Pololu Blog »
Pololu Blog (Page 56)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Ascending/descending spider
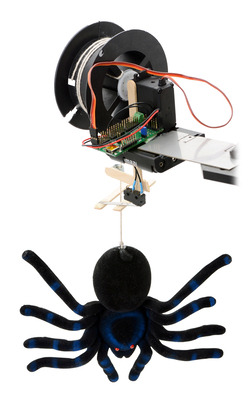
This animated spider prop takes a traditionally static Halloween display to new heights! The setup is simple: a Maestro servo controller and a continuous rotation servo raise and lower a spider with the help of a limit switch. Continued…
New products: Six new Mini Plastic Gearmotors
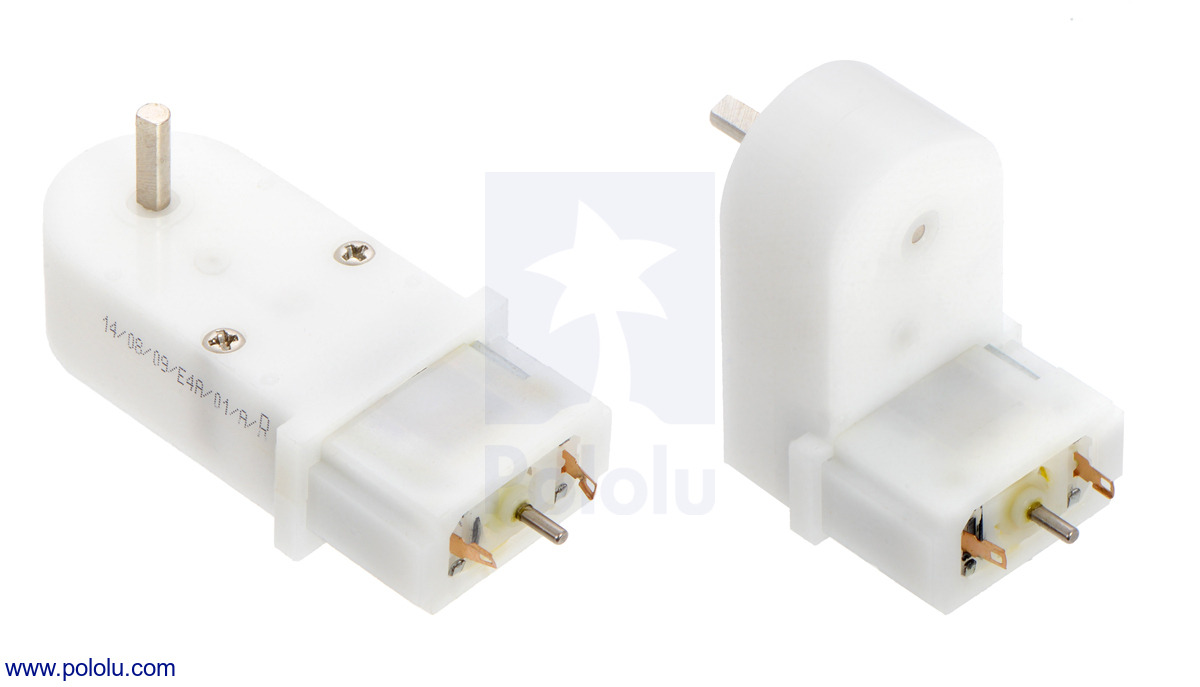 |
Our family of Mini Plastic Gearmotors is growing! We have added HP versions with more powerful motors for increased torque and speed, and we are now carrying versions with extended motor shafts intended for use with custom encoders for motor speed and position feedback. (These extended-shaft versions are not compatible with the magnetic encoders we just released for our Micro Metal Gearmotors; we will have a similar encoder solution for these plastic gearmotors at some point, but for now we are offering them for people who want to make their own encoders.) The following table shows the current state of our Mini Plastic Gearmotor family:
| Motor Type | Stall Current @ 4.5 V |
No-Load Speed @ 4.5 V |
Stall Torque @ 4.5 V |
 90° output |
 90° output + motor shaft |
 offset output |
 offset output + motor shaft |
|---|---|---|---|---|---|---|---|
| high-power (HP) |
1250 mA | 150 RPM | 25 oz-in | 120:1 mini HP | 120:1 mini HP | 120:1 mini HP | 120:1 mini HP |
| low-power | 800 mA | 120 RPM | 20 oz-in | 120:1 mini | 120:1 mini | 120:1 mini | 120:1 mini |
| 80 RPM | 30 oz-in | 180:1 mini | 180:1 mini |
We are particularly excited about these gearmotors because they offer a great combination of performance and affordability; don’t be surprised if you find these motors in some of our future robots and robot kits! For more information about all of these gearmotors, see our Mini Plastic Gearmotors category.
Related products




Scary shaking tombstone
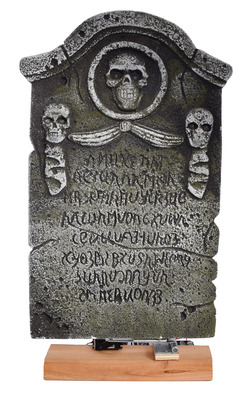
Before we started our Halloween projects, several of the Pololu engineers took a trip to a local Halloween store to get inspired. At the store there was a wall lined with the polystyrene foam tombstones that are meant to be stuck into your front lawn. They immediately made me think of the graveyard outside the haunted mansion at Disneyland, and I knew that I wanted to make one of them shake and scream. For added effect, I also picked one that had a few skulls on it, so I could place red LEDs in the eyes. Below are some of the details that went into making the project so far. Continued…
New products: Pololu Carriers for Sharp GP2Y0A60SZLF Analog Distance Sensor
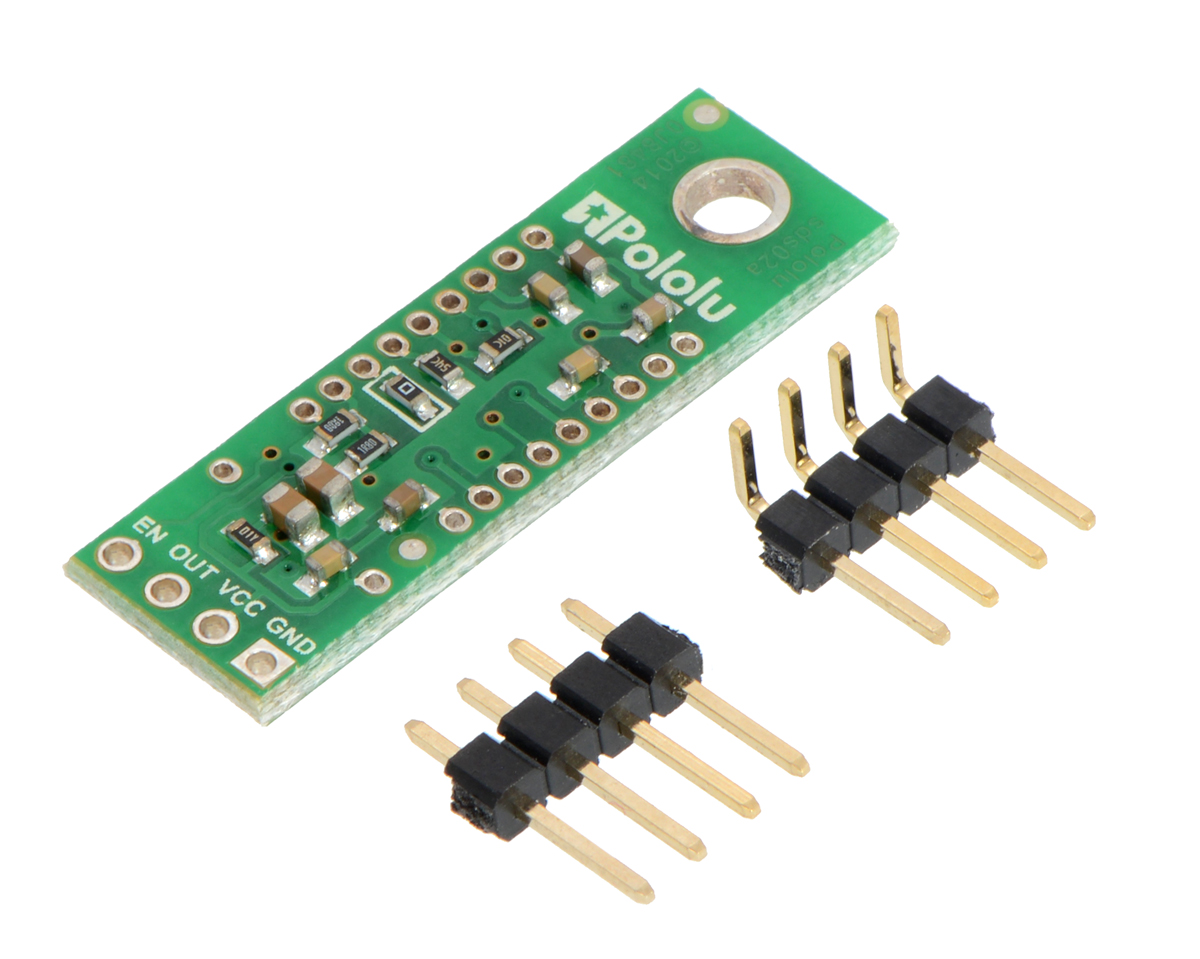 |
Last month, we introduced our new carriers with Sharp GP2Y0A60SZLF analog distance sensors, a part we are very excited about and have been trying to get for the past five years. Those complete sensor modules ship with the GP2Y0A60SZLF installed on our compact carrier board, which includes all of the required external components and provides a more convenient interface to the sensor (and a mounting hole!). Well, we are now offering the carrier boards without the sensor for those who already have Sharp GP2Y0A60SZLF units and are looking for an easy way to incorporate them into their projects. The carrier boards are available in two configurations: a 5V version for operation from 2.7 V to 5.5 V and a 3V version for operation from 2.7 V to 3.6 V:
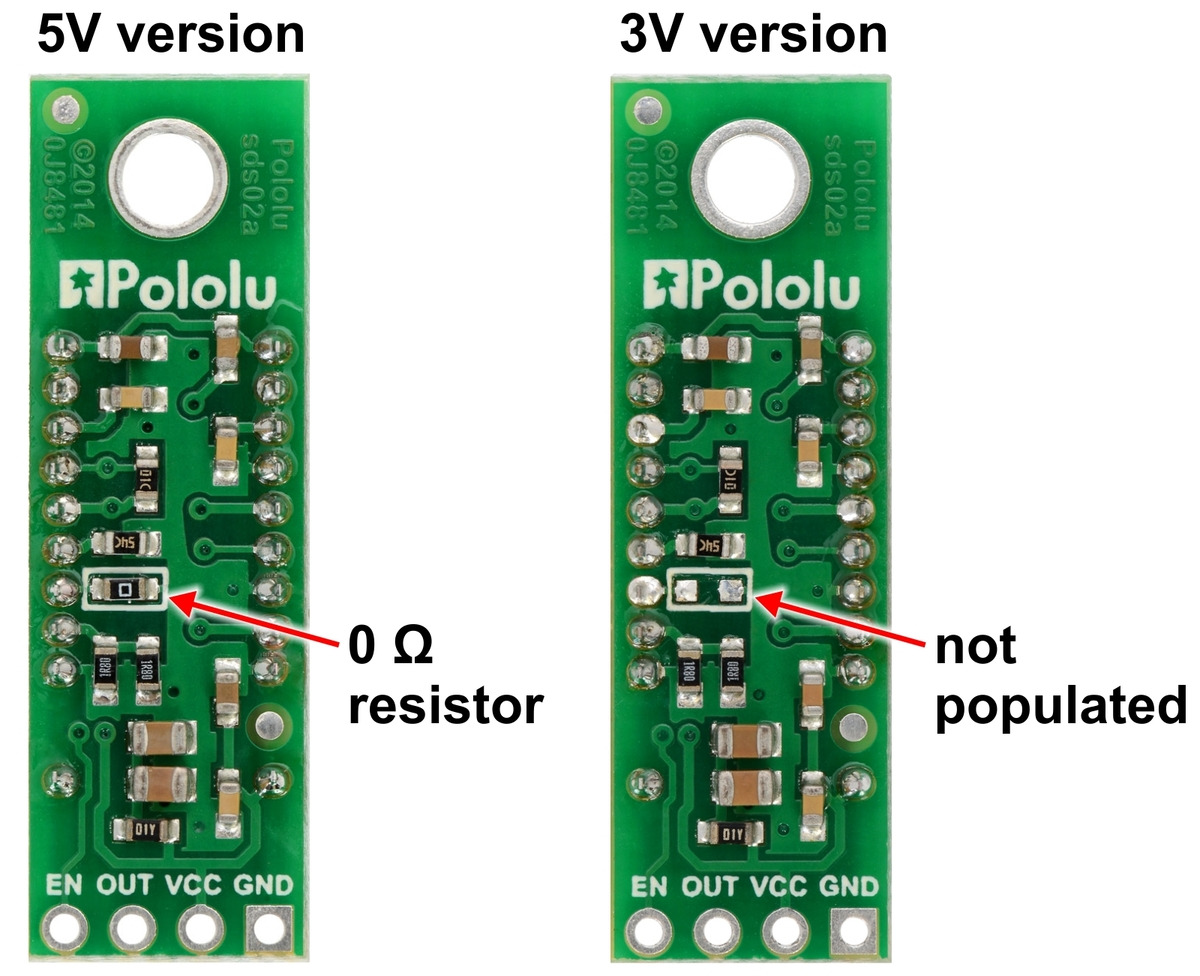 |
For more information, see the product pages.
Related products



Free magazines: October 2014 Circuit Cellar and Elektor
|
|

Get FREE copies of Circuit Cellar magazine’s October issue and Elektor magazine’s October issue with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT1014 and ELEKTOR1014 into your shopping cart. Each magazine will add 6 ounces to the package weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers and free Elektor magazine offers.


Inflatable ghost

After doing the creepy mask, I wanted to do something a bit more festive. This Halloween prop was inspired by those inflated decorations people put on their lawns. In this case, I wanted something a bit smaller since I wanted it to fit indoors. I also wanted to use one of our addressable 8mm RGB LEDs, so I could make it light up all sorts of colors instead of just a single color like I had often seen. I decided to make an inflatable ghost because I wasn’t sure I would be able to control the shape that well and figured a ghost would give me more leeway in shape. Continued…
Simple Animatronic Skull
If you have been following our blog, you have seen some fun and scary Halloween projects posted by my coworkers here at Pololu. Well, this is the first part of my prop for my costume for this upcoming Halloween. After watching an animatronic devil baby terrorize New York City, I knew I wanted to build a similar demon baby that would be attached to me with a baby carrier. Continued…
Ghastly gas ghost

This project turns a innocent-looking ghost decoration into an ambush in wait for unsuspecting passersby. The basic idea is straightforward: whenever someone walks within a few feet of the ghost’s face, it blasts them with a terrifying burst of compressed gas. Continued…
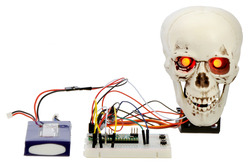
Motion tracking skull Halloween prop

If you read Grant’s Creepy eyes Halloween prop post, then you already know that several of us here at Pololu are working on Halloween projects. I based my project on a motion tracking Halloween prop tutorial by Jason Poel Smith that I saw last year on the Make magazine website. The concept is simple: make a Halloween prop mysteriously follow an unsuspecting person as they walk by. The tutorial by Jason Smith uses photoresistors to track a person by detecting their shadow and moving a servo with a Halloween prop attached to it. This works well, but there are a few things that I thought could be improved. Continued…
Polo-BOO! Halloween Sale
 |
Halloween is just a few short weeks away, and that means it’s time to start making an awesome costume or building an extravagant yard display (unless you’ve already been hard at work on one for months). Whether you want to dress up or decorate your home, we offer lots of products that can make your projects stand out, so we’re having a Halloween sale to help you get the parts you need!
From now until October 22, you can get 10% off hundreds of products, from servos and LEDs to sensors and programmable controllers. Even bigger discounts of up to 30% are available on a few select items. See the sale page for more details and the full list of products.
As always, we would love to hear about anything cool you make with our stuff, so please share it with us via email or on our forum; we might feature it on the blog! This month, we’ll be posting a series of Halloween-themed projects of our own to help inspire you.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









