Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 13)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Maestro-controlled Spider Dress 2.0 at CES 2015
 |
This week at the Consumer Electronics Show, some of our engineers got to see Spider Dress 2.0, which was being exhibited by its designer, Anouk Wipprecht, at the Intel booth. The dress is designed to react to invasions of the wearer’s personal space with threatening insect-like legs controlled by servos. Two Maxbotix proximity sensors are used to detect movement, and two 12-channel Maestro servo controllers (one under each shoulder pad) control the response of the legs. The whole dress is controlled by an Intel Edison.
|
|


Anouk explains the dress in detail in this video, which was produced by Make, and features a brief cameo by yours truly:
You can learn more about Spider Dress 2.0 in this Make article, and about Anouk and her work by visiting her website.
Related products

Sparky the assistive companion robot
Forum member jr1985 posted about Sparky, a robot that uses a Micro Maestro and custom Visual Basic software running on a laptop. The goal is for sparky to one day become an assistive companion robot that entertains and helps elderly or disabled people. Currently, Sparky is able to avoid obstacles and navigate through rooms while logging movements to map the areas it encounters. And it has some dancing skills:
For all the Sparky videos, take a look at jr1985’s YouTube channel.
Related products

Darth Vader Santa Claus Sumo Bot
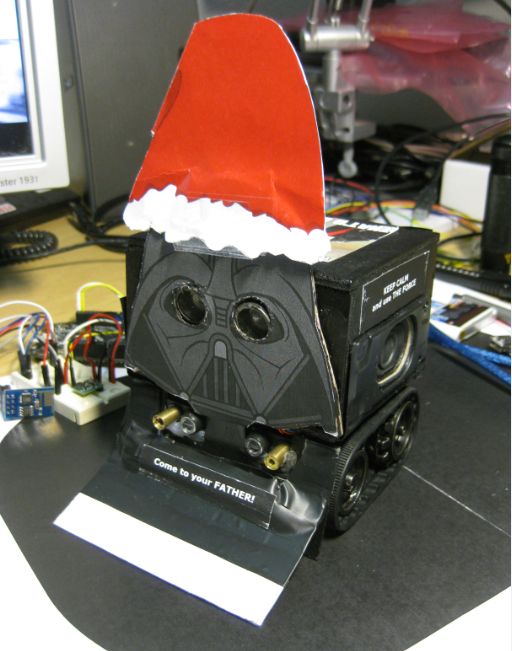 |
Happy Holidays everyone! I thought it would be fun to share this sumo bot that features Darth Vader/Santa Claus and uses our Zumo chassis.
The sumo bot was made by forum user Erich, and you can read more the sumo bot in this forum post and on this blog post from his website.
Erich has also posted to our forum about his projects before; you can find a list of the forum posts he made that we blogged about below:
March 2013: Zumo Robot with FRDM-KL25Z Board
September 2013: Zumo Robot with Pololu Plug-in Modules
October 2013: Zumo Robot with Pololu Plug-in Modules, assembled
December 2013: Zumo Tournament Videos
May 2014: Optical Motor Shaft Encoder in Zumo with Signal Processing
July 2014: Modding the Zumo: Encoders, WiFi, GPS, USB and 120 MHz
Related products

Robotic arm using Mini Maestro at the Nashville Mini Maker Faire
Inspired by this robotic arm tutorial, Andrew Hoover recently posted on our forum about a robotic arm he made for the Nashville Mini Maker Faire. The arm is constructed from laser-cut acrylic and actuated by hobby RC servos. The servos are controlled by a 12-Channel Mini Maestro, which reads the signals from joysticks and converts them to target positions using a Maestro script. You can see the arm in action in this video:
For more information on the project, you can check out Andy’s blog post for his robotic arm project, which includes a parts list, instructions, and code.
Related products

Automated ball path contraption for the holiday season
Bruno Schneider posted the above video on our forum that showcases an automated ball path machine he made for last year’s advent season with his brother and father. The contraption uses a 24-channel Mini Maestro and is displayed in the window of his mother’s sewing shop. The machine is fun and impressive by itself, but the video (with accompanying sound effects) makes the project even more entertaining.
If you make or have made any festive projects using the Maestro or any of our other products, we would love to see them! You can post them in the comments below or in the Share Your Projects section of our forum, which is also a great place to browse for inspiration or ideas for a new project.
Related products


Khan Academy interactive continuous rotation servo demo
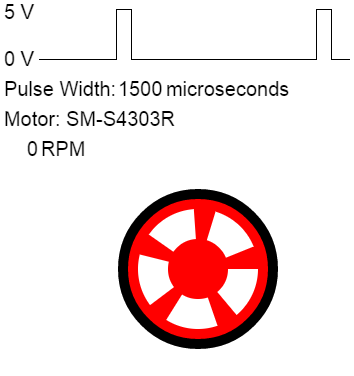 |
Khan Academy user mbbackus created a demo that allows users to visualize the effects of sending different pulse widths to the SM-S4303R and Parallax continuous rotation servos. (You can use the up and down arrow keys to change the pulse width, and more instructions can be found as comments in the code.)
For those who are interested, you can learn more about standard RC servo pulses in this series of blog posts about hobby servos.
You can see the demo on its Khan Academy page.
Related products


ToyCollect: A robot that collects toys from hard-to-reach places
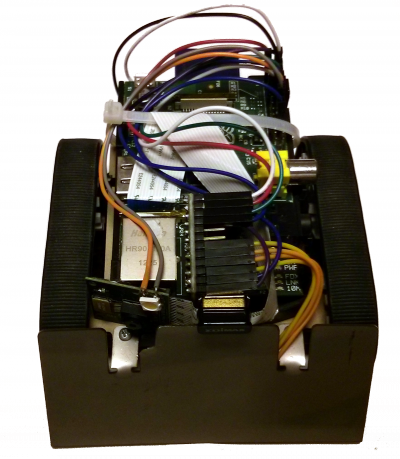 |
The people at Seewald Solutions posted about their Raspberry Pi-based robot they call ToyCollect. Inspired by the creator’s daughter, who hides her toys under the couch, the robot is controlled via Android and can be driven under the couch to allow the user to view the hidden toys via a Raspberry Pi camera module and retrieve them. Along with a Raspberry Pi, the ToyCollect robot uses a Zumo Chassis Kit, 100:1 Micro Metal Gearmotors HP, Qik 2sv1 Dual Serial Motor Controller, and a Zumo blade to push the toys. The video below shows the robot in action (in German; subtitles available):
For more information, including the source code and instructions for building your own ToyCollect robot, see the ToyCollect post on the Seewald Solutions website.
Related products



Raspberry Pi-controlled chicken coop
 |
Forum user bennard posted about his WiFi-enabled chicken coop, which uses a Raspberry Pi to monitor and log data about its environment, serve a web page, send emails, and open and close the coop door. The system has sensors for detecting temperature, humidity, motion, and light, and includes a 50W solar panel and solar charge controller for recharging its batteries. The automated door is a hinged piece of wood that is connected to a linear actuator (via this mounting bracket) and controlled by a jrk 21v3 motor controller.
You can learn more about bennard’s project in his forum post.
Related products




Simple Animatronic Skull, Part 2

As promised in my previous animatronic skull post, this is the update where I integrate the skull with a baby doll. I would like to introduce you to Daisy Spooks. Continued…
Severed fingers Halloween prop

At Halloween parties, it is common to see a punch bowl with one or more eyeballs floating in it and stomach-churning decorations like severed fingers or gelatin worms lining the festive dishes. However, the problem with most of these is that they are motionless and bland. Inspired by Thing, the disembodied hand from The Addams Family, I decided to make a creepy animatronic hand to add some thrill to an otherwise boring table display. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










