Pololu Blog »
Pololu Blog (Page 57)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New Product: 5V, 5A Step-Down Voltage Regulator D24V50F5
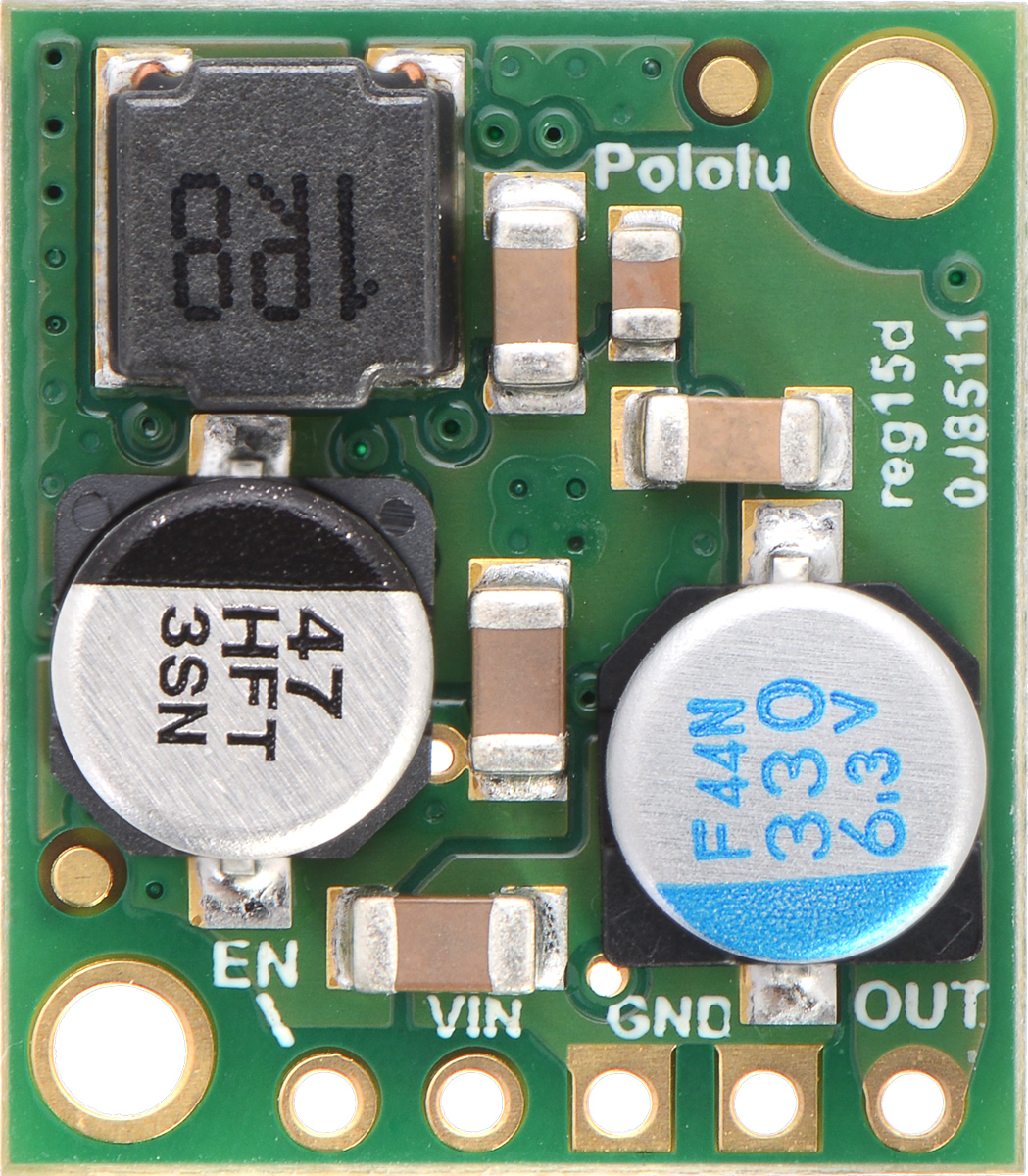 |
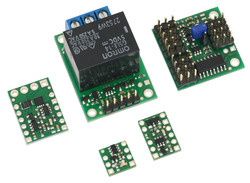
Remember the post I wrote two weeks ago about our tiny D24V25F5 voltage regulator and some of the testing that we did on it? Well, we were so happy with how that regulator turned out that we decided to make a higher-power version with a larger inductor and beefier MOSFETs. This new regulator is the D24V50F5, and while it is only 0.1″ bigger than its 2.5 A cousin, it can deliver 5 amps!
 |
Side-by-side comparison of the 2.5A D24V25Fx (left) and 5A D24V50F5 (right) step-down voltage regulators. |
|---|
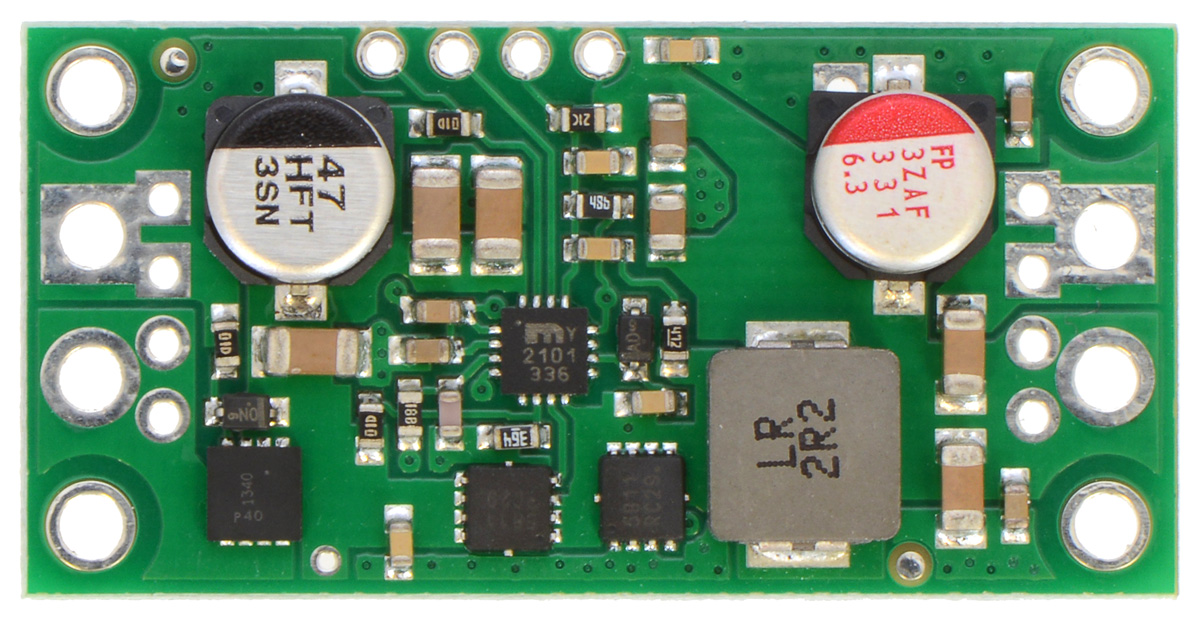
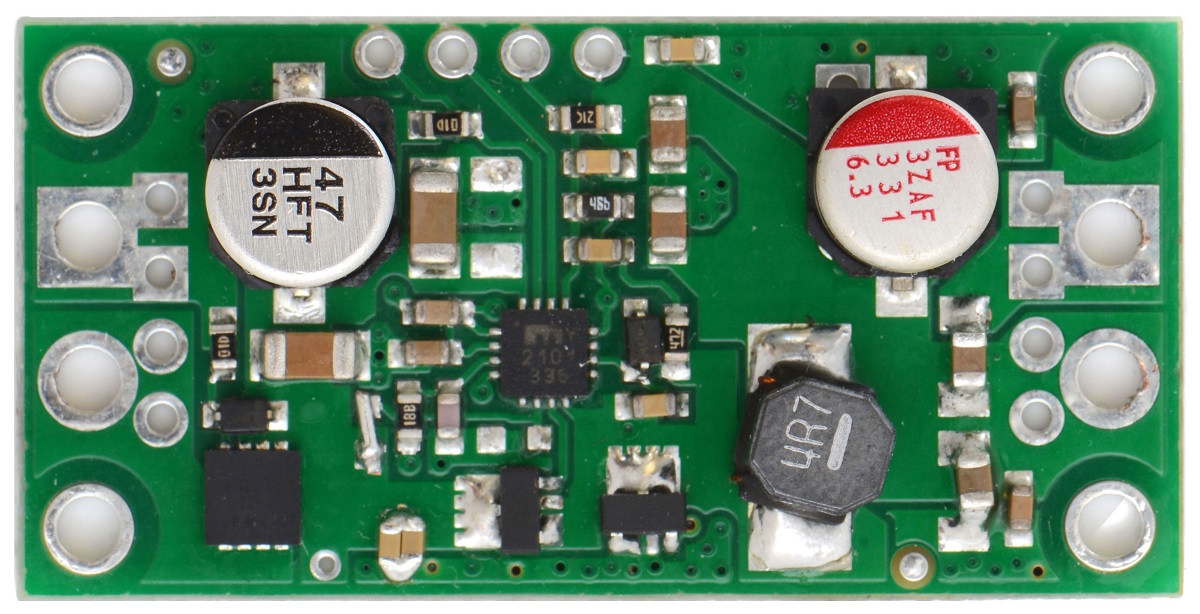
You can see the bigger MOSFETs on the bottom side:
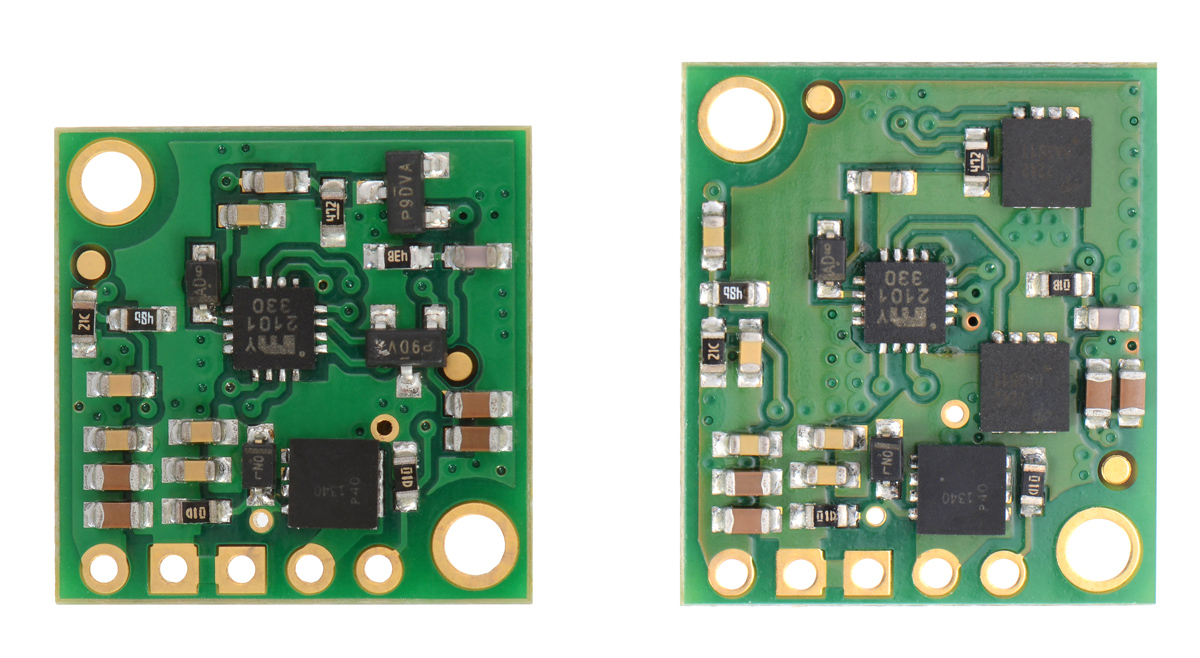 |
Comparison of the D24V25Fx (left) and D24V50F5 voltage regulators showing larger MOSFETs on the higher-power board. |
|---|
The D24V50F5 can also take inputs up to 38V and has typical efficiencies of 85% to 95%. It’s amazing how much power these little 3×3 mm MOSFETs can handle, and with its compact size and high power, this regulator is our new favorite.
Related products


Creepy eyes Halloween prop

In the lead up to Halloween, I thought it would be fun to make some Halloween-themed props; in particular, I was interested in making something creepy. What first came to my mind was one of those creepy portraits with moving eyes. To change it up a little, I decided to use a mask instead of a picture (which I thought would make it easier to hide the electronics). Down at a local store called Halloween City I picked up a cheap mask and some plastic eyeballs (though a more crafty person might just make their own mask and eyeballs). I made sure the mask was a bit stiff because I needed it to hold shape without actually having someone’s face in it. For the electronics in the project, I grabbed two sub-micro servos, a Micro Maestro, and a 4.8V battery pack. If you don’t have jumper wires it might also be helpful to get a pack of those, but this build only uses one to jump battery power to the Maestro’s logic power. Continued…
Community project: 2pi, a simple line following robot
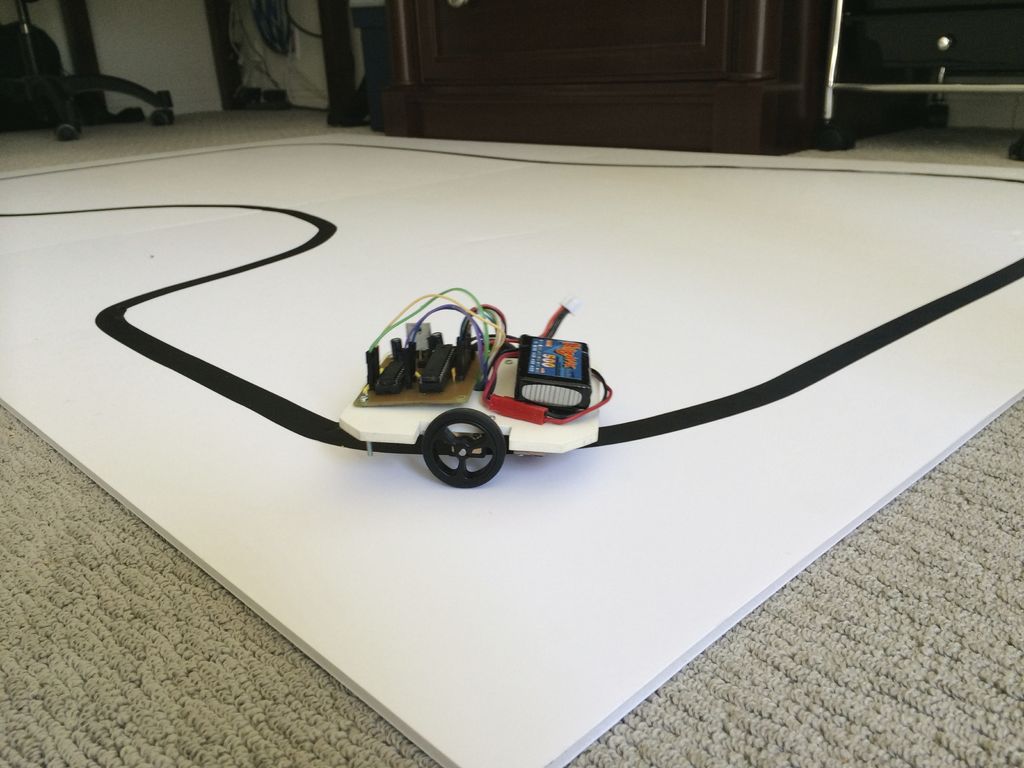 |
The 2pi, built by Mark Moran, is a line following robot based on our 3pi robot. The 2pi uses our 100:1 micro metal gearmotors, motor brackets, 32mm wheels, 1/2″ ball caster, QTR-8RC reflectance sensor array, and U3V12F9 switching step-up voltage regulator. All those components are mounted to a chassis that was cut from PVC foam.
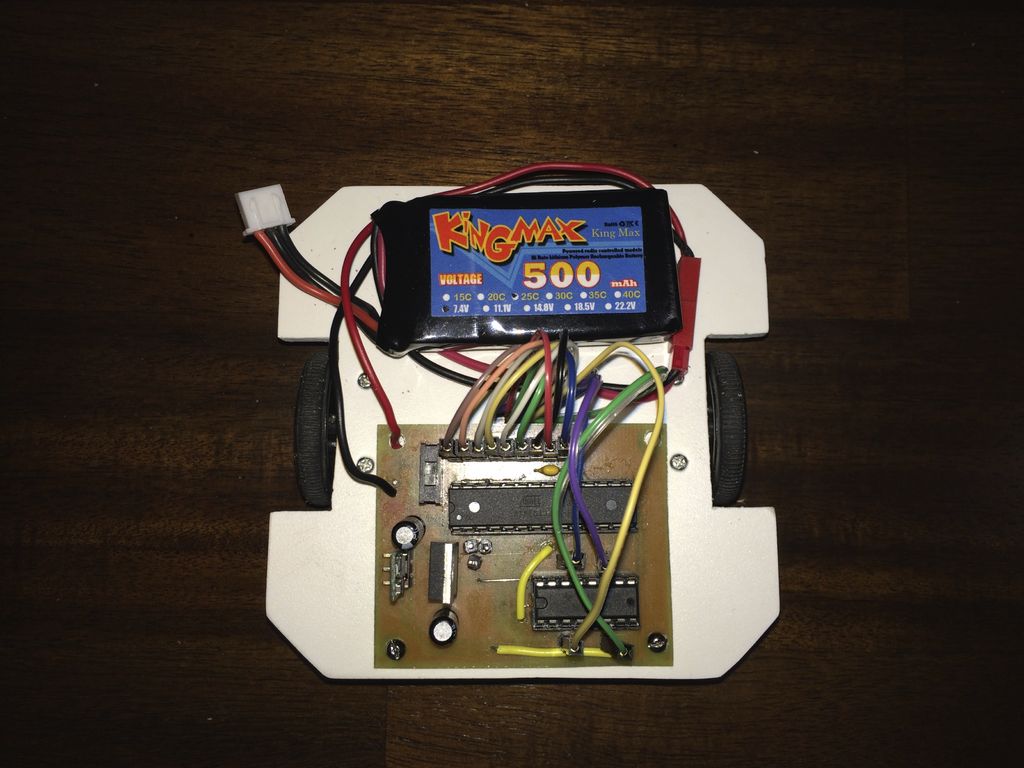 |
The robot uses a custom made PCB with an ATmega328 as the brain (the same AVR chip used in the Arduino Uno, some of our Orangutan Robot Controllers, and, of course, the 3pi). You can see the 2pi following a line in the video below.
For more information about how Mark built his robot, check out his Instructables guide.
Related products






New products: Magnetic quadrature encoders for micro metal gearmotors

Everyone wants encoders on their motors. If you think you don’t, you just don’t know it yet. I think the main reason is that we really just want motors to do what we tell them to do, but they don’t. One of the most common beginner questions we get is some variation of, “why doesn’t my robot go straight?” or “I got two of the same motor but they do not go the same speed; is something wrong with one of them?” More seasoned robot builders know that since there will always be variations in everything that contributes to a motor’s performance, our best hope is to put a sensor on the motor to monitor what is actually happening and then adjust the motor control to make reality better match our desires. Continued…
New product: Translucent Enclosure for Raspberry Pi Model B+
 |
We are now carrying a translucent enclosure for the Raspberry Pi Model B+!


Free magazines: September 2014 Circuit Cellar and Elektor
|
|
Get FREE copies of Circuit Cellar magazine’s September issue and Elektor magazine’s September issue with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT0914 and ELEKTOR0914 into your shopping cart. The Circuit Cellar magazine will add 6 ounces and the Elektor magazine will add 7 ounces to the package weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers and free Elektor magazine offers.


Big price reductions and new options for our popular stepper motor drivers

We recently substantially reduced prices on our stepper motor driver carriers, and I figured this announcement was a good time to give you an update on our perspective and capabilities.
It has been over five years since I designed our original stepper motor driver carrier, which was for the A4983 from Allegro. While fairly straightforward, the implementation reflected several design philosophies that go into Pololu products, such as making the boards as small as practical and including the right extra components to make the main chip easily usable without unnecessarily limiting its features. Continued…
New product: Addressable high-density RGB LED strip
 |
Last December we started carrying addressable RGB LED strips based on the WS2812B LED driver. Since that driver integrates an LED and a driver into the same package, we were able to offer higher density strips than before.
We are excited to announce that we are now carrying an even higher-density WS2812B LED strip. This strip has 72 LEDs and is 0.5 m long, for a density of 144 LEDs per meter. It is also the shortest WS2812B strip we carry.
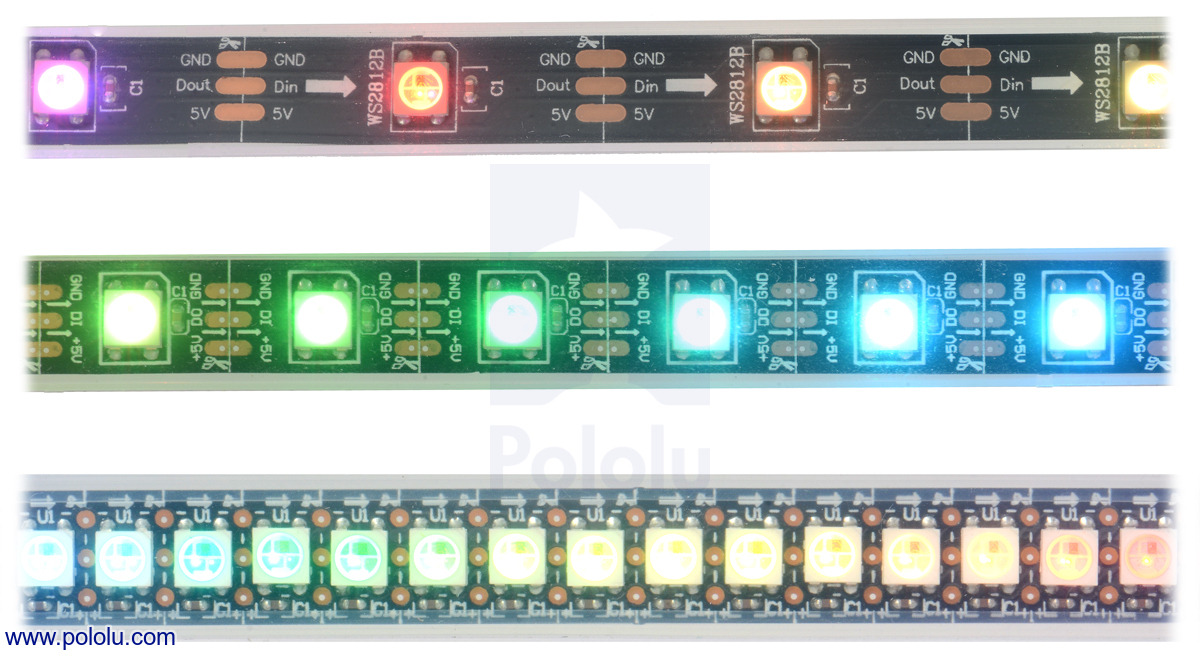 |
LED side of the WS2812B-based addressable LED strips, showing 30 LEDs/m (top), 60 LEDs/m (middle), and 144 LEDs/m (bottom). |
|---|
 |
A 1/2-meter, 72 LED addressable RGB LED strip on the included reel. |
|---|
This LED strip, like the other WS2812B strips we carry, has both input and output JST SM connectors, which make it easy to connect multiple strips together. It is compatible with many popular microcontrollers, and we provide Arduino libraries to help you get started. More information about this LED strip, including how to use it, can be found on its product page.
You can also view our entire selection of WS2812B LED strips.
Related products

Introducing RPicSim
RPicSim is an open source software library written in Ruby that provides an interface to the MPLAB X PIC simulator and allows you to write simulator-based automated tests of PIC firmware. While RPicSim has been available since early this year, we just released version 1.0.0 and are excited to share why we made it and to encourage people to start using it. Continued…
New product: 5V, 2.5A Step-Down Voltage Regulator D24V25F5
 |
Just about every integrated switching regulator datasheet I come across advertises how easy it is to use the chip, which is probably a good sign that it’s not necessarily that easy. I have designed several of our regulator boards, and for the most part, following the manufacturer recommendations and warnings about short traces and small loops led to working designs without much drama. But, as we push for higher performance, it can get tricky, and I thought I would share some fun pictures of what goes into troubleshooting a design that ought to work but did not.
This instance is about the D24V25F5 step-down regulator we just released today. It should have been straightforward because the basic circuit is very similar to that of the higher-power D24V60F5 and D24V90F5 regulators we released earlier this year. Because this board was supposed to be really small, I designed it with components tightly packed on both sides, which meant I had to make compromises on some of those trace lengths and loop sizes. It wasn’t even clear that the circuit would be routable with just two PCB layers, so when I did find a solution, the design team wanted to try it even though we knew we were pushing our luck.
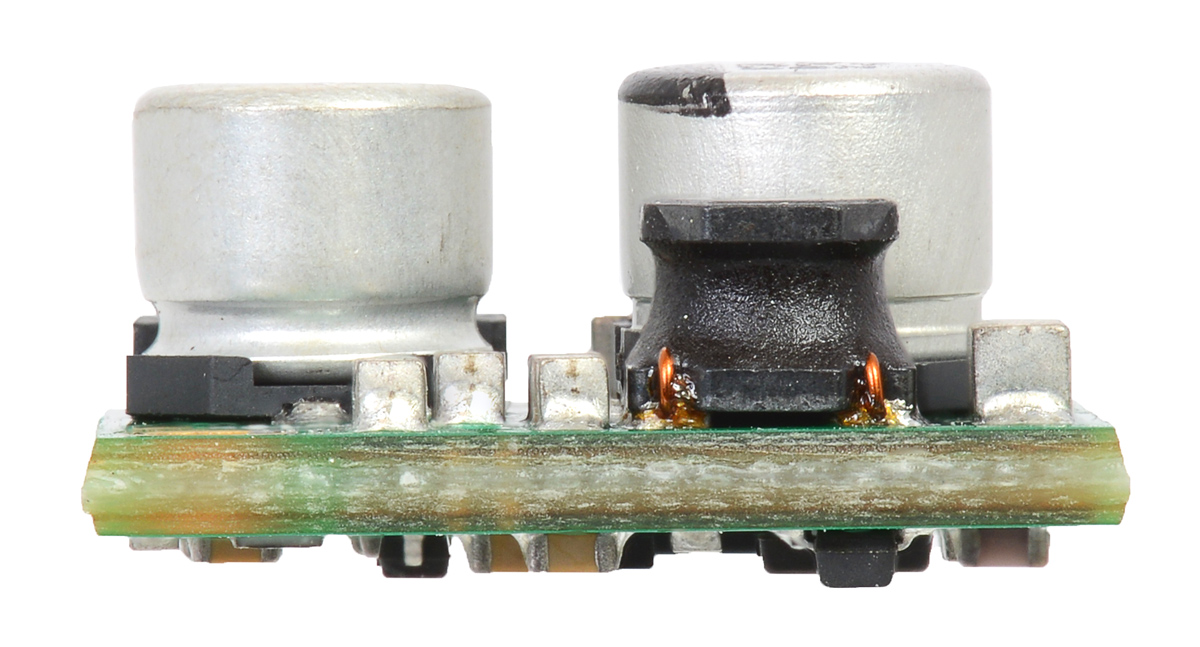 |
Pololu 2.5A Step-Down Voltage Regulator D24V25Fx, side view. |
|---|
Well, if we had been lucky, you might have been reading a less interesting version of this new product announcement three weeks ago. As is typical for these borderline cases, it was the especially hope-dashing kind of failure where a casual test indicated that the board was working, but more in-depth tests revealed stability and performance issues. To make sure the components were not the source of the problem, we put the exact same components onto the PCB of the larger version that already worked. The pictures below show the D24V60F5 regulator (left) populated with its standard components and the D24V60F5 regulator’s PCB populated with the components for the new D24V25F5 (right).
|
|
The new components on the old board worked, so after some final checks that the new prototypes were assembled correctly, we knew it was a layout issue. We wanted assurance that the design could work before just diving into a four-layer revision, so I took some prototypes and added redundant connections to see their impact. The pictures below show some of my test boards with varying numbers of additional ground connections.
|
|
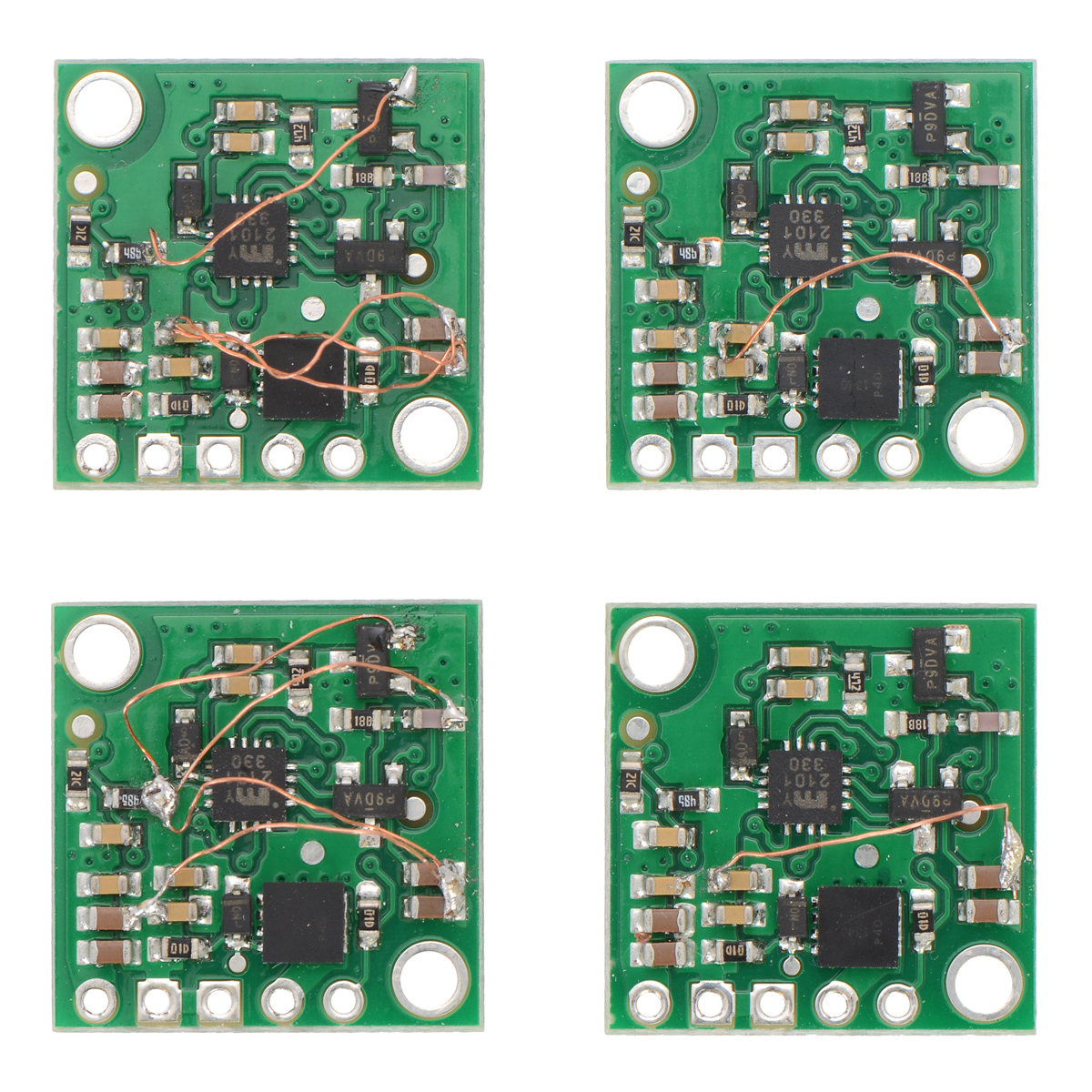

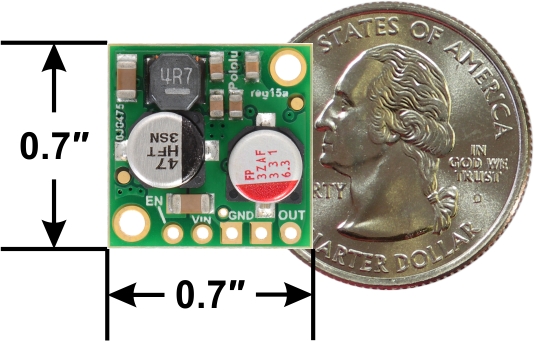 |
I was able to see that the more additional ground connections there were, the more the issues went away. So, I routed the four-layer board, and after a week of tests on over a dozen prototypes, I am happy to announce the release of our most sophisticated regulator yet! The D24V25F5 buck regulator generates 5 V from input voltages of up to 38 V with typical efficiencies of 85% to 95%. The board measures only 0.7″ × 0.7″, but it allows a typical continuous output current of up to 2.5 A.
We are quite happy with how manufacturing of these units is going, so we expect to be moving toward more dense designs like this in future products.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









