Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 19)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Remote-controlled Zumo Robot
 |
Forum user robo_proyect uses an IR sensor for RC control and an ultrasonic sensor for obstacle avoidance on his Zumo robot.
You can see more about robo_proyect’s robot in his forum post.
Katy Perry peppermint dress with Pololu parts
 |
Halloween is just around the corner, and people are looking to make fun costumes. I recently took a couple of calls from customers who were looking to make Katy Perry-inspired costume dresses with spinning peppermints, following the instructions found on this RPF forum thread. Parts from Pololu used to make the dress included an enclosed 3-AA battery holder with a switch and a Solarbotics GM3 224:1 Gear Motor. However, we suggest substituting our 200:1 Plastic Gearmotor, which has similar performance but no back shaft that needs to be removed.
If you have a cool costume that uses our products, please feel free to share them in the “Share your projects” section of our Forum.
Featured link: http://www.therpf.com/f24/katy-perry-peppermint-dress-completed-i-think-189238/
Flipbot: A Wixel-powered RC robot
 |
Geoff from Tabletop Robotics wrote a tutorial on how to build a Flipbot, a basic differential-drive robot that can keep on going even when flipped upside-down. A Wixel serves as the brains of the robot, and a second Wixel in the remote allows the Flipbot to be wirelessly controlled. In addition to the Wixels, the Flipbot uses a number of Pololu products, including:
- Two micro metal gearmotors
- 22T track set
- DRV8833 dual motor driver carrier
- MMA7361L 3-axis accelerometer
The accelerometer is used to determine when the robot is upside-down. Geoff’s tutorial has a full parts list and a diagram of how everything is connected; the complete source code is also available.
PiBot-B: mobile robot with a Raspberry Pi
 |
Thomas Schoch, of Essen, Germany, built a neat robot with a Raspberry Pi and a Zumo Chassis Kit. The PiBot-B is controlled by a custom iPhone app that communicates over WiFi to the Raspberry Pi, which is running lighttpd and PHP. A Python program uses the WiringPi library to send signals to an L293D motor driver that drives the two 100:1 Micro Metal Gearmotors in the Zumo chassis. The iPhone app displays video from the attached Logitech C300 webcam, and the robot has an integrated 8×8 LED matrix from Adafruit that indicates its state. In the future, Thomas plans to add sensors for obstacle detection and make the robot autonomous. We were impressed by several things:
- PiBot-B is very tidy, thanks in part to the USB cables that were shortened and modified using liquid rubber.
- The Raspberry Pi has only one PWM output so Thomas used two OR gates to select whether the left motor, right motor, or both motors receive the PWM signal.
- The write-up has some great photos and informative diagrams.
The PiBot-B page is written in German, but it has a link at the top to translate it into English using Google Translate.
Clusterbot, a beginner robotics project tutorial
 |
Lonnie Honeycutt made a nice tutorial on how to make a simple beginner robot that uses many parts that you can find on our website. The tutorial breaks down the construction of the robot into different parts and includes videos that help demonstrate how to build the robot. It also includes links to some of our products used in the robot, like the TB6612FNG Dual Motor Driver Carrier, Pololu Robot Chassis, and the Tamiya 70097 Twin-Motor Gearbox Kit. Check it out if you are looking for a project to get you started.
Here are links to three parts of the tutorial he has posted so far:
Part 1: Arduino robotics – motor control
Part 2: Arduino robotics – chassis, locomotion and power
Part 3: Arduino robotics – wiring, coding, and a test run
WALL-E controlled by a Maestro
Forum user robo_proyect modified a WALL-E toy with a Micro Maestro 6-Channel USB Servo Controller for his first robotics project. Visit his blog (in Spanish) for more information on this and his other projects.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7435
Zumo Robot with Pololu Plug-in Modules
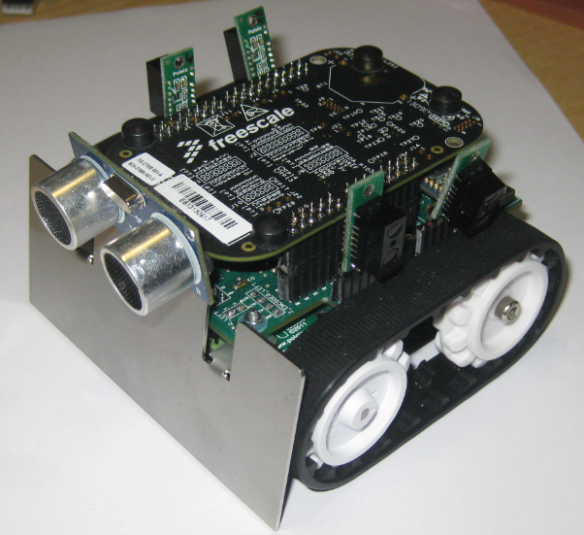 |
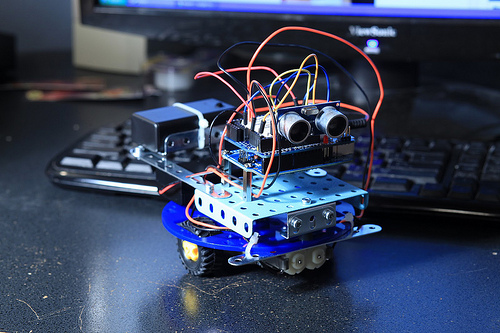
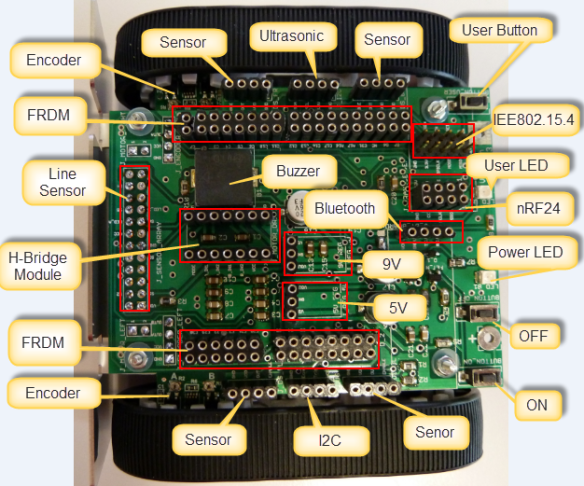
Forum user Erich created a custom Zumo Robot Chassis PCB to use with our Zumo chassis kit. The board is designed to accept a large number of plug-in modules, such as a DRV8835 dual motor driver carrier, encoders, and voltage regulators. Sensors that can be mounted on the robot include a Zumo reflectance sensor array, some distance sensors, and an ultrasonic sensor, and it also supports several wireless communication modules. Instead of an Arduino, it uses a Freescale FRDM-KL25Z as the microcontroller board.
 |
You can follow his robot’s progression by visiting these forum posts:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled.
Speech synthesis with the Orangutan SV-328
Forum user Jim Remington has been working on getting the Talkie speech synthesis library to run on an Orangutan robot controller. The Talkie library, written by Peter Knight for the Arduino, has its roots in a Texas Instruments speech synthesis system that dates from the 1970s and was used in the Speak & Spell educational toy.
When we read about what Jim was doing on the Pololu Forum, we wanted to try it ourselves. We modified Jim’s Orangutan LV-168 code to work on the Orangutan SV-328, and we discovered that the Orangutan’s motor driver could be used as an improvised audio amplifier. This video demonstrates the result:
(Yes, those numbers are a little implausible, but they’re a good way to show off Jim’s number-to-speech routine.)
Our version of Jim’s demo, converted to an Atmel Studio 6 project for the Orangutan SV-328, can be found in this post. To read more about Jim’s work and download his code, see his forum topic.
Related products

Qtechknow wins Educator's Choice award at Maker Faire
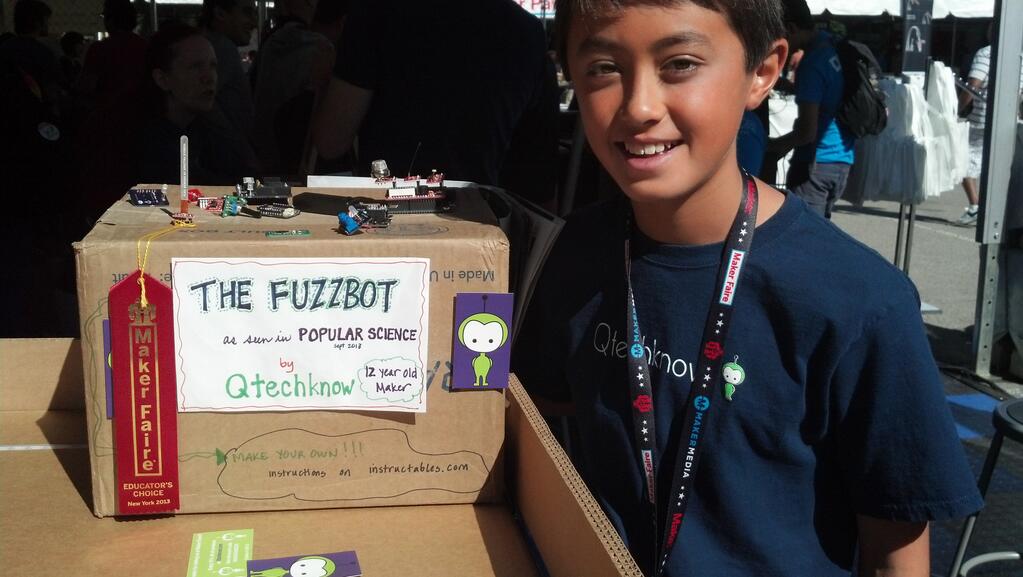 |
We saw a tweet from Atmel that Qtechknow’s Fuzzbot—a robot based on a Zumo that helps clean floors by dragging a dust cloth around while avoiding obstacles—won the New York 2013 World Maker Faire Educator’s Choice award. Qtechknow was recently featured in a Popular Science article.
Related post: Fuzzbot
Mini Maestro 24 controls a parallel LCD
In this video, forum user Dev255 controls a standard (HD44780 parallel interface) 4×20 LCD display with a Mini Maestro 24-Channel USB Servo Controller and displays the value of the potentiometer (converted to a percentage) on the screen. You can find out more about his project and see his Maestro script in his forum post.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7402


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










