Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 10)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
VertiGo robot drives up walls with propellers
VertiGo is a novel robot designed with one main goal: the ability to drive on floors and walls, even if the walls aren’t perfectly flat. To accomplish this, it uses tiltable propellers for propulsion rather than motorized wheels. The propeller tilting is controlled by two Pololu Jrk 21v3 USB motor controllers with feedback. Students at ETH Zurich made this robot in collaboration with Disney Research Zürich.
You can visit the VertiGo website for pictures and project news.
Related products

The Purdue Tuggiteers' spring 2015 senior design project
 |
For their senior design project in the spring semester of this year, a team of Mechanical Engineering students (the Tuggiteers!) from Purdue made a remotely-controlled plane-towing vehicle that uses one of our step-up/step-down regulators. The team shared with us this video of their final review, which demonstrates the vehicle approaching, connecting to, and towing a single-engine aircraft:
This next video captures their vehicle’s first test. An on-board camera allows you to get a 1st-person view of the latch actuating and gripping the aircraft wheel:
We are always excited to see our parts getting used in cool projects, and we were especially excited to see this because it looks way easier than doing it the usual way:
 |
Ben, pushing a plane (before he started Crossfit). |
|---|
Related products

Pi Wars 2015
There is a nice recap on the Raspberry Pi blog of the Pi Wars 2015 competition that was held last weekend on December 5th, 2015. It is a robotics competition held in Cambridge, UK that focuses on robots controlled by a Raspberry Pi. I noticed a lot of Pololu parts on the robots in the videos. Just a few examples are wheels and tracks, motors, and reflectance sensors. I didn’t see any A-Star 32U4 robot controllers in the videos, but I think that would make a great controller for a robot in the next competition because it can be used as a Raspberry Pi expansion board!
You can check out the Pi Wars 2015 post for more details.


Patrick's mini sumo robot: Covert Ops

Hi, my name is Patrick. I am an engineering intern at Pololu and am studying at the University of Nevada, Las Vegas to earn a mechanical engineering degree. I decided to build a custom robot to compete in the recent LVBots mini-sumo competition here at Pololu. It was my first competition at LVBots. I started out by watching a compilation video of the previous sumo competition at LVBots since I had never competed in a mini-sumo competition before. My goal was to create a robot that could out maneuver other robots and had as few vulnerabilities as possible. To achieve this goal, I decided to build a robot that would be high speed and able to push opponents from both sides of the robot with a lot of force. The result of my efforts is the robot I call Covert Ops. Continued…
Kevin's mini-sumo robot: Roku
My robot, Roku, was the champion of LVBots’ August mini-sumo competition. While I didn’t have the time or inspiration to make it look like anything more interesting (like a Star Wars droid) or make use of especially innovative tactics, I think I managed to build a robot that not only is effective but also looks fairly clean and well put together. In addition, it’s a good demonstration of how the Pololu A-Star 32U4 Robot Controller can be used as a standalone main board for a small robot. Continued…
Video: MyoWare Muscle Sensor demonstration with Maestro servo controller
 |
I got your torque right here ;) |
|---|
Now that we are carrying Advancer Technologies’ MyoWare Muscle Sensor, it is time to update our demonstration video! I’ve had two whole years to add some mass to my biceps (during which time I continuously worked on those bad boys for a grand total of four weeks), and now I can proudly present to you these sick gains.
The demonstration is basically a redo of the original muscle sensor demo with the new sensor, except for a few small differences (honestly, my biceps are not that much bigger). In this setup, a 6-channel Maestro reads the muscle sensor’s analog voltage output and commands the position of a Power HD servo. The Maestro’s +5 V (out) pin supplies power to the MyoWare Muscle Sensor, and the servo and Maestro are powered by 4 rechargeable AA batteries. On a personal note, I found it really satisfying to use a single power source for this demonstration, which is not something you can do with the previous version of this muscle sensor, as it requires two supplies. (Be sure to check out the MyoWare Muscle Sensor’s product page to read about more ways the new muscle sensor improves upon the older version!)
This Maestro script is slightly more interesting than the script in the last demo, since the servo’s default direction of rotation was the opposite of the motion for a bicep curl (and we were already quite happy with the servo’s orientation with respect to my arm for the planned video footage). To get around this, and make the servo arm movement match the position of my arm during a bicep curl, I did some basic math and came up with an equation that you can see in the code below:
# Sets servo 1 to a position based on the analog input of the MyoWare Muscle Sensor.
begin
8000 # put this value on the stack (for why, see line 5)
0 get_position # get the value of the muscle sensor's signal connected to channel 0
4 times minus # y = -4x + 8000 , which is an equation we use to deal with the servo's
# default direction of rotation and scale the Maestro's Target
# value to roughly 4000-8000 (approximately 1-2 ms)
# which is the range of servo pulses that corresponds
# to the motion we want.
1 servo # set servo 1 accordingly
repeat
You can, of course, use other devices to read the analog voltages from the MyoWare Muscle Sensor. If you have not already, you might try using one of our A-Stars!
If you have a project that uses the MyoWare Muscle Sensor, we would be pumped to hear about it!
Related products



One-sixth scale Mark 1 British Heavy Tank by Helen Lawson
 |
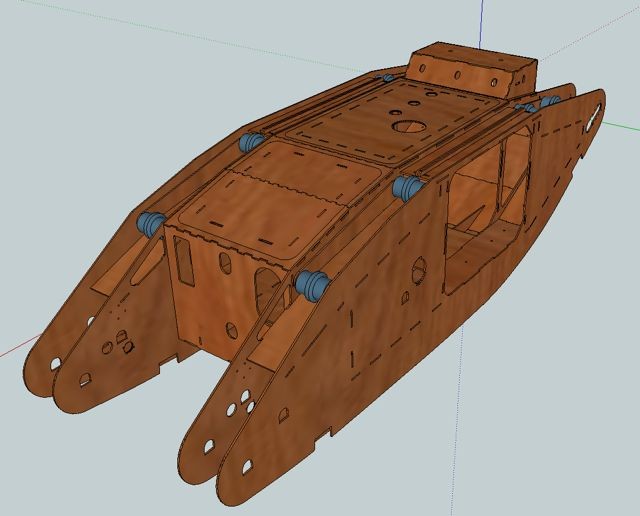
Helen Lawson designed and built a one-sixth scale Mark 1 British Heavy Tank replica that is a functional, radio controlled robot. The replica has been a work in progress for around three years and is now reaching completion. Helen designed the main chassis out of laser-cut wood and made other aspects of the chassis from aluminum and 3D printed parts.
|
|

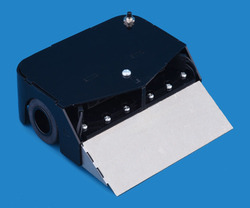
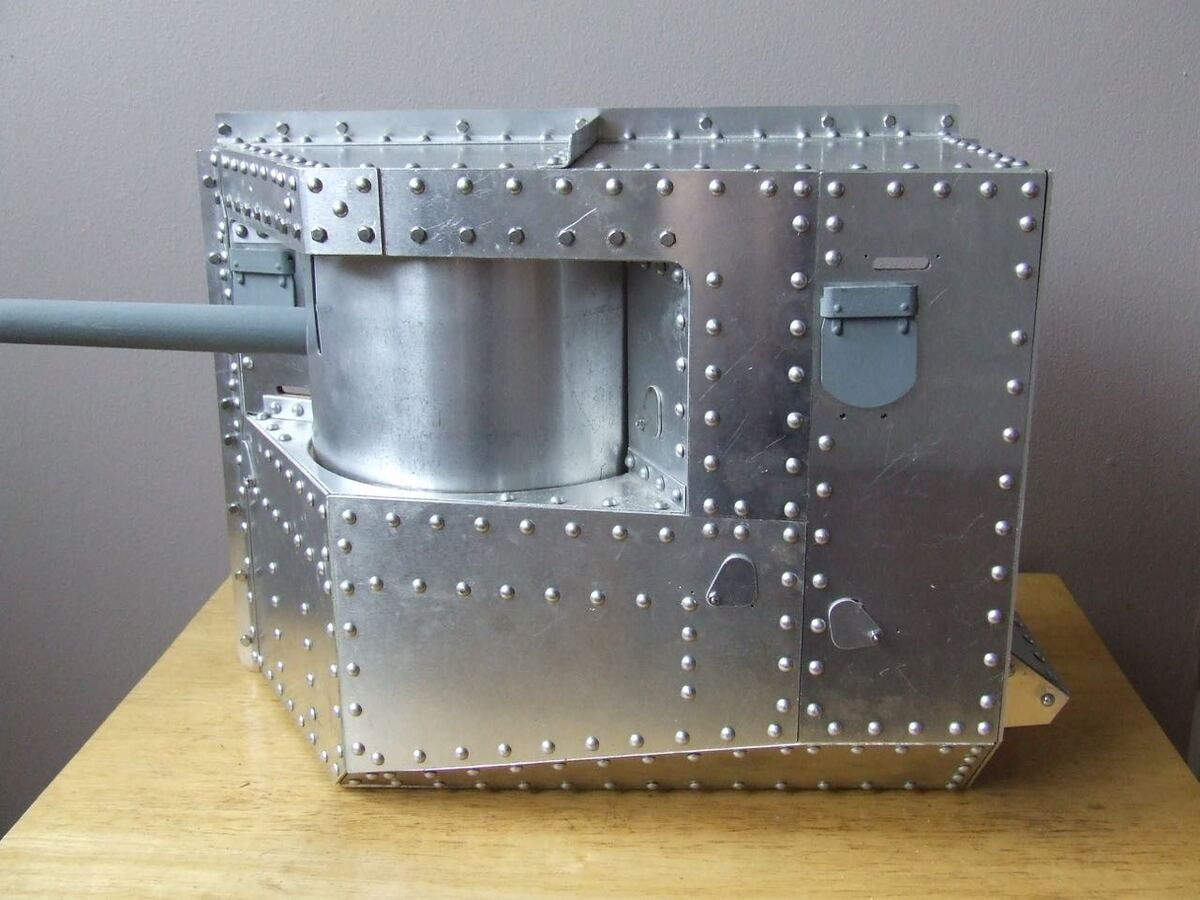
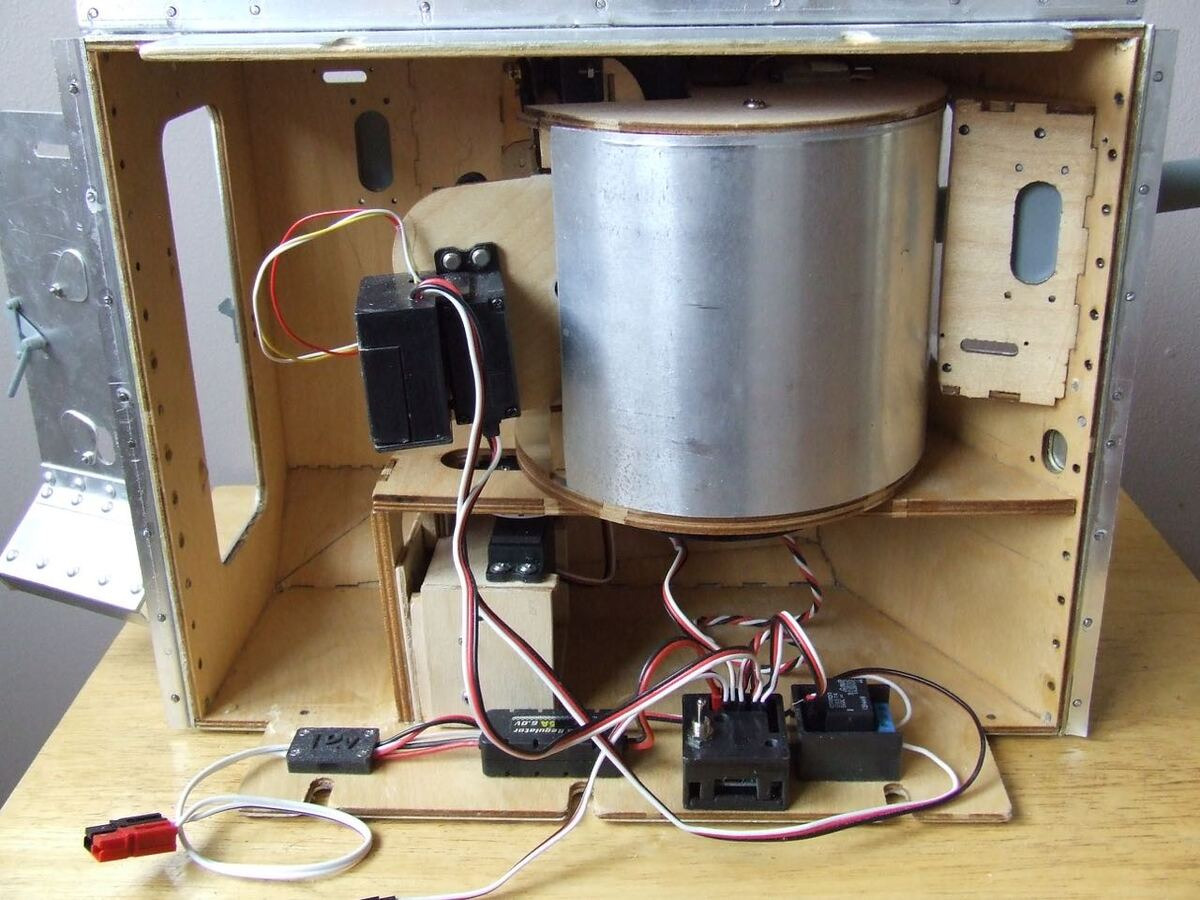
One distinguishing feature of a MK 1 British Heavy Tank is the lack of a central turret. Instead, it has a sponson on each side. This proved challenging for Helen’s build since most electronics made for RC tanks only allow for a single gun and turret. To make the sponsons functional, Helen used a combination of an RC receiver, an RC switch with digital output, an RC switch with relay, a Micro Maestro servo controller, a few servos, and a Taigen gun flash unit. You can find more detailed information about this part of the system (including a wiring diagram and Maestro script) in her post on our forum. The images below show each side of one of the completed sponsons:
|
|
She also made a 3D-printed case for the Maestro (shown in the photo on the right) and a few of the other electronic components, which she made available on her Thingiverse page.
You can see a video of the robot in action on this Portsmouth Model Boat Display Team Armoured Division Facebook page, and even more information on her build, including many more pictures, in Helen’s forum thread at landships.net.
Related products


Brandon's mini sumo robot: Black Mamba
Before I started designing my entry into this year’s LVBots mini sumo competition, I watched several videos of other competitions. I noticed a majority of the victories came from engaging the opponent from the side or back; a pattern I also noticed during the last LVBots mini sumo competition. For that competition, I made a robot that used a blade and sensors on the front and back of the robot (basically making the robot have two fronts and no back). However, my strategy in that competition was to roam the ring and search for the opponent, which I suspect increased the chances of the opponent engaging from a suboptimal angle. This time, I wanted to try having my robot spin in place looking for the opponent and striking once it was found. This ultimately resulted in my newest mini sumo robot, Black Mamba. For those unfamiliar, a black mamba is a snake with a reputation for being highly aggressive and is one of the longest and fastest-moving snakes in the world. A black mamba’s venom is highly toxic, and it is capable of striking at considerable range, occasionally delivering a series of bites in rapid succession. Black Mamba is also Kobe Bryant’s self-appointed nickname (yes, I am a Lakers fan). Continued…
Prototyping hexapod motion with a Maestro USB servo controller
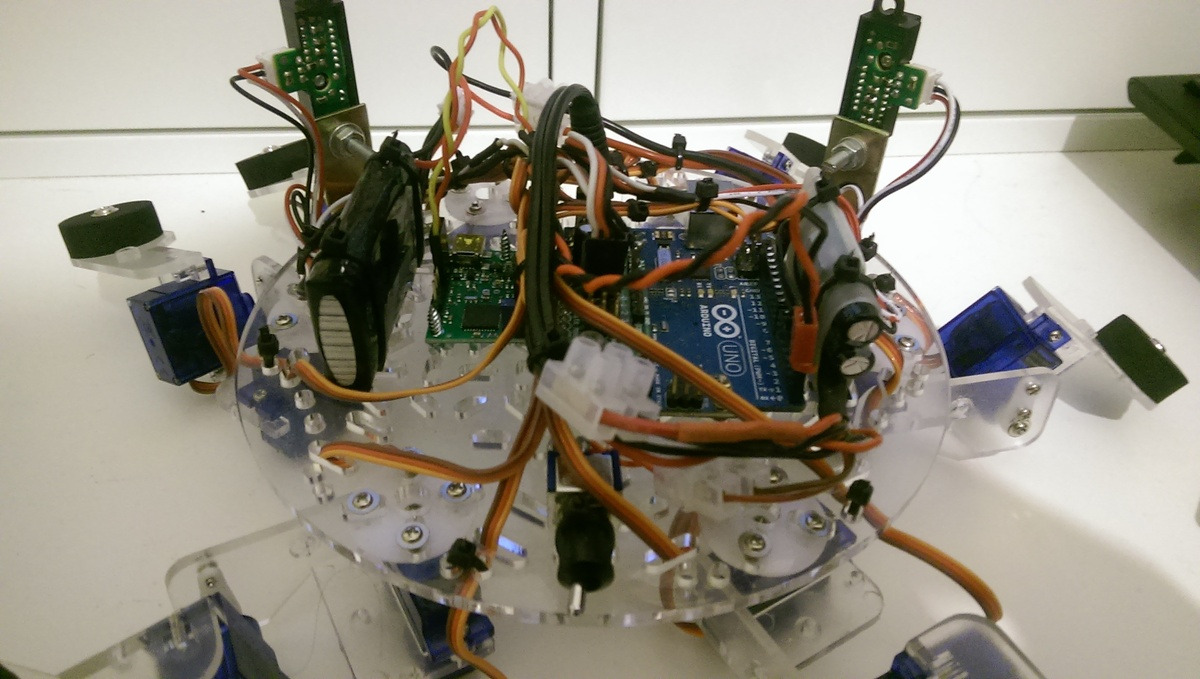 |
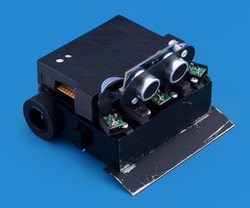
Chris Barlow posted this interesting write-up about how he is using the USB connection of a Mini Maestro servo controller to prototype motion control for his hexapod robot. He has been going over the build in detail on his blog, so check it out over there, and be sure to take a look at this short video below:
Motion tracking skeleton at Cedar Gables Inn
Forum user Ken constructed a spine-chilling Halloween project that is featured at the Cedar Gables Inn Bed and Breakfast in Napa, California. His project is based on Brandon’s Motion Tracking Skull Halloween prop, but instead of just using a head-turning skull, Ken used a full-scale skeleton body to complete the creepy look.
 |
Motion tracking skeleton at the Cedar Gables Inn. |
|---|
Just like in Brandon’s example, Ken used two Sharp GP2Y0A60SZ analog distance sensors to detect objects (or humans) and a Micro Maestro servo controller to read the output values from the sensors and control the servo that moves the head. Ken improved on Brandon’s code by returning the skeleton’s head to its starting position after a short delay so the skeleton wouldn’t stare rudely at the inn’s guests.
 |
For more information about Ken’s Halloween project, see his forum post, and if you happen to be in the Napa Valley area this Halloween, stop by the Cedar Gables Inn and check it out in person!
In case you missed it, we have Maestros and Sharp distance sensors on sale right now as part of our Polo-BOO! Halloween Sale. The sale ends in less than two days, so if you want to try doing a project like this, now is the time to get started!

Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









