Pololu Blog »
PiBot-A: mobile robot with a Raspberry Pi
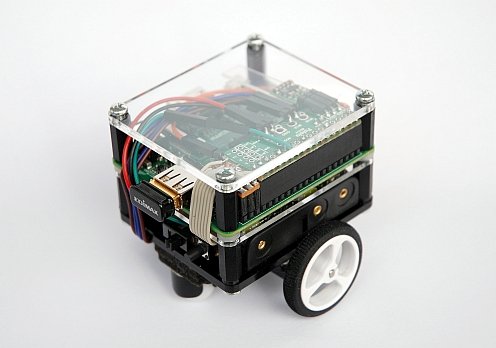 |
Thomas Schoch, who previously built the PiBot-B we blogged about, built another robot with a Raspberry Pi. His robot, the PiBot-A, uses our DRV8835 Dual Motor Driver Kit for Raspberry Pi B+ with a Raspberry Pi Model A+ to control two 100:1 Micro Metal Gearmotors. The robot also uses our S7V7F5 Switching Step-Up/Step-Down Regulator to supply the Raspberry Pi with 5 V from the motor power supply, allowing the whole robot to be powered form a single source.
|
|
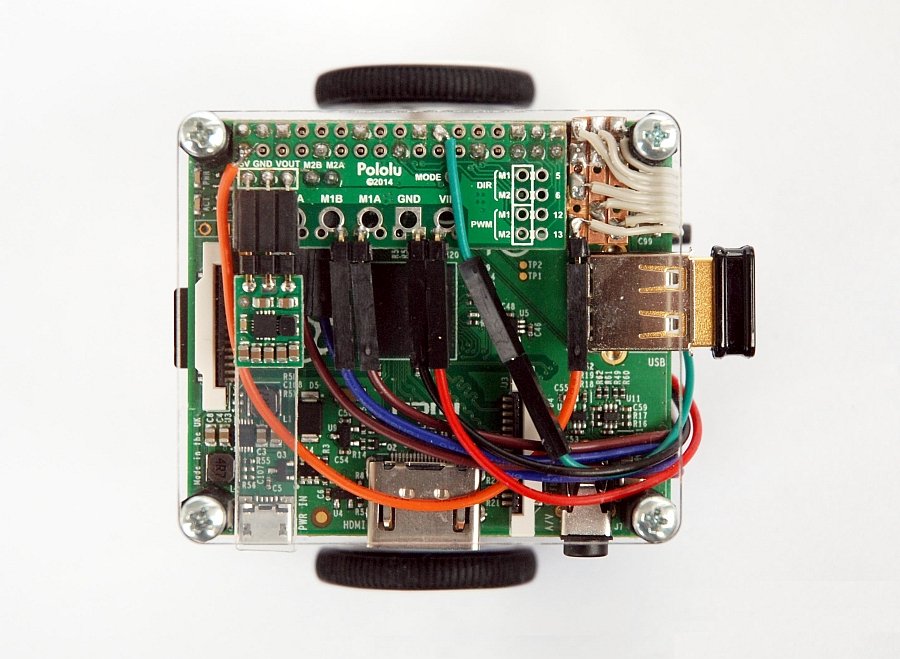
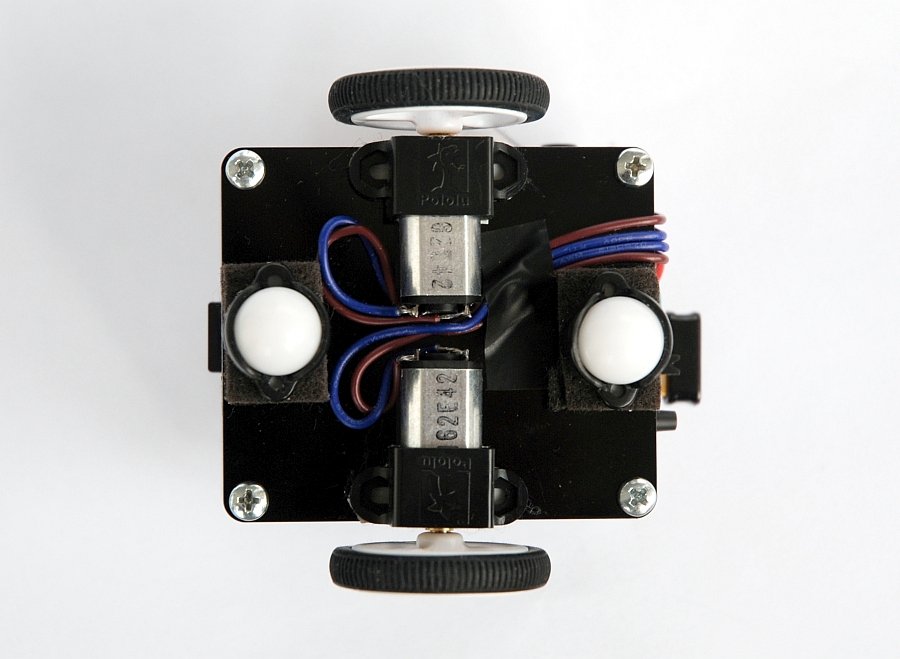
The PiBot-A is controlled by a Web-App from Thomas’s iPhone. It communicates over WiFi to the Raspberry Pi, which is running lighttpd and PHP. The Python program on the PiBot-A uses the WiringPi library to send signals to the motor driver kit to drive two 100:1 Micro Metal Gearmotors that are connected to the chassis with our Micro Metal Gearmotor Brackets. Thomas also added an array of Sharp digital distance sensors to give the robot obstacle detection. You can find a video of the PiBot-A avoiding boxes below:
For a complete write-up of the robot, check out the PiBot-A page. It is written in German, but it has a link at the top to translate it into English using Google Translate.
11 February 2015 update: Thomas added support for our QTR-3A Reflectance Sensor Array to his PiBot-A to make a line follower and posted about it on Let’s Make Robots. The sensor array is interchangeable with the array of Sharp digital sensors used for obstacle detection. You can find a video of his robot following a line below:
Related products


-

New product: iMAX B6AC V2 Balance Charger and Discharger
- 16 January 2015We have carried the iMAX B6AC charger from SkyRC for many years and often use it to charge batteries for our own projects and robot contests, so we...
-

On losing my baby
- 5 February 2015This blog post is about some personal difficulty I’m going through: last month, my baby died unexpectedly a day or two before he was born. I could...
4 comments

Thanks for replying

We did not make the robot in this post, and we do not sell it. You could look at the PiBot-A's project page, which is linked just below the "PiBot-A - Obstacle Avoider" video, to get an idea of how to build the custom robot or something similar. The PiBot-A's page contains some code and a list of parts used to make it, which might help get you started. (The project page is written in German, but you could use Google Translate to translate the page.)
- Amanda


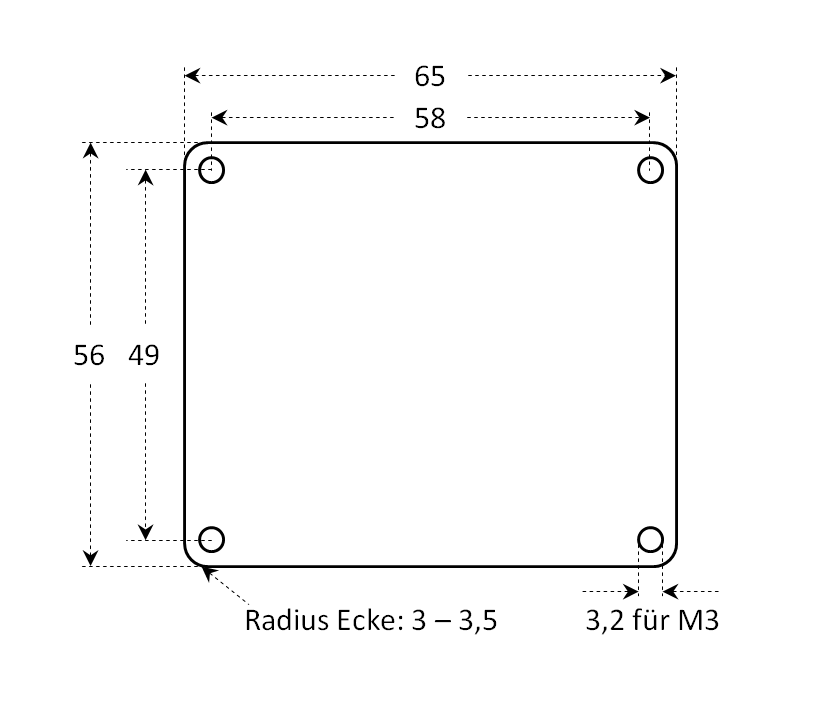
Thanks for the suggestion. We have a few laser-cut plates that would probably work with the Rasberry Pi, but nothing in that exact size. We'll keep your suggestion in mind! For now, you could check out our custom laser cutting service.
- Grant
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation

{kind=link}