RoboClaw 2x60AHV, 60VDC Motor Controller (V6)

The RoboClaw motor controllers from Basicmicro (formerly Ion Motion Control) can control a pair of brushed DC motors using USB serial, TTL serial, RC, or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system. This version can supply a continuous 60 A per channel (120 A peak) and operates up to 60 V.
Alternatives available with variations in these parameter(s): motor channels continuous output current per channel Select variant…
| Description | Specs (8) | Pictures (4) | Resources (4) | FAQs (0) | On the blog (1) | Distributors (0) |
|---|
Overview
The RoboClaws from Basicmicro (formerly Ion Motion Control) are a family of efficient, versatile, synchronous regenerative motor controllers. They can supply brushed DC motors with 7.5 A, 15 A, 30 A, 45 A, 60 A, 120 A, or 300 A continuous (depending on the model) at voltages from 6 V to 34 V, 6 V to 60 V, or 10.5 V to 60 V (also depending on the model), and they allow for peak currents well above the maximum continuous ratings. The “Solo” versions feature a single motor control channel while the dual versions (denoted by a “2x” in their names) offer two channels for controlling a pair of motors.
 Solo 30A |
Solo 60A |
 Solo 300A |
 2x7A |
 2x15A |
 2x30A |
2x45A ST 2x45A |
 2x60A |
 2x60AHV |
 2x200A |
|
|---|---|---|---|---|---|---|---|---|---|---|
| Motor channels: | 1 | 1 | 2 | |||||||
| Operating voltage: | 6 V to 34 V | 6 V to 60 V | 6 V to 34 V | 10.5 V to 60 V | ||||||
| Continuous output current: | 30 A | 60 A | 300 A | 7.5 A | 15 A | 30 A | 45 A | 60 A | 60 A | 200 A |
| Peak output current: | 60 A | 120 A | 300 A | 15 A | 30 A | 60 A | 60 A | 120 A | 120 A | 200 A |
| 5V BEC(1) max current: | 1.2 A | 1.2 A (V5B or later) | 3 A | 1.2 A (V7 or later) | 3 A | |||||
| Size: | 60 × 32.5 × 23.5 mm | 99 × 72.6 × 30 mm | 48 × 42 × 17 mm | 74 × 52 × 17 mm | 100 × 86 × 30 mm | 100 × 86 × 30 mm | 155 × 126 × 50 mm | |||
| Weight: | 130 g | 340 g | 20 g | 60 g | 300 g | 1200 g | ||||
| Price: | $89.95 | $119.95 | $499.95 | $79.95 | $99.95 | $134.95 | $179.95 | $229.95 | $299.95 | $599.95 |
1 Battery Eliminator Circuit
The RoboClaws have a USB interface that acts as a virtual serial (COM) port, allowing it to be controlled directly from a computer, and they feature built-in commands for controlling acceleration, deceleration, distance, speed, current sense, voltage limits and more. Several other interface modes are supported by the RoboClaw as well: it can be controlled via TTL serial for use with embedded systems, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), or analog voltages for use with potentiometers or analog joysticks.
RoboClaw automatically supports 3.3V or 5V logic levels, travel limit switches, home switches, emergency stop switches, power supplies, braking systems and contactors. Power supplies can be used by enabling the built in voltage clamping control feature. A built-in switching mode BEC supplies 5VDC at up to 1.2 A or 3 A (depending on controller model) for powering user devices.
The RoboClaws can be operated without feedback for open-loop speed control, or they can be used with a variety of feedback types for closed-loop speed or position control. Quadrature encoders with up to 19.6 million pulses per second are supported and can be auto tuned using Motion Studio, which is a free downloadable application. In addition, a wide range of sensor inputs such as potentiometers and absolute encoders are supported. RoboClaw’s closed loop functionality creates absolute control over speed and direction regardless of load changes.
RoboClaw incorporates several protection features including temperature, current, over voltage and under voltage limits. Several user definable settings such as maximum current limit, maximum and minimum battery voltages are provided for more refined control. The controller uses regenerative braking but can be configured with a voltage clamp circuit to limit the regenerative voltage when used with switching power supplies. The Basicmicro VClamp is a voltage clamp specifically designed to work with the RoboClaw and MCP to suppress such voltage spikes and is rated for use with supplies up to 60 V and currents up to 60 A.
Details for item #3581
With an operating supply range of 10.5 V to 60 V, the RoboClaw 2x60AHV is a higher-voltage version of the 2x60A (V6), which operates from 6 V to 34 V. The AHV also has a slightly modified heat sink, which features several tapped holes that can be used for directly mounting a pair of cooling fans. Aside from the sub-millimeter-tall bosses surrounding each tapped hole, the heat sink’s outer dimensions remain the same. This RoboClaw features a USB Micro-B connector that works with our USB micro-B cables.
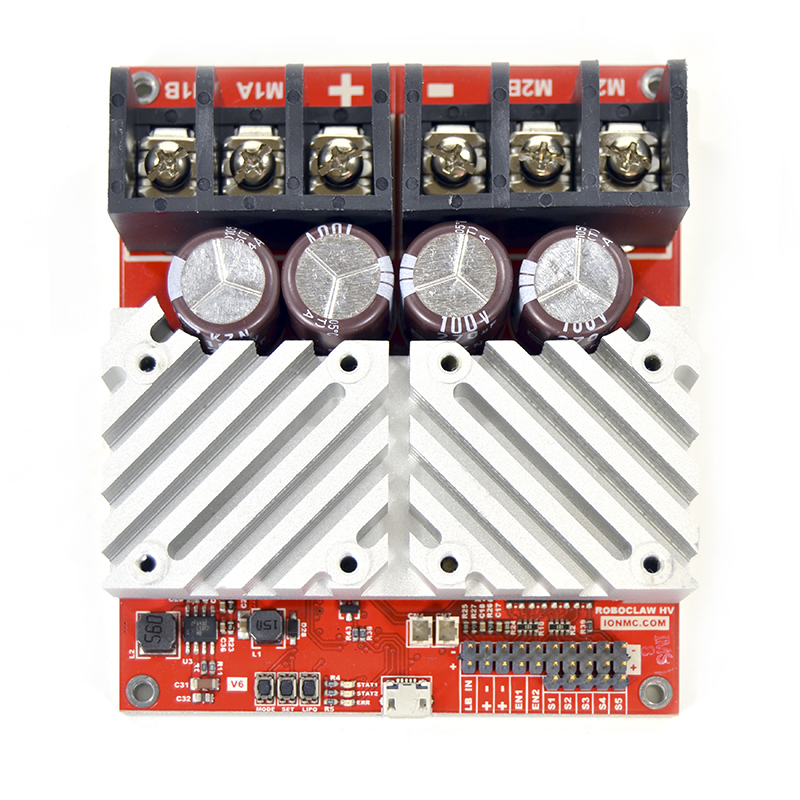 |
RoboClaw 2×60AHV, 60VDC Motor Controller. |
|---|
Key features of the RoboClaw family
- Simple bidirectional control of one or two brushed DC motors, depending on controller model
- 6 V to 34 V, 6 V to 60 V, or 10.5 V to 60 V operating supply range, depending on controller model
- 7.5 A to 300 A maximum continuous current output, depending on controller model
- Dual-channel controllers support channel bridging to allow control of a single motor with double the current capability
- Automatic current limiting reduces duty cycle when temperature exceeds 85° C
- Four communication or control options:
- USB serial interface (virtual COM port)
- Logic-level (TTL) serial interface for direct connection to microcontrollers or other embedded controllers
- Hobby radio control (RC) pulse width interface for direct connection to an RC receiver or RC servo controller
- Analog voltage (0 V to 2 V, 5 V tolerant) interface for direct connection to potentiometers and analog joysticks
- Dual feedback inputs for PID closed-loop control:
- Speed or position control with quadrature encoders, up to 19.6 million encoder pulses per second
- Position control with analog encoders or potentiometers
- (Open-loop control with no feedback also available)
- Screw terminals for quick connect/disconnect
- Configurable via pushbutton interface or USB connection and PC software
- Regenerative braking
- Tolerates high-speed direction changes
- Jumper-selectable 5 V BEC
- Battery monitoring and under-voltage cutoff protects batteries from over-discharging
Sample code
Basicmicro has written an Arduino library for the RoboClaw that makes it easy to interface these motor controllers with an Arduino. The library comes with several example sketches that demonstrate different methods of controlling the RoboClaw. They also have an application note that shows how to use their libraries to control a RoboClaw with an A-Star 32U4 programmable controller.
Note: Basicmicro was formerly Ion Motion Control and Orion Robotics. Basicmicro uses the following product names and numbers for the RoboClaw controllers:
“RoboClaw Solo 30A Motor Controller”, Item Id: ION408/IMC408
“RoboClaw Solo 60A Motor Controller”, Item Id: ION410/IMC410
“RoboClaw Solo 300A Motor Controller”, Item Id: IMC406
“RoboClaw 2x7A Motor Controller”, Item Id: ION404/IMC404 (replaces “RoboClaw 2x5A”, Item Id: ION403/IMC403)
“RoboClaw 2x15A Motor Controller”, Item Id: ION412/IMC412
“RoboClaw 2x30A Motor Controller”, Item Id: ION413/IMC413
“RoboClaw 2x45A Motor Controller”, Item Id: ION418/IMC418
“RoboClaw ST 2x45A Motor Controller”, Item Id: ION419/IMC419
“RoboClaw 2x60A Motor Controller”, Item Id: ION414/IMC414
“RoboClaw 2x60AHV Motor Controller”, Item Id: ION415/IMC415
“RoboClaw 2x160A Motor Controller”, Item Id: ION426/IMC426
RoboClaw versions V5 and above have USB Micro-B connectors; older USB RoboClaws had a USB Mini-B connector. The RoboClaw 2×160A uses a USB B connector.
Related products










Related categories













Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
