Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 15)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Leviathan: an autonomous Raspberry Pi-controlled electric boat
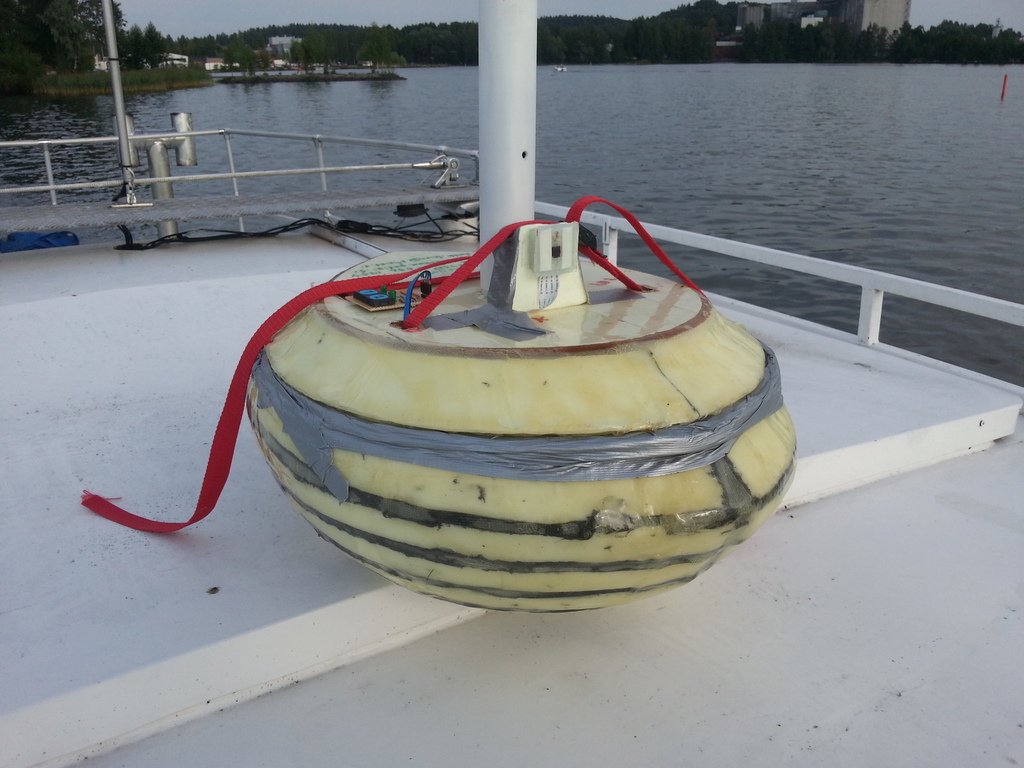 |
Heikki Leivo and Matti Koljonen are currently working together to develop a miniature autonomous electric boat, which they are calling Leviathan. The boat is made of polystyrene foam, uses brushed DC motors and servos for movement, and is controlled by a Raspberry Pi, which reads data from GPS and a MinIMU-9 inertial measurement unit for navigation. Leviathan is equipped with a camera and also features a D24V6ALV step-down regulator for powering servos and other electronics. The boat is also controllable over WiFi.
 |
The electronics inside Leviathan. |
|---|
Matti and Heikki plan for their vehicle to be able to run pre-defined routes, capture photos, and record video, among other things. You can learn more about Leviathan on its website.
Related products



Roboceratops - Robot Dinosaur
Robert Stephenson (blobbington) posted about his robot dinosaur, Roboceratops, on the Trossen Robotics forums. Roboceratops is a small robotic dinosaur built to resemble a member of the Ceratopsian group. It uses a total of 14 servos for movement that are commanded through two of our Mini Maestro 12-Channel Servo Controllers, which are controlled by serial commands from his custom hand held controller. The controller is directly wired to Roboceratops and uses an Arduino Mega 2560, an LCD screen and two 3-axis joysticks. Robert wants to improve his design by making it wirelessly controlled and battery powered, and he plans to eventually make Roboceratops autonomous.
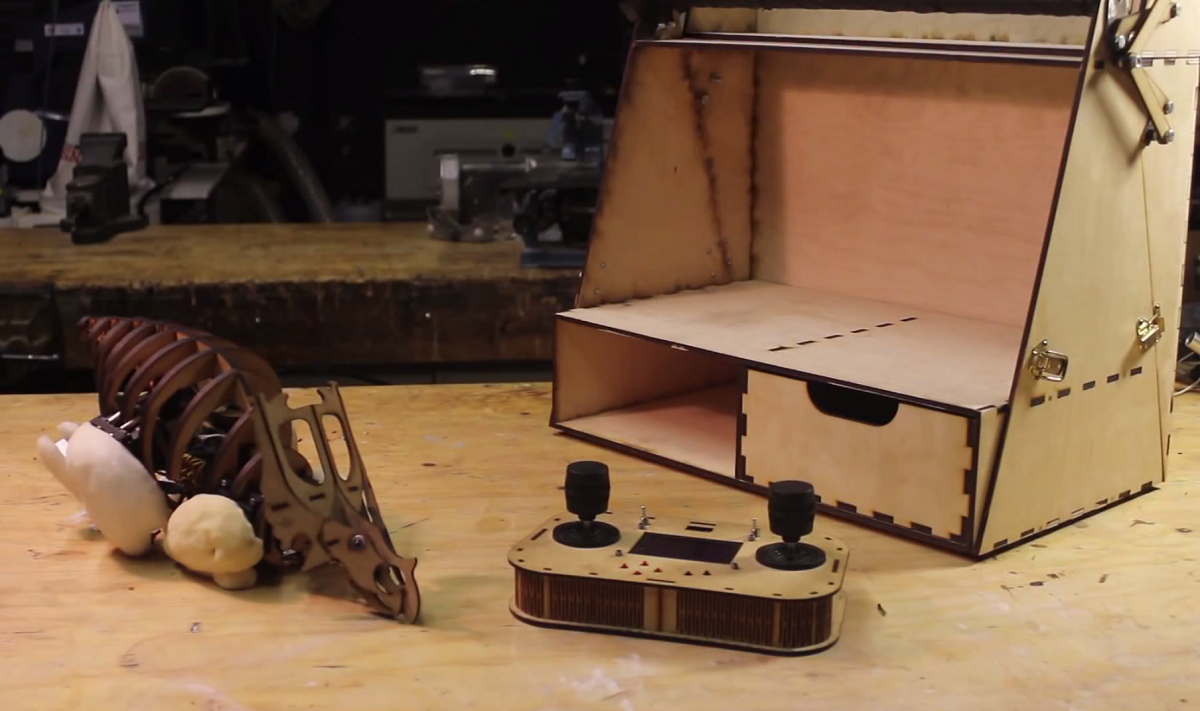 |
Roboceratops is mainly constructed out of laser cut MDF, but the legs are made from aluminum square bar. Upholstery foam was added to the legs to make them look more like real legs. The case of the controller and the neat carrying case at the end of the video also appear to be laser cut.
Related products



Modding the Zumo: encoders, WiFi, GPS, USB, 120 MHz, and joystick control
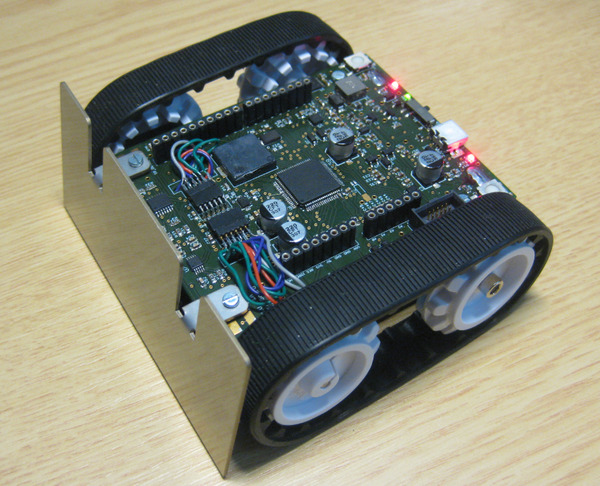 |
Forum user Erich uses our Zumo chassis as a platform for teaching robotics, but instead of using the Zumo shield, he has been making his own custom electronics that let it do many more things. One of his most recent projects, which he describes in this forum post, involves a control board he designed that uses a Freescale ARM Cortex-M4F running at 120 MHz. He says it is capable of running WiFi, USB, GPS, and processing encoder signals in real-time.
His robot also uses a mini-sumo blade, Zumo reflectance sensor array, and a pair of 75:1 micro metal gearmotors with extended shafts connected to a pair of optical encoder boards.
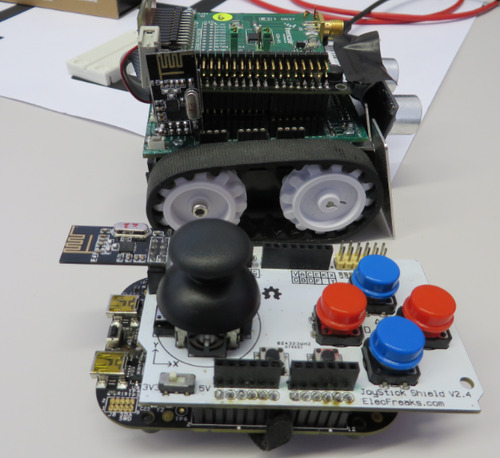 |
Erich also used the ElecFreaks’ joystick shield to run his modified Zumo, which sounds like a lot of fun! For more information on this project, including some of the problems he had to overcome to get it all working, see this forum post or visit Erich’s website.
Erich has posted to our forum about his projects before; you can find a list of the forum posts he made that we blogged about below:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled
December 2013: Zumo Tournament Videos
May 2014: Optical Motor Shaft Encoder in Zumo with Signal Processing
Related products





Firetail UAV System
 |
We mentioned it in passing in an earlier post, but we think that the Firetail UAV System deserves its own post. Since then, Firetail’s creator, Samuel Cowen, has continued to develop this open-source UAV autopilot system, posting regular updates on his blog and sharing his project on the Pololu forum.
Firetail is designed to be installed in any fixed-wing RC airframe and autonomously fly up to 512 waypoints. The system includes software for a ground control station, which allows users to see the location, speed, altitude, and orientation of the aircraft. Users at the station can also upload and download autopilot settings and plan flights using Google Maps.
To test Firetail, he built his own RC aircraft, which uses an Arduino Due to process signals from an RC receiver, and reads data from an AltIMU-10. Depending on how the user sets up the autopilot mode, the Firetail system either flies the craft, or simply allows the user to fly the craft while streaming telemetry data to the ground control station.
You can learn more about the Firetail system on its website.
 |
Related products


TwoPotatoe balancing robot
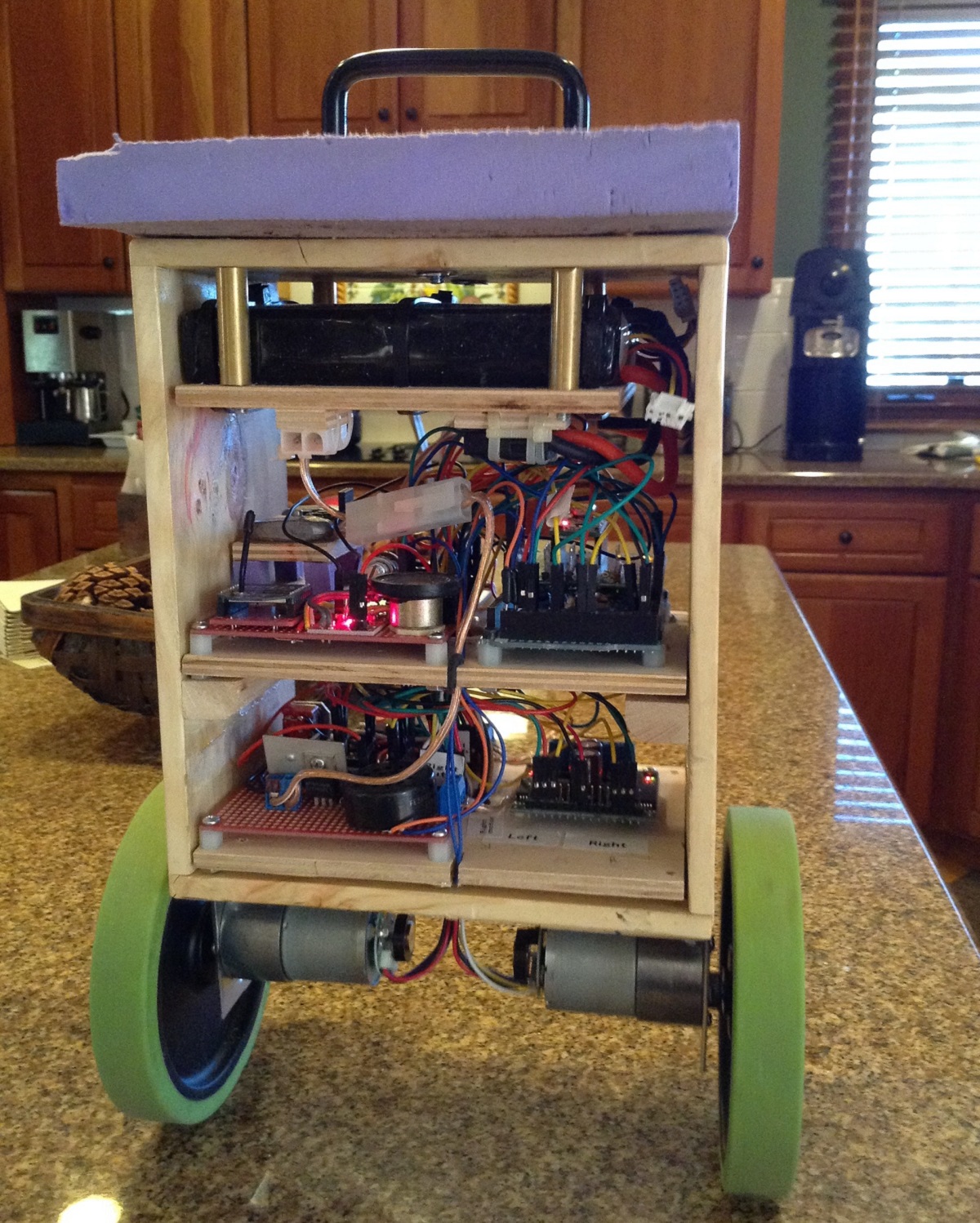 |
TwoPotatoe is a customer-built balancing robot that in its latest form uses an Arduino Mega to receive commands from a custom-made controller via XBees and a Wixel to wirelessly send telemetry to a PC. The robot uses feedback from a MinIMU-9 v3 IMU module’s accelerometer and gyro to maintain its balance, and it uses the MinIMU’s compass to navigate. The drive system consists of two 37D mm metal gearmotors with encoders controlled by a VNH3SP30 motor driver carrier.
You can see videos and read more about how TwoPotatoe works in the how it works section of its site.
10 December 2014 update: The old video of Twopotatoe has been replaced with a newer one. TwoPotatoe has also undergone a few changes: Arduino Due instead of the Arduino Mega, new motor controllers, new personality, etc. For more information about the changes and to see some new pictures, check out TwoPotatoe’s website.
Related products




Apeiros robot Kickstarter
 |
Abe Howell posted to our forum about a Kickstarter campaign for a robot he calls Apeiros. It is an open-source robot he designed as a teaching tool for STEM. Apeiros uses some of our parts and our laser cutting service in its construction. It is also designed to be upgraded with some of our sensors like the QTR-3 or QTR-8 reflectance sensor arrays or the Sharp GP2Y0D810Z0F Digital Distance Sensor. Some of the higher pledge rewards on the Kickstarter include these sensors. You can learn more about the robot on its Kickstarter page.
Related products



Hexapod robot running ROS
One of our customers made a hexapod that is controlled with a PlayStation controller. It uses our 18-channel Mini Maestro to command the servos and a MinIMU-9 v2 for stabilization. The hexapod’s movements are directed by a BeagleBone Black running Robot Operating System (ROS). The physical body of the hexapod is based on a Lynxmotion Phoenix design and was constructed by the customer. The project is well documented and more details can be found in the original post. However, the post is in Russian, so you might need to запустить страницу через переводчика.
Related products


Troubled Child, a full-size autonomous vehicle
The folks from SHARC have converted a Jeep into an autonomous robot for SparkFun’s annual Autonomous Vehicle Competition that took place last weekend. Their robot, Troubled Child, won first place in its class and the “Crowd Favorite” award.
 |
Long-time customer Michael Shimniok (our first blog post — from before we called it a blog — was about a tutorial he wrote for programming AVRs from a Mac) used his 1986 Jeep Grand Wagoneer to explore the back roads of Colorado and Utah before converting it into an autonomous vehicle. The autonomous Jeep uses our D15V35F5S3 switching step-down voltage regulator for powering the on-board electronics, and our dual relay board for running the warning horn and deactivating the pneumatic brake failsafe.
 |
You can check out their final run from inside the vehicle in the video below.
For more information on Troubled Child and the team behind the build, check out their build page or forum post.
Related products


Wi-Fi controlled Zumo Chassis with DRV8835 and GoPro
 |
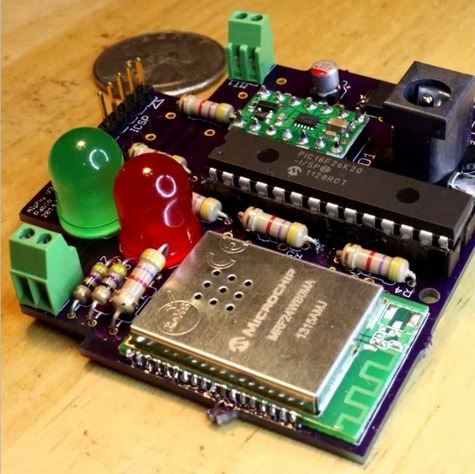
Forum user Pablo shared his Wi-Fi controlled robot with pictures and videos from his Instagram. In Pablo’s forum post, he summarizes his project, which consists of a custom PCB that he designed himself to interface a PIC18F26K20 with a MRF24WB0MA Wi-Fi module. His custom board also carries a DRV8835 motor driver and is mounted on a Zumo Chassis. The robot is controlled through Wi-Fi using a custom Android app and has a GoPro camera mounted on the Zumo blade. Finally, to top it all off, he placed a 6" Domo plush doll on top.
The picture below shows his fully assembled PCB, and Pablo posted a sped up video of its assembly.
 |
For more details, including links to more of Pablo’s Instagram videos of his project like this one, please see Pablo’s original post.
Related products

Geiger counter using A-Star
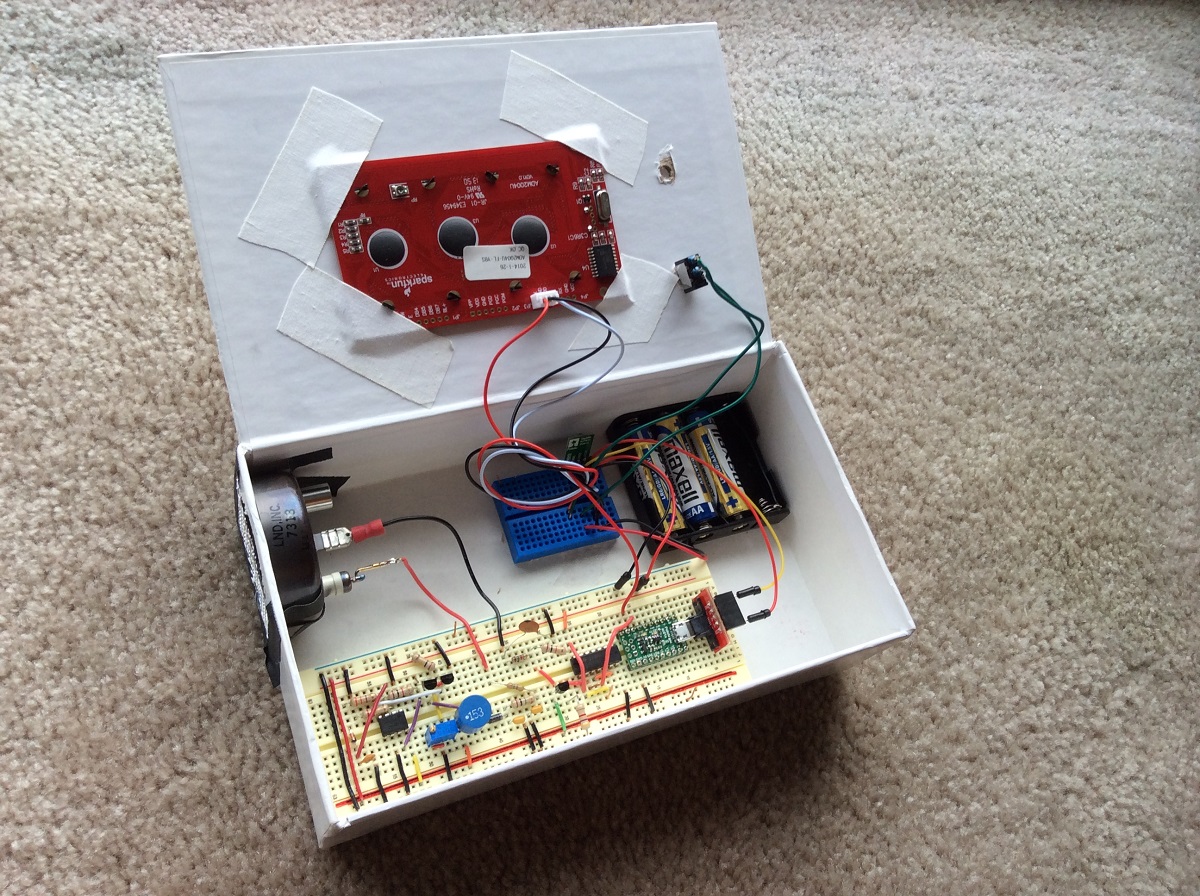 |
The inside of the Geiger counter. |
|---|
The home-made Geiger counter featured in this post by forum user bob_day uses an A-Star 32U4 Micro, LND 7313 Geiger tube, and LCD to measure and display Geiger tube counts. The LCD displays the counts detected during the last minute, the average counts per minute, and the maximum counts in a minute. The project was originally designed for the Arduino Micro, but the program was able to run on the A-Star without any software modifications. The entire project is powered from one S7V8A adjustable step-up/step-down voltage regulator, and the conditioning part of the circuit, which shapes the output into narrow pulses, was designed by bob_day . Schematics and code for the project are included in the forum post.
 |
The case and display of the Geiger counter. |
|---|
Related products





Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









