Pololu Blog »
Pololu Blog (Page 87)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Trackduino P1213 Arduino shield
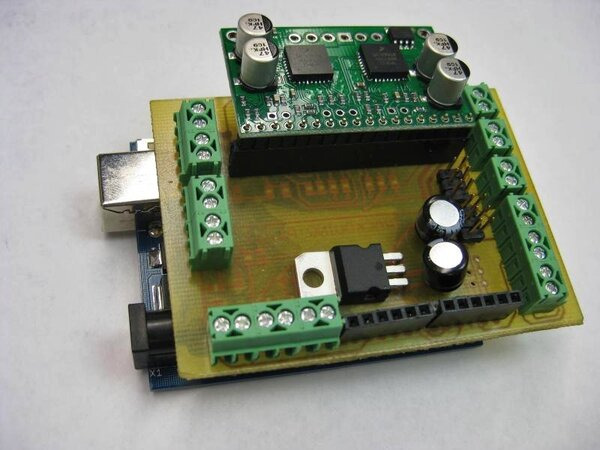 |
This custom Arduino by Craig Hollabaugh shield mounts a Pololu dual MC33926 motor driver carrier for easy control with an Arduino. For details, see his project video and build log: page 1, page 2, page 3.
Related products


W.A.V.E art performance using Arduino and Maestro Servo Controllers
An Arduino Uno and five Mini Maestro 24-Channel USB Servo Controllers are used to control an extensive installation for this art performance.

DIY fully-automatic book scanner
This do-it-yourself fully-automatic book scanner uses a Maestro servo controller to control the page-turning, and picture-taking servos. It was able to scan 468-page book in about 12 minutes with zero page-turning errors. For more information, see the DIY Book Scanner forum thread.
Featured link: http://www.youtube.com/watch?v=
Popular Mechanics Build Your First Robot
 |
Gordon McComb has published a project in Popular Mechanics called Build Your First Robot. The parts that Pololu offers are in this wish list, and more details are available on Gordon’s site.
Display for compass and accelerometer readings
 |
This forum post shows how to use a Baby Orangutan to read the accelerometer and compass values from an LSM303DLH and display them nicely on a 1.8" TFT LCD display. January 2012.
Related products


Controlling the Pololu 3pi Robot using a Joystick
This project by Pololu forum user Wilfredo shows how to control a 3pi robot by directly connecting two joystick outputs to two of its analog inputs. Here is a schematic of his setup:
 |
Schematic for controlling a Pololu 3pi robot using a joystick. |
|---|
Related products

Pololu round robot chassis kit assembly videos
This tutorial posted by Lonnie Honeycutt shows how to assemble a Pololu Chassis Completion Kit for RRC01A and a Pololu RRC01A robot chassis. The video playlist above show the assembly in detail.
Related products




Disco Dance Floor with Lights
This disco dance floor with ShiftBrite RGB lights is controlled by a Micro Maestro 6-Channel USB Servo Controller.
Related products


Dead Things Vlog 3-axis witch head
Pat from the Dead Things Vlog recently released this two-part video about programming the Micro Maestro 6-Channel USB Servo Controller to control a 3-axis witch head.
Related products
Paper Robots
Mike Estee has written up a three-part blog post about crafting hexapod chassis out of paper. The robots are controlled by 18-channel Maestro servo controllers.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
New Products










Same-day shipping, worldwide

|
US toll free: 1-877-7-POLOLU ~
(702) 262-6648 |
|||||||||||||||
| Catalog | Forum | Blog | Support | Ordering | Distributors | About | Contact | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|