Pololu Blog »
Pololu Blog (Page 83)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Carambola Rover
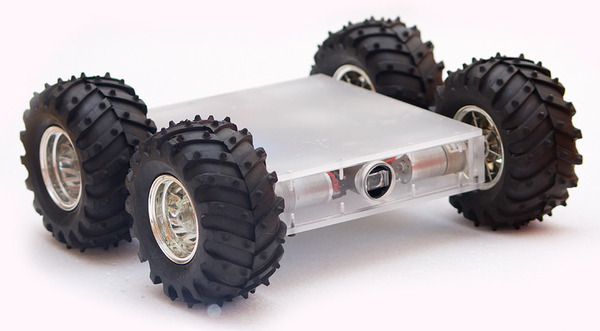 |
This rover by Saulius Lukse contains a Pololu Qik 2s12v10 dual serial motor controller and Dagu Wild Thumper wheels. It uses a Carambola wireless Linux module as its controller and can be controlled from an Android phone or tablet.
Featured link: http://lukse.lt/uzrasai/2013-01-carambola-powered-robot-v2/
BoboBOT
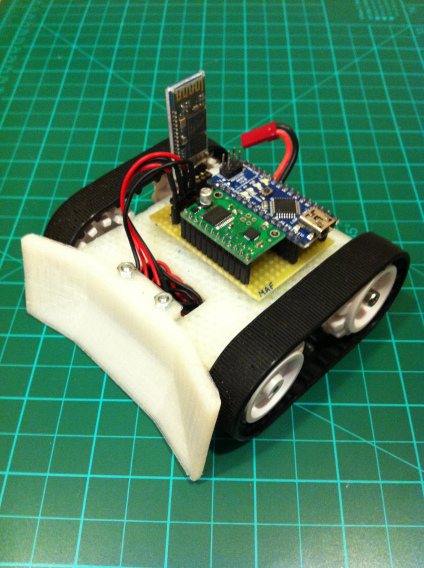 |
This robot has a 3d-printed chassis and uses Pololu micro metal gearmotors and a Pololu Qik 2s9v1 dual serial motor controller. BoboBOT can compete in Mini Sumo competitions, and under remote control, it can be used to solve Sokoban-style puzzles:
Featured link: http://madebyfrutos.wordpress.com/2013/01/12/bobobot/
Daryl robot
 |
This autonomous robot, “Daryl”, is based on an Arduino Uno and controlled with a touchscreen Java app. Daryl uses a TReX to control its motors and a Micro Maestro to pan a camera/sensor module.
Here are some videos of Daryl:
There is more information on the creator’s blog (in French) and in this forum post.
Featured link: http://forum.pololu.com/viewtopic.php?p=30049#p30049
BentoBot
 |
BentoBot is a robot designed to compete in a Mini Sumo competition. It uses a Zumo chassis, 100:1 micro gear motors, and a TB6612FNG motor controller. Here is a video of BentoBot competing at the 2012 Atlanta Hobby Robotics Club Robot Rally:
See this forum post for more pictures and information about BentoBot.
Featured link: http://forum.pololu.com/viewtopic.php?p=29649#p29616
Meeting with Governor's Office of Economic Development

I sort of had a meeting with the governor of Nevada this morning. I’m posting some notes about it mostly for others at Pololu, but maybe it will be interesting to other small businesses in Las Vegas. I probably should have been more prepared for the meeting; I still don’t know much about who was there or what exactly happened or what the stakes were, so a lot of my descriptions are kind of vague. Continued…
Bird Buggy
This robot by Andrew Gray is a mobile platform that a parrot can use for transportation. When the parrot leaves the platform, it uses a vision system to autonomously dock with a base station. Bird Buggy uses Wild Thumper wheels, Pololu 25D mm metal gearmotors, and a Pololu TB6612FNG dual motor driver carrier.
Featured link: https://sites.google.com/site/birdbuggy109/
Robockey
Robots in the “Robockey” tournament at Penn used Pololu motors, hardware, and wheels to build teams of fully-autonomous hockey-playing robots.
Featured link: http://www.youtube.com/watch?v=7njq2hFbw14
Raspberry Pi - Real Time Control via Android HTML5
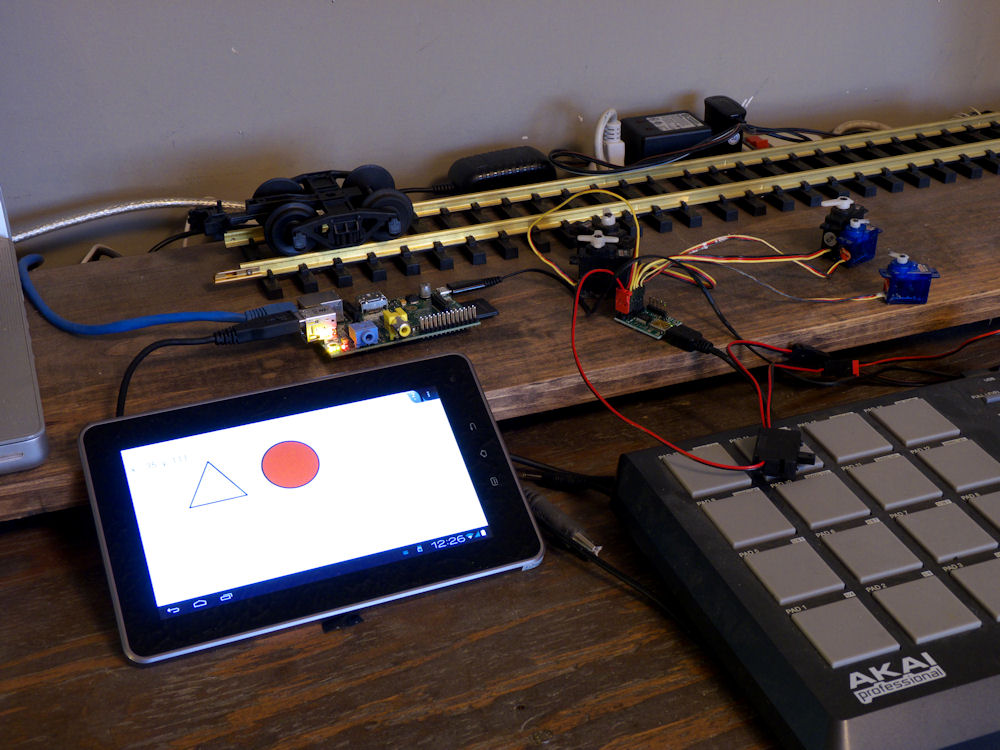 |
Martin Sant posted some code that does web-based real time control of the Pololu Micro Maestro 6 channel servo controller using a Raspberry Pi and the Tornado web server.
Featured link: http://martinsant.net/?page_id=479
More fun machines for us, better quality and lower prices for you

As we head into what is traditionally a week of heavy discounting, I want to give a little update about some new equipment that will be a foundation for our long-term commitment both to lowering prices and increasing the quality and sophistication of our products. Plus, I figure these kinds of machines are fun for our customers to look at. Continued…
Coke Can Robot
This autonomous robot can also be controlled by an old remote control to choose different actions. It uses our compact Step-Up/Step-Down Voltage Regulator S8V3A.
Featured link: http://www.youtube.com/watch?v=jgm9DhS7vS4


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










