Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 9)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Pololu relay module used in custom ESP8266-based plant watering system
Forum user LuisLabMO posted about his WiFi-controlled plant watering and monitoring system. The system uses SparkFun’s Blynk ESP8266 board to read various sensors that monitor sunlight, moisture content of the soil, and detect the level of water remaining in the watering reservoir. The Blynk signals our 5V relay module to activate the system’s water pump, which irrigates the plants through a drip system. You can read more about LuisLabMO’s watering system in his post, which also has a link to his Hackster.io project page and GitHub repository.

Pololu ball casters used as "feet" for quadcopter
 |
One of our customers, Jeff, found a creative way to use some of our 1″ ball casters. He was having a problem with the legs of his quadcopter “grabbing” when he landed, so he attached a ball caster to the end of each leg. You could read more about his modification and find more pictures of his quadcopter in his post on the RCGroups.com forum.
Related products

Tru.D 3D
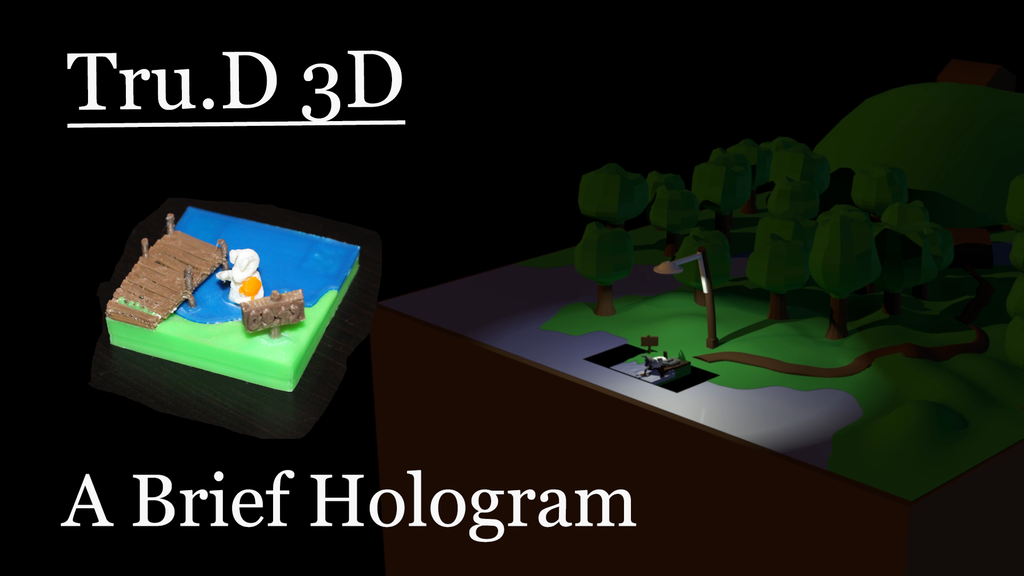 |
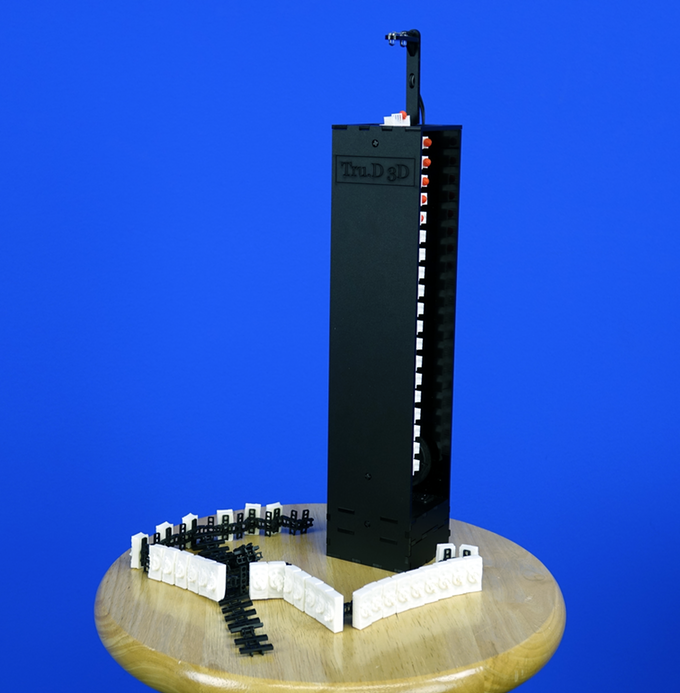
On Monday, Colin McGinn launched a Kickstarter in order to create a 3D short film using Tru.D 3D, which is a volumetric display system that he designed and patented. The system quickly feeds 3D volumetric objects into a specific viewing area, and each 3D piece forms a frame of an animation to tell a story that can be viewed from any angle.
Included among the Kickstarter rewards is a mini Tru.D 3D machine, which uses our micro metal gearmotors and magnetic encoders to perform a short, two-second animation. The machine is small enough to hold in your hands, and backers have the option of choosing from one of three different animations.
 |
You can find more information on Colin’s project, including the full digital version of the short film, on his Kickstarter.

MSOE underwater robotics ROV
 |
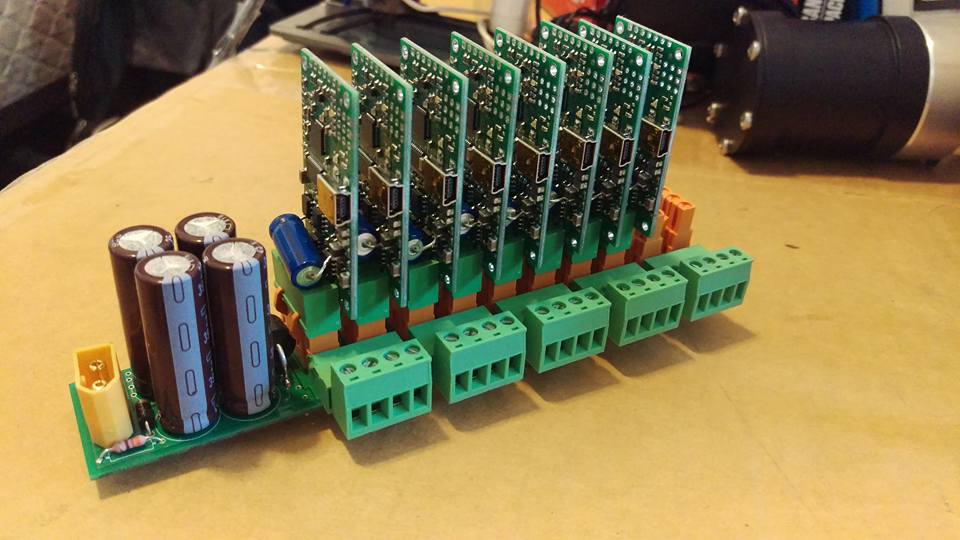
The Milwaukee School of Engineering (MSOE) underwater robotics team has been building remotely operated vehicles (ROV) to compete in underwater ROV competitions for several years. In the past, they have created custom motherboards that our 18v15 Simple Motor Controllers could plug directly into:
 |
Custom Simple Motor Controller motherboard for MSOE underwater ROV. |
|---|
The team is now using our newer G2 High-Power Motor Driver 18v17, which allowed them to save space in the newest iteration of their motherboard.
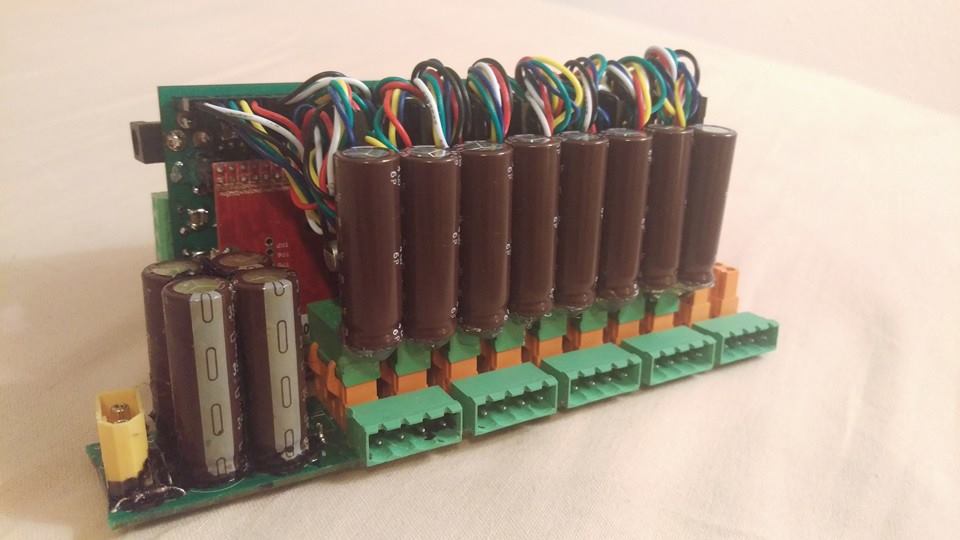 |
Custom G2 High-Power Motor Driver motherboard for MSOE underwater ROV. |
|---|
For more information and updates, check out the group’s Facebook page.
Related products


Maestro automated observatory

Our customer Robert sent us this spectacular image of NGC 1073 from his backyard observatory after we helped him get a SPDT Relay Carrier working with his Mini-Maestro 18-Channel servo controller. We thought it was pretty cool, so we asked him a bit more about how he captured it and how he is using the Maestro in his observatory. Continued…
Room mapping robot based on the Rover 5 chassis
This robot, created by theophil on Let’s Make Robots, uses a Rover 5 chassis with encoders, a MinIMU, sonar sensors, and a few expansion plates to do room mapping. Theophil modified the chassis to use Dagu Wild Thumper wheels, and made a custom 3D-printed adapter for connecting the wheels in a compact way. The program for the robot, which is available on GitHub, collects data from the sonar sensors about how far away objects are and creates a grayscale map where the darkness of a pixel corresponds to the robot’s confidence that an obstacle exists in that spot.
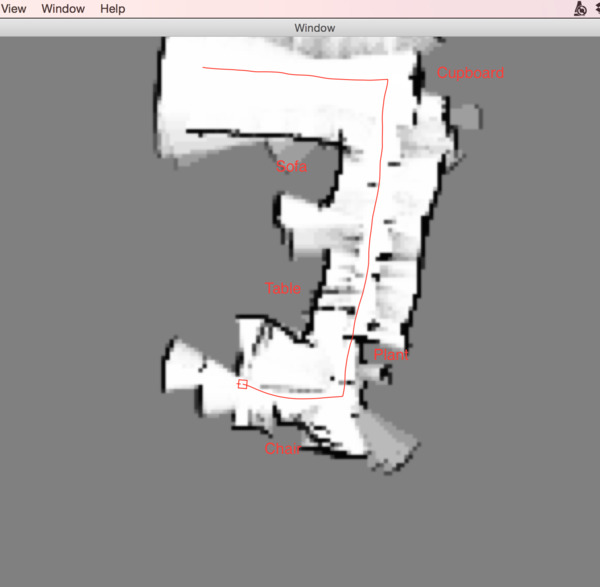 |
Example map made by theophil’s mapping rover. |
|---|
The program also includes a movement algorithm meant to drive the robot along paths that take it close to many obstacles to increase the accuracy of the sonar sensors. More about theophil’s room mapping robot can be found in his Let’s Make Robots post.
Related products






3D-printed mecanum wheel rover
One of our forum members, gchristopher, posted about his 3D-printed mecanum wheel rover. The rover uses our D24V10F5 5V regulator and some of our TB6612FNG dual motor drivers.
You can find more information on his blog. Additionally, you can find the CAD files on the Thingiverse page, and his original forum post on our forum.
Related products


Grant's mini sumo robot: Rattata

Remember my super cool sumo robot? My sumo robot is different from regular sumo robots. It’s like my sumo robot is in the top percentage of mini sumo robots. Continued…
Video: Phone-controlled BB8 droid build tutorial
TechBuilder’s life-size phone-controlled BB8 droid uses a Pololu dual VNH5019 motor driver shield to drive two 19:1 37D metal gearmotors.
For step-by-step instructions for building this droid, see his DIY BB8 Instructables page.
Video: Rubik's Cube-solving robot
This “World’s Fastest” Rubik’s Cube-solving robot uses six DRV8825 stepper motor driver carriers, one for each face.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









