, which was produced by Make, and features a brief cameo by yours truly:
You can learn more about Spider Dress 2.0 in this Make article, and about Anouk and her work by visiting her website.
Related products

Pololu and LVBots CES Open House 2015
 |
Are you attending CES or in Las Vegas this Thursday evening? Join Pololu and LVBots on Thursday, January 8th any time from 5 p.m. to 8 p.m. for CES Open House 2015! Like last year, LVBots members will be showcasing their robotics and electronics creations, Pololu will be giving tours of our manufacturing and other operations, and you can present your company or your projects. We will provide pizza. Registration and other details are on the LVBots Meetup page.
New product: A-Star 32U4 Prime SV
 |
It has been snowing on and off today in Las Vegas, but luckily the weather was not bad enough to delay our last product release of 2014: the A-Star 32U4 Prime SV. We hope that this and the other A-Stars we released this year will help bring success to your projects in 2015. Thanks for your business and support in 2014, and Happy New Year!
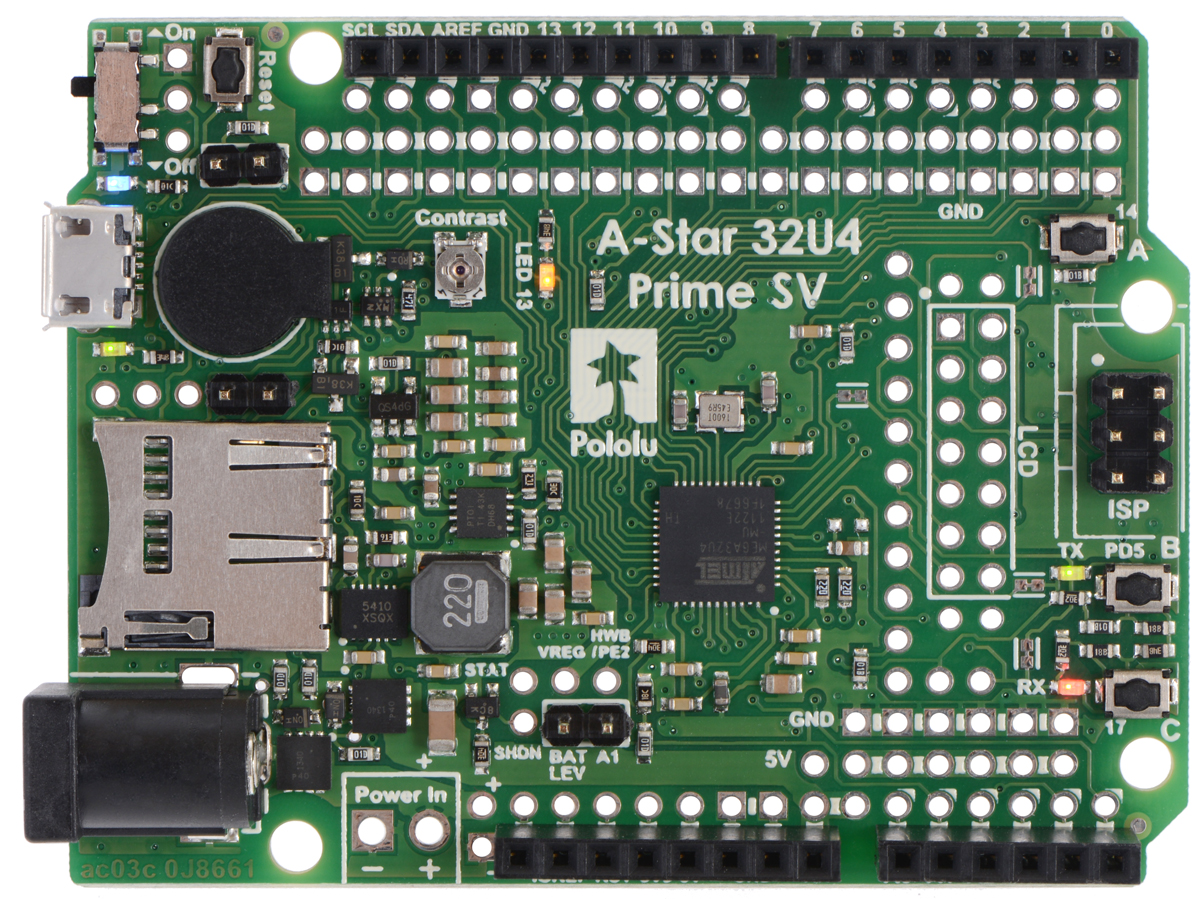
The A-Star 32U4 Prime SV, our newest A-Star, is an Arduino-compatible board with a switching regulator that allows an input voltage range of 5 V to 36 V. Like the A-Star 32U4 Prime LV we released earlier this month, the A-Star 32U4 Prime SV shares the pinout and form factor of the Arduino Leonardo and should work with compatible shields.
 |
What really sets the A-Star 32U4 Primes apart from competing products is their power supply system based on high-efficiency switching regulators, which allow plenty of power to drive your microcontroller and lots of peripherals over a large range of input voltages. The A-Star 32U4 Prime SV uses the Intersil ISL85410 1-Amp buck regulator, a more powerful relative of the regulator on A-Star 32U4 Mini SV. So you get 1 A at 5 V over most of the SV input voltage range. (We recommend an input voltage of at least 6 V.) And since a switching regulator draws less current as the voltage increases, you can get a lot more out of higher-voltage power supplies and battery packs. In a typical usage scenario, if you power your project with a 12 V battery, the A-Star 32U4 Prime SV will draw about half the current of a competing product with a linear regulator – and last twice as long on a single charge.
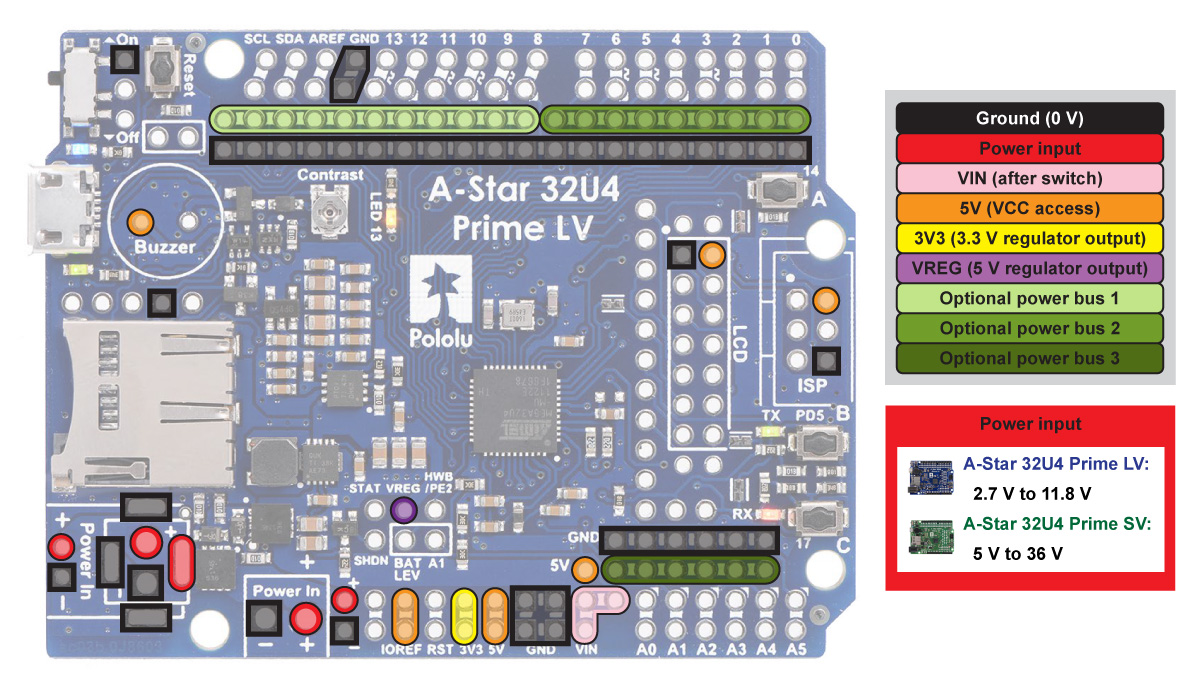 |
A-Star 32U4 Prime power distribution diagram (original ac03b version). |
|---|
Like the A-Star 32U4 Prime LV, the SV has a bunch of features designed to make it easy for you to make use of the power. The TPS2113A USB power mux allows you to safely and seamlessly switch between a battery and USB power (up to 1.5 A using a powerful enough USB supply), without the limitations of diodes or fuses. We included a handy power switch for your external power input, extra connection options in case you don’t want to use the standard DC power jack, extra access points for the important power nodes VIN, VREG, 5V, and 3V3, and big power and ground buses.
The A-Star 32U4 Prime SV includes all the same peripheral features as the A-Star 32U4 Prime LV: battery voltage monitoring, three user pushbuttons (sharing the MISO, RXLED, and TXLED lines), a buzzer optionally controlled by digital pin 6, a connector for an HD44780-based character LCD, and – on some models – a microSD card slot that works with the Arduino SD library. Here is an SV with all the optional peripherals installed:
 |
You can purchase this configuration pre-assembled as Pololu item #3115, or get it with almost everything but the LCD as Pololu item #3114. (You can still install an LCD yourself later.) For other configuration options, please see the individual product pages below or the A-Star 32U4 Prime SV category page.
Related products









Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









