Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 18)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
David and Fang's dead reckoning robot based on the mbed LPC1768
Several people here at Pololu made robots to compete in the LVBots dead reckoning competition last week. This post is about the robot I made along with another engineer here.
Dead reckoning is the process of continuously calculating your position using internal sensors that tell you something about what speed and direction you are going. In our dead reckoning competitions, robots demonstrate that they are capable of dead reckoning by following a long, twisting line drawn on the floor and then driving back to their starting point. The line functions as a user interface that directs the robots through a sequence of moves for which it was not preprogrammed. The robots are scored based on the time they took and how close they were to the starting point at the end. Continued…
Dead reckoning and wall following with a Zumo
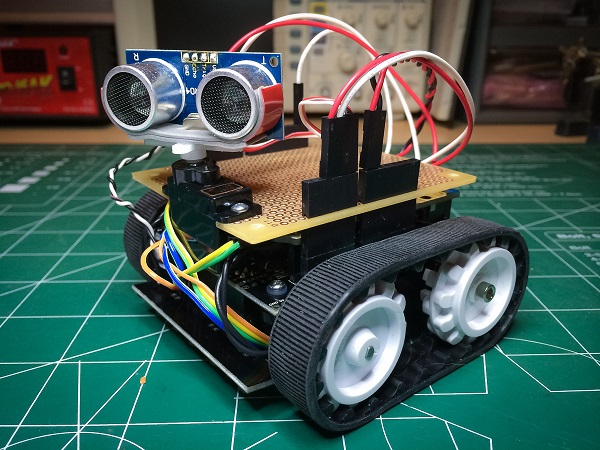 |
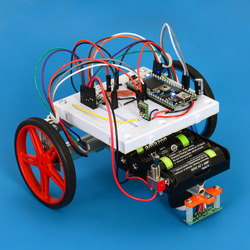
Forum user solderspot recently posted on our forum about some modifications he’s been making to his Zumo robot. First, he added our optical encoders for micro metal gearmotors to his robot, which required using motors with extended back shafts and cutting holes in the chassis to route the wires from the encoders.
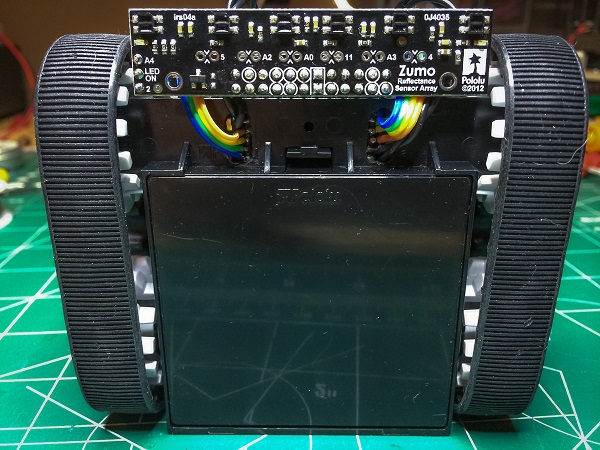 |
This allows his Zumo to navigate by dead reckoning, using just the information from the encoders.
He also mounted a sonar sensor on a servo to his robot, which enables it to find its way around a room by following the walls.
A series of articles on solderspot’s blog, starting with this one, covers his experience building and programming his robot. It looks like solderspot has further plans for the Zumo, including more sophisticated autonomous navigation, so watch his blog if you want to keep up with the latest developments.
Related products



Hope's Edge LED Banner
 |
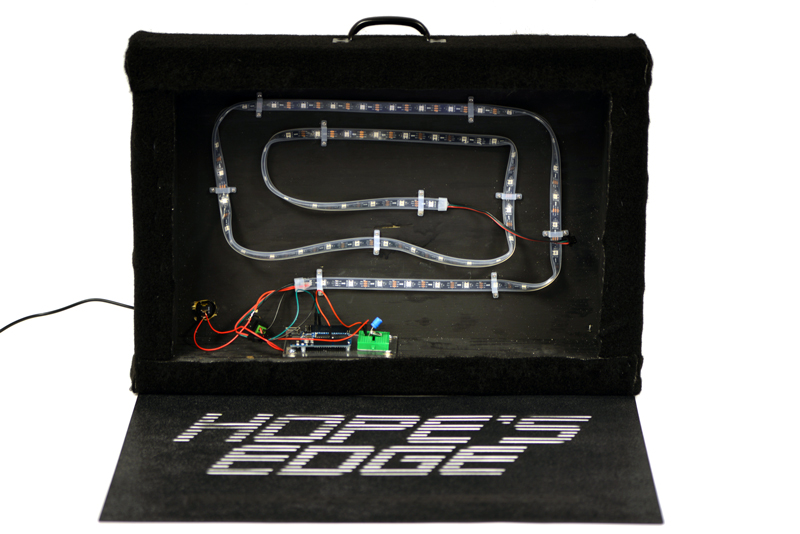
Local indie artist and Pololu employee Tracey, intent on reviving her programming skills and exploring her budding interest in electronics, shed some light on her creative personality by making an LED banner for her band, Hope’s Edge. The banner is a briefcase-sized container that uses an addressable LED strip to shine through a stencil of the band’s logo in a wave of brilliantly changing colors. The stencil and the rest of the panels in the container are made from 1/16" black ABS, all of which were cut with our custom laser cutting service, and a sheet of gift-wrap tissue paper is taped to the inside of the front panel to act as a diffuser. The banner runs off of a 5V wall wart, which is boosted to 9V to power an Arduino Uno that runs Ben’s Christmas light LED code.
|
|



Adapter for universal mounting hubs to VEX wheels
 |
Forum user Hardsuit posted in this thread about the hub adapters he 3D printed for his robot, which is a roughly 1/4 scale RC Tachikoma from the Ghost in the Shell: Stand Alone Complex anime series. The adapters allow some of our universal mounting hubs to be used with VEX 4″ Mecanum wheels. You can find and download his STL file on Thingiverse.
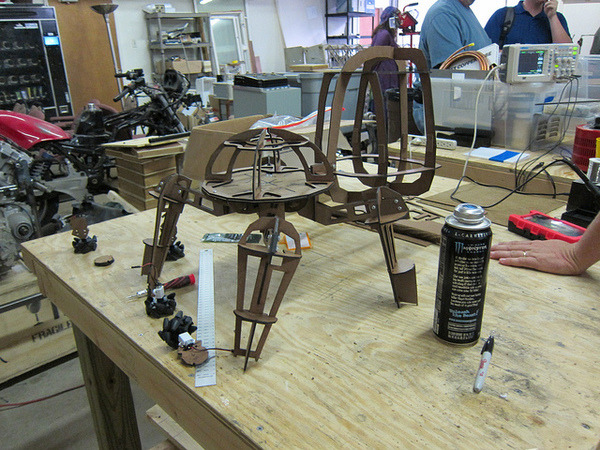 |
The previous version of forum user Hardsuit’s Tachikoma. |
|---|
The Tachikoma, which he has named Sapporo, also uses our Simple Motor Controller 18v15 and 29:1 Metal Gearmotor 37Dx52L mm. Some of the engineers here are GITS fans, and we are definitely looking forward to seeing it completed!
Related products


Raspberry Zumo Robot
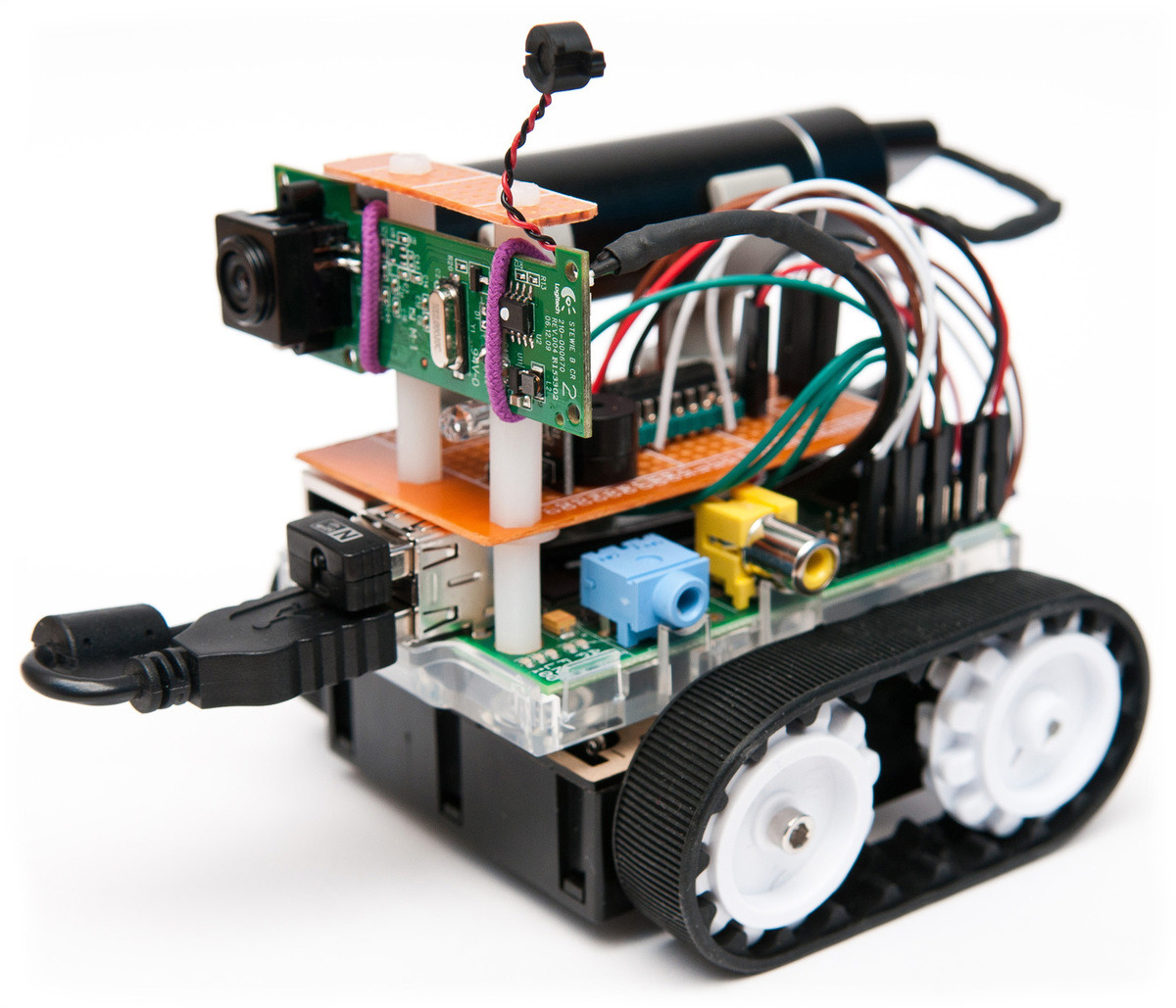 |
Frédéric Jelmoni built a neat robot with a Raspberry Pi and a Zumo Chassis Kit. The Raspberry Zumo robot can be controlled over WiFi using telnet. The server on the Raspberry Pi is written in Python and uses the RPIO library to send signals to an SN754410 motor driver that drives the two 100:1 Micro Metal Gearmotors HP in the Zumo chassis. The server also controls an RGB LED and a buzzer. A stripped-down Logitech webcam attached to the front of the robot provides video that is streamed over the web using mjpg-streamer.
For more details, see the Raspberry Zumo page, which is written in French. Also, see our post from last October about a similar robot, the Pibot-B.
Related products




Mini Sumo Tournament (with Zumos!)
 |
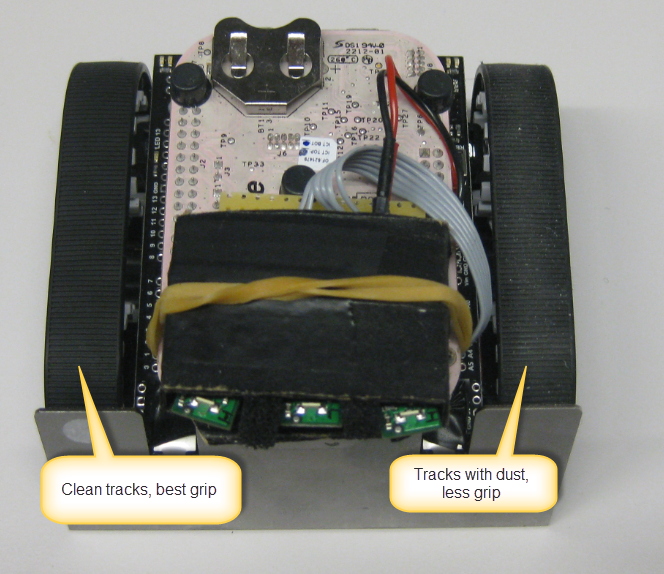
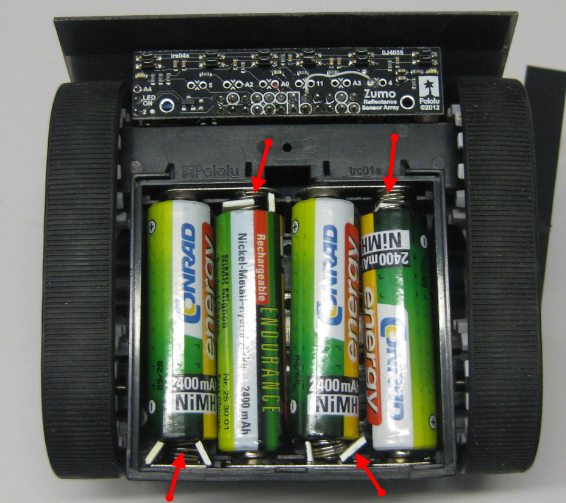
Erich, a professor at the Lucerne University of Applied Sciences and Arts in Switzerland, posted to our forum about their first Mini Sumo tournament, which took place this past weekend. The tournament was a part of Erich’s embedded systems programming class, for which he created a custom Mini Sumo robot platform for his students to modify. His robots use a custom PCB that mounts to the Zumo chassis kit and connects to the reflectance sensor array. Instead of an Arduino, his PCB uses a Freescale FRDM-KL25Z as the microcontroller board. Students customized the modified Zumos with their own sensors (we saw at least a few of them using our IR proximity sensors). 21 robots were entered into the competition, and a winner was determined over 5 rounds. Links to a competitor showcase video, several battle videos, and more information about the competition can be found in his forum post.
We are also excited to see a list of performance tweaks that Erich created for Zumo robots to be more competitive in Mini Sumo. We have made this available as a resource on the Zumo product pages.
|
|
While he was experimenting with our Zumo chassis, Erich posted to our forums a few times updating us on the progress of his modifications. You can follow his robot’s progression by visiting these forum posts:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled
Related products


Ping-pong ball collecting robot makes appearance at RubyConf
We saw this robotic ping-pong ball collector by Will Jessop on the Raspberry Pi blog a few days ago. The robot uses the Pololu 30T Track Set, a Raspberry Pi, and a lot of custom electrical and 3d-printed mechanical parts.
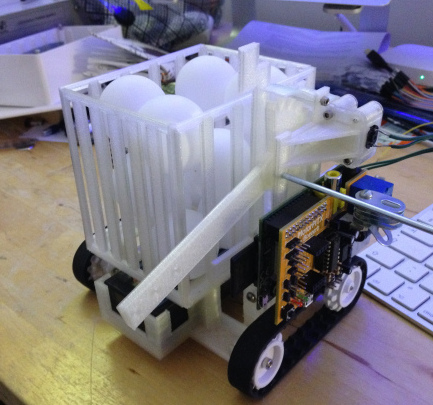 |
Apparently, Will plans to put his robot into service at the office of his employer, 37signals. This is exciting for us at Pololu because 37signals is the originator and a major sponsor of the Ruby on Rails web framework, on which our website is built. And although we did not attend this year’s RubyConf, we are proud that some of our parts, as shown in the video above, made an appearance.
You can find detailed build information in Will’s ping-pong robot blog posts.
Related products

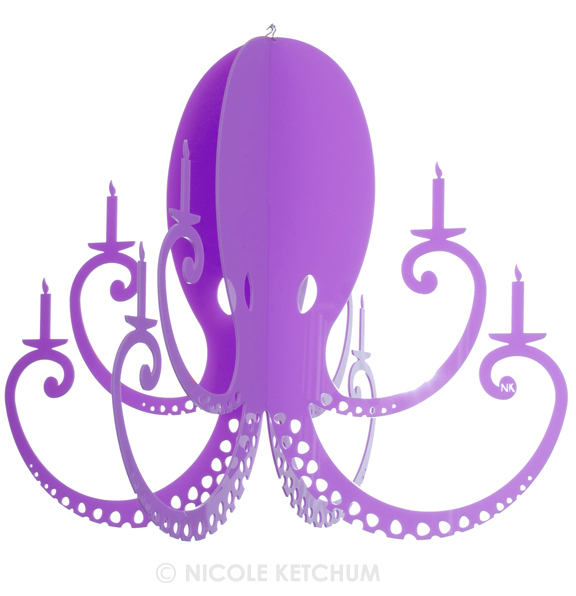
Laser-cut chandeliers by Nicole Ketchum
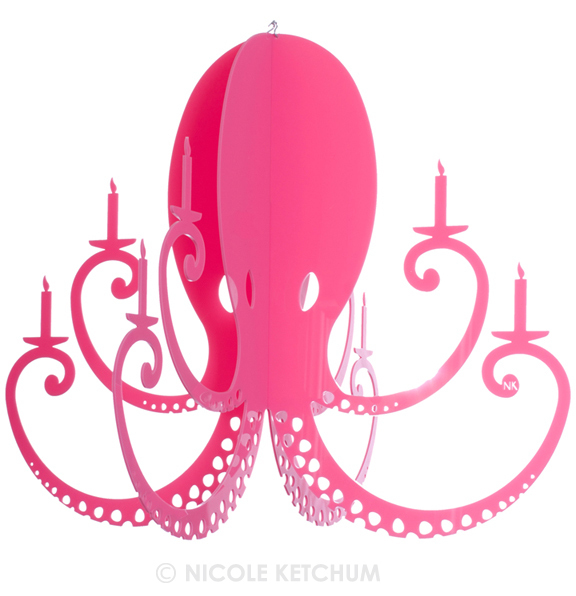 |
While our laser cutting machines can only cut two dimensional parts, there are easy ways to make three-dimensional designs out of flat, laser-cut parts. A simple way to achieve this is to create slots in the vector design to allow the two parts to slide together perpendicular to one another. Some may remember this technique from childhood arts and crafts; this easy tweak allows parts to be easily assembled and disassembled.
These Chandeliers by Nicole Ketchum were created using our 3 mm acrylic with a slot width of 1/8″. You can adjust the width of the slot depending on how snug you’d like them to fit. Since Nicole’s chandeliers are meant to be hung out of reach, a really snug fit wasn’t needed. With the holidays right around the corner, these could spruce up any room of your home!
For more details on using slots to fit acrylic parts together, be sure to check out Nicole’s project in our Custom Laser Cutting Gallery. More details about our custom laser cutting service can be found here.
|
|


Related products
Not your average alarm clock!
Leonid Karchevsky, of Xronos Clock, used our Custom Laser Cutting Service to create an enclosure for his Arduino Based Talking Alarm Clock, the Xronos Clock. The Xronos Clock is open-source, hackable, customizable, and is available in both assembled and kit form.
|
|
|



Related products
Wireless Servo Widget
 |
Pololu forum user Martan recently released a project called Wireless Servo Widget. The project website says:
Wireless Servo Widgets allow you to control up to 64 slaves, with each slave controlling up to six R/C type servos. In addition, each slave can return 3 analog input values to your Raspberry Pi. Slaves have a range of about 50 feet from the master. Use them for home automation, robotics, model train controls, or whatever you want!
The Wireless Servo Widget is based on our Wixel Programmable USB Wireless Module. Martan wrote apps for the Wixel that use the packet addressing feature of the CC2511F32 chip to implement a round-robin protocol. He also made a Slave Widget Breakout Board which makes it easy to plug servos into the slave Wixels. All of this and more can be found on the Wireless Servo Widget website.
 |
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










