Pololu Blog »
TwoPotatoe balancing robot
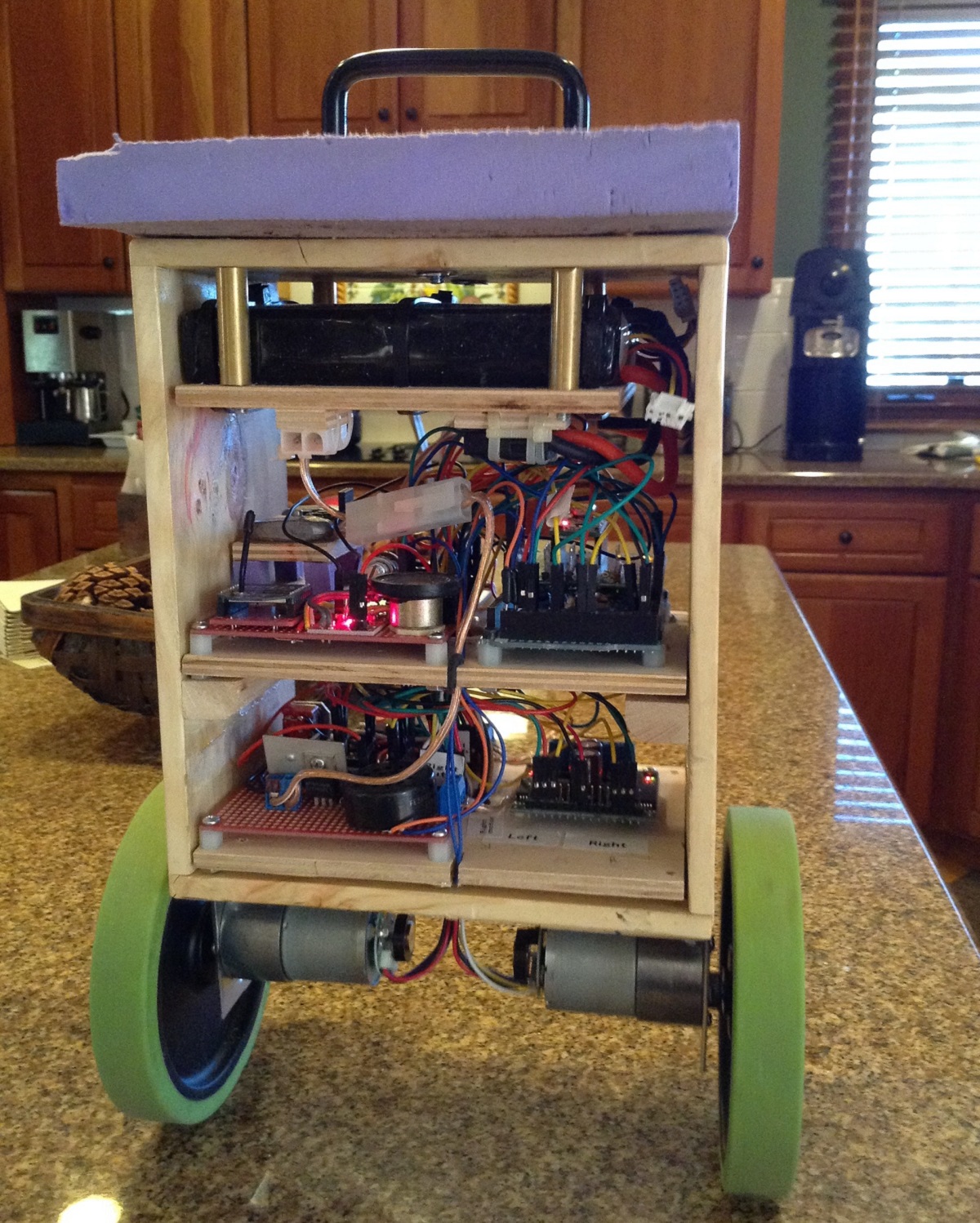 |
TwoPotatoe is a customer-built balancing robot that in its latest form uses an Arduino Mega to receive commands from a custom-made controller via XBees and a Wixel to wirelessly send telemetry to a PC. The robot uses feedback from a MinIMU-9 v3 IMU module’s accelerometer and gyro to maintain its balance, and it uses the MinIMU’s compass to navigate. The drive system consists of two 37D mm metal gearmotors with encoders controlled by a VNH3SP30 motor driver carrier.
You can see videos and read more about how TwoPotatoe works in the how it works section of its site.
10 December 2014 update: The old video of Twopotatoe has been replaced with a newer one. TwoPotatoe has also undergone a few changes: Arduino Due instead of the Arduino Mega, new motor controllers, new personality, etc. For more information about the changes and to see some new pictures, check out TwoPotatoe’s website.
Related products







-
New products: A-Star 32U4 Minis
- 18 July 2014A few months ago, we released the A-Star 32U4 Micro, a general-purpose microcontroller breakout board based on the Atmel ATmega32U4, and we...
-

New products: CC3000 Wi-Fi breakout board and Arduino shield from Adafruit
- 22 July 2014Adding wireless connectivity to an electronics project is a great way to enhance functionality and make it stand out. Our selection of wireless...
2 comments

Have looked on the 'How it works' section of your site, and am interested in your Speed and Position algorithm. Have you published the code yet, or if not, do you intend doing this?
Regards
Nigel

TwoPotatoe is a robot built by one of our customers, so I do not have the control algorithm. You might try using the "Leave a Message" feature on the website to contact its creator.
- Grant
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
