Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 14)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Candy bowl surprise

Anyone who has gone trick-or-treating has seen the house that puts a bowl of candy on the front porch and knows that there are those greedy trick-or-treaters who take more candy than they are supposed to. Well, if you are that person who puts the bowl of candy out on your front porch, you can make trick-or-treaters think twice before they take more than one piece of candy. In this project, I actuate a severed arm to slap down at the candy bowl whenever someone goes to reach into it. Continued…
Ascending/descending spider
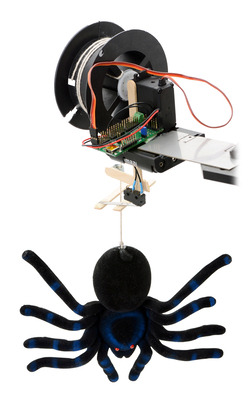
This animated spider prop takes a traditionally static Halloween display to new heights! The setup is simple: a Maestro servo controller and a continuous rotation servo raise and lower a spider with the help of a limit switch. Continued…
Scary shaking tombstone
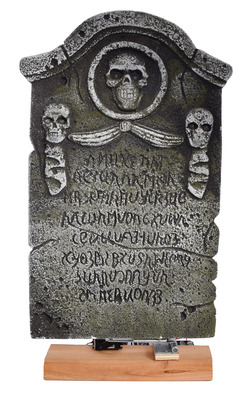
Before we started our Halloween projects, several of the Pololu engineers took a trip to a local Halloween store to get inspired. At the store there was a wall lined with the polystyrene foam tombstones that are meant to be stuck into your front lawn. They immediately made me think of the graveyard outside the haunted mansion at Disneyland, and I knew that I wanted to make one of them shake and scream. For added effect, I also picked one that had a few skulls on it, so I could place red LEDs in the eyes. Below are some of the details that went into making the project so far. Continued…
Inflatable ghost

After doing the creepy mask, I wanted to do something a bit more festive. This Halloween prop was inspired by those inflated decorations people put on their lawns. In this case, I wanted something a bit smaller since I wanted it to fit indoors. I also wanted to use one of our addressable 8mm RGB LEDs, so I could make it light up all sorts of colors instead of just a single color like I had often seen. I decided to make an inflatable ghost because I wasn’t sure I would be able to control the shape that well and figured a ghost would give me more leeway in shape. Continued…
Simple Animatronic Skull
If you have been following our blog, you have seen some fun and scary Halloween projects posted by my coworkers here at Pololu. Well, this is the first part of my prop for my costume for this upcoming Halloween. After watching an animatronic devil baby terrorize New York City, I knew I wanted to build a similar demon baby that would be attached to me with a baby carrier. Continued…
Ghastly gas ghost

This project turns a innocent-looking ghost decoration into an ambush in wait for unsuspecting passersby. The basic idea is straightforward: whenever someone walks within a few feet of the ghost’s face, it blasts them with a terrifying burst of compressed gas. Continued…
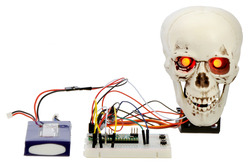
Motion tracking skull Halloween prop

If you read Grant’s Creepy eyes Halloween prop post, then you already know that several of us here at Pololu are working on Halloween projects. I based my project on a motion tracking Halloween prop tutorial by Jason Poel Smith that I saw last year on the Make magazine website. The concept is simple: make a Halloween prop mysteriously follow an unsuspecting person as they walk by. The tutorial by Jason Smith uses photoresistors to track a person by detecting their shadow and moving a servo with a Halloween prop attached to it. This works well, but there are a few things that I thought could be improved. Continued…
Creepy eyes Halloween prop

In the lead up to Halloween, I thought it would be fun to make some Halloween-themed props; in particular, I was interested in making something creepy. What first came to my mind was one of those creepy portraits with moving eyes. To change it up a little, I decided to use a mask instead of a picture (which I thought would make it easier to hide the electronics). Down at a local store called Halloween City I picked up a cheap mask and some plastic eyeballs (though a more crafty person might just make their own mask and eyeballs). I made sure the mask was a bit stiff because I needed it to hold shape without actually having someone’s face in it. For the electronics in the project, I grabbed two sub-micro servos, a Micro Maestro, and a 4.8V battery pack. If you don’t have jumper wires it might also be helpful to get a pack of those, but this build only uses one to jump battery power to the Maestro’s logic power. Continued…
Community project: 2pi, a simple line following robot
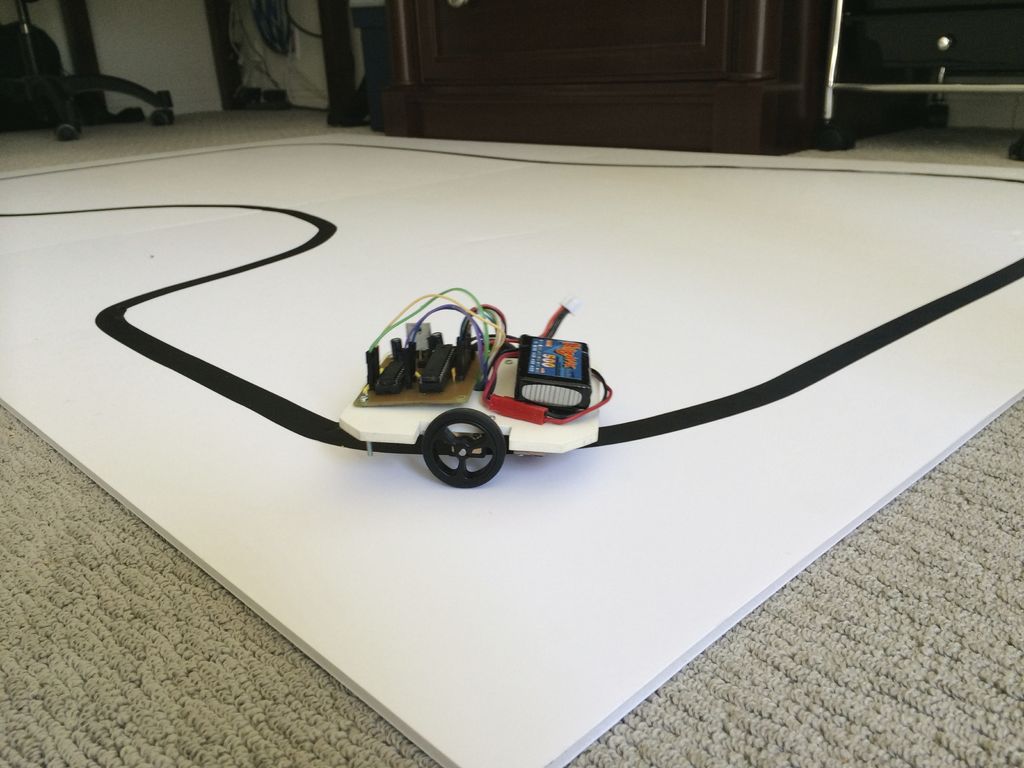 |
The 2pi, built by Mark Moran, is a line following robot based on our 3pi robot. The 2pi uses our 100:1 micro metal gearmotors, motor brackets, 32mm wheels, 1/2″ ball caster, QTR-8RC reflectance sensor array, and U3V12F9 switching step-up voltage regulator. All those components are mounted to a chassis that was cut from PVC foam.
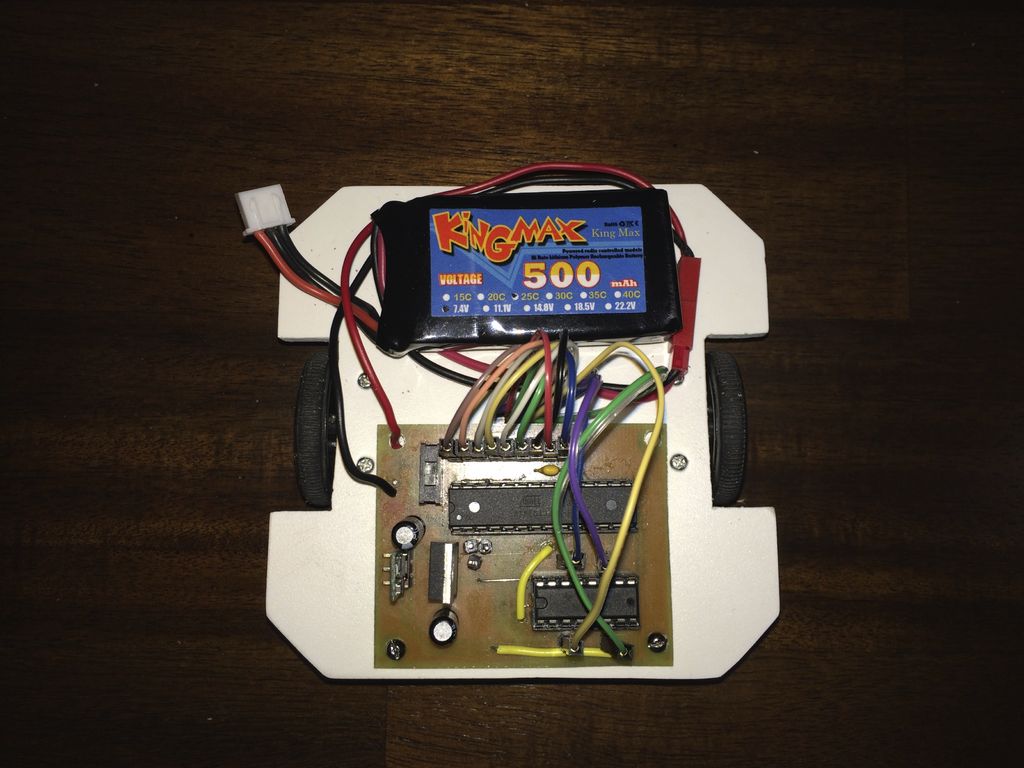 |
The robot uses a custom made PCB with an ATmega328 as the brain (the same AVR chip used in the Arduino Uno, some of our Orangutan Robot Controllers, and, of course, the 3pi). You can see the 2pi following a line in the video below.
For more information about how Mark built his robot, check out his Instructables guide.
Related products






RoboNUC: Netduino and LIDAR robot
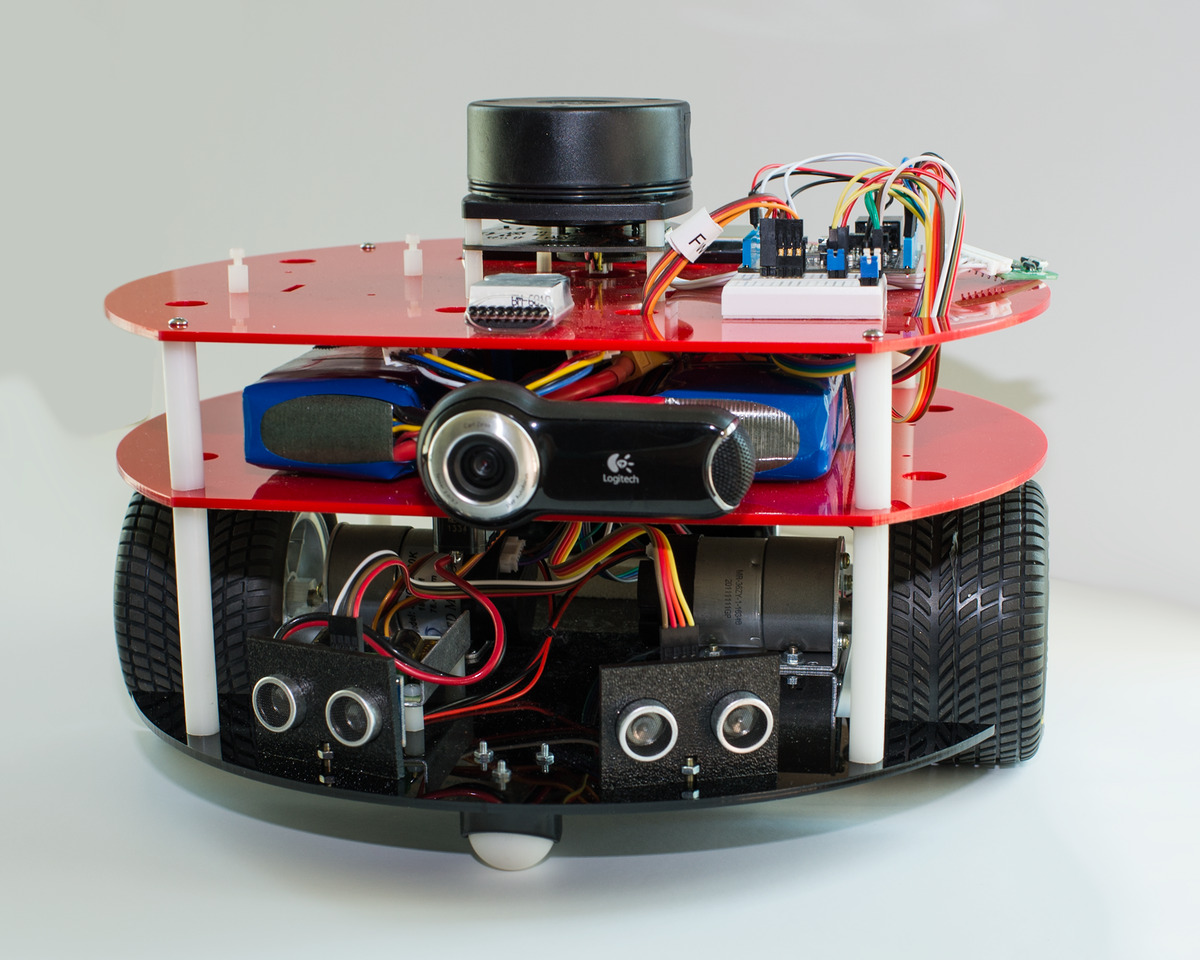 |
Pololu forum member spiked3 recently shared a sophisticated robot he made called RoboNUC. It uses a Netduino and a LIDAR module and was intended to help him learn simultaneous localization and mapping (SLAM). SLAM is a technique used to map an unknown environment and keep track of the device’s location within the environment. Using SLAM, the robot is able to characterize the surrounding areas without needing to physically navigate them. RoboNUC uses our 1″ plastic ball caster, and the acrylic chassis was laser cut using our custom laser cutting service.
For more information about this robot, including a parts list, please see the RoboNUC Recap blog post at Spiked3.com.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










