Pololu Blog »
Pololu Blog (Page 81)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
PiBBOT
This balancing robot by Mark Williams is controlled by a Raspberry Pi. The project web page explains the balance control algorithm. PiBBOT uses a Pololu MinIMU-9 v2, metal gearmotors with encoders, and Pololu wheels.
 |
Featured link: http://marks-space.com/2013/04/18/success-with-a-balancing-robot-using-a-raspberry-pi/
Rice University's r-one research robot
 |
This r-one research robot was designed to be low cost, so that researchers in the Multi-Robot Systems Lab at Rice University could make a swarm of robots. It uses our brackets, wheels and ball casters, and motors.
Featured link: http://mrsl.rice.edu/projects/r-one
Liquid Lifebar
This gadget uses a Pololu Jrk and a linear actuator to help control the level of water in the tube, which can indicate the life of a video game character.
Featured link: http://www.youtube.com/watch?v=ywfZsYApj_M
Mars Rover
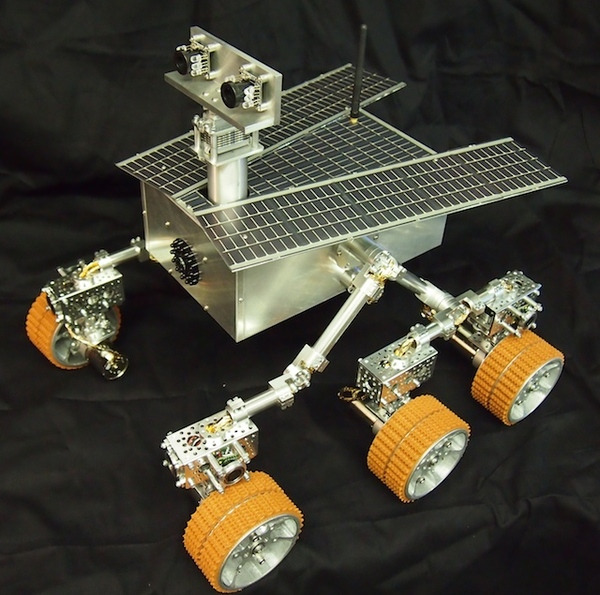 |
The Beatty family built a moving model of a Mars rover for the New York Hall of Science’s exhibit. They used a 12-channel Mini Maestro and step-down voltage regulators. Pictures and a link to a video are available on their blog.
Iron Man suit Micro Maestro tutorial
In this video, Jay May explains how to use the Micro Maestro to control his Iron Man suit.
Featured link: http://www.youtube.com/watch?v=bH4m_UqQ2js
Video tutorial on open- and closed-loop control using the Zumo
In this video, Brian Douglas demonstrates the difference between open-loop and closed-loop control in an uncertain environment using a Zumo Robot.
Featured link: http://www.youtube.com/watch?v=LfydfvHyikM
Related products



Geeky wedding
 |
This couple wanted an engineering-themed wedding, so they used e-textiles for their attire! The project used some Pololu voltage regulators.
Featured link: http://www.billporter.info/2013/04/22/our-geeky-wedding-electronic-wedding-attire/
RGB shoji lamp
 |
This Japanese-style lamp by Pololu engineer Kevin Chang was made from laser-cut parts and uses an RGB LED Satellite Module 001, a ShiftBar, and a Pololu Mini Maestro 12-channel servo controller.
Here is a video of the lamp in action:
Featured link: http://blog.kevinwchang.com/post/48595870556/rgb-shoji-lamp
Raspberry Pi Telepresence Rover
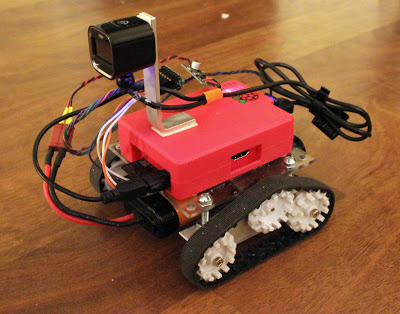 |
This tank rover by Michael Shimniok streams video to and can be controlled from a web browser. All rover functions are controlled directly by the Raspberry Pi with no additional microcontrollers. It uses our Pololu 30T Track Set, idler wheels, 150:1 Micro Metal Gearmotor MP, DRV8835 Dual Motor Driver Carrier, and Pololu Step-Down Voltage Regulator D15V35F5S3.
Featured link: http://www.bot-thoughts.com/2013/04/raspberry-pi-telepresence-rover.html
Fuzzbot
 |
Fuzzbot, by 12-year-old maker Quin of Qtechknow, helps clean the floors by dragging a dust cloth around while avoiding obstacles. The robot uses the Pololu Zumo Robot Kit for Arduino.
Related post: Qtechknow wins Educator’s Choice award at Maker Faire
Featured link: http://blog.makezine.com/2013/04/12/introducing-the-fuzzbot/


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation









