Pololu Blog »
Semi-autonomous 14-DOF quadrupeds using Mini Maestro
Customer Lujing Cen’s team built two semi-autonomous 14-DOF quadrupeds using Mini Maestros for their high school class project at the California Academy of Mathematics and Science. The project syllabus includes making two separate robot designs and three total robots that work together. These quadrupeds were the “pack robots” described in the syllabus. An 18-channel Mini Maestro USB servo controller controls the twelve leg and two head servos. The project code includes a rewrite of Pololu’s Maestro C# USB SDK library in Python. The robot uses a camera and an RFID scanner to track its targets.
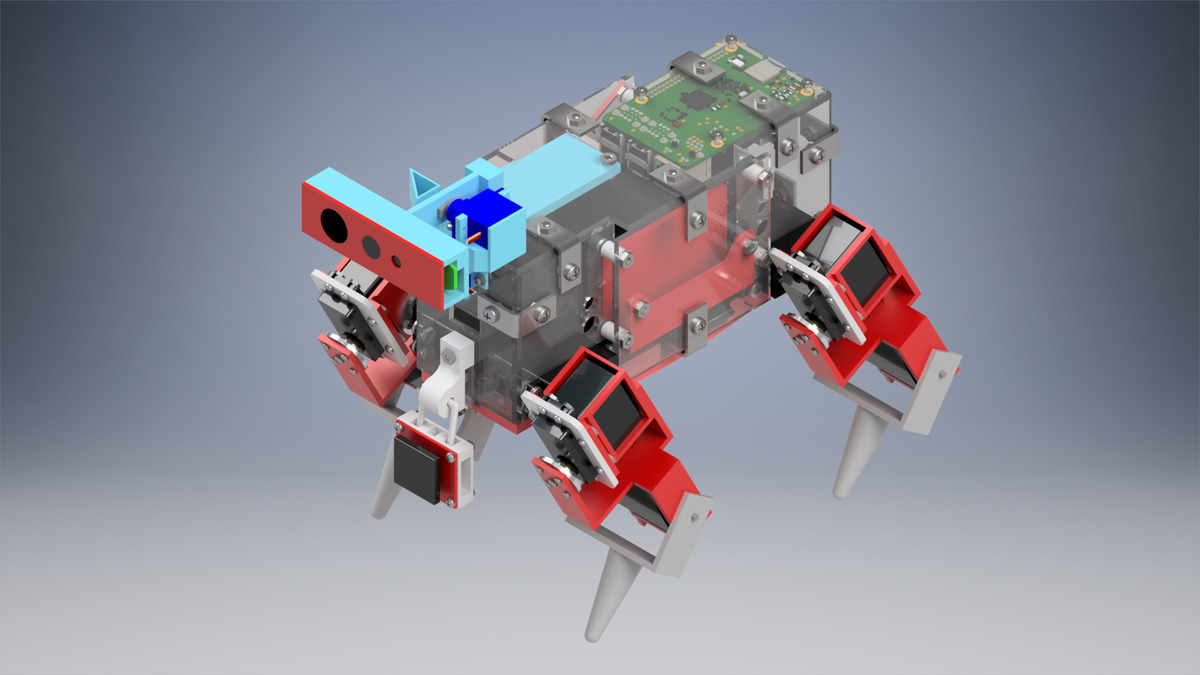 |
For the complete project documentation including more pictures and videos, see their GitHub project page. Lujing also posted about it on the Pololu Forum.
Related products

-

FEETECH High-Torque Servo FS5115M
- 31 March 2017We added the FEETECH High-Torque Servo FS5115M to our expanding RC servo selection. This standard-size analog servo has a stall torque of 215 oz-in...
-

Custom laser cutting for retro-gaming TV enclosure
- 5 April 2017One of our customers used our custom laser cutting service to cut the birch plywood panels for his retro-gaming TV system that he sells on Etsy....
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
