Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 32)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
One-Million-Color Flashlight
Two ShiftBrites controlled by Mini Maestros power a flashlight capable of displaying one million colors with many interesting modes of operation. For more details, see Reed Kimble’s forum post: My Absurd Project – The One-Million-Color Flashlight!.
Related products


Baby Orangutan Hand-Held Tic-Tac-Toe
This hand-held Tic-Tac-Toe game is powered by a Pololu adjustable boost regulator and controlled with a Pololu Baby Orangutan B-328.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=2782
Baby Orangutan Useless Machine
This video shows a “Useless Machine” controlled by a Baby Orangutan. It counts how many times the button is pressed, and then the arm comes out and presses the button the same number of times. The author has also posted source code for the project.
Related products

Otimização Do Algoritmo De Maze Solver Para O Robô Pololu 3pi
 |
Customer Ana Paula Almeida wrote this Portuguese-language paper about the 3pi Robot (1MB doc) as part of a Master’s program in Computational Modeling and Industrial Technology. The paper describes the 3pi in general and specifically how to write optimized maze-solving code.
Related products

Estrella Intersects the Plane
 |
This art installation by Matthew Richard uses 10 OctoBrite DEFILIPPI modules, 80 RGB LEDs, 40 servos, 7 servo controllers, and an Arduino.
Featured link: http://cargocollective.com/mrichard/Estrella-Intersects-the-Plane
Jrk 12v12 TV Lift
This news report from the Philippines shows a custom TV lift using a Pololu Jrk 12v12 made by “gadget kid” Francisco Estrada III.
mbed.org m3pi cookbook
 |
This mbed.org cookbook page will help you get started using your m3pi robot with an mbed development board as your high-level robot controller.
Featured link: http://mbed.org/cookbook/m3pi
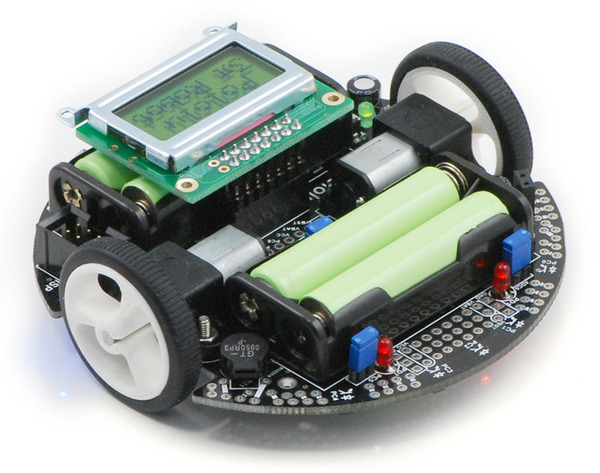
3pi PCB skeleton
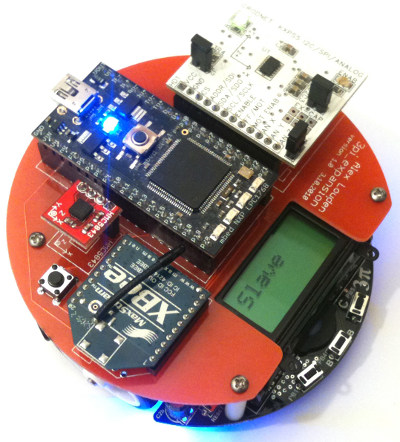 |
Alex Louden has released an open-source template for custom 3pi expansion boards for use with the Eagle PCB design software. The picture shows an example expansion with an mbed microcontroller, Xbee, and accelerometers.
Featured link: http://alexlouden.com/2010/3pi-pcb-skeleton/
Interfacing a FrSky telemetry receiver with a Baby Orangutan.
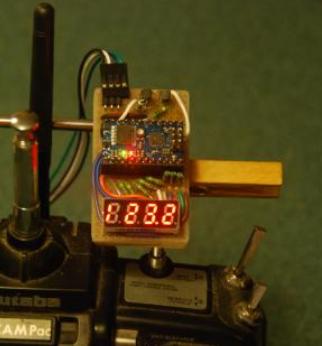 |
Forum user erik46 wrote up a document (523k pdf) showing how to read FrSky telemetry data and display it with a Baby Orangutan. The whole setup is small and light enough to clip on to an RC transmitter. For more information, see his forum post.
iPhone-controlled 3pi Robot.
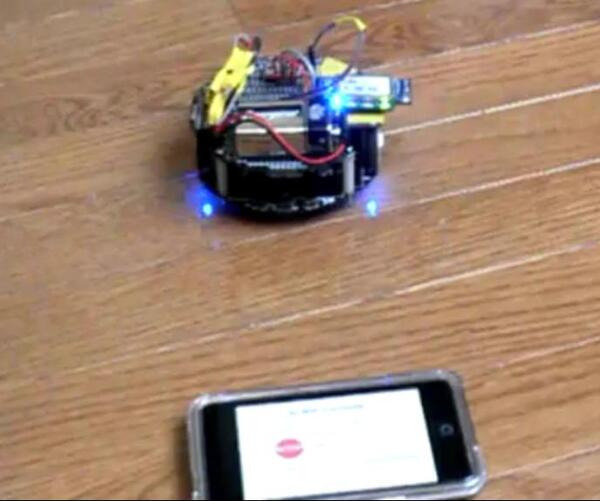 |
In this project, a WiFi module is connected to a 3pi robot, allowing it to be controlled by an iPhone. Here is a video of the robot in action:
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=2816


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation








