Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 30)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Pololu Micro Serial Servo Controller Netduino driver
This Netduino driver by customer Stefan Thoolen supports both the MiniSSC2 and the Pololu protocol for controlling a Pololu Micro Serial Servo Controller.
Related products

"Mr. Twitchy" project featuring Wixels
 |
Mr. Twitchy is a project that uses two Wixels to wirelessly control an electrical stimulation device. The project was featured in Sparkfun New Product post.
Related products

"Blackbeard's Chest" animatronic display
Blackbeard’s Chest by SkullTroniX uses two jrk motor controllers with feedback to control linear actuators as part of a spooky animatronic display.
Low-cost hexapod
A Mini Maestro 24-channel USB servo controller controls three servos in each of this insectoid robot’s six legs. For more information, see this thread on the Trossen Robotics forums.
Related products

Rotating monitor for arcade cabinet
 |
This rotating monitor for an arcade cabinet uses a Simple Motor Controller, a gearmotor with encoders and a Pololu wheel to control the rotation.
DIY telescope remote project
 |
Scopefocus is a well-documented project for building a telescope remote based on the Micro Maestro 6-Channel USB servo controller.
Featured link: http://www.scopefocus.info/
Related products

Instructable: Introducing the Wixel USB Wireless Module
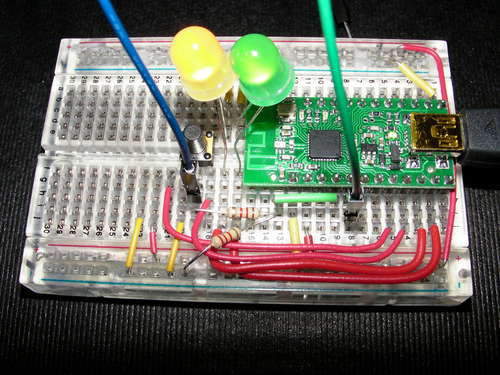 |
This Instructable by customer Michael Oz introduces the reader to the Wixel through a series of basic projects.
Related products
Learning PID values using simulated annealing
This is a video of a robot based on the Pololu 5" robot chassis that automatically improves its PID constants over time.
Featured link: http://www.youtube.com/watch?v=TdquX0lPlYY
Motion simulator chairs
Jrk 12v12s are used as part of two-degree-of-freedom motion-simulator chairs (sim chairs) in this project posted to the XSimulator forums. Here is a video of some initial testing using the Jrk Configuration Utilty:
For more details see the forum post.
Related products

Homemade Segway-like personal transport
Our High-Power Motor Drivers are used to drive the motors in this homemade Segway-like personal transport by Hans Michael Steiner.
Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










