Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 5)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Custom laser cutting for retro-gaming TV enclosure
One of our customers used our custom laser cutting service to cut the birch plywood panels for his retro-gaming TV system that he sells on Etsy. The birch panels are stained with shellac. The system runs on a Raspberry Pi 3 Model B, to which you can connect (not-included) controllers with Bluetooth or USB. The Raspberry Pi’s Ethernet port, SD card slot, and 4 USB ports are accessible in the back.
 |
Related products


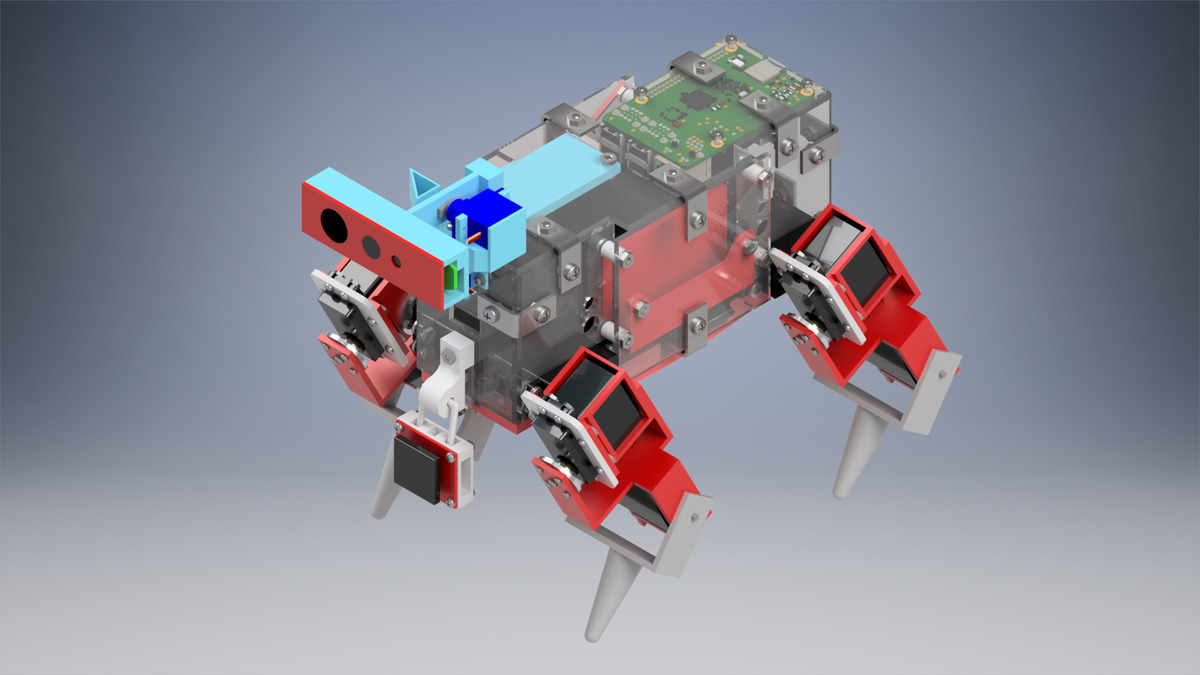
Semi-autonomous 14-DOF quadrupeds using Mini Maestro
Customer Lujing Cen’s team built two semi-autonomous 14-DOF quadrupeds using Mini Maestros for their high school class project at the California Academy of Mathematics and Science. The project syllabus includes making two separate robot designs and three total robots that work together. These quadrupeds were the “pack robots” described in the syllabus. An 18-channel Mini Maestro USB servo controller controls the twelve leg and two head servos. The project code includes a rewrite of Pololu’s Maestro C# USB SDK library in Python. The robot uses a camera and an RFID scanner to track its targets.
 |
For the complete project documentation including more pictures and videos, see their GitHub project page. Lujing also posted about it on the Pololu Forum.
Related products

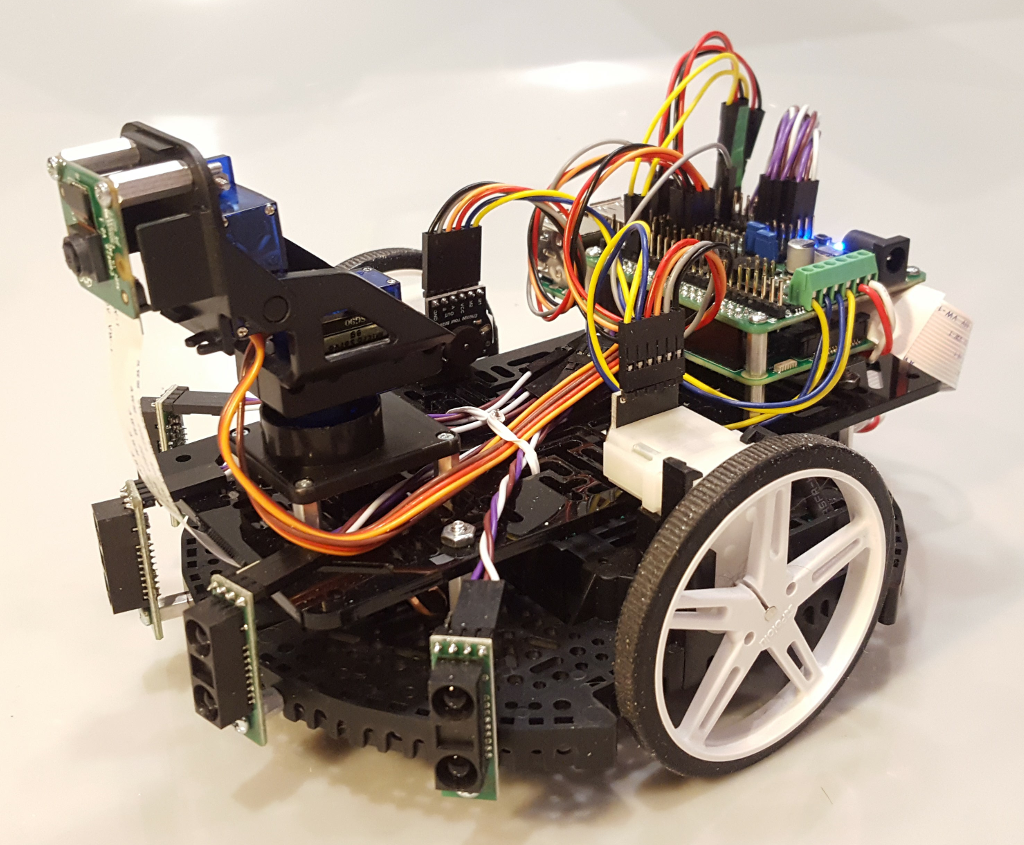
Romi and Raspberry Pi robot
Forum user DrGFreeman has been busy making robots. I wrote earlier about his Custom Mini Sumo robot; now here is his Romi Chassis and Raspberry Pi robot. It solves mazes using a webcam to do line tracking and intersection identification. This robot is a great example of how a variety of Pololu robot parts can combine into an attractive and functional robot. A black Romi chassis kit provides the base for the robot, to which DrGFreeman added a encoder pair kit and ball caster kit. An A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge drives the motors and monitors four Sharp GP2Y0A60SZLF analog distance sensors and the Romi encoders. The robot controller and the Raspberry Pi communicate via I²C and are elevated above the chassis on a narrow Pololu RP5/Rover 5 expansion plate.
DrGFreeman is also working on a mast for three VL53L0X time-of-flight distance sensor carriers that he plans to add for simultaneous localization and mapping (SLAM).
 |
For more videos, pictures, and details, see the forum thread. The robot’s Raspberry Pi (Python) and Arduino code is available on GitHub.
Related products







Raspberry Pi, A-Star 32U4, and Wild Thumper robot
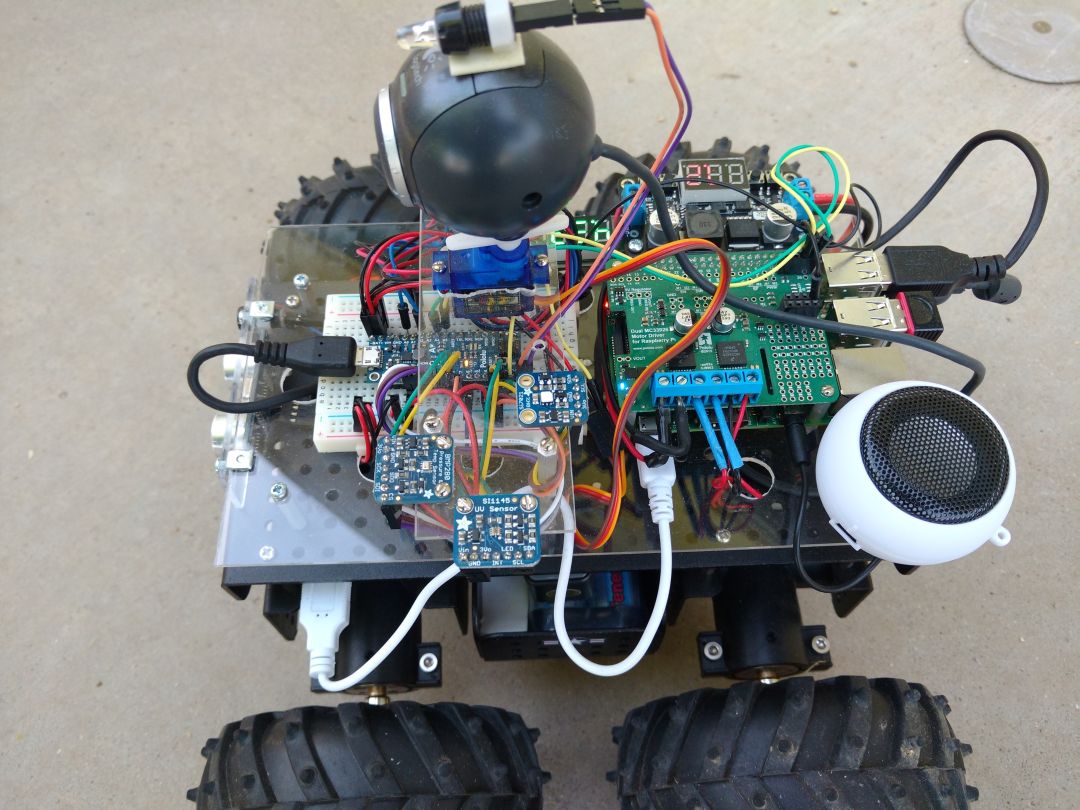 |
Forum user coyotlgw made this teleoperated Raspberry Pi robot. The robot is controlled remotely over SSH via the Raspberry Pi’s WiFi connection, and snapshots of the webcam feed are available via a Motion web server. The motors of the Dagu Wild Thumper 4WD chassis are driven by a Pololu Dual MC33926 Motor Driver for Raspberry Pi connected to a Raspberry Pi 2 Model B. A Pololu A-Star 32U4 Mini LV interfaces with and records readings from temperature, pressure, humidity, and UV/IR/visible light sensors.
It wasn’t available when they built the robot, but coyotlgw points out the A-Star 32U4 robot controller with Raspberry Pi bridge is an option to consider for similar builds. This robot connects the Raspberry Pi and A-Star Mini with USB; the robot controller would make I²C communication easier. You would still need external motor drivers, because the robot controller’s MAX14870 is not appropriate for the Wild Thumper motors.
For more pictures, details, and a discussion of the issues encountered during the build, see the forum post.
Related products




Bionic hand
Customer Elise Pham made a bionic hand: a two-fingered gripper triggered with biofeedback. A Pololu Maestro servo controller monitors the trigger source and signals the servo to close the gripper. In this video, she uses a mechanical sensor for biofeedback, and she is exploring using a MyoWare Muscle Sensor as a future enhancement. Her earlier video shows using a MyoWare Muscle Sensor to control a servo like in our demonstration video.
April 10 update: Elise’s project won 1st Award for the 2017 Synopsys Science Fair and was also nominated to advance and compete in the 2017 National Broadcom MASTERS. Additionally, Elise was selected by the Santa Clara County Office of Education to participate in Steve Wozniak’s Silicon Valley Comic Con Science Fair.


Raspberry Pi line following with QTR-8RC and WiringPi
Customer Thomas Broughton made a line follower robot controlled by a Raspberry Pi that directly connects to a Pololu QTR-8RC reflectance sensor array. A Raspberry Pi is not typically good for a timing-sensitive application because it runs a regular computer operating system, so it’s nice to see Thomas was able to get it to reliably read the sensor array. The robot also uses four 42×19mm pololu wheels, a Pololu 5V Step-Up/Step-Down Voltage Regulator S18V20F5, and two Sharp distance sensors.
 |
His Python code and more discussion are in his blog post.
Related products



Bartending robot
 |
Two Bit Circus is building a “micro-amusement park” in Los Angeles, and this robotic bartender will be one of the exhibits. It uses peristaltic pumps to load libations into hand-held shakers, mixes the drinks, and dispenses them. The animatronic motions of the robot are orchestrated by a Maestro servo controller and a Raspberry Pi.
More pictures and details can be found in the Make magazine article featuring the robot.
Related products

Zumo 32U4s with CMUcam5 Pixy
Customer Carlos Ambrozak developed an “Introduction to Robotics” course that includes a lab where students work on visual object tracking. The example project is two Zumo 32U4 robots playing cat and mouse. One Zumo has a large blue ball on it and drives around avoiding obstacles. The other has a CMUcam5 Pixy on a pan-tilt mount that looks for the blue ball and follows the other robot. The Zumo 32U4 controls the camera via I2C. The lesson’s provided source code is available on GitHub.
Related products

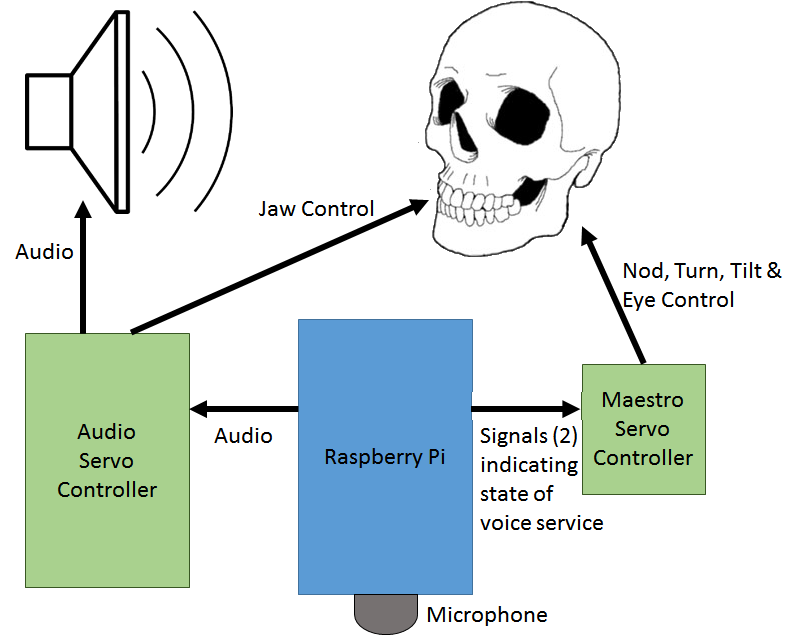
Talking skull uses Amazon Alexa
Customer Mike McGurrin made this animatronic talking skull that uses Amazon Alexa for interactive voice control. The central part of the project is a Lindberg 3-axis animatronic skull and audio servo controller, which makes the jaw movements follow the audio voice. In this project, the nod, turn, tilt, and eye movements of the skull are controlled by a 12-channel Maestro servo controller running a custom Maestro script that uses one of the channels as an input that is triggered by the Raspberry Pi. The Amazon Alexa integration is handled by AlexaPi.
 |
More details including a parts list and the Maestro Script are available on the project page.

Custom Mini Sumo robot
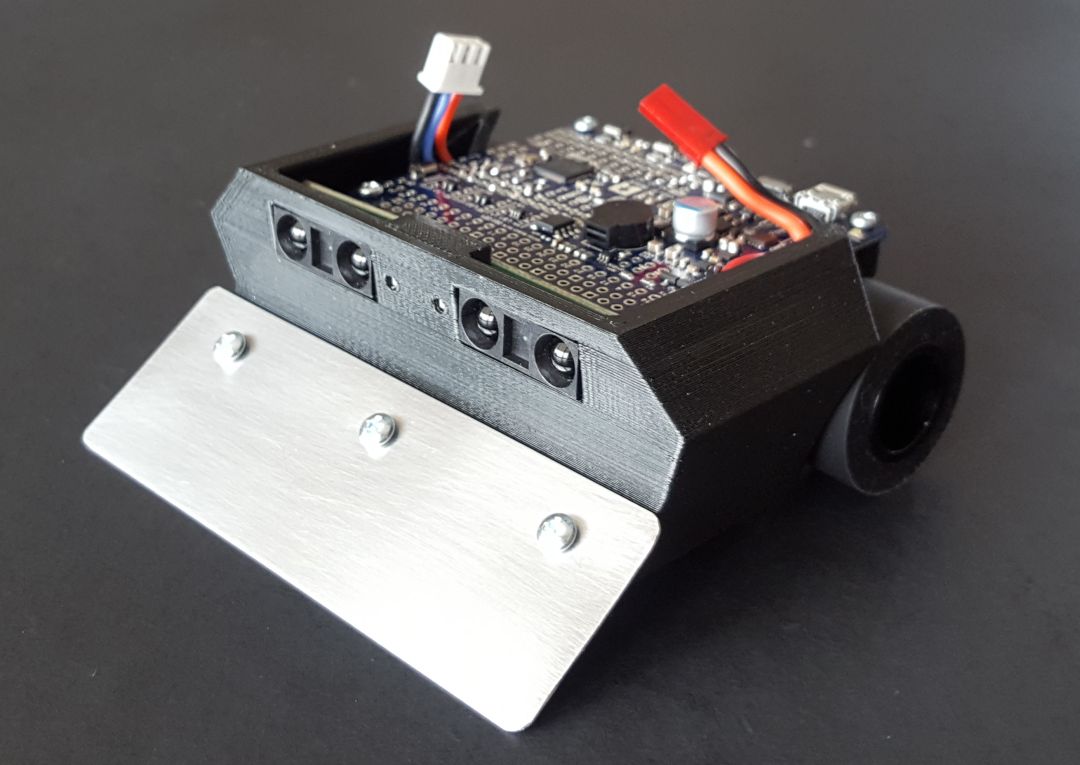 |
Forum user DrGFreeman has been posting about his custom Mini Sumo robot. He designed the chassis in CAD and 3D printed it; the model is available on Thingiverse. An A-Star 32U4 robot controller reads the QTR-1RC reflectance and Sharp GP2Y0A60SZLF analog distance sensors while powering the motors with its dual onboard motor drivers. DrGFreeman plans to build two copies of the robot: one with 75:1 micro metal gearmotors and one with 50:1 micro metal gearmotors so he can pit them against each other and figure out whether more speed or torque does better. This video shows the behavior he’s programmed so far:
The whole build log along with more pictures and discussion is in the forum post.
Related products








Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










