Pololu Blog » Posts tagged “new products” »
Posts tagged “new products” (Page 8)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New products: D36V28Fx Step-Down Voltage Regulators
 |
I am happy to announce the release of our newest regulators, the D36V28Fx family of step-down voltage regulators. These regulators support a wide input voltage range (up to 50 V!) and can deliver up to 4 A, making them well suited for use with power-hungry processors like the Raspberry Pi and projects involving servos or small motors.
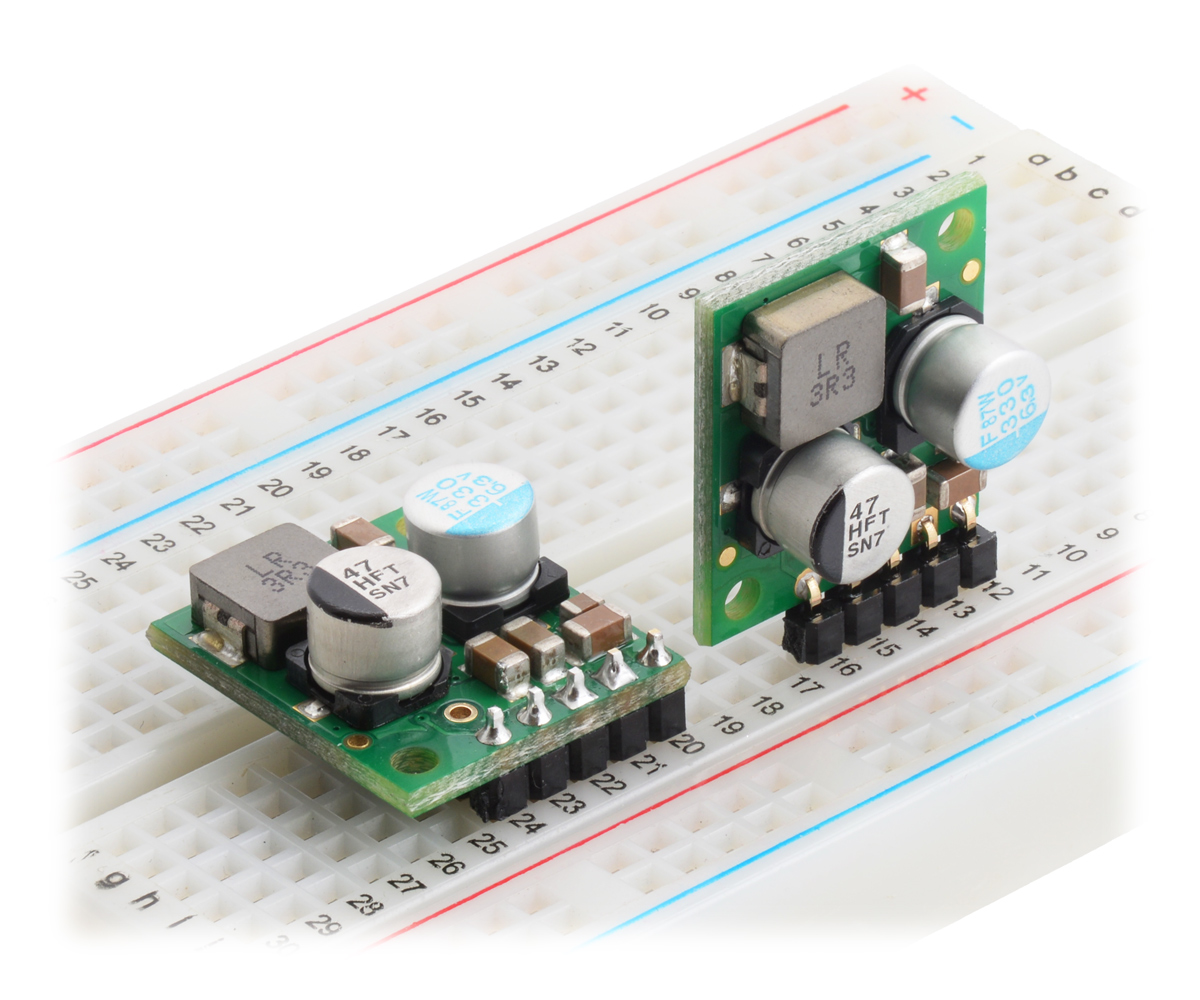 |
Step-Down Voltage Regulator D36V28Fx, assembled on breadboard. |
|---|
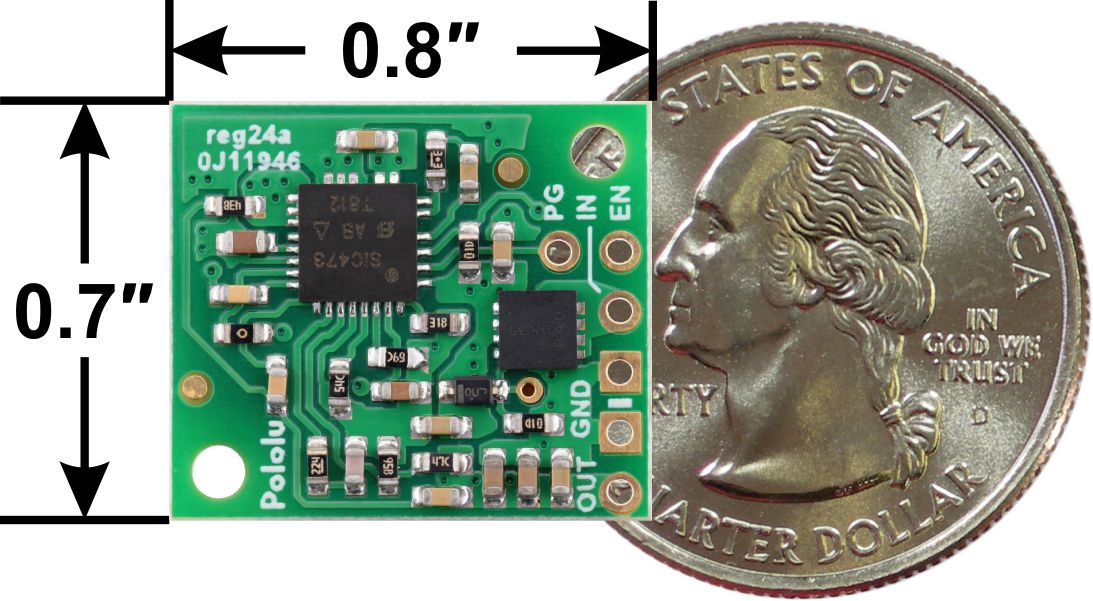 |
Step-Down Voltage Regulator D36V28Fx, bottom view with dimensions. |
|---|
The family consists of six fixed output voltage versions between 3.3 V and 12 V:
- D36V28F3: Fixed 3.3V output
- D36V28F5: Fixed 5V output
- D36V28F6: Fixed 6V output
- D36V28F7: Fixed 7.5V output
- D36V28F9: Fixed 9V output
- D36V28F12: Fixed 12V output
And since we make these ourselves here in Las Vegas, we can also quickly make versions with custom output voltages; please contact us us for more information.
Comparison to the D24V22Fx step-down regulator family
|
|


The D36V28Fx family now becomes our recommended alternative to the slightly smaller D24V22Fx if you need a little more power or operation above 36 V:
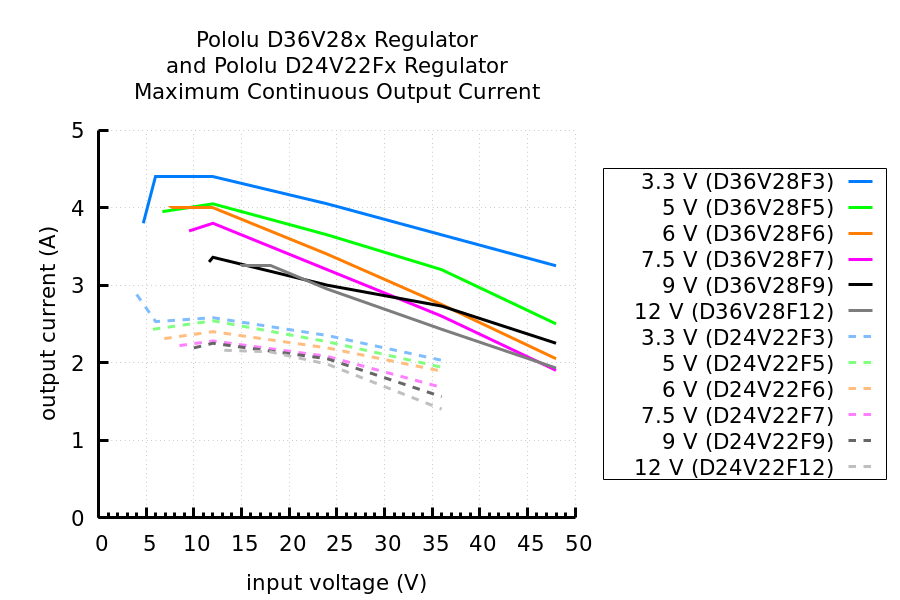 |
Comparison of the maximum continuous current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
The D24V22Fx still outperforms the D36V28Fx when it comes to dropout voltage and quiescent current:
 |
Comparison of the dropout voltage of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
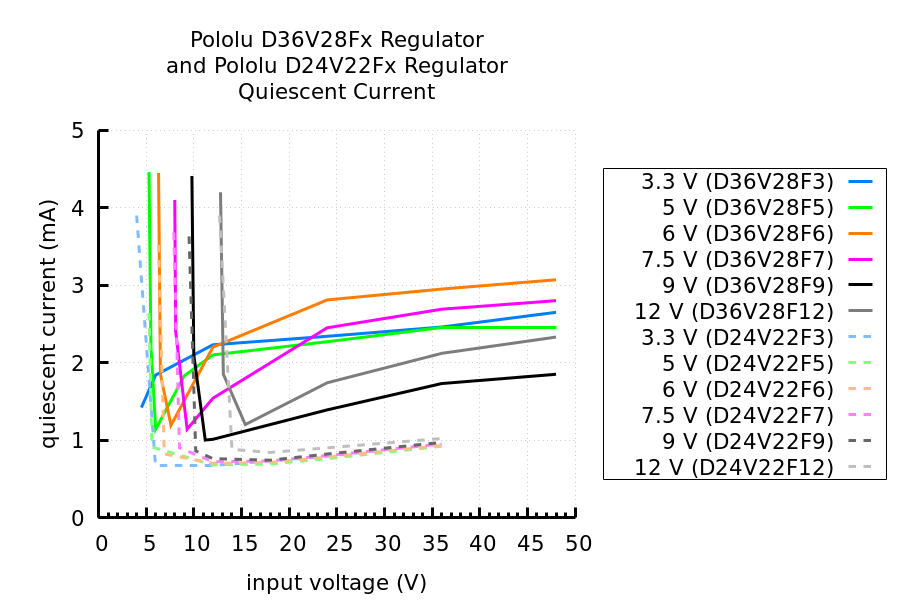 |
Comparison of the quiescent current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
Introductory special
As usual, we are offering an extra introductory special discount on these new regulators, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code D36V28XINTRO can get up to three units for just $7.77 each!
Related products






New products: ACHS-7121/7122/7123 current sensor carriers

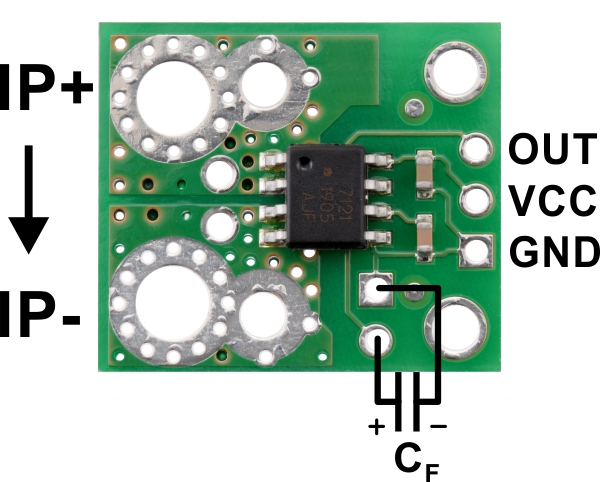 |
We are excited to offer new carriers for Hall effect-based linear current sensors from Broadcom. These easy-to-use bidirectional current sensors are available in three current range options:
- ACHS-7121 Current Sensor Carrier -10A to +10A
- ACHS-7122 Current Sensor Carrier -20A to +20A
- ACHS-7123 Current Sensor Carrier -30A to +30A
The ±10A and ±30A version have the same output sensitivity as our older ±5A and ±30A Allegro ACS714 Hall effect-based linear current sensor, respectively, so they should work as a drop-in replacement in many applications.
Introductory special
As usual, we are offering an extra introductory special discount on the ACHS-712x current sensor carriers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code ACHSINTRO can get up to five units for just $3 each!
Related products



New product: Case with Fan for RoboClaw 2x15, 2x30, and 2x45
|
|


With this new RoboClaw case, our selection of RoboClaw products just got even cooler – literally! In addition to protecting the motor controller, this case also has an integrated fan, which will allow an enclosed RoboClaw to deliver higher continuous currents and sustain peak currents longer. The case works with 2x15A, 2x30A, 2x45A, and ST 2x45A RoboClaw motor controllers and features cutouts for accessing the motor outputs and the various control input header pins.
Related products



Updated product: A-Star 32U4 Prime LV
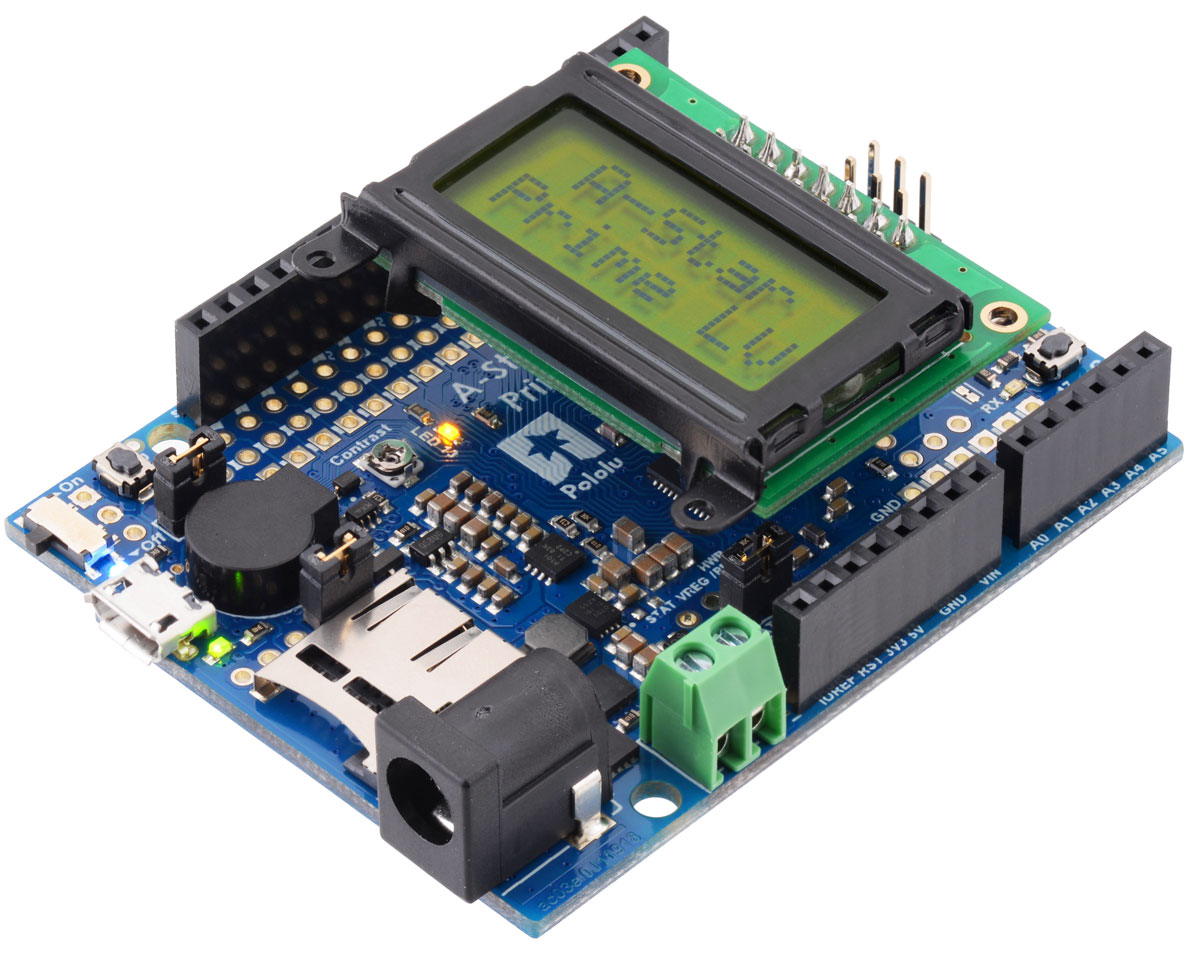
We have updated our A-Star 32U4 Prime LV with a new regulator that offers a wider operating voltage range and increased current capabilities. For those of you not already familiar with our A-Star 32U4 Primes, they are a series of ATmega32U4-based, USB-programmable controllers with integrated regulators that offer operating voltage ranges not available on typical Arduino-compatible products; this new “LV” variant features an improved buck-boost converter that enables efficient operation from 2 V to 16 V power supplies (Note: it requires an input voltage of at least 3 V to start, but it can operate down to 2 V after startup). The A-Star Primes are arranged in the common Arduino form factor exemplified by the Uno R3 and the Leonardo, so they are compatible with many Arduino shields, including all of the Arduino shields we carry.
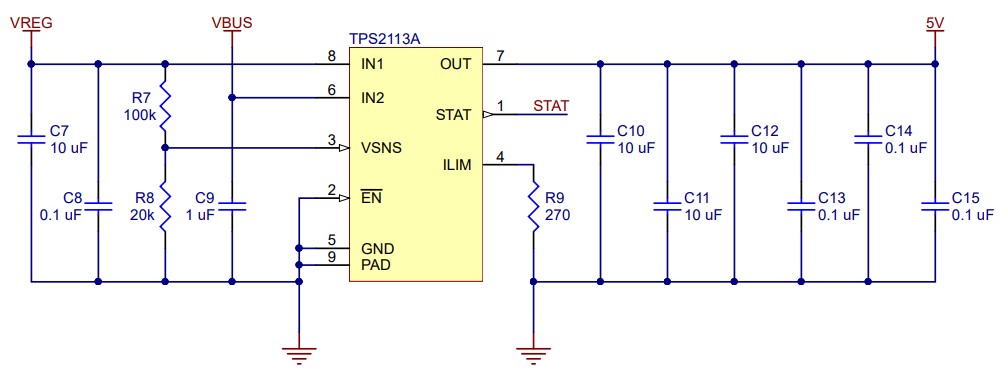
In addition to the increased input voltage range for the new A-Star Prime LV, the new regulator also provides more current. The graph below shows the current available on the new LV (ac03e) in blue compared to the old LV (ac03b) in purple. It is important to note that to use the full current available on the new A-Star Prime LV, you must connect to the VREG pin on the board and not the 5V ouput pin. The 5V output pin is limited to about 1.9 A because of the TPS2113A power multiplexer that makes up the board’s power selection circuit (a feature that sets the A-Star Primes apart from competing products). The power multiplexer decides whether the board’s 5 V supply is sourced from USB or an external supply via the regulator, allowing both sources to be connected at the same time and enabling the A-Star to safely and seamlessly transition between them. The multiplexer is configured to select external power unless the regulator output falls below about 4.5 V. If this happens, it will select the higher of the two sources, which will typically be the USB 5 V bus voltage if the A-Star is connected to USB. More information about the multiplexer can be found in this section of the A-Star 32U4 user’s guide under the Power heading.
|
|

The original version of the A-Star Prime LV, which operates from 2.7 V to 11.8 V, is now on clearance for 40% off! If you don’t need the increased output current and wider voltage range the new board offers, the previous version is still a great programmable controller to consider. Both the new and original A-Star Prime LVs come in multiple configurations. The complete selection of both versions can be found in the related products list below.
Related products










New product: 24V Step-Up/Step-Down Voltage Regulator S18V20F24
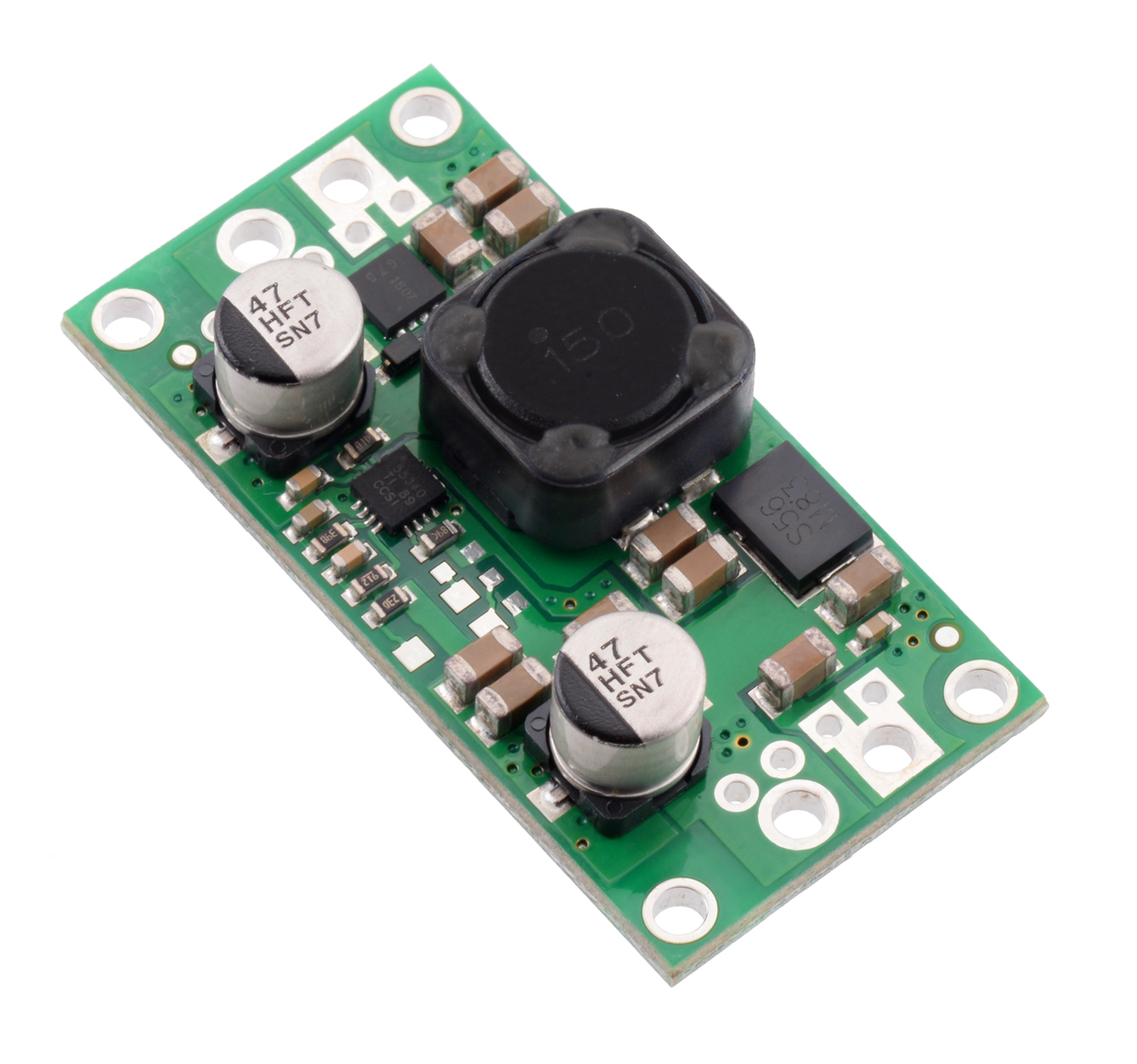 |
The 24V Step-Up/Step-Down Voltage Regulator S18V20F24 is the newest addition to our line of S18V20x step-up/step-down voltage regulators.
This 24 V fixed-voltage version is a minor modification of the 9 V to 30 V adjustable version we have been making for years. We can make custom-voltage versions of most of our regulators, and this particular unit was initially one of those customizations we routinely offer. However, since 24 V seems like it might be common enough to be interesting to other customers, we have made it a stock product. Since we assemble these at our Las Vegas, Nevada facility, we can often make simple customizations that only require component changes within a few days. Besides changing output voltages on regulators, these changes could include changing LED colors, omitting components such as pull-up or pull-down resistors, and substituting components with higher temperature ratings or better tolerances. (We offer more involved customizations that require modified board layouts or new firmware features, but those take longer and have higher up-front engineering costs.)
 |
Pololu electronics manufacturing area with multiple pick and place lines. |
|---|
For those of you interested in the details of the actual product, the S18V20F24 efficiently produces a fixed 24 V output from input voltages between 3 V and 30 V while allowing a typical output current of up to 2 A when the input voltage is close to the output voltage. Its ability to convert both higher and lower input voltages makes it useful for applications where the power supply voltage can vary greatly, as with batteries that start above but discharge below the regulated voltage. Other features include integrated reverse-voltage protection, over-current protection, over-temperature shutoff, and under-voltage lockout.
|
|

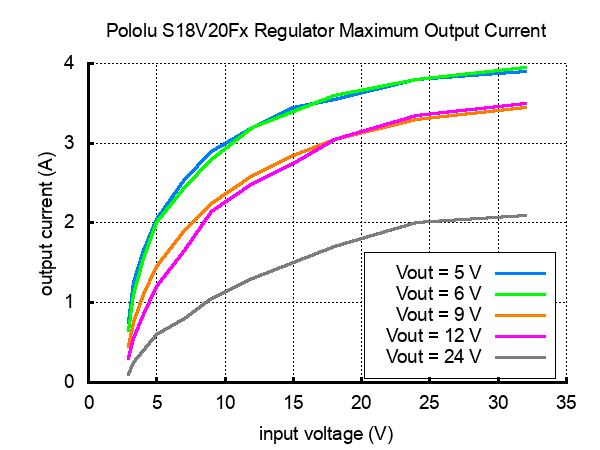
Alternate versions of this regulator include a fixed 5 V, 6 V, 9 V, or 12 V output or an adjustable 4 V to 12 V or 9 V to 30 V output. Our full selection of regulators and power supplies can be found here.
Related products




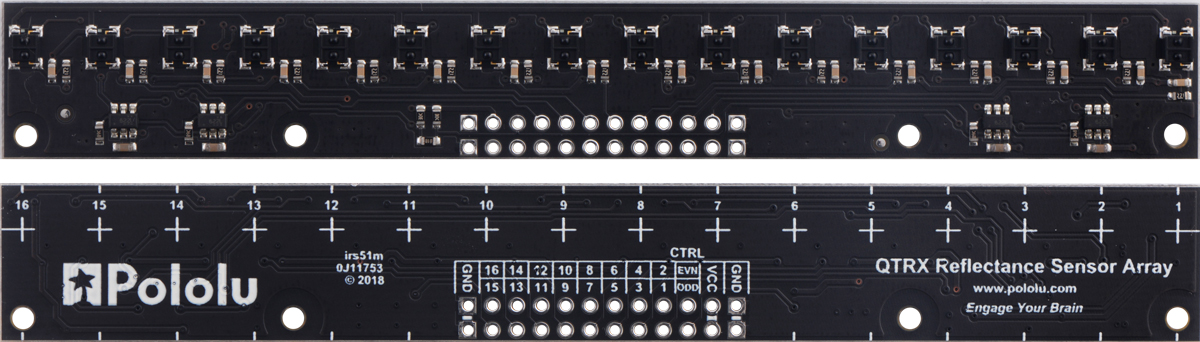
New products: 16 more QTR reflectance sensor arrays
Our rapidly growing selection of new QTR sensors now includes high-density (HD) versions with 13 and 25 channels, and medium-density (MD) versions with 7 and 13 channels. These QTR sensors are well suited for applications that require detection of changes in reflectivity. This change in reflectivity can be due to a color change at a fixed distance, such as when sensing a black line on a white background, as well as due to a change in the distance to or presence of an object in front of the sensor. Just like the 16-channel medium-density arrays we released in December, the 13-channel medium-density modules use PCBs specifically designed for an 8 mm pitch that allow separate control of the odd and even emitters, which gives you extra options for detecting light reflected at various angles. They have the same board dimensions (101 × 16.5 mm) and mounting hole locations as the high-density (4 mm pitch) 25-channel arrays, but the pinout is different.
|
|
||
|
|

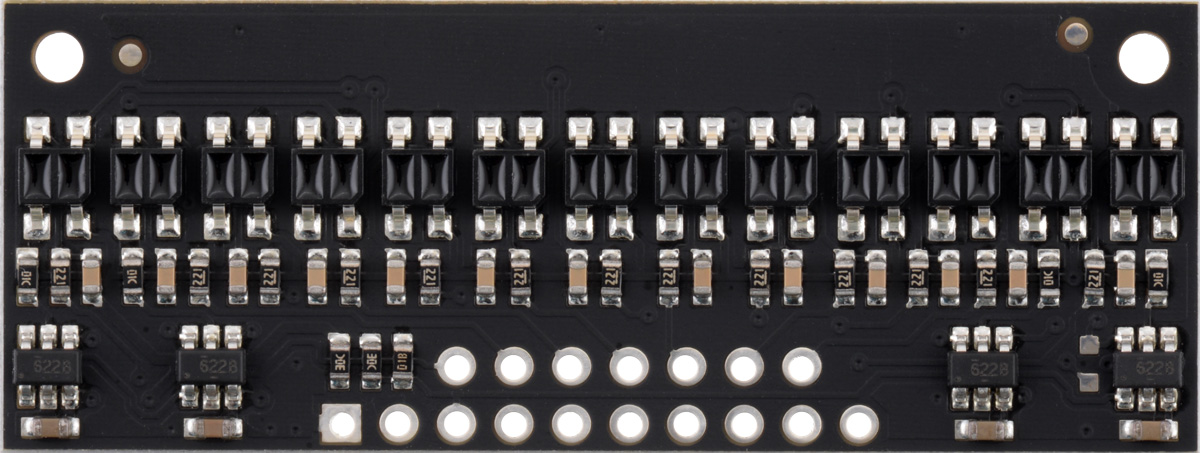


Each of these is available with two sensor options—traditional QTR and high-performance, low-current QTRX—and with analog or digital (RC) outputs, making 16 new products in all. Check out the QTR reflectance sensor category to see our full selection of new-style QTRs with black PCBs, which now stands at 96 varieties, and don’t forget to use our QTR introductory promotion to get 50% off any of these new sensors! (Limited to the first 100 customers who use coupon code QTRINTRO, limit 3 per item per customer.)
Related products
















New product: Tic T249 USB Multi-Interface Stepper Motor Controller

I am excited to announce the release of the Tic T249 USB Multi-Interface Stepper Motor Controller, the fourth model in our line of Tic Stepper Motor Controllers. The Tic T249, which is based on the TB67S249FTG IC from Toshiba, features a broad 10 V to 47 V operating range and can deliver up to approximately 1.8 A per phase without a heat sink or forced air flow, making it our highest-power Tic yet. In addition to the array of high-level features offered by the other members of our Tic family, the Tic T249 offers access to several innovative features of the TB67S249FTG driver. Continued…
New product: STSPIN220 Low-Voltage Stepper Motor Driver Carrier with 1/256 microstepping

I am happy to announce our first new product of 2019, a carrier board for the STSPIN220 stepper motor driver, which operates all the way down to 1.8 V, making it our lowest-voltage stepper motor driver. And like its higher-voltage sibling, the STSPIN820 that we released a few months ago, it offers microstepping down to 1/256 steps. This new carrier board has the same 16-pin, 0.6″ × 0.8″ form factor as our other popular stepper motor drivers, and as with our STSPIN820 carrier, it inverts the enable input so that it has the more familiar functionality of those drivers (but be careful not to pop these into a 12 V or 24 V socket!).
By the way, keep in mind that you do not necessarily need a low-voltage stepper motor driver just because your stepper motor has a low rated voltage. The voltage rating is just the voltage at which your stepper motor will draw its rated current, and it’s really the current rating that you need to be careful about if you want to avoid damaging your stepper motor. All of our stepper motor drivers let you limit the maximum current, so as long as you set the limit below the rated current, you will be within spec for your motor, even if the voltage exceeds the rated voltage. In general, using a high supply voltage along with active current limiting allows for better performance, so the main reason for using a low-voltage stepper motor driver like the STSPIN220 is if your supply voltage is constrained to some low value by some other aspect of your system.
This new release brings our selection of stepper motor drivers in this compact form factor to eleven:
 A4988 (original) |
 A4988, Black Ed. |
 DRV8825 |
 DRV8834 |
 DRV8880 |
 MP6500, Pot. CC |
 MP6500, Digital CC |
 TB67S279FTG |
 TB67S249FTG |
 STSPIN820 |
 STSPIN220 |
|
|---|---|---|---|---|---|---|---|---|---|---|---|
| Driver chip: | A4988 | DRV8825 | DRV8834 | DRV8880 | MP6500 | TB67S279FTG | TB67S249FTG | STSPIN820 | STSPIN220 | ||
| Min operating voltage: | 8 V | 8.2 V | 2.5 V | 6.5 V | 4.5 V | 10 V | 10 V | 7 V | 1.8 V | ||
| Max operating voltage: | 35 V | 45 V | 10.8 V | 45 V | 35 V | 47 V | 47 V | 45 V | 10 V | ||
| Max continuous current per phase:(1) | 1 A | 1.2 A | 1.5 A | 1.5 A | 1 A | 1.5 A | 1.1 A | 1.6 A | 0.9 A | 1.1 A | |
| Peak current per phase:(2) | 2 A | 2.2 A | 2 A | 1.6 A | 2.5 A | 2 A | 2 A | 4.5 A | 1.5 A | 1.3 A | |
| Microstepping down to: | 1/16 | 1/32 | 1/32 | 1/16 | 1/8 | 1/32 | 1/32 | 1/256 | 1/256 | ||
| Board layer count: | 2 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| Special features: | high current | low-voltage operation, high current |
AutoTune, digital current reduction |
high current | digital current control, high current |
Auto Gain Control, ADMD, high max voltage |
Auto Gain Control, ADMD, high max voltage, high current |
128 and 256 microsteps, high max voltage |
64, 128, and 256 microsteps, low-voltage operation |
||
| 1-piece price: | $8.95 | $9.95 | $15.95 | $9.95 | $8.95 | $9.95 | $9.95 | $11.75 | $13.95 | $18.95 | $10.95 |
| 1 On Pololu carrier board, at room temperature, and without additional cooling. 2 Maximum theoretical current based on components on the board (additional cooling required). |
|||||||||||
Last year, we began offering introductory specials to celebrate each newly released product, and we are continuing with that this year: the first 100 customers that use coupon code STSPIN220INTRO can get up to five units at just $3.77 each.
Related products


New products: 16-channel QTR MD reflectance sensor arrays
 |
 |
QTR-MD-16A Reflectance Sensor Array. |
|---|
We now have 16-sensor, medium-density (8mm-pitch) versions of our new QTR reflectance sensor arrays. Like the versions already released, these new modules are available in analog and RC configurations and with two different sensor types, resulting in four new products in all:
- QTR-MD-16RC Reflectance Sensor Array
- QTR-MD-16A Reflectance Sensor Array
- QTRX-MD-16RC Reflectance Sensor Array
- QTRX-MD-16A Reflectance Sensor Array
Unlike the medium-density (MD) arrays we have released previously, which just use the high-density PCBs in partially populated configurations, these new 16-channel modules use PCBs specifically designed for an 8 mm pitch. As a result, these are the first MD versions that allow separate control of the odd and even emitters, which gives you extra options for detecting light reflected at various angles. They have the same board dimensions (125 × 16.5 mm) and mounting hole locations as the high-density (4mm-pitch) 31-channel arrays, but the pinout is different.
 |
QTR-MD-16A Reflectance Sensor Array. |
|---|
 |
QTR-HD-31A Reflectance Sensor Array. |
|---|
For more information on our new QTR sensor family, you can see some of our previous blog posts about the versions we have already released:
- New products: 1- and 31-channel QTR HD reflectance sensor arrays
- New products: more new QTR HD sensor arrays by student engineering interns
- New products: QTR HD sensor arrays by student engineering interns
- New product: high-density QTR reflectance sensor arrays
Don’t forget to get in on our QTR introductory promotion! Be one of the first 100 customers to use coupon code QTRINTRO and get any of these new sensors at half price! (Limit 3 per item per customer.)
Related products




New product: 5-Channel Reflectance Sensor Array for Balboa 32U4 Balancing Robot
|
|
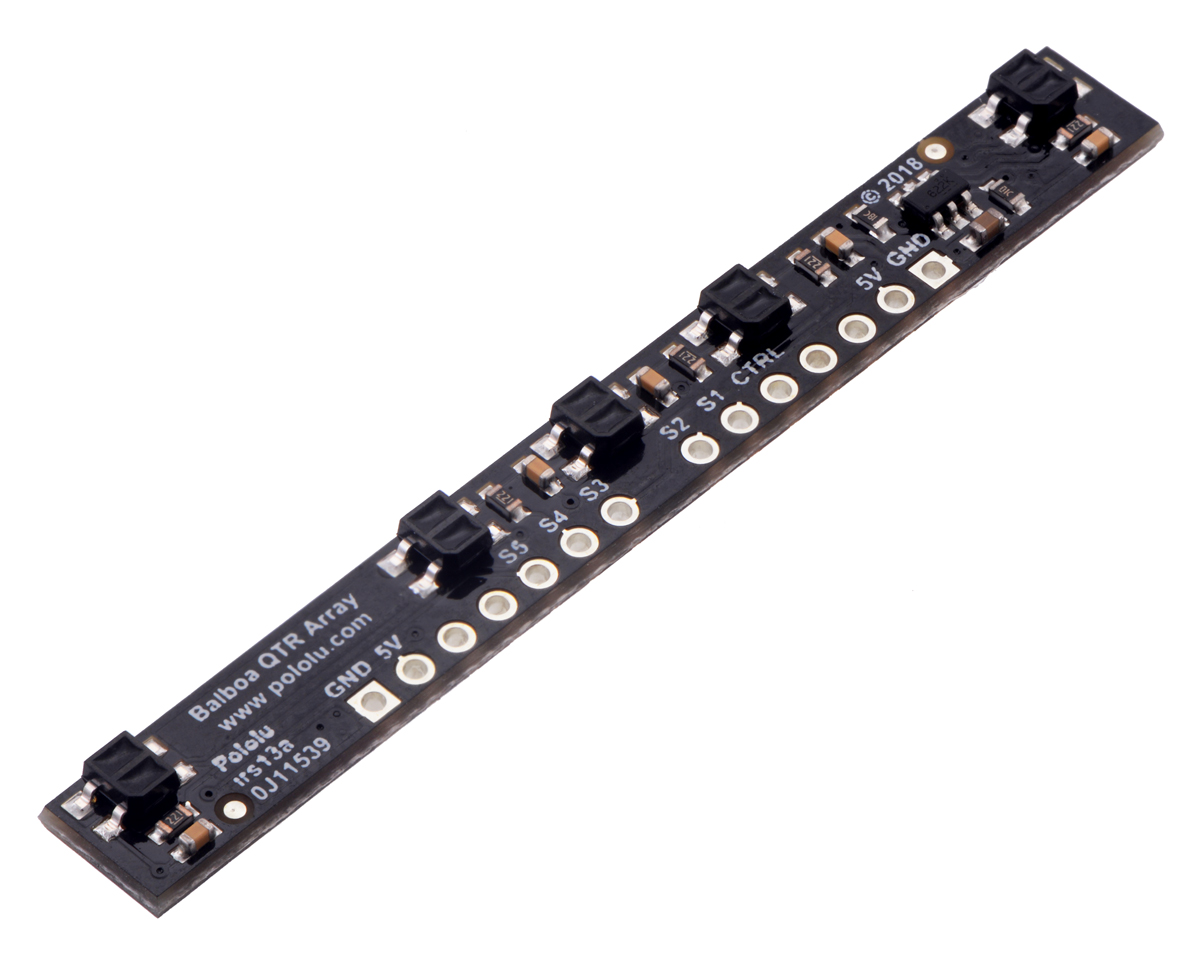

We now have a 5-Channel Reflectance Sensor Array designed specifically for use with the Balboa 32U4 Balancing Robot. The array mounts to the Balboa 32U4 control board and provides an easy way to add line sensing to the Balboa (but following a line while balancing is actually kinda hard—and that part is up to you, should you accept the challenge).
The array features five IR emitter/phototransistor pairs with dimmable brightness control similar to our line of QTR reflectance sensors.
As with all of our new products this year, we are offering an introductory special. The sensor by itself is already inexpensive, so just discounting that did not seem exciting enough. To make it more celebratory, we decided to offer a special promotion for the whole Balboa package: you can get a Balboa 32U4 robot kit with motors, wheels, and the new 5-Channel Reflectance Sensor Array for just $79! To get the discounted price, add this special promotion product bundle and coupon code BALBOAREFLECT to your cart. Offer is limited to the first 100 customers, limit one per customer. If you already have a Balboa, or if you want different motors or wheels than what’s included in the bundle, you can use coupon code BALBOAREFLECT2 to save 35% (limit 2 per item).

Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










