Pololu Blog »
Pololu Blog (Page 79)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New product: Machined Aluminum Bracket for 37D mm Metal Gearmotors
 |
We have released a new machined aluminum bracket that lets you securely mount our 37D mm metal gearmotors to your project. The bracket has six holes on its face that line up with the 37D gearbox’s mounting holes, and it has three tapped holes on the bottom. Nine M3 screws are included for securing the bracket to the motor and mounting surface.
New products: QTR-3A and QTR-3RC Reflectance Sensor Arrays
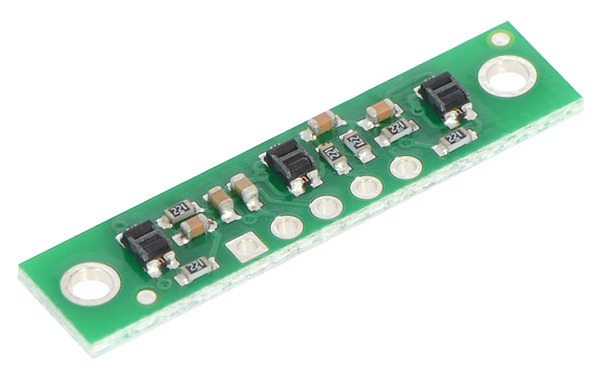 |
Our new QTR-3A and QTR-3RC reflectance sensor arrays pack three IR emitter and receiver (phototransistor) pairs onto a board measuring just 1.25″ × 0.3″ (32 mm × 8 mm). With the sensors mounted on a 0.375″ pitch, these sensor arrays are great for sensing 3/4″ black electrical tape when used as minimal detectors on line-following robots!
Two versions of these sensor modules are available: the QTR-3A provides three analog voltage outputs, while the QTR-3RC provides three digital pulse signals that can be read with digital I/O lines.
New product: Sparkfun Starter Kit for RedBoard
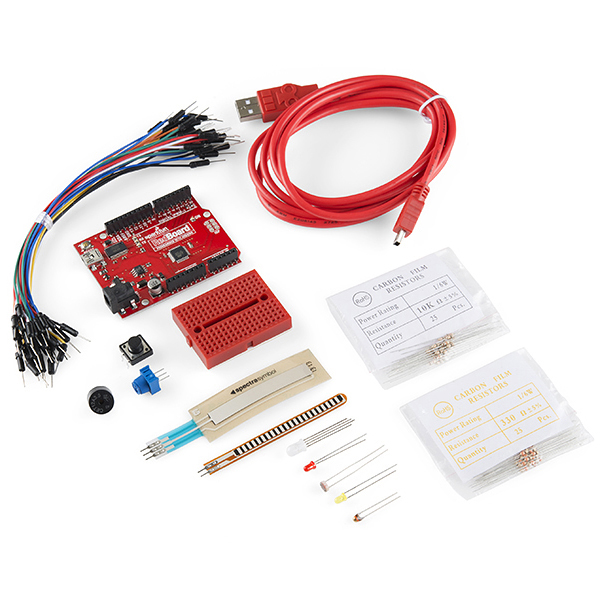 |
The SparkFun Starter Kit for RedBoard is an easy way to get started building entertaining and educational circuits with SparkFun’s RedBoard, an Arduino clone that is compatible with the Uno R3. The kit includes a RedBoard along with various types of sensors and indicators. A downloadable guide features example projects to introduce you to the world of embedded electronics.
Video: Getting started with the Maestro
We are excited to release this new video for our Maestro Servo Controllers! Get some ideas for cool things you can do with the Maestro, and see how easy it is to get started with our custom software. This is the first of many fun new Pololu videos to come! Let us know what you think or what other products you would like to see in action in the comment section below.
Products featured in this video:
- Maestro Servo Controllers
- Power HD High-Torque Servo 1501MG
- SpringRC SM-S4303R Continuous Rotation Servo
- Rechargeable NiMH Battery Pack
- Pololu RP5/Rover 5 Expansion Plate
- Emily’s T-shirt
Projects featured in this video:
- Simple Hexapod Walker
- Mars Rover from Beatty Robotics
- Brian Patton’s PsychoRowRow featuring talking robots from Robodyssey
Related products








Lunokhod
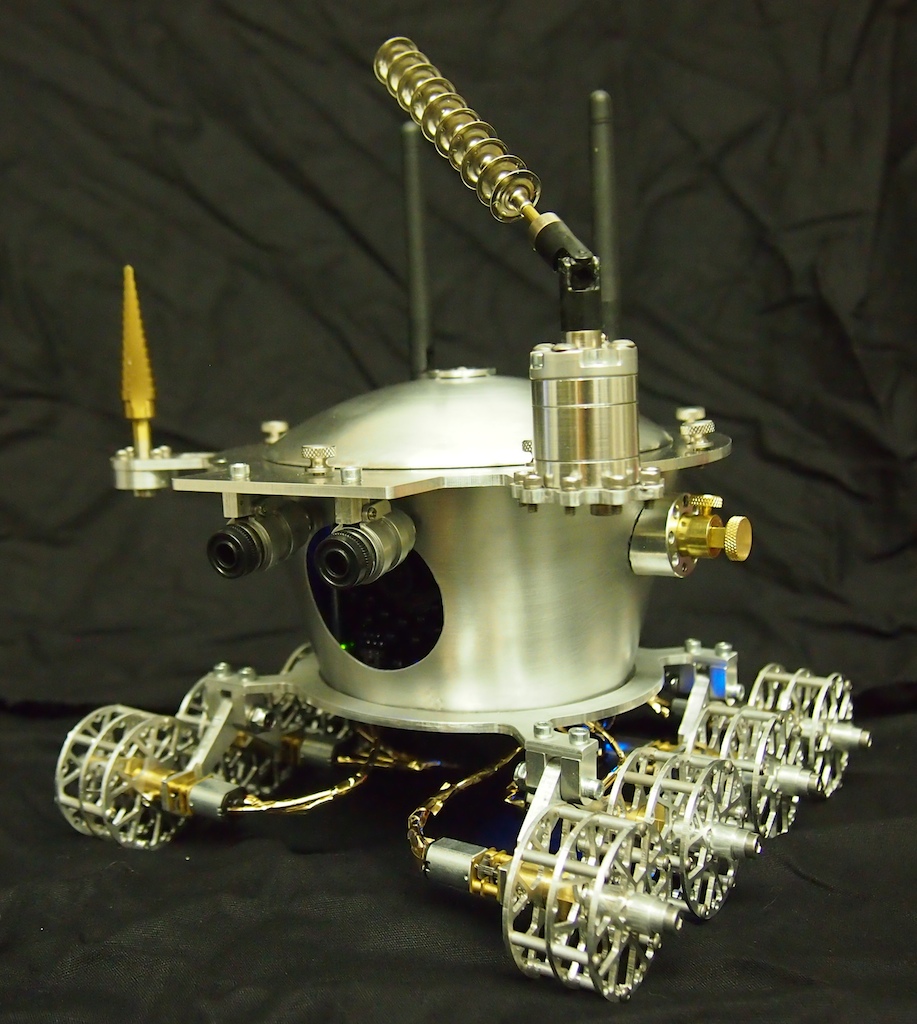 |
Lunokhod, which means “Moon Walker” in Russian, was built for a space museum in Prague and is a miniature version of the first remote-controlled moon rover. It uses 8 of our 298:1 micro metal gearmotors and an Arduino Nano and can be remotely controlled by museum visitors. The rover was built by Beatty Robotics; you are can learn more about it on their blog.
Simple 18-servo hexapod
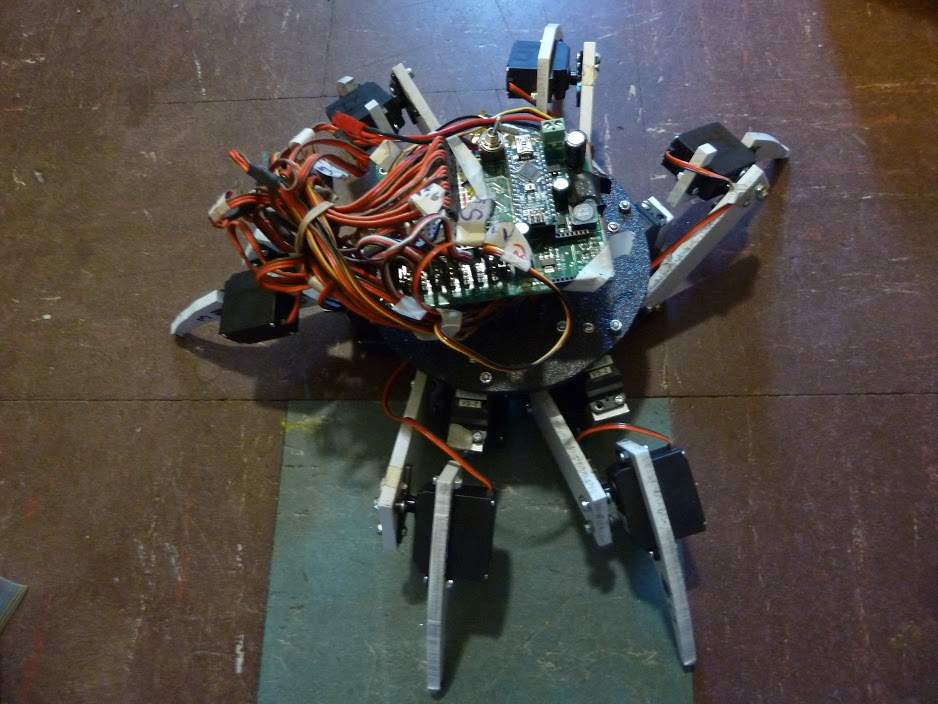 |
This instructable shows how to make a simple 18-servo hexapod robot that uses either just an Arduino or an Arduino and a Maestro to control its servos.
Featured link: http://www.instructables.com/id/Simple-18dof-Hexapod-Arduino-nano-optionally-wit/
New products: Step-up Voltage Regulators U1V11F3, U1V11F5, and U1V11A
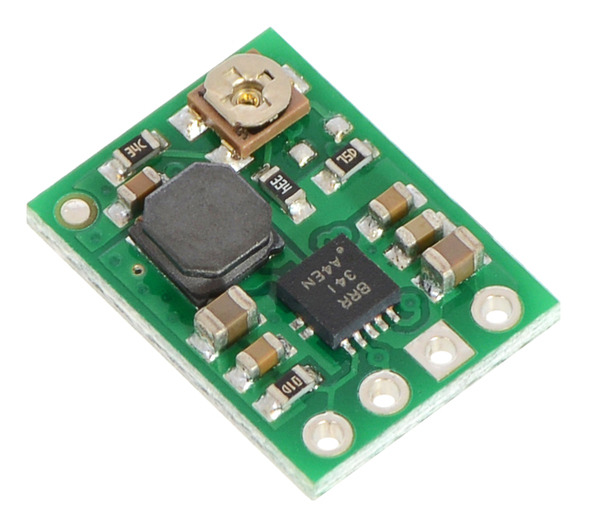 |
We have released three new step-up regulators that can boost input voltages as low as 0.5 V and have typical efficiencies between 70 and 90%. Unlike most boost regulators, these offer a true shutdown option that turns off power to the load. They also automatically switch to a linear down-regulation mode when the input voltage exceeds the output, making them great for powering electronics projects from 1 – 3 NiMH, NiCd, or alkaline cells or from a single lithium-ion cell.
These regulators are available with a 3.3 V or 5 V fixed output voltage or an adjustable output voltage (2 V – 5.25 V).
Underwater Vehicle for MATE ROV Competition
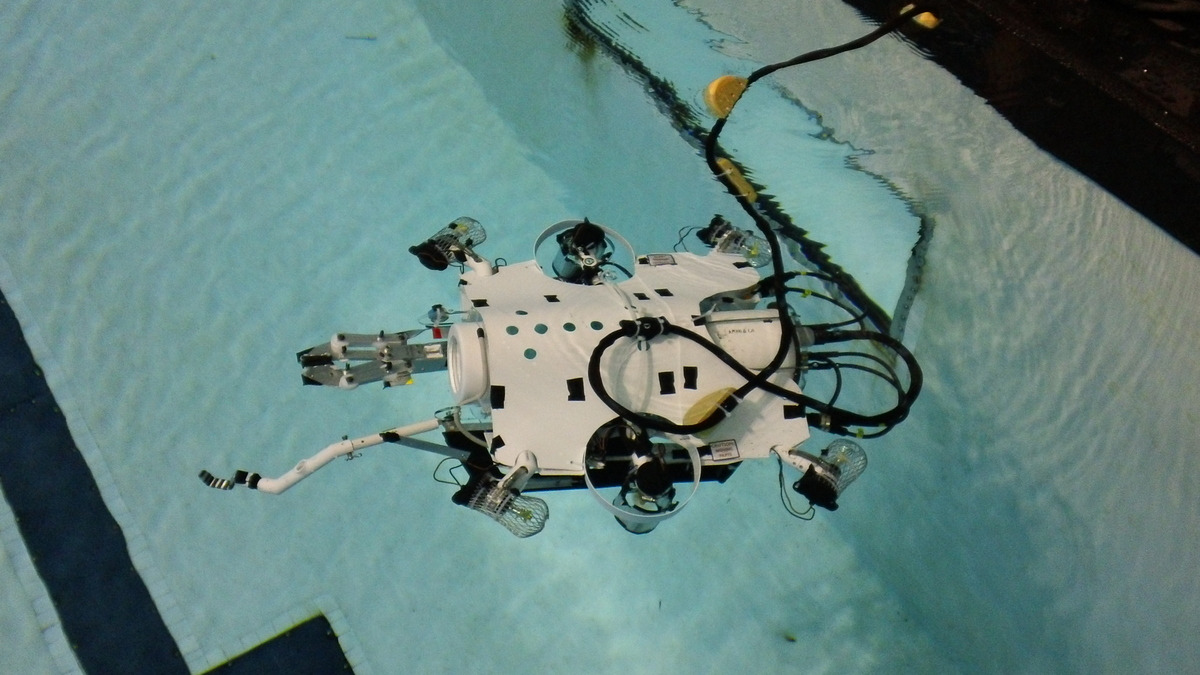 |
The AMNO & CO ROV team uses our Simple Motor Controllers in their remotely operated underwater vehicle. The team placed 13th at the 12th Annual MATE International ROV Competition (and 2nd in regionals)!
Featured link: https://www.facebook.com/AMNOandCoROV
Ball casters
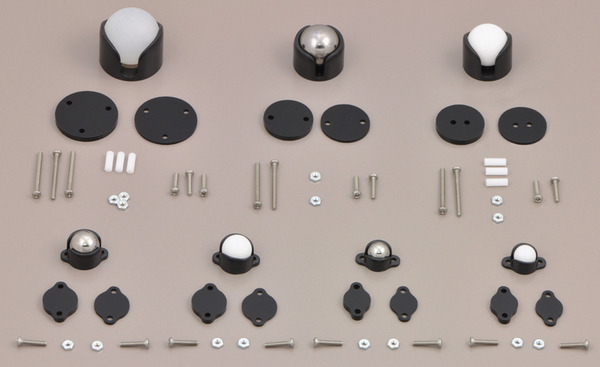 |
We’ve lowered the prices on all of our ball casters! Prices have dropped by $1 to $2 across the whole Pololu ball caster line and start as low as $1.99.
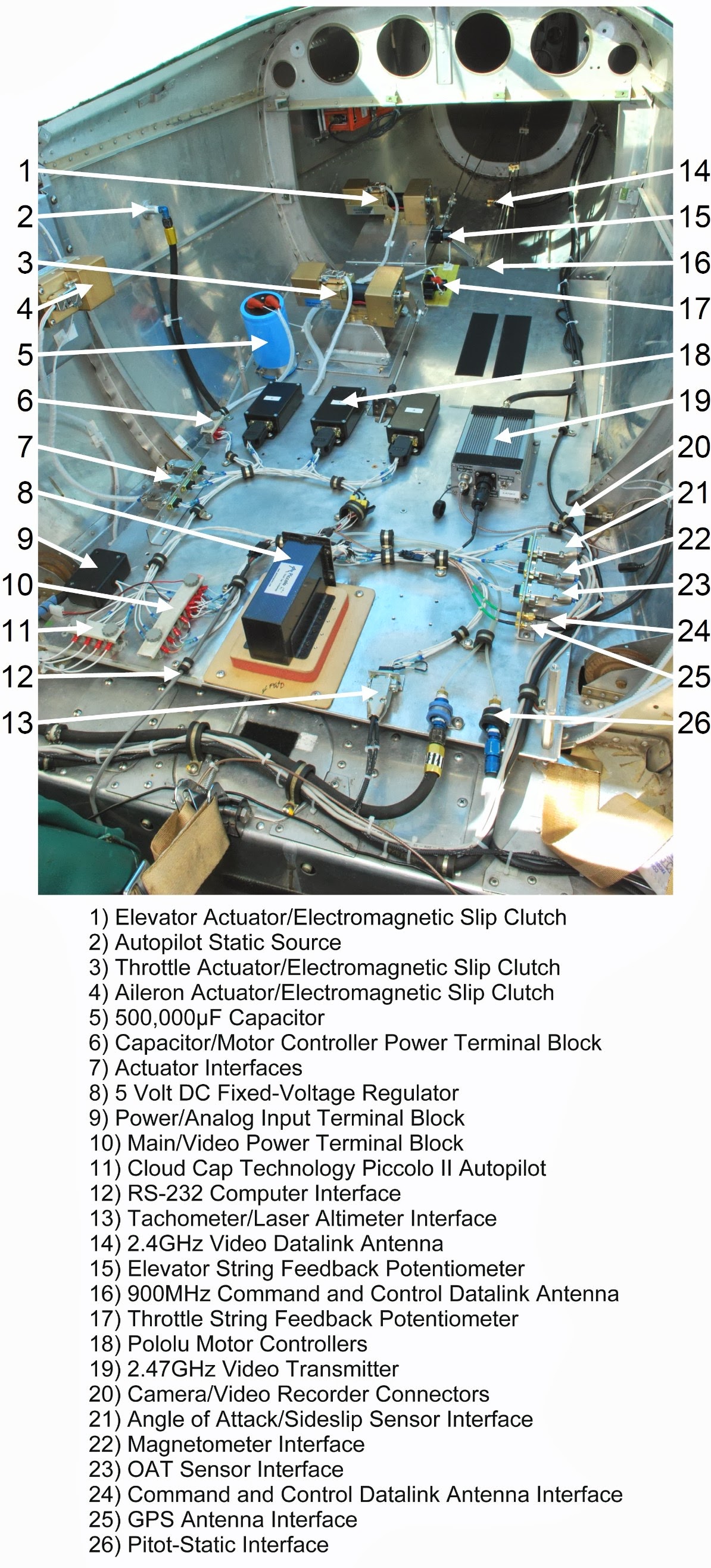
Flight Testing of a Surrogate UAV at the National Test Pilot School
 |
This “optionally piloted aircraft” is a Cessna 150 that customer Ryan Olson fitted with an autopilot and remote control system using the Pololu jrk 12v12. It is used for UAV training and development at the National Test Pilot School in Mojave, CA. Ryan’s AUVSI 2012 abstract is available online, and you can see some pictures of the internals below.
|
|

Related products



Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










