Pololu Blog »
Mini Sumo Tournament (with Zumos!)
 |
Erich, a professor at the Lucerne University of Applied Sciences and Arts in Switzerland, posted to our forum about their first Mini Sumo tournament, which took place this past weekend. The tournament was a part of Erich’s embedded systems programming class, for which he created a custom Mini Sumo robot platform for his students to modify. His robots use a custom PCB that mounts to the Zumo chassis kit and connects to the reflectance sensor array. Instead of an Arduino, his PCB uses a Freescale FRDM-KL25Z as the microcontroller board. Students customized the modified Zumos with their own sensors (we saw at least a few of them using our IR proximity sensors). 21 robots were entered into the competition, and a winner was determined over 5 rounds. Links to a competitor showcase video, several battle videos, and more information about the competition can be found in his forum post.
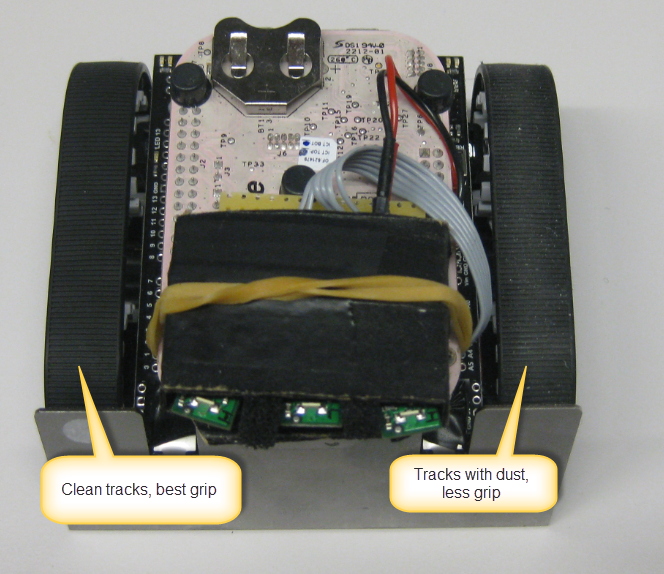
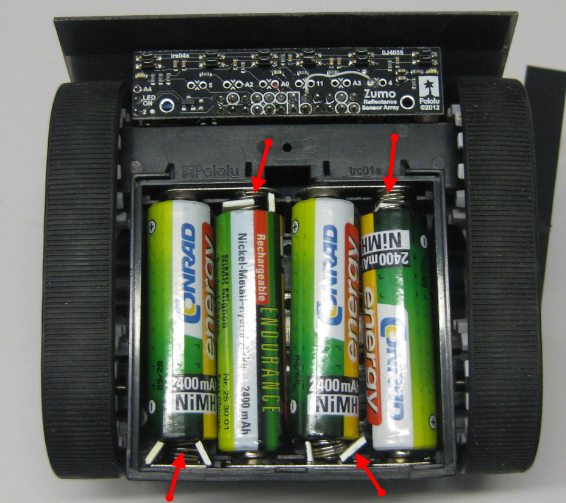
We are also excited to see a list of performance tweaks that Erich created for Zumo robots to be more competitive in Mini Sumo. We have made this available as a resource on the Zumo product pages.
|
|
While he was experimenting with our Zumo chassis, Erich posted to our forums a few times updating us on the progress of his modifications. You can follow his robot’s progression by visiting these forum posts:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled
Related products



-

Ping-pong ball collecting robot makes appearance at RubyConf
- 13 December 2013We saw this robotic ping-pong ball collector by Will Jessop on the Raspberry Pi blog a few days ago. The robot uses the Pololu 30T Track Set, a...
-

New product: I²C Long Distance Differential Extender
- 19 December 2013We’re now selling an I²C long distance differential extender from SJTbits. When you connect one of these boards to each I²C device in your system,...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
